




Workspace Analysis of a Novel Six DOFs Parallel Mechanism with Micro Displacement
-
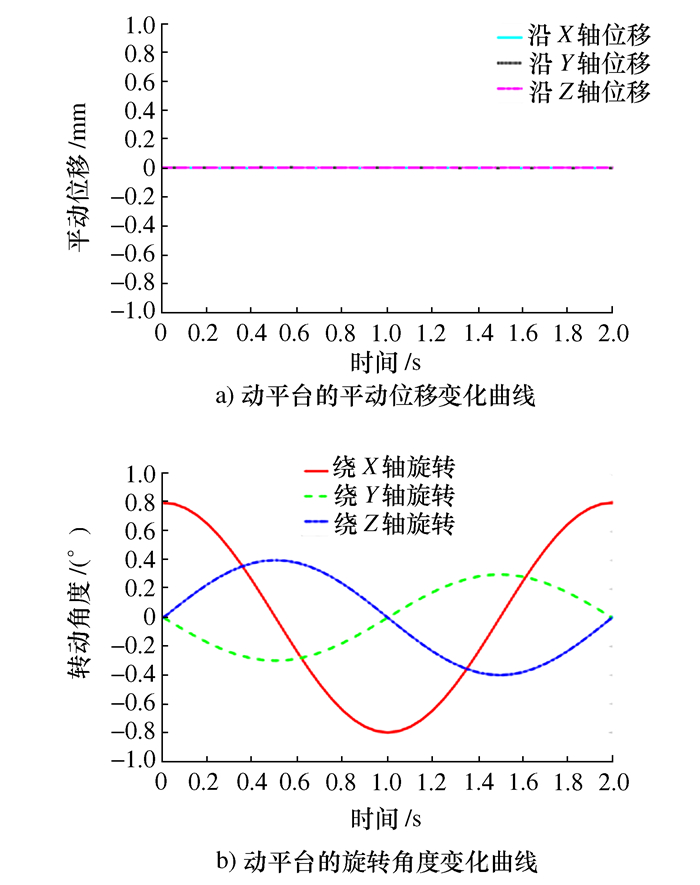
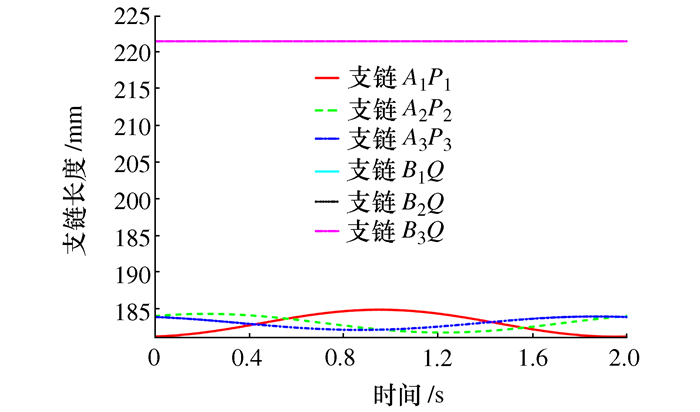
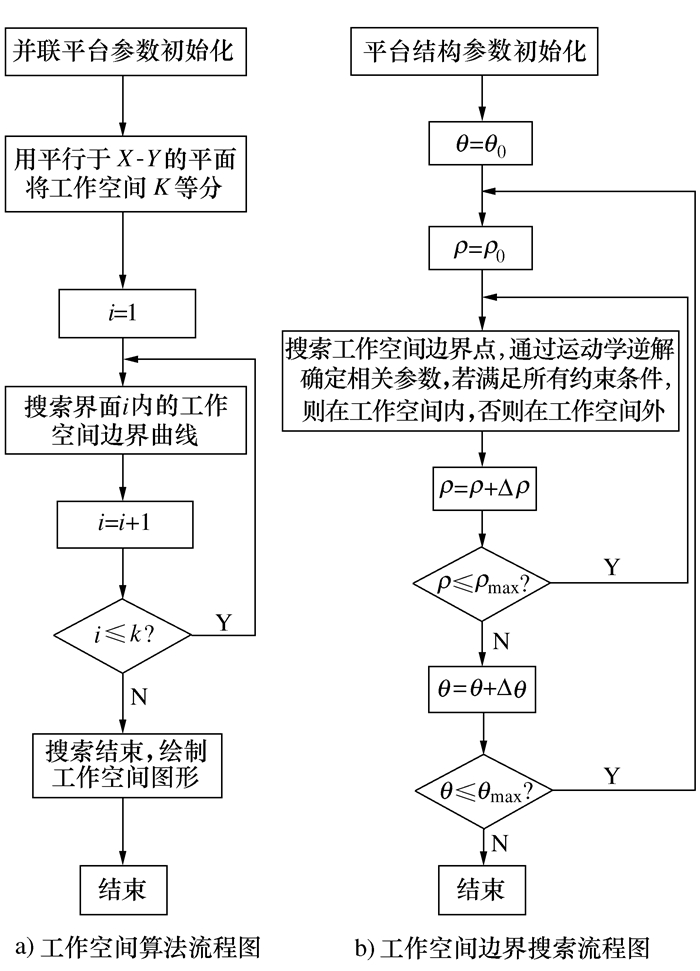
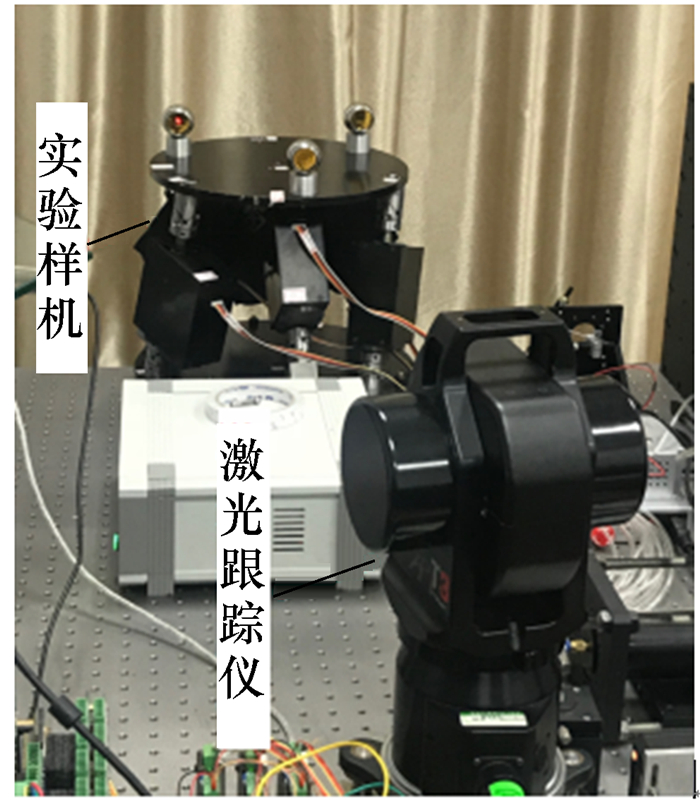
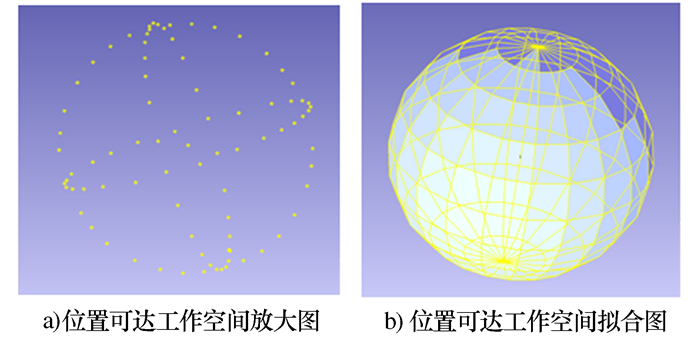
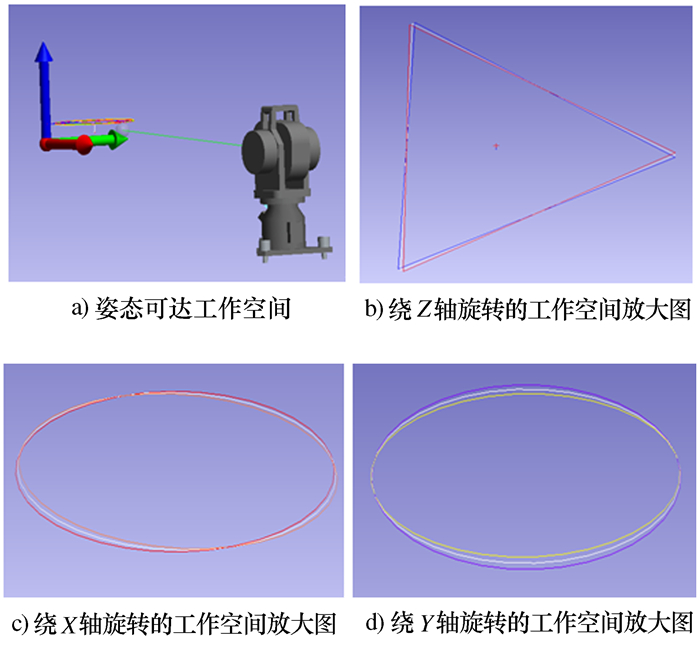
摘要: 在实现天文光学镜面毫米级行程位姿调整和微纳米级精密定位中,基于全柔性铰链的新型3SPS+3(SP-U)六自由度并联机构的工作空间主要由柔性铰链相对较小的回转空间所定义。分析了3SPS+3(SP-U)并联机构运动自由度及其部分自由度解耦特性,并根据实物样机的几何参数建立了其运动学逆解模型。在此基础上,基于柔性铰链回转空间及支链行程范围,采用搜索法分析了其工作空间,并采用激光跟踪仪对样机的工作空间进行了实测。理论计算和实测结果验证了该机构动平台中心点的平动位移空间可达±3 mm,转角空间可达±1°,确保了其在应用中具有足够的工作范围,达到了设计目标。Abstract: In the pose adjustment of millimeter size and the precision positioning of Micro-nano size for the astronomical optical mirror, the workspace of the novel 3SPS+3(SP-U) parallel mechanism with six degrees of freedom (DOFs) which based on fully flexible hinges is mainly determined by the revolving space of flexible hinges. The motion degrees of freedom and partial decoupling characteristics of the novel parallel mechanism are analyzed. According to the geometric parameters of the physical prototype, the model of inverse kinematics is established. On this basis, the search method is used to analyze the workspace of the mechanism, and the laser tracker is used to measure the actual workspace. Both the results of theoretical calculation and measurement show that the translational space of the mechanism's moving platform can reach ±3 mm, as well as the corner space can reach ±1°. It ensures that the mechanism has sufficient workspace in the application, indicating the mechanism has achieved the design goals.
