




Human-robot Interaction Performance Evaluation for Assistive Assembly Exoskeleton in Fuselage
-
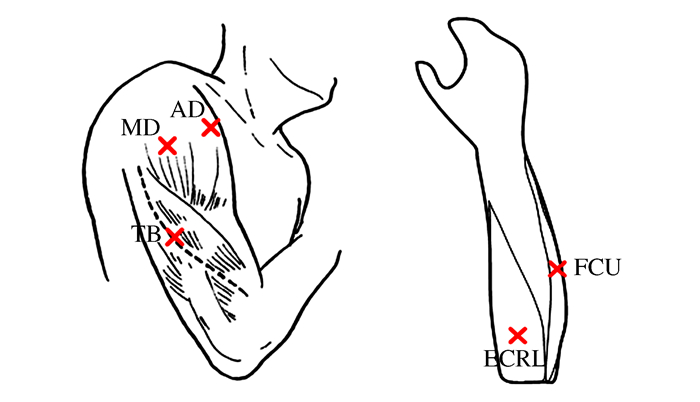
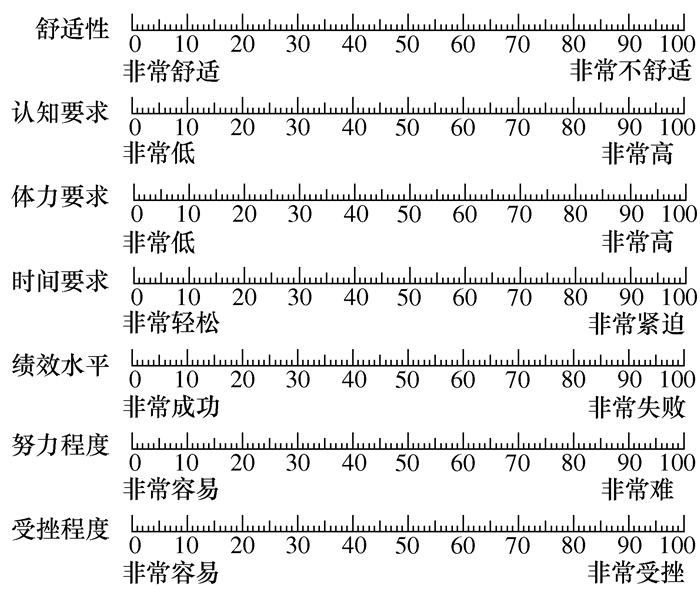
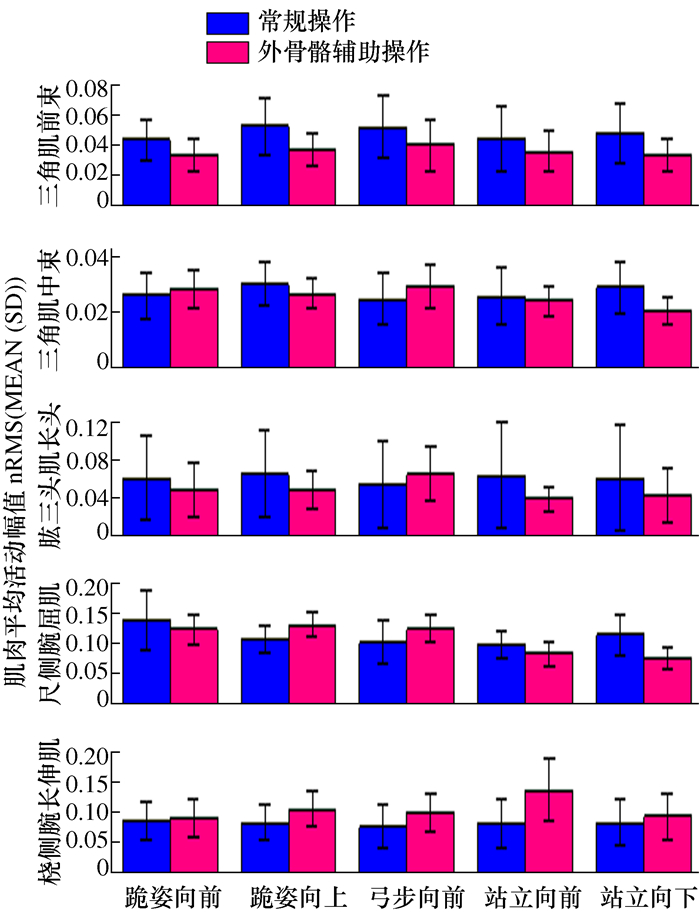
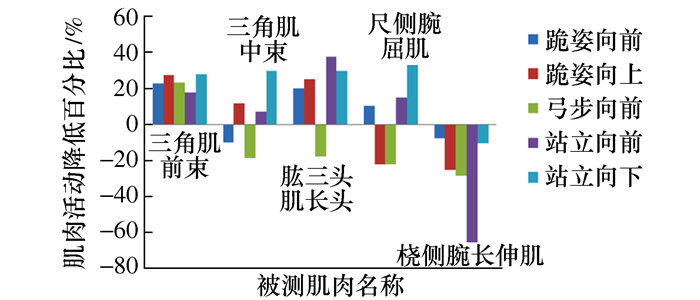
摘要: 为了测试辅助装配外骨骼的人机交互性能,10名工人在穿戴和不穿戴辅助外骨骼下,进行了实验室设计主客观实验测试,测量了手臂的肌肉活动、人机在手部接触压力,填写了扩展的NASA-TLX主观性能矩阵量表。结果显示辅助外骨骼装置整体上降低了手臂肌肉活动8.6%,降低了手部接触压力20%,其中外骨骼装置对于上臂肌肉活动降低具有更好的效果,达到20%,而对于前臂则造成了肌肉活动增加和操作灵活性的限制;主观性能矩阵量表结果表明,辅助外骨骼对于工人体力和绩效水平的帮助较大,然而增加了工人的认知负荷和受挫程度。因此,辅助外骨骼的使用降低了对工人的体力要求,但是其灵活性设计需要进一步改善。Abstract: In order to evaluate the human-robot interaction performance of the assistive assembly exoskeleton, 10 workers attended the subjective and objective experiments which were designed to test the subjects' muscle activities, hand contact pressure and the subjective extended NASA-TLX rating scales under the conditions of with and without exoskeleton in the laboratory. The results showed that the assistive assembly exoskeleton can help to decrease 8.6% of the muscle activities, 20% of the hand contact pressures of the overall upper right arm compared with the bare hand operations. And better benefits were acquired in the upper arm muscle activities, decreasing up to 20%. However the assistive assembly exoskeleton increased the muscle activities of the forearm, limited the operation flexibility as well. The results of the extended NASA-TLX rating scales illustrated that the physical demands were decreased, operation performances were increased. However the mental demands and frustration were also added. So the assistive exoskeleton helps to decrease the physical demands of the workers, but the adaptability of the exoskeleton should be further improved.
-
表 2 常规操作和外骨骼辅助操作下的上臂肌肉活动比较检验
