




Model Error Compensation of Double-fading Kalman Filtering to Rectangular Board of Six-axis Force Sensors
-
摘要: 六维力传感器能够通过应变片及板梁结构实时检测空间六方向的力信息,但其输出信号不可避免地被噪声干扰所污染。为改善这一现象,同时针对过程噪声模型不精准致使经典卡尔曼滤波器性能差的问题,设计了一种双因子渐消卡尔曼滤波器。算法研究了加性噪声信号的统计特性,建立了矩形板主振型增广状态方程,分析了两种过程噪声模型偏差对滤波性能的影响。在经典卡尔曼滤波器的基础上,基于新息正交性原理,依据Sage开窗估计原理与最小二乘准则,构造了双渐消因子的解析式,阐述了滤波器的工作原理。研究表明:双渐消卡尔曼滤波器稳定性强,能够有效削弱噪声模型偏差的影响;对比抗差卡尔曼滤波器,精度提升38.66%。Abstract: The six-axis force sensors can detect spatial force information in six directions in real time through the strain gauge and plate girder structure, but the output signal is inevitably polluted by the noise signal. In order to improve this phenomenon, a kind of double-fading factors Kalman filter is designed for the problem of poor performance of the standard Kalman filter due to the inaccuracy of the acoustic noise model. The statistical properties of the additive noise signal are studied in this algorithm. The augmented state equation of the principal mode shape of the rectangular plate is established. The influence of the two acoustic noise model deviations on the filter performance is analyzed. Based on the standard Kalman filter and the theory of orthogonality of innovation, according to the Sage window estimation principle and the least squares criterion, the analytic formula of the double-fading factors are constructed. The working principle of filter is described. The simulation results indicate that the proposed algorithm has better stability comparing with robust Kalman filter; it can effectively reduce the effect of model errors come from noise and improve filtering precision to 38.66 percent.
-
表 3 四枚应变片中心位置信息
应变片编号 X/mm Y/mm Z/mm 1 16.35 0 -0.75 2 16.35 0 0.75 3 3.65 0 0.75 4 3.65 0 -0.75  下载: 导出CSV
下载: 导出CSV
表 4 固有频率与振型函数
固有频率/Hz 简化振型函数 19 542 W1=0.999 6sin(157x)2 33 856 W2=0.999 8sin(157x)sin(314x) 51 403 W3=0.991 0sin(157x)2 (1-250y)+0.133 9sin(157x)sin(471x)(1-250y)
下载: 导出CSV
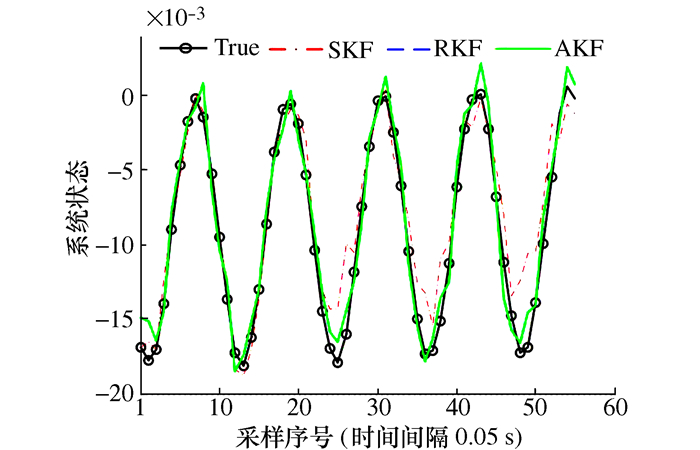
表 5 滤波前期算法性能比较
滤波算法 RMSE 精度提升 SKF 0.001 487 7 / RKF 0.000 938 1 36.94% AKF 0.000 938 1 36.94%
下载: 导出CSV
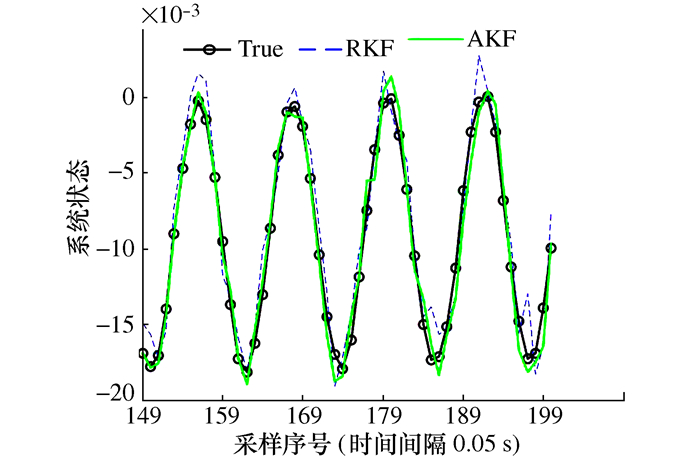
表 6 滤波中期算法性能比较
滤波算法 RMSE 精度提升 SKF 0.002 070 5 / RKF 0.000 942 2 54.49% AKF 0.000 9422 54.49%
下载: 导出CSV
-
