




Analysis of Mechanics and Power Consumption of Wall-climbing Robot with Permanent Magnet Adsorption Wheel
-
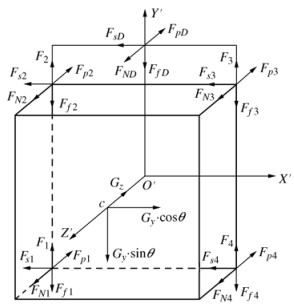
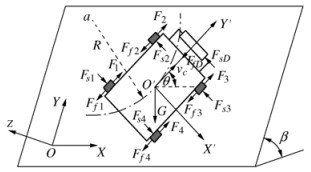
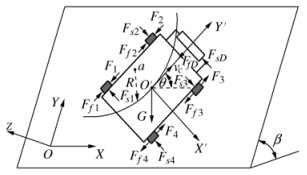
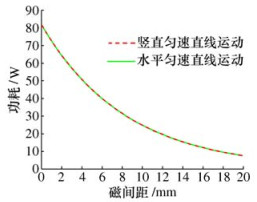
摘要: 为从减少大型原油储罐检测分区和节约功耗的角度合理规划爬壁机器人运动方式和路径,对大型原油储罐缺陷检测爬壁机器人在垂直壁面运动的受力和功耗问题进行研究。首先对机器人匀速直线运动和转向运动进行受力分析,得出机器人在竖直直线运动、水平直线运动、大半径转向运动以及小半径转向运动时的受力和功率消耗情况;通过仿真分别对比分析两种匀速直线运动和两种转向运动的功率消耗情况;搭建爬壁机器人样机实验平台,进行功耗验证实验;仿真和实验一致得出竖直直线运动的功耗小于水平直线运动,大半径转向功耗小于小半径转向的结论。Abstract: To rationally plan the movement and path of wall-climbing robots from the perspective of reducing the detection zone and saving power consumption of large-scale crude oil storage tanks. The study on the force and power consumption of the wall-climbing robot in the vertical wall movement for the defect detection of large-scale crude oil storage tanks. Firstly, the forces of the uniform linear motion and the steering motion of the robot are respectively analyzed, and the force and power consumption of the robot in the vertical straight motion, horizontal linear motion, large radius steering motion and small radius steering motion are obtained; the power consumption of two uniform linear motions and two kinds of steering motions are analyzed; a prototype experimental platform for climbing wall robots, and verify the power consumption is built; the simulation and experiment show that the power consumption of vertical straight line motion is less than the horizontal straight line motion, and the large radius steering power consumption is less than the small radius steering conclusion.
-
Key words:
- wall-climbing robot /
- power consumption /
- force analysis
-
表 1 机器人竖直匀速直线运动测试数据
磁间距/mm 16 14 12 10 运动方向 上升 下降 上升 下降 上升 下降 上升 下降 滑移距离/mm 12 10 6 7 4 3 2 3 平均电流/A 0.93 0.43 1.19 0.59 1.23 0.71 1.44 0.88 竖直运动电流/A 0.68 0.89 0.97 1.16 功率/W 14.69 19.22 20.95 25.06  下载: 导出CSV
下载: 导出CSV
表 2 机器人水平匀速直线运动测试数据
磁间距/mm 16 14 12 10 8 6 4 运动方向 水平向左 水平向左 水平向左 水平向左 水平向左 水平向左 水平向左 滑移距离/mm 35 27 20 14 9 6 3 平均电流/A 0.68 0.86 0.98 1.14 1.49 1.77 2.37 功率/W 14.69 18.58 21.17 24.62 32.18 38.23 51.19
下载: 导出CSV
表 3 机器人大半径转弯运动测试数据
实验次数 1 2 3 4 5 6 滑移距离/cm 13.3 13.6 13.8 14.2 12.8 13.5 电流/A 1.28 1.31 1.30 1.26 1.29 1.31 平均电流/A 1.29 功率/W 27.86
下载: 导出CSV
表 4 机器人小半径转弯运动测试数据
实验次数 1 2 3 4 5 6 滑移距离/cm 13.6 13.2 12.5 13.7 12.1 12.3 电流/A 2.99 3.08 3.12 3.15 3.06 3.10 平均电流/A 3.08 功率/W 66.53
下载: 导出CSV
-
[1] 桂仲成, 陈强, 孙振国, 等.爬壁机器人的轮式移动机构的转向功耗[J].清华大学学报:自然科学版, 2008, 48(2):161-164, 168 http://d.old.wanfangdata.com.cn/Periodical/qhdxxb200802002Gui Z C, Chen Q, Sun Z G, et al. Turning power losses in the wheeled locomotion mechanism for a wall climbing robot[J]. Journal of Tsinghua University:Science & Technology, 2008, 48(2):161-164, 168(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/qhdxxb200802002 [2] Chu B, Jung K, Han C S, et al. A survey of climbing robots:Locomotion and adhesion[J]. International Journal of Precision Engineering and Manufacturing, 2010, 11(4):633-647 doi: 10.1007/s12541-010-0075-3 [3] 董伟光, 王洪光, 姜勇.一种轮足复合式爬壁机器人动力学建模与分析[J].机器人, 2015, 37(3):264-270 http://d.old.wanfangdata.com.cn/Periodical/jqr201503002Dong W G, Wang H G, Jiang Y. Dynamics modeling and analysis of a wall-climbing robot with biped-wheel hybrid locomotion mechanism[J]. Robot, 2015, 37(3):264-270(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jqr201503002 [4] 陈勇, 王昌明, 包建东.新型爬壁机器人磁吸附单元优化设计[J].