




Design and Implementation of Omnidirectional Mobile Logistics Robot with Binocular Vision
-
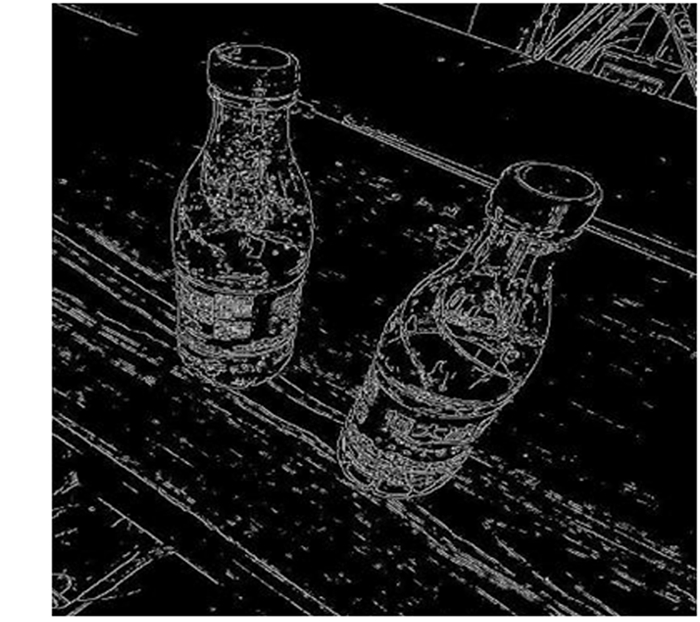
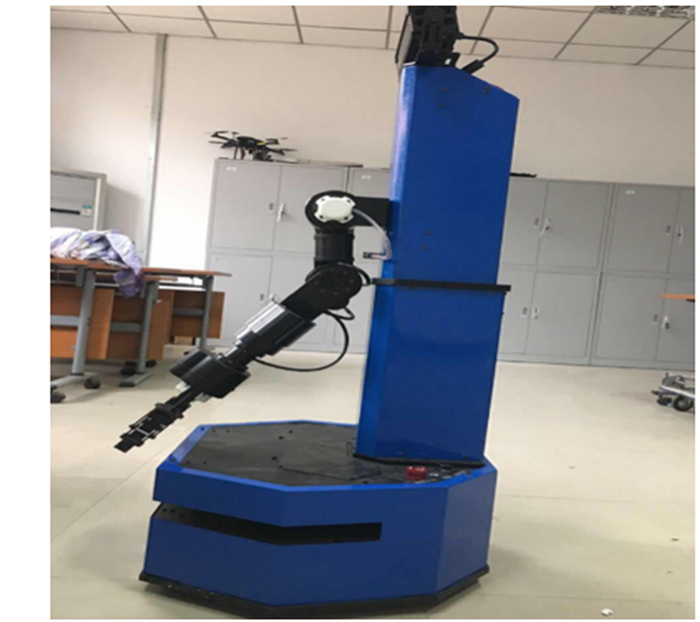
摘要: 为提升物流机器人的灵活性和智能化水平,将全向移动平台、物料抓取机器人、双目视觉识别等技术进行集成应用研究。分析了机器人的结构布局和运动学模型,完成了机械臂的机构原理设计,结合计算机应用视觉识别算法,选择具体的检测方法完成识别对象的角点、边缘及轮廓检测,实现对象的图像处理。通过双目相机成像模型实现坐标系之间的转换,达到定位目标物品的目的。最后,完成了物理样机的开发和实地操作的实验验证。实验结果表明,该系统可以有效地完成物品识别、抓取和搬运工作。Abstract: In order to improve the flexibility and intelligence level of the logistics robot, the integrated application of omnidirectional mobile platform, material grabbing robot and binocular vision recognition technology is developed in this paper. The structure and mathematical models of the robot are analyzed, and the mechanism design of the manipulator is completed. By combining the computer vision recognition algorithm, a specific detection method is selected to complete the detection of the corner, edge and contour of the object and the image processing of the object is realized. Through the binocular camera imaging model, the transformation between coordinate systems can be realized to achieve the goal of locating objects. Finally, the design of the physical prototype is completed, and the practical operation is verified by experiments. The manufacturing and experimental verification of the physical prototype are carried out. The experimental results show that the robot system can effectively identify, grab and transport items.
-
Key words:
- robot /
- computer vision /
- mathematical models /
- identification /
- design /
- experiments
-
[1] 章炜.机器视觉技术发展及其工业应用[J].红外, 2006, 27(2):11-17 doi: 10.3969/j.issn.1672-8785.2006.02.003Zhang W. Development of machine vision and its industrial applications[J]. Infrared, 2006, 27(2):11-17 (in Chinese) doi: 10.3969/j.issn.1672-8785.2006.02.003 [2] 刘曙光, 刘明远, 何钺.机器视觉及其应用[J].河北科技大学学报, 2000, 21(4):11-15, 26 doi: 10.3969/j.issn.1008-1542.2000.04.003Liu S G, Liu M Y, He Y. The machine vision and its application[J]. Journal of Hebei University of Science and Technology, 2000, 21(4):11-15, 26 (in Chinese) doi: 10.3969/j.issn.1008-1542.2000.04.003 [3] 曹成涛, 许伦辉, 赵雪, 等.四轴工业机器人运动控制与视觉码垛[J].机械设计与制造, 2016, (11):158-161 doi: 10.3969/j.issn.1001-3997.2016.11.040Cao C T, Xu L H, Zhao X, et al. Four axis industrial robot motion control and visual palletizing[J]. Machinery Design & Manufacture, 2016, (11):158-161 (in Chinese) doi: 10.3969/j.issn.1001-3997.2016.11.040 [4] 潘峰, 武威, 杨轶璐, 等.视觉定位脑外科手术机器人系统的坐标映射[J].东北大学学报:自然科学版, 2005, 26(5):413-416 doi: 10.3321/j.issn:1005-3026.2005.05.002Pan F, Wu W, Yang Y L, et al. Coordinate mapping of brain surgery robot system based on vision localization[J]. Journal of Northeastern University: Natural Science, 2005, 26(5):413-416 (in Chinese) doi: 10.3321/j.issn:1005-3026.2005.05.002 [5] 胡群芳, 陈永杰.中国掀起月球车研制热[J].