




Error Precompensation Algorithm and Experiment for Dual-drive Synchronous Control System
-
摘要: 针对双驱进给系统的同步控制,设计了一种新的补偿算法。首先,根据双丝杠工作台的结合部刚度,建立滚珠丝杠运动系统的动力学模型。然后在不同进给速度和工作台位置下,对双驱进给的同步误差进行检测,得到同步误差的多元线性回归模型,利用动力学模型与多元线性回归模型可综合得出双驱同步控制的误差预补偿模型。采用自主研发的双驱进给试验平台进行双驱进给的补偿试验,对比传统的虚拟主轴同步控制策略、主从同步控制策略与本文所提出的误差预补偿控制策略,对双驱进给的速度跟随精度与位置同步精度进行对比分析,试验结果表明,双驱同步控制的误差预补偿策略具有同步精度更高,稳定性更好的优点。Abstract: For the synchronous control problems in dual-drive feeding system, a new error compensation algorithm was designed in this paper. First, a dynamical model of double-nut ball screw system was established according to the joint stiffness of twin-screw. Then detection results of dual-drive feed synchronization error at different feed rates and displacements were used to get multiple linear regression models of dual-drive synchronization error, and further establishing dual-drive synchronous control error pre-compensation model by dynamic model and multiple linear regression models. Dual-drive feed experiments were made by self-developed dual-drive experimental platform. The impacts on dual-drive speed accuracy and synchronization accuracy of the traditional virtual spindle synchronization control method, master-slave synchronization control method and dual-drive synchronous control method with error pre-compensation were compared. Results show that the dual-drive synchronous feeding control method with error pre-compensation has the advantages of high synchronization, high running precision and good stability.
-
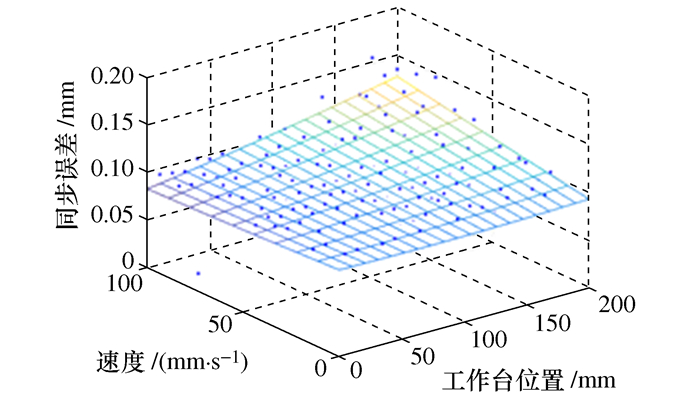
表 1 双滚珠丝杠位置差
工作台位置/mm 双驱进给速度/(mm·s-1) 10 20 30 40 50 60 70 80 90 100 10 0.085 0.089 0.085 0.095 0.087 0.083 0.098 0.090 0.091 0.094 20 0.090 0.091 0.093 0.089 0.092 0.095 0.096 0.095 0.099 0.092 30 0.091 0.085 0.092 0.092 0.089 0.088 0.090 0.094 0.096 0.090 40 0.084 0.084 0.087 0.098 0.093 0.096 0.083 0.098 0.089 0.100 50 0.090 0.076 0.093 0.104 0.092 0.089 0.091 0.086 0.094 0.096 60 0.092 0.079 0.098 0.096 0.089 0.094 0.103 0.104 0.097 0.098 70 0.086 0.075 0.086 0.085 0.098 0.097 0.094 0.098 0.094 0.093 80 0.093 0.089 0.093 0.097 0.097 0.095 0.092 0.096 0.099 0.096 90 0.087 0.090 0.094 0.093 0.094 0.095 0.104 0.099 0.104 0.105 100 0.083 0.094 0.093 0.093 0.098 0.097 0.099 0.093 0.096 0.098 110 0.095 0.105 0.099 0.099 0.106 0.103 0.123 0.102 0.107 0.106 120 0.105 0.098 0.094 0.096 0.094 0.099 0.121 0.103 0.094 0.094 130 0.100 0.086 0.096 0.098 0.099 0.102 0.098 0.098 0.116 0.099 140 0.091 0.081 0.103 0.101 0.100 0.096 0.099 0.115 0.105 0.129 150 0.103 0.089 0.097 0.099 0.095 0.105 0.118 0.101 0.098 0.099 160 0.091 0.099 0.097 0.103 0.118 0.098 0.109 0.122 0.132 0.103 170 0.105 0.091 0.109 0.098 0.097 0.116 0.130 0.098 0.117 0.121 180 0.095 0.120 0.099 0.102 0.107 0.103 0.098 0.104 0.098 0.156 190 0.085 0.098 0.112 0.115 0.098 0.096 0.114 0.120 0.126 0.134 200 0.090 0.103 0.100 0.097 0.105 0.121 0.122 0.147 0.141 0.137  下载: 导出CSV
下载: 导出CSV
表 2 3种同步控制策略实验结果
控制方式 同步误差/mm 实际位移/mm 速度方差 虚拟主轴 0.045 39.498 1.117 主从同步 0.041 39.403 0.919 误差预补偿 0.019 39.882 0.376
下载: 导出CSV
-
[1] Zhang G, Wu J H, Liu P K, et al. Dynamic analysis and model-based feed forward control of a 2-DoF translational parallel manipulator driven by linear motors[J]. Industrial Robot, 2013, 40(6):597-609 doi: 10.1108/IR-01-2013-307 [2] 王太勇, 乔志峰, 韩志国, 等.高档数控装备的发展趋势[J].中国机械工程, 2011, 22(10):1247-1252, 1259 http://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZGSC200903001005.htmWang T Y, Qiao Z F, Han Z G, et al. Development trends of high-end NC equipment[J]. China Mechanical Engineering, 2011, 22(10):1247-1252, 1259(in Chinese) http://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZGSC200903001005.htm [3] 杨叔子, 丁汉, 李斌.