




A Workpiece Positioning Method of an Array Type Flexible Fixture
-
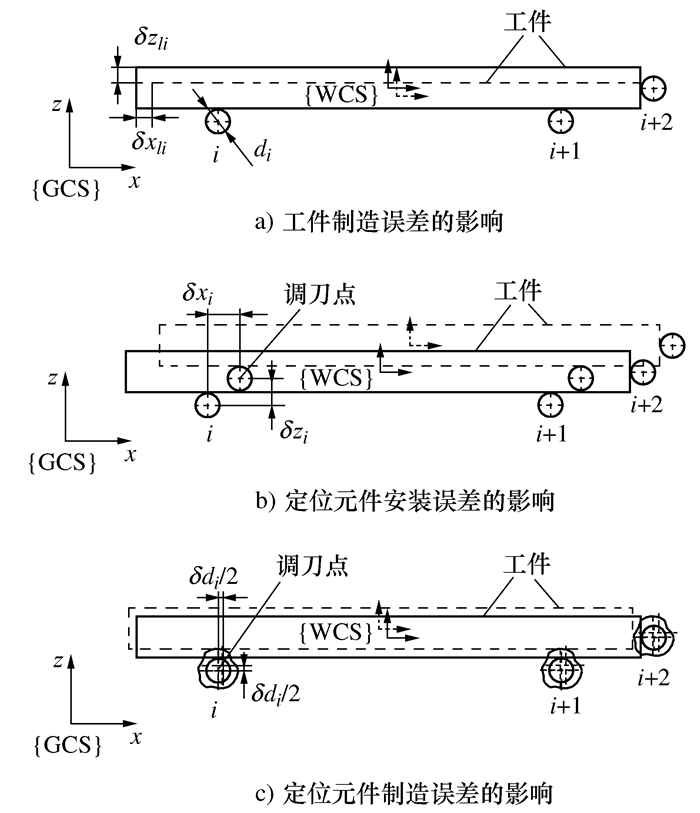
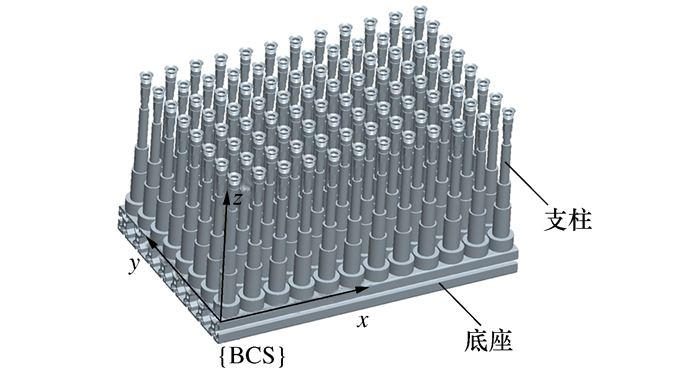
摘要: 提出了一种阵列式柔性夹具的工件定位方法。该方法首先采用投影法将工件和柔性夹具之间的定位问题转化为平面图形之间的定位问题,并基于平面区域和点的包含关系生成多组定位方案。然后通过计算定位雅可比矩阵的秩,确定了定位方案的可靠性。最后建立了工件制造误差、定位元件的安装和制造误差到工件定位误差的传递模型,并根据对工件定位的误差要求来计算定位方案的准确性,按照最大偏差最小化的准则来选择最准确的定位方案。工件在阵列式柔性夹具上定位的实例表明所提出的方法能获得满足定位可靠性和准确性要求的定位方案。Abstract: A method for positioning the workpieces on a flexible fixture with array structure is proposed. Firstly, a projection method is used to transform the positioning problem between the workpieces and the flexible fixture into the positioning problem of planar graphics. And multiple positioning schemes are generated based on the inclusion relationship between the planar regions and points. Then the reliabilities of the positioning schemes are determined by calculating the rank of positioning Jacobian matrixes. Finally, the transfer model from the manufacturing errors of workpieces, installation and manufacturing errors of positioning elements to the workpiece positioning errors is established, and the accuracy of positioning schemes is calculated according to the requirement of workpiece positioning errors, and the most accurate positioning scheme is selected in terms of the criterion of minimizing maximum deviation. Examples of workpiece positioning on the array type flexible fixture show that the present method can obtain the positioning schemes that meet the requirements of positioning reliability and accuracy.