操作姿势 三角肌前束 三角肌中束 肱三头肌长头 平均幅值 降低幅度 t p 平均幅值 降低幅度 t p 平均幅值 降低幅度 t p 常规 穿戴 常规 穿戴 常规 穿戴 跪姿向前 0.044 0.034 22.7% 203.56 0.000 0.028 0.030 -9.8% -70.78 - 0.066 0.053 20.3% 73.46 0.000 跪姿向上 0.051 0.037 27.7% 189.05 0.000 0.032 0.028 11.8% 104.87 0.000 0.070 0.052 25.3% 92.37 0.000 弓步向前 0.048 0.040 23.2% 128.33 0.000 0.026 0.031 -18.9% -107.16 - 0.059 0.070 -17.8% -53.13 - 站立向前 0.042 0.036 17.9% 113.08 0.000 0.027 0.025 7.2% 41.980 0.000 0.068 0.043 37.8% 116.8 0.000 站立向下 0.045 0.034 27.8% 204.71 0.000 0.031 0.022 29.9% 227.11 0.000 0.066 0.046 29.7% 95.71 0.000 注:t值为负,表示在外骨骼辅助操作加剧了被测肌肉活动幅度。  下载: 导出CSV
下载: 导出CSV
表 3 常规操作和外骨骼辅助操作下的前臂肌肉活动比较检验
操作姿势 尺侧腕屈肌 桡侧腕长伸肌 平均幅值 降低幅度 t p 平均幅值 降低幅度 t p 常规 穿戴 常规 穿戴 跪姿向前 0.142 0.128 10.4% 79.21 0.000 0.089 0.095 -7.8% -47.2 - 跪姿向上 0.111 0.136 -22.1% -223.8 - 0.087 0.109 -25.0% -143.3 - 弓步向前 0.105 0.128 -21.7% -132.6 - 0.081 0.104 -28.3% -125.7 - 站立向前 0.103 0.087 15.1% 136.7 0.000 0.085 0.141 -65.5% -232.9 - 站立向下 0.119 0.080 33.2% 311.7 0.000 0.088 0.097 -10.4% -52.5 - 注:t值为负,表示在外骨骼辅助操作加剧了被测肌肉活动幅度。
下载: 导出CSV
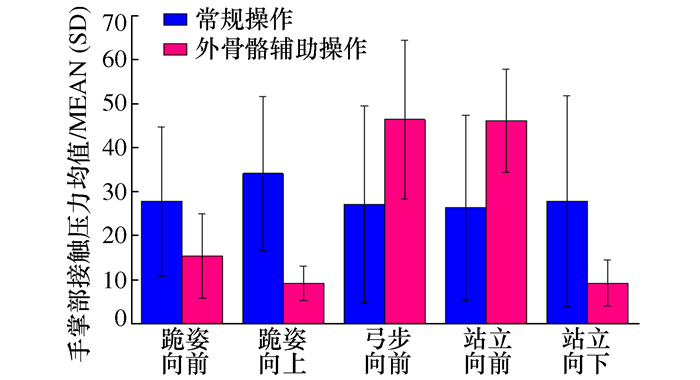
表 4 常规操作和外骨骼辅助操作下手掌接触压力比较检验
操作姿势 手掌接触压力平均值 降低幅度 t p 手掌接触压力最大值 常规操作 外骨骼助力 常规操作 外骨骼助力 跪姿向前 27.719 15.370 44.6% 5.420 0.000 54.850 34.655 跪姿向上 34.106 9.171 67.8% 16.065 0.000 62.434 21.761 弓步向前 27.094 46.390 -34.9% -8.231 0.000 68.858 73.814 站立向前 26.330 46.082 -46.0% -7.345 0.000 71.867 66.692 站立向下 27.777 9.209 69.3% 7.232 0.000 78.690 25.150 注:t值为负,表示在外骨骼辅助操作加剧了手掌接触压力幅度。
下载: 导出CSV
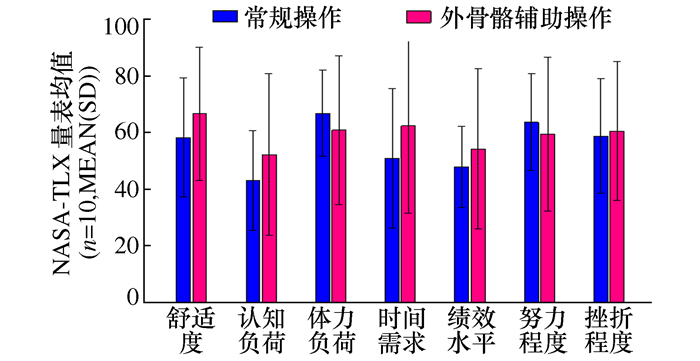
表 5 常规操作和外骨骼辅助操作下主观负荷比较检验
量表 主管负荷均值 t p 常规操作 外骨骼助力 舒适性 58.3 66.7 -0.96 0.36 认知要求 43.2 52.3 -0.83 0.43 体力要求 66.8 60.9 0.69 0.51 时间要求 50.9 62.4 -1.84 0.10 绩效水平 47.9 54.3 -0.69 0.51 努力程度 63.7 59.5 0.58 0.58 受挫程度 58.8 60.6 -0.21 0.84 注:t值为负,表示外骨骼辅助操作增加了人的主观感知负荷。
下载: 导出CSV
-