[1] 汪志红.电阻应变片式六维力传感器弹性体力学特性的研究[D].安徽芜湖: 安徽工程大学, 2013 http://cdmd.cnki.com.cn/Article/CDMD-10363-1014155700.htmWang Z H. Research on mechanical properties of the elastic body of a six-axis force sensor based on strain gauge[D]. Anhui Wuhu: Anhui Polytechnic University, 2013(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10363-1014155700.htm [2] Chang G B, Liu M. M-estimator-based robust Kalman filter for systems with process modeling errors and rank deficient measurement models[J]. Nonlinear Dynamics, 2015, 80(3):1431-1449 doi: 10.1007/s11071-015-1953-0 [3] Hajiyev C, Soken H E. Robust adaptive Kalman filter for estimation of UAV dynamics in the presence of sensor/actuator faults[J]. Aerospace Science and Technology, 2013, 28(1):376-383 [4] 周启帆, 张海, 王嫣然.一种基于冗余测量的自适应卡尔曼滤波算法[J].航空学报, 2015, 36(5):1596-1605 http://d.old.wanfangdata.com.cn/Periodical/hkxb201505023Zhou Q F, Zhang H, Wang Y R. A redundant measurement adaptive Kalman filter algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(5):1596-1605(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hkxb201505023 [5] Chang G B, Liu M. An adaptive fading Kalman filter based on Mahalanobis distance[J]. Proceedings of the Institution of Mechanical Engineers, Part G:Journal of Aerospace Engineering, 2015, 229(6):1114-1123 doi: 10.1177/0954410014545181 [6] 朱枫, 张葆, 李贤涛, 等.基于强跟踪卡尔曼滤波的陀螺信号处理[J].吉林大学学报:工学版, 2017, 47(6):1868-1875 http://d.old.wanfangdata.com.cn/Periodical/jlgydxzrkxxb201706027Zhu F, Zhang B, Li X T, et al. Gyro signal processing based on strong tracking Kalman filter[J]. Journal of Jilin University:Engineering and Technology Edition, 2017, 47(6):1868-1875(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jlgydxzrkxxb201706027 [7] 宋康宁, 丛爽, 邓科, 等.自适应强跟踪卡尔曼滤波在陀螺稳定平台中的应用[J].中国科学技术大学学报, 2015, 45(1):17-22 doi: 10.3969/j.issn.0253-2778.2015.01.003Song K N, Cong S, Deng K, et al. Application of adaptive strong tracking Kalman filter to gyro-stabilized platform[J]. Journal of University of Science and Technology of China, 2015, 45(1):17-22(in Chinese) doi: 10.3969/j.issn.0253-2778.2015.01.003 [8] Gao W, Li J C. Adaptive Kalman filtering for the integrated SINS/DVL system[J]. Journal of Computational Information Systems, 2013, 9(16):6443-6450 [9] Hajiyev C, Soken H E. Robust adaptive Kalman filter for estimation of UAV dynamics in the presence of sensor/actuator faults[J]. Aerospace Science and Technology, 2013, 28(1):376-383 doi: 10.1016/j.ast.2012.12.003 [10] 胡辉, 颜瑜军, 欧敏辉, 等.基于模糊逻辑的自适应强跟踪卡尔曼滤波在GPS定位中的应用[J].