-
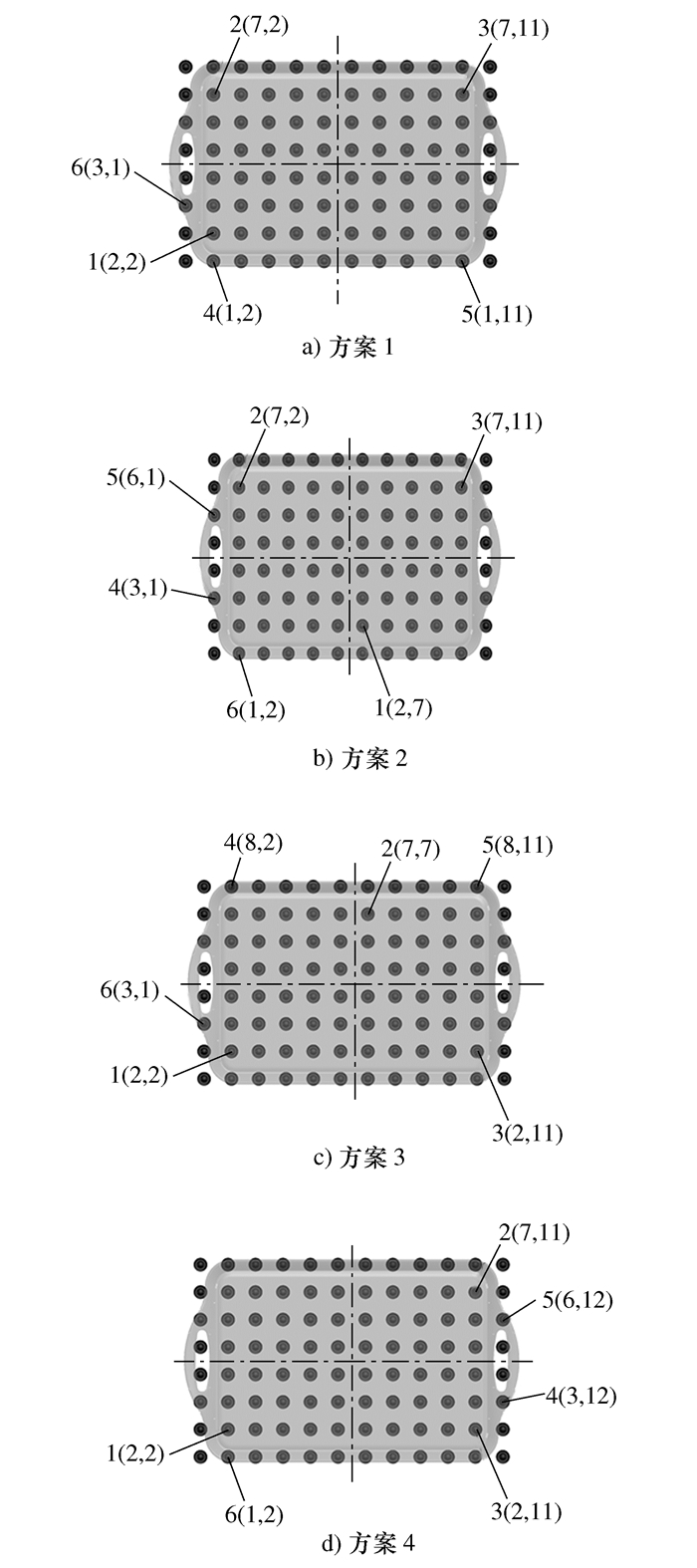
表 1 餐盘的4种定位方案中接触点坐标和单位法向量
支柱 (rciw)T (niw)T (2, 2) [64.061 7, 47.870 0, 0] [0, 0, -1] (7, 2) [64.061 7, 247.870 0, 0] [0, 0, -1] (7, 11) [424.061 7, 247.870 0, 0] [0, 0, -1] (1, 2) [64.061 7, 7.870 0, 7.573 1] [-0.127 6, -0.705 8, -0.696 8] (1, 11) [424.061 7, 7.870 0, 7.559 4] [0.127 9, -0.706 1, -0.696 5] (3, 1) [24.061 7, 87.870 0, 16.014 8] [-0.444 5, -0.046 3, -0.894 6] (2, 7) [264.061 7, 47.870 0, 0] [0, 0, -1] (6, 1) [24.061 7, 207.870 0, 16.016 0] [-0.444 4 0.0463-0.894 6] (7, 7) [424.061 7, 207.870 0, 0] [0, 0, -1] (2, 11) [424.061 7, 167.870 0, 0] [0, 0, -1] (8, 2) [424.061 7, 47.870 0, 0] [0, 0, -1] (8, 11) [424.061 7, 287.870 0, 7.564 3] [0.127 6 0.706 0-0.696 6] (3, 12) [464.061 7, 87.870 0, 16.016 5] [0.444 4-0.046 3-0.894 6] (6, 12) [464.061 7, 207.870 0, 16.014 4] [0.444 5 0.046 3-0.894 6]  下载: 导出CSV
下载: 导出CSV
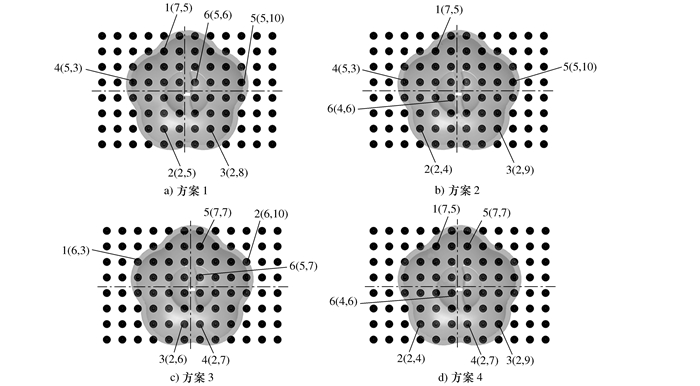
表 2 果盘盖的4种定位方案中接触点坐标和单位法向量
支柱 (rciw)T (niw)T (7, 5) [-60, 106.875 4, 39.256 8] [-0.711 6, 0.525 9, -0.466 0] (2, 5) [-60, -93.124 6, 14.529 0] [-0.247 4, -0.431 7, -0.867 4] (2, 8) [60, -93.124 6, 14.529 0] [0.247 4, -0.431 7, -0.867 4] (5, 3) [-140, 26.875 4, 50.361 9] [-0.913 3, 0.073 5, -0.400 7] (5, 10) [140, 26.875 4, 50.361 9] [0.913 3, 0.073 5, -0.400 7] (5, 6) [-20, 26.875 4, 24.614 5] [0.192 8, -0.259 0, -0.946 4] (2, 4) [-100, -93.124 6, 41.556 7] [-0.715 9, -0.473 2, -0.513 4] (2, 9) [100, -93.124 6, 41.556 7] [0.715 9, -0.473 2, -0.513 4] (4, 6) [-20, -13.124 6, 26.993 8] [0.140 2, 0.092 0, -0.985 8] (6, 3) [-140, 66.875 4, 68.500 7] [0, 0, -1] (6, 10) [140, 66.875 4, 68.500 7] [0, 0, -1] (2, 6) [-20, -93.124 6, 10.421 0] [0.052 9, -0.458 2, -0.887 3] (2, 7) [20, -93.124 6, 10.421 0] [-0.052 9, -0.458 2, -0.887 3] (7, 7) [20, 106.875 4, 14.257 9] [0.173 4, 0.470 3, -0.865 3] (5, 7) [20, 26.875 4, 24.614 5] [-0.192 8, -0.259 0, -0.946 4]
下载: 导出CSV
表 3 餐盘的四种定位方案的定位误差
方案 δx δy δz δα δβ δγ max{|δx|, |δy|, |δz|} max{|δα|, |δβ|, |δγ|} 1 [-0.035 4,
0.039 9][-0.025 6,
0.030 1][-0.005 0
0.010 0][-0.000 1,
0.000 1][-0.000 0,