兵工学报, 2012, 33(12):1539-1544 http://d.old.wanfangdata.com.cn/Periodical/bgxb201212022Chen Y, Wang C M, Bao J D. Optimization of a novel magnetic adsorption unit for wall-climbing robot[J]. Acta Armamentarii, 2012, 33(12):1539-1544(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/bgxb201212022 [5] Balaguer C, Virk G, Armada M. Robot applications against gravity[J]. IEEE Robotics & Automation Magazine, 2006, 13(1):5-6 http://cn.bing.com/academic/profile?id=d92591feef02c9fc59a2b04d7f278f25&encoded=0&v=paper_preview&mkt=zh-cn [6] Woo C K, Choi H D, Yoon S, et al. Optimal design of a new wheeled mobile robot based on a kinetic analysis of the stair climbing states[J]. Journal of Intelligent and Robotic Systems, 2007, 49(4):325-354 doi: 10.1007/s10846-007-9139-8 [7] 李志海, 付宜利, 王树国.四轮驱动滑动吸盘爬壁机器人的动力学研究[J].机器人, 2010, 32(5):601-607 http://d.old.wanfangdata.com.cn/Periodical/jqr201005004Li Z H, Fu Y L, Wang S G. Dynamic analysis on four-wheel driving wall-climbing robot with sliding suction cups[J]. Robot, 2010, 32(5):601-607(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jqr201005004 [8] 熊雕, 刘玉良.履带式爬壁机器人受力分析与稳定性仿真研究[J].机电工程, 2015, 32(7):929-932, 937 http://d.old.wanfangdata.com.cn/Periodical/jdgc201507008Xiong D, Liu Y L. Force analysis and stability simulation on tracked wall-climbing robot[J]. Journal of Mechanical & Electrical Engineering, 2015, 32(7):929-932, 937(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jdgc201507008 [9] 闻靖, 顿向明, 缪松华, 等.变磁力吸附爬壁机器人的结构设计与爬越焊缝特性[J].机器人, 2011, 33(4):405-410, 501 http://d.old.wanfangdata.com.cn/Periodical/jqr201104003Wen J, Dun X M, Miao S H, et al. Structure design and weld seam surmounting characteristic of a wall-climbing robot with variable magnetic adsorption force device[J]. Robot, 2011, 33(4):405-410, 501(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jqr201104003 [10] 付宜利, 李志海.爬壁机器人的研究进展[J].机械设计, 2008, 25(4):1-5 http://d.old.wanfangdata.com.cn/Periodical/jxsj200804001Fu Y L, Li Z H. Researching headway of wall-climbing robots[J]. Journal of Machine Design, 2008, 25(4):1-5(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxsj200804001 [11] 徐泽亮, 马培荪.永磁吸附履带式爬壁机器人转向运动灵活性分析[J].上海交通大学学报, 2003, 37(11):58-61, 65 http://d.old.wanfangdata.com.cn/Periodical/shjtdxxb2003z1013Xu Z L, Ma P S. Analysis of permanent magnetic tracked wall-climbing robot's turning agile capability[J]. Journal of Shanghai Jiaotong University, 2003, 37(11):58-61, 65(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/shjtdxxb2003z1013 [12] 刘淑华, 夏菁, 孙学敏, 等.已知环境下一种高效全覆盖路径规划算法[J].东北师大学报:自然科学, 2011, 43(4):39-43 http://d.old.wanfangdata.com.cn/Periodical/dbsdxb201104007Liu S H, Xia J, Sun X M, et al. An efficient complete coverage path planning in known environments[J]. Journal of Northeast Normal University:Natural Science Edition, 2011, 43(4):39-43(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/dbsdxb201104007 [13] Hu G Q, Hu Z W, Wang H B. Complete coverage path planning for road cleaning robot[C]//2010 International Conference on Networking, Sensing and Control. Chicago, IL, USA: IEEE, 2010: 643-648 https://www.researchgate.net/publication/221283777_Complete_coverage_path_planning_for_road_cleaning_robot [14] Michel D, McIsaac K. New path planning scheme for complete coverage of mapped areas by single and multiple robots[C]//2010 IEEE International Conference on Mechatronics and Automation. Chengdu: IEEE, 2012: 1233-1240 https://www.researchgate.net/publication/261263650_New_path_planning_scheme_for_complete_coverage_of_mapped_areas_by_single_and_multiple_robots [15] Deng Y, Yang G W, Cui X M, et al. Application of improved back propagation neural network in mowing robot's path planning[J]. Applied Mechanics and Materials, 2014, 602-605:916-919 doi: 10.4028/www.scientific.net/AMM.602-605 -







 点击查看大图
点击查看大图
图(13) / 表(4)
计量
- 文章访问数: 777
- HTML全文浏览量: 176
- PDF下载量: 240
- 被引次数: 0