中国航天, 2004, (5):8-9 http://d.old.wanfangdata.com.cn/Periodical/zght200405006Hu Q F, Chen Y J. Universities and institutes attracted by lunar rover project[J]. Aerospace China, 2004, (5):8-9 (in Chinese) http://d.old.wanfangdata.com.cn/Periodical/zght200405006 [6] 高庆吉, 洪炳熔, 阮玉峰.基于异构双目视觉的全自主足球机器人导航[J].哈尔滨工业大学学报, 2003, 35(9):1029-1032, 1088 doi: 10.3321/j.issn:0367-6234.2003.09.002Gao Q J, Hong B R, Ruan Y F. Navigation of small-size autonomous soccer robot based on iso-vision system with two cameras[J]. Journal of Harbin Institute of Technology, 2003, 35(9):1029-1032, 1088 (in Chinese) doi: 10.3321/j.issn:0367-6234.2003.09.002 [7] 韩峥, 刘华平, 黄文炳, 等.基于Kinect的机械臂目标抓取[J].智能系统学报, 2013, 8(2):149-155 http://d.old.wanfangdata.com.cn/Periodical/xdkjyc201302008Han Z, Liu H P, Huang W B, et al. Kinect-based object grasping by manipulator[J]. CAAI Transactions on Intelligent Systems, 2013, 8(2):149-155 (in Chinese) http://d.old.wanfangdata.com.cn/Periodical/xdkjyc201302008 [8] Müller J, Frese U, Röfer T. Grab a mug-object detection and grasp motion planning with the Nao robot[C]//2012 IEEE-RAS International Conference on Humanoid Robots. Osaka, Japan: IEEE, 2012: 349-356 [9] Gienger M, Toussaint M, Goerick C. Whole-body motion planning-building blocks for intelligent systems[M]//Harada K, Yoshida E, Yokoi K. Motion Planning for Humanoid Robots. London: Springer, 2010: 67-98 [10] Chaumette F, Malis E. 2 1/2 D Visual servoing: a possible solution to improve image-based and position-based visual servoings[C]//IEEE International Conference on Robotics and Automation. San Francisco, CA: IEEE, 2000: 630-635 [11] 赵文彬, 张艳宁.角点检测技术综述[J].计算机应用研究, 2006, 23(10):17-19, 38 doi: 10.3969/j.issn.1001-3695.2006.10.006Zhao W B, Zhang Y N. Survey on corner detection[J]. Application Research of Computers, 2006, 23(10):17-19, 38 (in Chinese) doi: 10.3969/j.issn.1001-3695.2006.10.006 [12] 魏伟波, 芮筱亭.图像边缘检测方法研究[J].计算机工程与应用, 2006, 42(30):88-91 doi: 10.3321/j.issn:1002-8331.2006.30.025Wei W B, Rui X T. Study on edge detection method[J]. Computer Engineering and Applications, 2006, 42(30):88-91 (in Chinese) doi: 10.3321/j.issn:1002-8331.2006.30.025 [13] Bradski G. The openCV library[J]. Dr. Dobb's Journal of Software Tools, 2000, 25(11):120-126 http://d.old.wanfangdata.com.cn/Periodical/wtyht201205026 [14] Davison A J, Reid I D, Molton N D, et al. MonoSLAM: Real-time single camera SLAM[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6):1052-1067 doi: 10.1109/TPAMI.2007.1049 [15] 李海洋, 李洪波, 林颖, 等.基于Kinect的SLAM方法[J].中南大学学报:自然科学版, 2013, 44(S2):28-32 http://d.old.wanfangdata.com.cn/Conference/8129030Li H Y, Li H B, Lin Y, et al. Method of SLAM with Kinect[J]. Journal of Central South University: Science and Technology, 2013, 44(S2):28-32 (in Chinese) http://d.old.wanfangdata.com.cn/Conference/8129030 -

 下载:
下载:






 点击查看大图
点击查看大图

图(9)
计量
- 文章访问数: 526
- HTML全文浏览量: 115
- PDF下载量: 36
- 被引次数: 0