0.000 0][-0.000 1,
0.000 1]0.039 9 0.000 1 2 [-0.073 1,
0.077 6][-0.043 0,
0.047 5][-0.012 1,
0.016 6][-0.000 1,
0.000 1][-0.000 0,
0.000 0][-0.000 4,
0.000 4]0.077 6 0.000 4 3 [-0.038 5,
0.043 0][-0.032 2,
0.036 7][-0.006 0,
0.010 5][-0.000 1,
0.000 1][-0.000 0,
0.000 0][-0.000 1,
0.000 1]0.043 0 0.000 1 4 [-0.171 3,
0.175 8][-0.105 5,
0.110 0][-0.005 5,
0.010 0][-0.000 1,
0.000 1][-0.000 0,
0.000 0][-0.001 2,
0.001 2]0.175 8 0.001 2
下载: 导出CSV
表 4 果盘盖的四种定位方案的定位误差
方案 δx δy δz δα δβ δγ max{|δx|, |δy|, |δz|} max{|δα|, |δβ|, |δγ|} 1 [-0.044 3,
0.046 3][-0.066 0,
0.068 0][-0.011 1
0.013 1][-0.000 3,
0.000 3][-0.000 3,
0.000 3][-0.000 8,
0.000 8]0.068 0 0.000 8 2 [-0.079 3,
0.081 3][-0.149 2,
0.151 2][-0.011 4,
0.013 4][-0.001 1,
0.001 1][-0.000 7,
0.000 7][-0.000 4,
0.000 4]0.151 2 0.001 1 3 [-0.110 6,
0.112 6][-0.108 3,
0.110 3][-0.019 4,
0.021 4][-0.000 4,
0.000 4][-0.000 0,
0.000 0][-0.000 8,
0.000 8]0.112 6 0.000 8 4 [-0.031 1,
0.033 1][-0.066 6,
0.068 6][-0.006 9,
0.008 9][-0.000 4,
0.000 4][-0.000 3,
0.000 3][-0.000 3,
0.000 3]0.068 6 0.000 4
下载: 导出CSV
-
[1] Wan X J, Xiong C H, Wang X F, et al. A machining-feature-driven approach to locating scheme in multi-axis milling[J]. International Journal of Machine Tools and Manufacture, 2010, 50(1):42-50 doi: 10.1016/j.ijmachtools.2009.09.008 [2] 吴玉光.基于工序要求的夹具定位方案自动规划方法[J].机械工程学报, 2010, 46(11):185-192 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201011028Wu Y G. Approach to automated location planning of fixture based on the processing procedure requirements[J]. Journal of Mechanical Engineering, 2010, 46(11):185-192(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201011028 [3] Qin G H, Ye H C, Cui Y, et al. Computer aided fixture design oriented modified design algorithm for fixture locating scheme[J]. Computer Integrated Manufacturing Systems, 2012, 18(10):2145-2150 http://en.cnki.com.cn/Article_en/CJFDTOTAL-JSJJ201210004.htm [4] Zheng Y, Qian W H. A 3-D modular fixture with enhanced localization accuracy and immobilization capability[J]. International Journal of Machine Tools and