




Trajectory Tracking with Back-stepping Sliding Mode Fuzzy Adaptive Control for Wheeled Mobile Robot
-
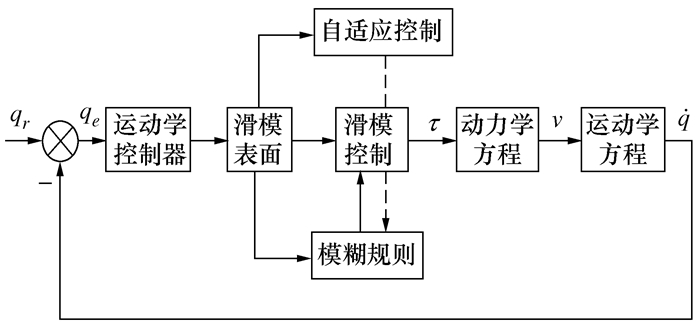
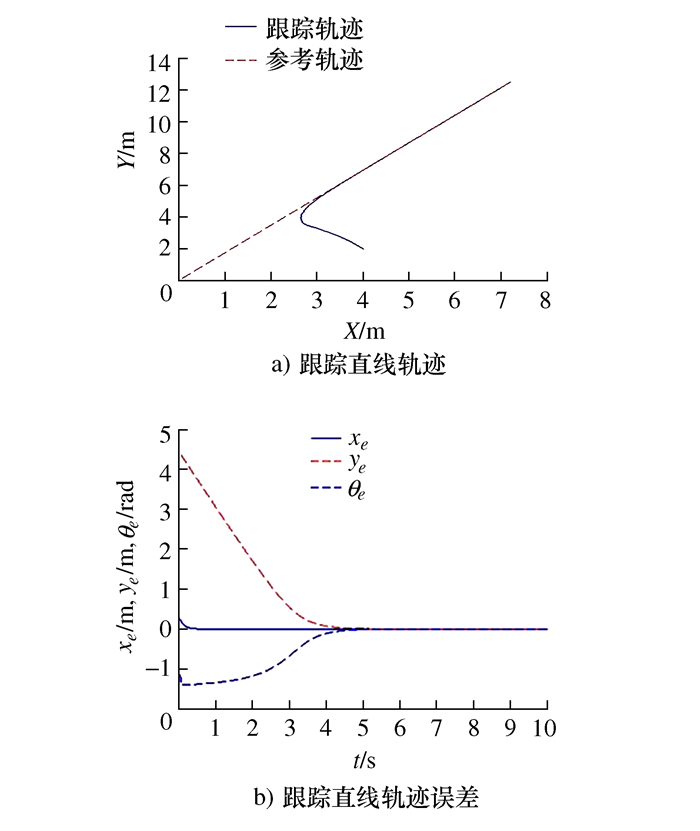
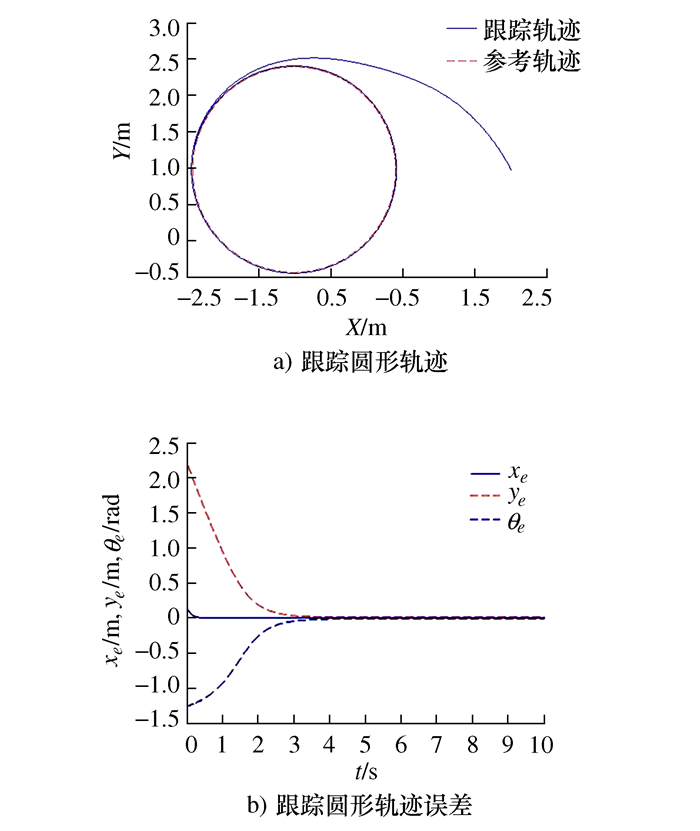
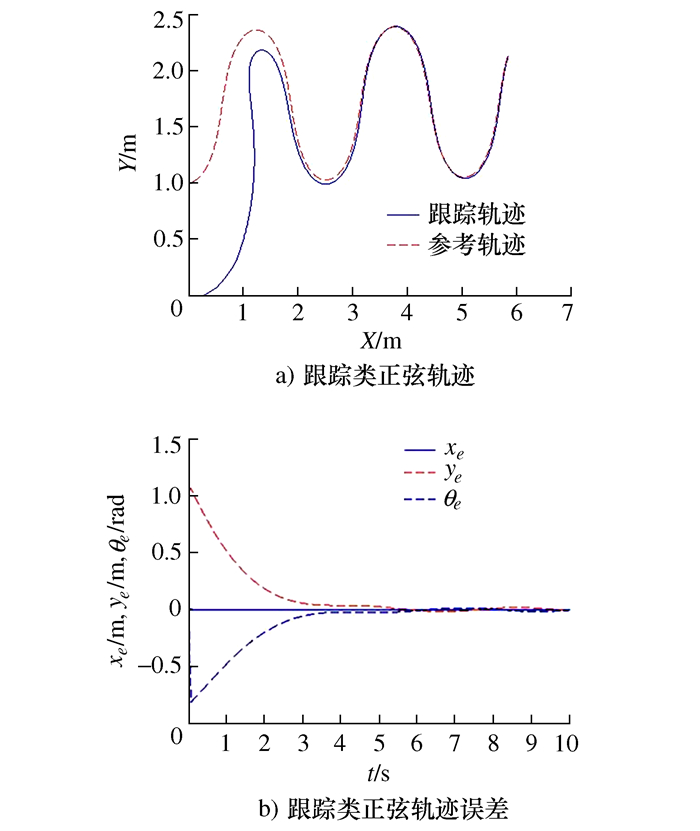
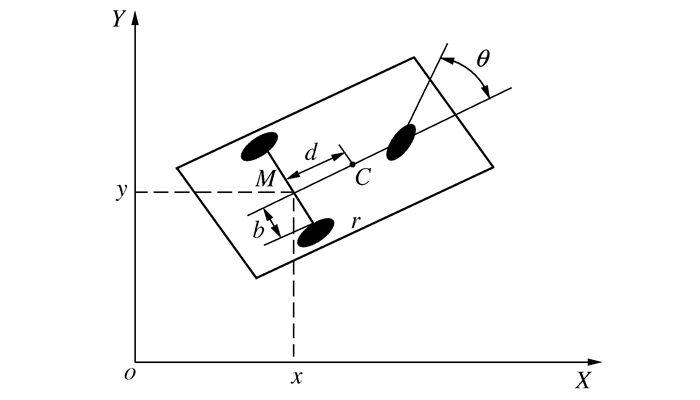
摘要: 为提高两轮驱动轮式移动机器人轨迹跟踪控制的精度,依据轮式移动机器人的运动学和动力学方程,提出了一种具有全局渐进稳定性的控制方法。首先基于Back-stepping建立了轮式移动机器人的运动学控制器;其次通过滑模控制方法建立轮式移动机器人的动力学控制器;然后加入模糊控制系统调节滑模增益以削弱抖振;最后对系统的未知扰动建立自适应控制规律,并证明了其稳定性。以跟踪直线、圆、类正弦轨迹为例进行了仿真研究,验证了该控制方法的有效性。Abstract: In order to improve the control precision of the trajectory tracking of a two-wheel driving wheeled mobile robot, a global asymptotic stability control method is proposed based on its kinematics and dynamics equations model. Firstly, the kinematics controller of the wheeled mobile robot is built based on back-stepping. Secondly, the dynamic controller of the wheeled mobile robot is established with the sliding mode control method. Then, the control law parameters of fuzzy control setting is added to weaken the chattering. Finally, the adaptive control law is established for the unknown disturbance of the wheeled mobile robot, and its stability is proved. The simulation is carried out to track its straight line, circle and sine-like wave, thus verifying the effectiveness of the control method.