-
Key words:
- parallel mechanisms /
- flexible hinge /
- kinematics analysis /
- workspace /
-
表 2 动平台的转动角度
(°) 控制转动值 激光跟踪仪实测转动值 拟合平面转动值 绕X轴转动 +1 +1.004 6 +1.025 6 -1 -0.996 3 -0.979 9 绕Y轴转动 +1 +1.006 2 +0.992 5 -1 -1.005 2 -0.953 6 绕Z轴转动 +1 +1.005 5 +0.943 3 -1 -1.008 3 -0.935 5  下载: 导出CSV
下载: 导出CSV
-
[1] 文新荣, 胡企千, 周尊源.望远镜主副镜实时自校正系统[J].中国机械工程, 2003, 14(14):1191-1194 doi: 10.3321/j.issn:1004-132X.2003.14.007Wen X R, Hu Q Q, Zhou Z Y. Real-time auto-adjusting system for a telescope[J]. China Mechanical Engineering, 2003, 14(14):1191-1194(in Chines doi: 10.3321/j.issn:1004-132X.2003.14.007 [2] Liu Z, Deng Y Y, Jin Z Y, et al. Introduction to the Chinese giant solar telescope[C]//Proceedings Of the SPIE Volume 8444, Ground-based and Airborne Telescopes Ⅳ. Amsterdam, Netherlands: SPE, 2012: 844405 [3] 顾伯忠, 乐中宇.基于六杆机构的望远镜副镜支承的分析[J].天文研究与技术, 2009, 6(4):334-341 http://d.old.wanfangdata.com.cn/Periodical/yntwttk200904012Gu B Z, Le Z Y. Analysis of a supporting system with a stewart platform for telescope secondary mirror[J]. Astronomical Research & Technology, 2009, 6(4):334-341(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/yntwttk200904012 [4] 李永刚, 宋轶民, 冯志友.并联机器人机构静刚度研究现状与展望[J].机械设计, 2010, 27(3):1-4 http://d.old.wanfangdata.com.cn/Periodical/jxsj201003001Li Y G, Song Y M, Feng Z Y. Overview of the study on the stiffness of parallel manipulators[J]. Journal of Machine Design, 2010, 27(3):1-4(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxsj201003001 [5] 程景全.