




Acceleration/Deceleration Control Algorithm of Full-types Asymmetric Seven-segment S-shape Curve
-
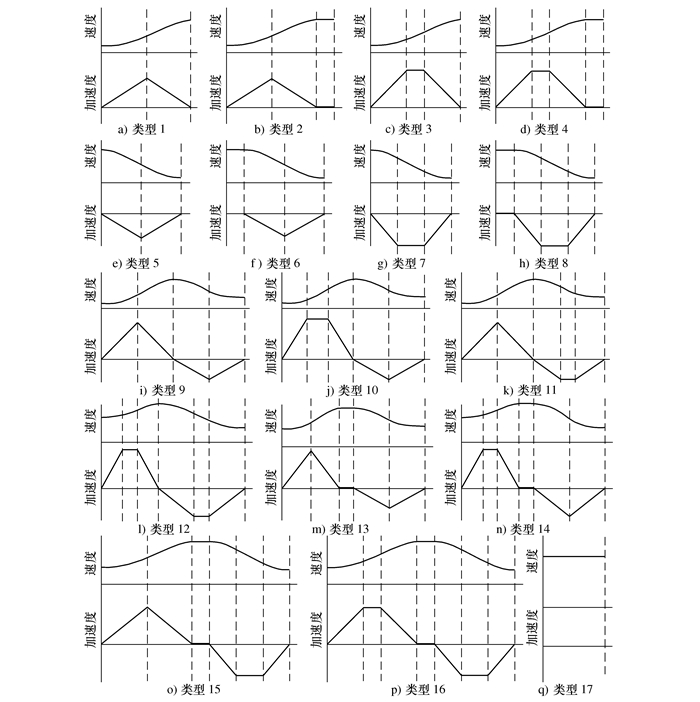
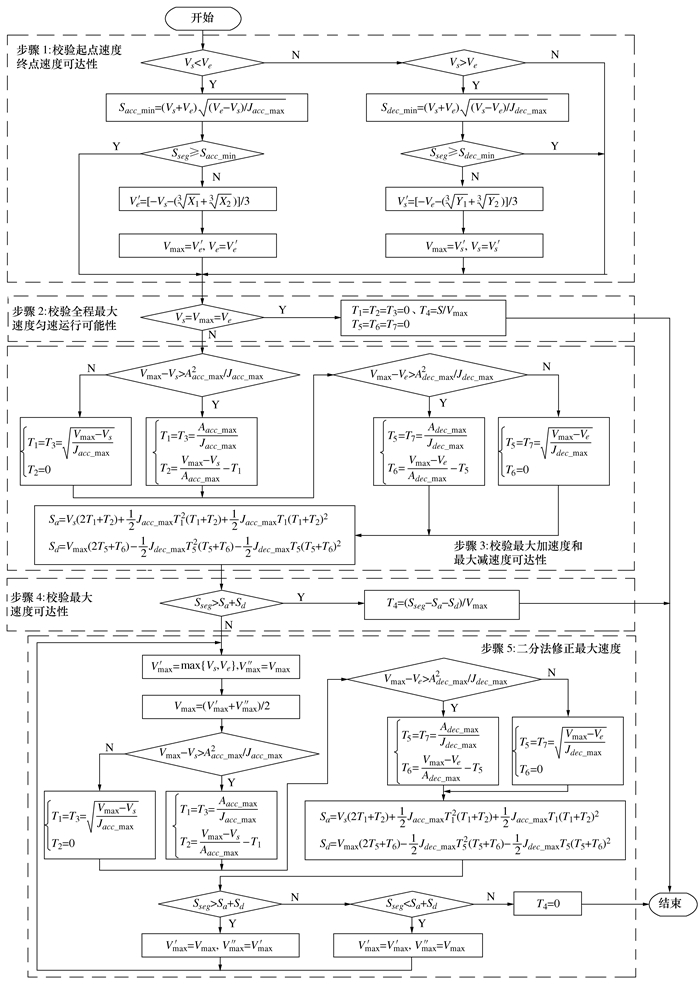
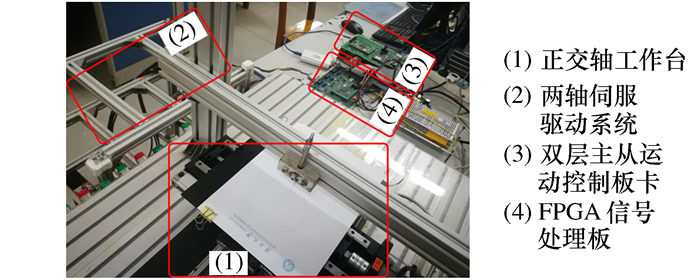
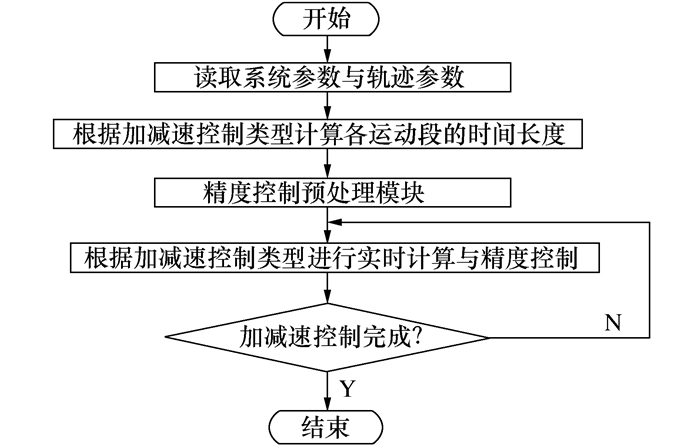
摘要: 为减小运动控制系统在启动、停止、加速和减速运动阶段的振动和冲击,提出全类型非对称七段式S型曲线加减速控制算法。通过分析最大加速度、最大减速度和最大速度的可达性,规划出17种速度曲线类型;考虑在给定轨迹段长约束下,保证系统能够从起点速度运动到终点速度,提出基于给定轨迹段长约束的起点速度和终点速度可达性校验;在给定轨迹段长度小于系统从起点速度运动到终点速度所需最短轨迹段长的情况下,采用盛金公式修正起点速度和终点速度,推导并优化S型曲线加减速控制算法流程。在自主开发多轴运动控制器卡上,验证所提出的全类型非对称七段式S型曲线加减速控制算法。实验结果表明:在保证最大加速度、最大减速度和最大速度不超限情况下,该算法可规划出17种速度曲线类型;在给定轨迹段长度较短系统无法从起点速度运动到终点速度的情形下,该算法解决了起点速度和终点速度的可达性校验及修正问题。Abstract: In order to reduce the vibration and impact of motion control system during start, stop, acceleration and deceleration stages, a acceleration/deceleration control algorithm of full-types asymmetric seven-segment S-shape curve was proposed. Through accessibility analysis of the maximum acceleration, maximum deceleration and maximum speed, 17 kinds of speed curve types were planned. To guarantee system can move from the starting speed to the ending speed under constraint of given trajectory length, a reachability checking of starting speed and ending speed was presented. The ShengJin formula is used to correct starting velocity and end velocity when the given trajectory length is smaller than the minimum trajectory length required by the system moving from starting velocity to end velocity. And also, the flowchart of S-curve acceleration/deceleration control algorithm was deduced and optimized. Experiments were carried out to verify the proposed S-shape curve control algorithm on the self-designed multi-axis motion control board. The experimental results show that the algorithm can plan 17 types of velocity curves, the maximum acceleration, maximum deceleration and maximum speed can be restricted without exceeding limits, the problem of reachability check and correction of starting speed and ending speed under constraint of a given trajectory length can be solved.