-
Key words:
- robots /
- sliding mode control /
- fuzzy control /
- adaptive control system /
- wheeled mobile robot
-
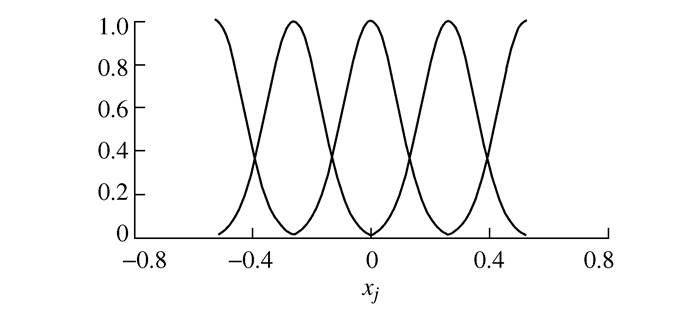
表 1 输出值ε的模糊控制规则表
NB NS ZO PS PB NB NB NB NS NS NB NS NB NB NS NS NS ZO PS NS ZO PS NS PS NB NS PS PS PS PB NB NB PS PB PB  下载: 导出CSV
下载: 导出CSV
-
[1] Wang X B, Shi S M. Analysis of vehicle steering and driving bifurcation characteristics[J]. Mathematical Problems in Engineering, 2015, 2015:847258 [2] Klančar G, Matko D, Blažič S. Wheeled mobile robots control in a linear Platoon[J]. Journal of Intelligent and Robotic Systems, 2009, 54(5):709-731 doi: 10.1007/s10846-008-9285-7 [3] Yoo S J. Adaptive tracking control for a class of wheeled mobile robots with unknown skidding and slipping[J]. IET Control Theory & Applications, 2010, 4(10):2109-2119 http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=5611730 [4] Rashid R, Elamvazuthi I, Begam M, et al. Fuzzy-based navigation and control of a non-holonomic mobile robot[J]. Journal of Computing, 2010, 2(3):130-137 http://d.old.wanfangdata.com.cn/OAPaper/oai_arXiv.org_1003.4081 [5] 王敏, 杜克林, 黄心汉.机器人滑模轨迹跟踪控制研究[J].机器人, 2001, 23(3):217-221 doi: 10.3321/j.issn:1002-0446.2001.03.006Wang M, Du K L, Huang X H. Research on tracking control of robotic sliding mode trajectory[J]. Robot, 2001, 23(3):217-221(in Chinese) doi: 10.3321/j.issn:1002-0446.2001.03.006 [6] 张合新, 范金锁, 孟飞, 等.一种新型滑模控制双幂次趋近律[J].控制与决策, 2013, 28(2):289-293 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc201302025Zhang H X, Fan J S, Meng F, et al. A new double power reaching law for sliding mode control[J]. Control and Decision, 2014, 28(2):289-293(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc201302025 [7] Cieliebak M, Flocchini P, Prencipe G, et al. Distributed computing by mobile robots:gathering[J]. SIAM Journal on Computing, 2012, 41(4):829-879 doi: 10.1137/100796534 [8] 陈志煌, 陈力.漂浮基双臂空间机器人姿态、关节协调运动的模糊变结构滑模控制[J].机械科学与技术, 2009, 28(7):945-949 doi: 10.3321/j.issn:1003-8728.2009.07.023Chen Z H, Chen L. Fuzzy variable structure sliding-mode control for a dual-arm space robot to track the desired trajectory in a joint space[J]. Mechanical Science and Technology for Aerospace Engineering, 2009, 28(7):945-949(in Chinese) doi: 10.3321/j.issn:1003-8728.2009.07.023 [9] 穆效江.多关节机器人的智能滑模变结构控制方法研究[D].北京: 北京工业大学, 2008Mu X J. Research on intelligent sliding mode variable structure control for multi-link robots[D]. Beijing: Beijing University of Technology, 2008(in Chinese) [10] 闫茂德, 吴青云, 贺昱耀.非完整移动机器人的自适应滑模轨迹跟踪控制[J].系统仿真学报, 2007, 19(3):579-581, 584 doi: 10.3969/j.issn.1004-731X.2007.03.029Yan M D, Wu Q Y, He Y Y. Adaptive sliding mode tracking control of nonholonomic mobile robot[J]. Journal of System Simulation, 2007, 19(3):579-518, 584(in Chinese) doi: 10.3969/j.issn.1004-731X.2007.03.029 [11] 刘金琨.滑模变结构控制MATLAB仿真:先进控制系统设计方法[M]. 3版.北京:清华大学出版社, 2015Liu J K. Sliding mode control design and MATLAB simulation:the design method of advanced control system[M]. 3rd ed. Beijing:Tsinghua University Press, 2015(in Chinese) [12] Fateh M M. Robust fuzzy control of electrical manipulators[J]. Journal of Intelligent & Robotic Systems, 2010, 60(3-4):415-434 http://d.old.wanfangdata.com.cn/Periodical/gjzdhyjszz-e201301008 [13] Resende C Z, Carelli R, Sarcinelli-Filho M. A nonlinear trajectory tracking controller for mobile robots with velocity limitation via fuzzy gains[J]. Control Engineering Practice, 2013, 21(10):1302-1309 doi: 10.1016/j.conengprac.2013.05.012 [14] Yang J G, Wang K, Yang H Y, et al. A real-time adaptive control algorithm using neural nets with perturbation[J]. Journal of Zhejiang University-Science A, 2000, 1(1):61-65 doi: 10.1631/jzus.2000.0061 [15] Tong S C, Li H X. Fuzzy adaptive sliding-mode control for MIMO nonlinear systems[J]. IEEE Transactions on Fuzzy Systems, 2003, 11(3):354-360 doi: 10.1109/TFUZZ.2003.812694 -

 点击查看大图
点击查看大图
图(6) / 表(1)
计量
- 文章访问数: 910
- HTML全文浏览量: 163
- PDF下载量: 409
- 被引次数: 0