天文望远镜原理和设计[M].北京:中国科学技术出版社, 2003Cheng J Q. Principles of astronomical telescope design[M]. Beijing:China Science and Technology Press, 2003(in Chinese) [6] Han X G, Cui X L, Chen W Y. Analysis on the instantaneous stiffness of the 3-RPS parallel machine[J]. Key Engineering Materials, 2009, 407-408:63-67 doi: 10.4028/www.scientific.net/KEM.407-408 [7] Yang D H, Jin Z Y, Liu Z. Support optimization of the ring primary mirror of a 2m solar telescope[C]//Proceedings Volume 9906, Ground-based and Airborne Telescopes Ⅵ. Edinburgh, United Kingdom: SPE, 2016: 990651 [8] 杨德华, 程颖, 费飞, 等.一种部分解耦的六自由度并联机构: 中国, 201610439769.2[P].2016-06-17Yang D H, Cheng Y, Fei F, et al. Partially-decoupled six-degree-of-freedom parallel mechanism: CN, 201610439769.2[P]. 2016-06-17(in Chinese) [9] Jun F H, Pei L, Xiang F C. Optimum design of a parabolic flexure hinge based on compliance closed-form equations[J]. Advanced Materials Research, 2012, 424-425:299-303 doi: 10.4028/www.scientific.net/AMR.424-425 [10] Di Gregorio R. Kinematics of the translational 3-URC mechanism[J]. Journal of Mechanism Design, 2004, 126(6):1113-1117 doi: 10.1115/1.1814390 [11] 黄俊杰, 贾智宏, 赵俊伟.3-PRS并联机器人的工作空间研究与分析[J].机械科学与技术, 2012, 31(4):660-663 http://journals.nwpu.edu.cn/jxkxyjs/CN/abstract/abstract5758.shtmlHuang J J, Jia Z H, Zhao J W. Analysis and research on the workspace of 3-PRS parallel robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2012, 31(4):660-663(in Chinese) http://journals.nwpu.edu.cn/jxkxyjs/CN/abstract/abstract5758.shtml [12] 李大海, 宋胜涛, 李瑞琴, 等.