[1] 朱隽沛, 李怀仙, 王海波, 等.机身装配工人肌肉骨骼损伤调查和人机工效负荷水平研究[J].工业工程, 2018, 21(1):89-95 doi: 10.3969/j.issn.1007-7375.e17-1260Zhu J P, Li H X, Wang H B, et al. A study of the ergonomic load level in the prevalence of work-related musculoskeletal disorders among the plane's fuselage assembly workers[J]. Industrial Engineering Journal, 2018, 21(1):89-95(in Chinese) doi: 10.3969/j.issn.1007-7375.e17-1260 [2] Angela D D, Nussbaum M A. Estimation of forces exerted by the fingers using standardised surface electromyography from the forearm[J]. Ergonomics, 2008, 51(6):858-871 doi: 10.1080/00140130801915980 [3] Cabeças J M, Milho R J. The efforts in the forearm during the use of anti-vibration gloves in simulated work tasks[J]. International Journal of Industrial Ergonomics, 2011, 41(3):289-297 doi: 10.1016/j.ergon.2011.01.013 [4] de Looze M P, Bosch T, Krause F, et al. Exoskeletons for industrial application and their potential effects on physical work load[J]. Ergonomics, 2016, 59(5):671-681 doi: 10.1080/00140139.2015.1081988 [5] Fleming S L, Jansen C W, Hasson S M. Effect of work glove and type of muscle action on grip fatigue[J]. Ergonomics, 1997, 40(6):601-612 doi: 10.1080/001401397187900 [6] Jorgensen M J, Khan K S. Use of tungsten to reduce hand-arm vibration exposure in aircraft manufacturing[J]. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 2008, 52(15):1045-1048 doi: 10.1177/154193120805201510 [7] McDowell T W, Warren C, Xu X S, et al. Laboratory and workplace assessments of rivet bucking bar vibration emissions[J]. The Annals of Occupational Hygiene, 2015, 59(3):382-397 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=2a720083f4e016b8686edecaf7ae9570 [8] Mital A, Kuo T, Faard H F. A quantitative evaluation of gloves used with non-powered hand tools in routine maintenance tasks[J]. Ergonomics, 