高端制造装备关键技术的科学问题[J].机械制造与自动化, 2011, 40(1):1-5 doi: 10.3969/j.issn.1671-5276.2011.01.001Yang S Z, Ding H, Li B. Scientific problems originated from key techniques of advanced manufacturing equipments[J]. Machine Building and Automation, 2011, 40(1):1-5(in Chinese) doi: 10.3969/j.issn.1671-5276.2011.01.001 [4] 张泰华.西门子Sinumerik 840D的调整[J].制造技术与机床, 2002, (6):28-29 doi: 10.3969/j.issn.1005-2402.2002.06.013Zhang T H. How to commission sinumerik 840D[J]. Manufacturing Technology and Machine Tool, 2002, (6):28-29(in Chinese) doi: 10.3969/j.issn.1005-2402.2002.06.013 [5] 李金龙, 孙永超.SINUMERIK 828D数控系统实现双柱立车双刀架同时加工[J].制造技术与机床, 2015, (3):158-160 doi: 10.3969/j.issn.1005-2402.2015.03.048Li J L, Sun Y C. SINUMERIK 828D CNC system accomplishs double column vertical turning machine with two head working concurrently[J]. Manufacturing Technology and Machine Tools, 2015, (3):158-160(in Chinese) doi: 10.3969/j.issn.1005-2402.2015.03.048 [6] NUM 1060-7 Duplicate and synchronized axes. En-938875/0 [7] GE Fanuc Automation Series 150i/15i-model a connection manual. GE Fanuc Automation North America. October 2000 [8] 陈海森, 张德新, 王继河, 等.基于H∞交叉耦合算法的双驱同步控制[J].浙江大学学报:工学版, 2017, 51(1):131-137 http://d.old.wanfangdata.com.cn/Periodical/zjdxxb-gx201701016Chen H S, Zhang D X, Wang J H, et al. Dual-drive synchronous control with large payload based on cross-coupled algorithm[J]. Journal of Zhejiang University:Engineering Science, 2017, 51(1):131-137(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/zjdxxb-gx201701016 [9] 武志鹏, 陈兴林, 王英红.光刻机主从滑模同步控制系统设计[J].电光与控制, 2011, 18(11):84-87 doi: 10.3969/j.issn.1671-637X.2011.11.020Wu Z P, Chen X L, Wang Y H.et al Design of a master-slave sliding mode synchronization control system for lithography[J]. Electro-Optic & Control, 2011, 18(11):84-87(in Chinese) doi: 10.3969/j.issn.1671-637X.2011.11.020 [10] 王少炜, 耿强, 周湛清.快速跟随型主从结构多电机同步控制[J].新型工业化, 2017, 7(10):32-38 http://d.old.wanfangdata.com.cn/Periodical/xxgyh201710005Wang S W, Geng Q, Zhou Z Q. Multi motor synchronous control with fast following master slave structure[J]. The Journal of New Industrialization, 2017, 7(10):32-38(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/xxgyh201710005 [11] Chen S L, Nam D H, Thanh N V. Synchronous controller for dual servo motor in servo press[J]. Applied Mechanics and Materials, 2014, 494-495:1175-1181 doi: 10.4028/www.scientific.net/AMM.494-495 [12] Kwon O S, Choe S H, Heo H. A study on the dual-servo system using improved cross-coupling control method[C]//201110th International Conference on Environment and Electrical Engineering. Rome, Italy: IEEE, 2011: 1-4 [13] Brewe D E, Hamrock B J. Simplified solution for elliptical-contact deformation between two elastic solids[J]. Journal of Lubrication Technology, 1977, 99(4):485-487 doi: 10.1115/1.3453245 [14] 朱坚民, 张统超, 李孝茹.基于结合部刚度特性的滚珠丝杠进给系统动态特性分析[J].机械工程学报, 2015, 51(17):72-82 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201517010Zhu J M, Zhang T C, Li X R. Dynamic characteristic analysis of ball screw feed system based on stiffness characteristic of mechanical joint[J]. Chinese Journal of Mechanical Engineering, 2015, 51(17):72-82(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201517010 [15] 赵万华, 张俊, 李雪林, 等.基于统计模型的动梁式龙门机床双驱进给误差补偿方法及模型: 中国, 201510125414.1[P].2015-03-20Zhao W H, Zhang J, Li X L, et al. Statistical model-based moving beam type gantry type machine tool dual-drive feed error compensation method and modeld error compensation method and model for moving beam type gantry machine toolbased on statistical model: CN, 201510125414.1[P]. 2015-03-20(in Chinese) -



 点击查看大图
点击查看大图

图(13) / 表(2)
计量
- 文章访问数: 982
- HTML全文浏览量: 478
- PDF下载量: 80
- 被引次数: 0
