




Flexibility Optimization of Five-DOF Manipulator for Explosive Ordnance Disposal Robot
-
摘要: 针对传统机器人操作臂灵活度优化方法忽略了获取机器人雅克比矩阵奇异值,导致操作臂灵活度过程效率降低,排爆准确度得不到明显提高。提出排爆机器人五自由度操作臂灵活度优化方法。首先对操作臂构造动力学模型,获取拉格朗日动力学方程及相关参数,对姿态概率系数和可操作度进行描述。以五自由度操作臂工作球为基础分析操作臂姿态概率系数;针对操作臂的可操作度,通过排爆机器人雅克比矩阵奇异值实现构造,建立操作臂在工作空间内的灵活度优化目标函数,通过遗传算法对目标函数进行求解,实现排爆机器人操作臂灵活度的优化。实验结果表明,所提方法优化性能佳,可有效提高操作臂灵活度。Abstract: The traditional robot manipulator flexibility optimization method ignores the acquisition of the singular value of the Jacobi matrix, which reduces the efficiency of the manipulator's flexibility and the accuracy of the explosion. The flexibility optimization method of five-DOF manipulator is put forward. First, the dynamic model of the manipulator is constructed, and the Lagrange dynamic equation and relevant parameters are obtained, and the probability coefficient and operability of the attitude are described. Based on the working ball of five degrees of freedom manipulator, the attitude probability coefficient of the manipulator is analyzed. According to the operability of the manipulator, the bizarre value of Jacobian matrix is constructed, the flexibility of the manipulator is optimized in the working space, and the target function is solved by the genetic algorithm. The experimental results show that the proposed method has better performance and can effectively improve the flexibility of the manipulator.
-
Key words:
- explosive ordnance disposal robot /
- five degrees of freedom /
- manipulator /
- flexibility /
- optimization
-
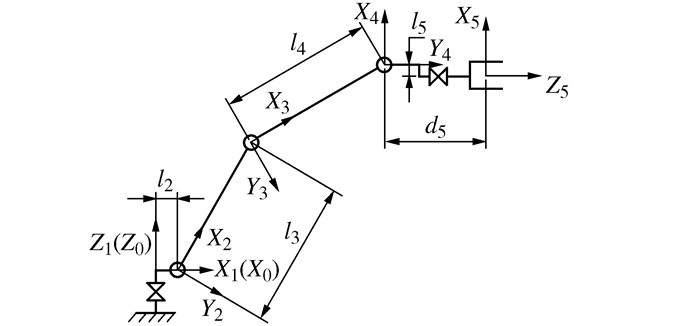
表 1 各杆臂参数
编号 li αi di θi 1 0 0 0 [-90°, 90°] 2 14.5 mm -90° 0 [-180°, 0°] 3 451.0 mm 0 0 [0°, 160°] 4 470.0 mm 0 0 [-180°, 60°] 5 -15.0 mm -90° 225 mm [-90°, 90°]  下载: 导出CSV
下载: 导出CSV
-
[1] 贾世元, 贾英宏, 徐世杰.基于姿态可操作度的机械臂尺寸优化方法[J].北京航空航天大学学报, 2015, 41(9):1693-1700 http://d.old.wanfangdata.com.cn/Periodical/bjhkhtdxxb201509019Jia S Y, Jia Y H, Xu S J. Dimensional optimization method for manipulator based on orientation manipulability[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(9):1693-1700(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/bjhkhtdxxb201509019 [2] 刘亚军, 徐新喜, 黄田.生物检测机器人操作臂工作空间分析与尺度优化[J].机械工程学报, 2015, 51(3):51-57 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201503008Liu Y J, Xu X X, Huang T. Workspace topologies and dimensional synthesis for biological detection manipulator[J]. Journal of Mechanical Engineering, 2015, 51(3):51-57(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201503008 [3] 李宪华, 盛蕊, 张雷刚, 等.六自由度模块化机器人手臂奇异构型分析[J].农业机械学报, 2017, 48(7):376-382 http://d.old.wanfangdata.com.cn/Periodical/nyjxxb201707048Li X H, Sheng R, Zhang L G, et al. Singular configuration analysis of 6-DOF modular manipulator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(7):376-382(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/nyjxxb201707048 [4] 张博, 梁斌, 王学谦, 等.双臂空间机器人可操作度分析及其构型优化[J].宇航学报, 2016, 37(10):1207-1214 doi: 10.3873/j.issn.1000-1328.2016.10.008Zhang B, Liang B, Wang X Q, et al. Manipulability measure of a dual-arm space robot and its application to configuration optimization[J]. Journal of Astronautics, 2016, 37(10):1207-1214(in Chinese) doi: 10.3873/j.issn.1000-1328.2016.10.008 [5] 王美玲, 骆敏舟.一种冗余自由度双臂机器人协调控制器设计[J].