1994, 37(2):333-343 doi: 10.1080/00140139408963650 [9] Rashedi E, Kim S, Nussbaum M A, et al. Ergonomic evaluation of a wearable assistive device for overhead work[J]. Ergonomics, 2014, 57(12):1864-1874 doi: 10.1080/00140139.2014.952682 [10] Ulrey B L, Fathallah F A. Subject-specific, whole-body models of the stooped posture with a personal weight transfer device[J]. Journal of Electromyography and Kinesiology, 2013, 23(1):206-215 doi: 10.1016/j.jelekin.2012.08.016 [11] Whitfield B H, Costigan P A, Stevenson J M, et al. Effect of an on-body ergonomic aid on oxygen consumption during a repetitive Lifting Task[J]. International Journal of Industrial Ergonomics, 2014, 44(1):39-44 doi: 10.1016/j.ergon.2013.10.002 [12] 范曙远, 王海波, 吴小笛, 等.工业装配外骨骼机械臂承重性能研究[J].工程设计学报, 2018, 25(6):697-702 doi: 10.3785/j.issn.1006-754X.2018.06.011Fang S Y, Wang H B, Wu X D, et al. Research on load-bearing performance of industrial assembly exoskeleton manipulator[J]. Chinese Journal of Engineering Design, 2018, 25(6):697-702(in Chinese) doi: 10.3785/j.issn.1006-754X.2018.06.011 [13] Huysamen K, de Looze M, Bosch T, et al. Assessment of an active industrial exoskeleton to aid dynamic lifting and lowering manual handling tasks[J]. Applied Ergonomics, 2018, 68:125-131 doi: 10.1016/j.apergo.2017.11.004 [14] Theurel J, Desbrosses K, Roux T, et al. Physiological consequences of using an upper limb exoskeleton during manual handling tasks[J]. Applied Ergonomics, 2018, 67:211-217 doi: 10.1016/j.apergo.2017.10.008 [15] Hart S G, Staveland L E. Development of NASA-TLX (task load index):Results of empirical and theoretical research[J]. Advances in Psychology, 1988, 52:139-183 doi: 10.1016/S0166-4115(08)62386-9 -


 点击查看大图
点击查看大图

图(8) / 表(5)
计量
- 文章访问数: 408
- HTML全文浏览量: 143
- PDF下载量: 19
- 被引次数: 0