Manufacture, 2008, 48(6):677-687 doi: 10.1016/j.ijmachtools.2007.10.022 [5] Abedini V, Shakeri M, Siahmargouei M H, et al. Analysis of the influence of machining fixture layout on the workpiece's dimensional accuracy using genetic algorithm[J]. Proceedings of the Institution of Mechanical Engineers, Part B:Journal of Engineering Manufacture, 2014, 228(11):1409-1418 doi: 10.1177/0954405413519605 [6] Jiang K, Zhou X H, Li M, et al. Automatic approach of workpiece locating scheme in checking fixture design[J]. Computer Integrated Manufacturing Systems, 2014, 20(1):89-95 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjjczzxt201401011 [7] Bai X, Hu F, He G Y, et al. A memetic algorithm for multi-objective fixture layout optimization[J]. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2014, 229(16):3047-3058 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=d4730df83104790bcc1faa67488577c7 [8] Do M D, Son Y, Choi H J. Optimal workpiece positioning in flexible fixtures for thin-walled components[J]. Computer-Aided Design, 2018, 95:14-23 doi: 10.1016/j.cad.2017.09.002 [9] 秦国华, 吴竹溪, 张卫红.夹具定位方案的数学建模及其优化设计[J].中国机械工程, 2006, 17(23):2425-2429 doi: 10.3321/j.issn:1004-132X.2006.23.002Qin G H, Wu Z X, Zhang W H. Modeling and optimal design of fixture locating scheme[J]. China Mechanical Engineering, 2006, 17(23):2425-2429(in Chinese) doi: 10.3321/j.issn:1004-132X.2006.23.002 [10] Cai W, Hu S J, Yuan J X. A variational method of robust fixture configuration design for 3-D workpieces[J]. Journal of Manufacturing Science and Engineering, 1997, 119(4A):593-602 doi: 10.1115/1.2831192 [11] Qin G H, Zhang W H, Wan M, et al. A mathematical approach to analysis and optimal design of a fixture locating scheme[J]. The International Journal of Advanced Manufacturing Technology, 2006, 29(3-4):349-359 doi: 10.1007/s00170-005-2509-0 [12] 陈锡渠.现代机械制造工艺[M].北京:清华大学出版社, 2006Chen X Q. Modern machinery manufacturing process[M]. Beijing:Tsinghua University Press, 2006(in Chinese) -


 点击查看大图
点击查看大图
图(5) / 表(4)
计量
- 文章访问数: 329
- HTML全文浏览量: 222
- PDF下载量: 37
- 被引次数: 0