系统仿真学报, 2016, 28(8):1783-1789 http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201608011Wang M L, Luo M Z. Cooperative controller design for redundant dual arm robot[J]. Journal of System Simulation, 2016, 28(8):1783-1789(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201608011 [6] 王琥, 胡立坤, 谭颖.PSO优化的六自由度机械臂全局快速终端滑模控制[J].智能系统学报, 2017, 12(2):266-271 http://d.old.wanfangdata.com.cn/Periodical/xdkjyc201702021Wang H, Hu L K, Tan Y. A PSO-based global fast terminal sliding mode controllerfor 6-DOF manipulators[J]. CAAI Transactions on Intelligent Systems, 2017, 12(2):266-271(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/xdkjyc201702021 [7] Sun C Y, He W, Hong J. Neural network control of a flexible robotic manipulator using the lumped spring-mass model[J]. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2017, 47(8):1863-1874 doi: 10.1109/TSMC.2016.2562506 [8] 张曙光, 沈霖.自由度下的水下机器人控制器抗干扰设计[J].电子设计工程, 2017, 25(1):143-147 http://d.old.wanfangdata.com.cn/Periodical/dzsjgc201701036Zhang S G, Shen L. Underwater robot controller design based on wireless sensor network[J]. Electronic Design Engineering, 2017, 25(1):143-147(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/dzsjgc201701036 [9] 张云峰, 马振书, 孙华刚, 等.一种基于混合策略的排爆机器人目标抓取轨迹规划[J].机床与液压, 2015, 43(21):86-90 doi: 10.3969/j.issn.1001-3881.2015.21.020Zhang Y F, Ma Z S, Sun H G, et al. Target capture trajectory planning of EOD robot based on hybrid strategy[J]. Machine Tool & Hydraulics, 2015, 43(21):86-90(in Chinese) doi: 10.3969/j.issn.1001-3881.2015.21.020 [10] 丰焕亭.机器人手臂自动控制的优化设计与仿真[J].计算机仿真, 2016, 33(3):264-267 doi: 10.3969/j.issn.1006-9348.2016.03.058Feng H T. Optimization design and simulation of automatic control for robot arm[J]. Computer Simulation, 2016, 33(3):264-267(in Chinese) doi: 10.3969/j.issn.1006-9348.2016.03.058 [11] 邱焕能, 林仕高, 欧元贤.机器人操作臂离线编程仿真系统[J].机床与液压, 2015, 43(21):28-31 doi: 10.3969/j.issn.1001-3881.2015.21.006Qiu H N, Lin S G, Ou Y X. Off-line programming simulation system of robotic manipulators[J]. Machine Tool & Hydraulics, 2015, 43(21):28-31(in Chinese) doi: 10.3969/j.issn.1001-3881.2015.21.006 [12] Halim D, Luo X, Trivailo P M. Decentralized vibration control of a multi-link flexible robotic manipulator using smart piezoelectric transducers[J]. Acta Astronautica, 2014, 104(1):186-196 doi: 10.1016/j.actaastro.2014.07.016 [13] 权龙哲, 彭涛, 沈柳杨, 等.立体苗盘管理机器人的机械臂参数优化与试验[J].农业工程学报, 2017, 33(7):10-19 http://d.old.wanfangdata.com.cn/Periodical/nygcxb201707002Quan L Z, Peng T, Shen L Y, et al. Parameter optimization and experiment of manipulator for three-dimensional seedling tray management robot[J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(7):10-19(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/nygcxb201707002 [14] 张永贵, 刘文洲, 高金刚, 等.任务空间上的机器人灵活性评价方法[J].兰州理工大学学报, 2015, 41(1):37-41 doi: 10.3969/j.issn.1673-5196.2015.01.009Zhang Y G, Liu W Z, Gao J G, et al. Assessment of robot flexibility in task space[J]. Journal of Lanzhou University of Technology, 2015, 41(1):37-41(in Chinese) doi: 10.3969/j.issn.1673-5196.2015.01.009 [15] 刘哲, 李铁军.七自由度打磨机器人操作臂运动学分析[J].自动化技术与应用, 2016, 35(4):60-64 http://d.old.wanfangdata.com.cn/Periodical/hljzdhjsyyy201604015Liu Z, Li T J. Kinematics analysis of polishing robot manipulator with seven degrees of freedom[J]. Techniques of Automation and Applications, 2016, 35(4):60-64(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hljzdhjsyyy201604015 -



 点击查看大图
点击查看大图

图(6) / 表(1)
计量
- 文章访问数: 645
- HTML全文浏览量: 158
- PDF下载量: 393
- 被引次数: 0