对称型平面3-RRR并联机构可达工作空间研究[J].机械传动, 2015, 39(9):29-31, 36 http://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201509007.htmLi D H, Song S T, Li R Q, et al. Research of the reachable workspace of symmetrical planar 3-RRR parallel mechanism[J]. Journal of Mechanical Transmission, 2015, 39(9):29-31, 36(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201509007.htm [13] 程刚, 于敬利, 袁欣, 等.3SPS+1PS髋关节并联仿生试验系统工作空间优化[J].机械工程学报, 2013, 49(23):88-95 http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201323013Cheng G, Yu J L, Yuan X, et al. Study on workspace optimization of 3SPS+1PS parallel hip joint simulator[J]. Journal of Mechanical Engineering, 2013, 49(23):88-95(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201323013 [14] 赵燕江, 张永德, 姜金刚, 等.基于Matlab的机器人工作空间求解方法[J].机械科学与技术, 2009, 28(12):1657-1661, 1666 doi: 10.3321/j.issn:1003-8728.2009.12.027Zhao Y J, Zhang Y D, Jiang J G, et al. A method for solving robot workspace based on Matlab[J]. Mechanical Science and Technology for Aerospace Engineering, 2009, 28(12):1657-1661, 1666(in Chinese) doi: 10.3321/j.issn:1003-8728.2009.12.027 [15] Shah H L. Kinematic, dynamic and workspace analysis of a Novel 6-DOF parallel manipulator[D]. New York: State University of New York, 2010: 16-77 -




 点击查看大图
点击查看大图

图(10) / 表(2)
计量
- 文章访问数: 459
- HTML全文浏览量: 257
- PDF下载量: 50
- 被引次数: 0