全球定位系统, 2017, 42(1):6-11 http://d.old.wanfangdata.com.cn/Periodical/qqdwxt201701002Hu H, Yan Y J, Ou M H, et al. Application of adaptive strong tracking Kalman filter based on fuzzy logic to GPS positioning[J]. GNSS World of China, 2017, 42(1):6-11(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/qqdwxt201701002 [11] 黎宝琳.基于半参数模型的卡尔曼滤波在变形监测中的应用[J].地理空间信息, 2017, 15(8):120-123 doi: 10.3969/j.issn.1672-4623.2017.08.038Li B L. Application of Kalman filtering based on semi-parametric model in deformation monitoring[J]. Geospatial Information, 2017, 15(8):120-123(in Chinese) doi: 10.3969/j.issn.1672-4623.2017.08.038 [12] 朱文超, 许德章.双E型弹性体六维力传感器矩形梁Kalman滤波研究[J].机械科学与技术, 2014, 33(6):909-912 http://journals.nwpu.edu.cn/jxkxyjs/CN/abstract/abstract4928.shtmlZhu W C, Xu D Z. Research on Kalman filtering for rectangular beam of dual-E elastic body six-axis force sensor[J]. Mechanical Science and Technology for Aerospace Engineering, 2014, 33(6):909-912(in Chinese) http://journals.nwpu.edu.cn/jxkxyjs/CN/abstract/abstract4928.shtml [13] 邵腾.面向参数不精准系统的Kalman滤波理论研究[D].杭州: 杭州电子科技大学, 2016 http://cdmd.cnki.com.cn/Article/CDMD-10336-1016074091.htmShao T. Kalman filter theory of the mismatched system parameters[D]. Hangzhou: Hangzhou Dianzi University, 2016(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10336-1016074091.htm [14] 薛海建, 郭晓松, 周召发.基于自适应多重渐消因子卡尔曼滤波的SINS初始对准方法[J].系统工程与电子技术, 2017, 39(3):620-626 http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201703024Xue H J, Guo X S, Zhou Z F. SINS initial alignment method based on adaptive multiple fading factors Kalman filter[J]. Systems Engineering and Electronics, 2017, 39(3):620-626(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201703024 [15] 宋会杰, 董绍武, 屈俐俐, 等.基于Sage窗的自适应Kalman滤波用于钟差预报研究[J].仪器仪表学报, 2017, 38(7):1809-1816 doi: 10.3969/j.issn.0254-3087.2017.07.030Song H J, Dong S W, Qu L L, et al. Research on clock difference prediction using adaptive Kalman filter based on Sage window[J]. Chinese Journal of Scientific Instrument, 2017, 38(7):1809-1816(in Chinese) doi: 10.3969/j.issn.0254-3087.2017.07.030 [16] 占芳芳.改进抗差Kalman滤波的INS/GPS紧组合导航算法[J].兰州工业学院学报, 2017, 24(5):75-79 doi: 10.3969/j.issn.1009-2269.2017.05.016Zhan F F. INS/GPS tightly coupled navigation based on improved Robust Kalman filter[J]. Journal of Lanzhou Institute of Technology, 2017, 24(5):75-79(in Chinese) doi: 10.3969/j.issn.1009-2269.2017.05.016 -



 点击查看大图
点击查看大图
图(6) / 表(8)
计量
- 文章访问数: 440
- HTML全文浏览量: 111
- PDF下载量: 58
- 被引次数: 0