-
Key words:
- asymmetric S-shape curve /
- seven-segment /
- Shengjin formula /
- reachability checking
-
表 1 17种速度曲线变化类型的轨迹参数
参数组别 起点速度/
(mm·s-1)终点速度/
(mm·s-1)最大速度/
(mm·s-1)轨迹路径长度/mm 1 10.0 50.0 50.0 3.0 2 10.0 50.0 50.0 6.0 3 10.0 150.0 150.0 20.0 4 10.0 150.0 150.0 30.0 5 50.0 20.0 50.0 3.0 6 50.0 20.0 50.0 6.0 7 150.0 20.0 150.0 20.0 8 150.0 20.0 150.0 30.0 9 10.0 20.0 50.0 6.0 10 10.0 20.0 50.0 15.0 11 10.0 100.0 150.0 30.0 12 10.0 100.0 150.0 50.0 13 80.0 20.0 150.0 40.0 14 80.0 20.0 150.0 60.0 15 10.0 20.0 150.0 40.0 16 10.0 20.0 150.0 60.0 17 100.0 100.0 100.0 60.0  下载: 导出CSV
下载: 导出CSV
表 2 17种轨迹参数S曲线加减速控制的实际输出参数
参数组别 位移/mm 最大速度/
(mm·s-1)最大加速度/
(mm·s-2)最大加加速度/
(mm·s-3)加速阶段 减速阶段 加速阶段 减速阶段 1 3.0 39.0 475.8 - 7 799.9 - 2 6.0 50.0 553.8 - 7 799.9 - 3 20.0 141.0 779.9 - 7 799.9 - 4 30.0 150.0 779.9 - 7 799.9 - 5 3.0 41.5 - 431.2 - 8 799.9 6 6.0 50.0 - 510.4 - 8 799.9 7 20.0 147.8 - 879.9 - 8 799.9 8 30.0 150.0 - 879.9 - 8 799.9 9 6.0 39.9 483.6 422.4 7 799.9 8 799.9 10 15.0 50.0 553.8 510.4 7 799.9 8 799.9 11 29.9 126.2 779.9 490.2 7 799.9 8 599.9 12 50.0 150.0 779.9 659.9 7 799.9 8 799.9 13 40.0 144.6 709.8 879.9 7 799.9 8 799.9 14 60.0 150.0 733.2 879.9 7 799.9 8 799.9 15 40.0 141.0 779.9 879.9 7 799.9 8 799.9 16 60.0 150.0 779.9 879.9 7 799.9 8 799.9 17 60.0 100.0 - - - - 注:“-”表示无该段运动。
下载: 导出CSV
-
[1] 穆海华, 周云飞, 严思杰, 等.超精密点对点运动三阶轨迹规划精度控制[J].机械工程学报, 2008, 44(1):126-132 doi: 10.3321/j.issn:0577-6686.2008.01.022Mu H H, Zhou Y F, Yan S J, et al. Precision control of third-order profile planning for high accuracy point-to-point motion system[J]. Chinese Journal of Mechanical Engineering, 2008, 44(1):126-132(in Chinese) doi: 10.3321/j.issn:0577-6686.2008.01.022 [2] Wu C, Zhang G, Ge Y W, et al. An improved linear ACC/DEC algorithm for CNC system[J]. Journal of Convergence Information Technology, 2012, 7(22):451-459 doi: 10.4156/jcit [3] Zheng K M, Cheng L. Adaptive s-curve acceleration/deceleration control method[C]//Proceedings of the 7th World Congress on Intelligent Control and Automation. Chongqing, China: IEEE, 2008 [4] 刘志峰, 张森, 蔡力钢, 等.基于粒子群优化五阶段S曲线加减速控制算法[J].北京工业大学学报, 2015, 41(5):641-648 http://d.old.wanfangdata.com.cn/Periodical/bjgydxxb201505001Liu Z F, Zhang S, Cai L G, et al. Five-phase s-curve control method based on particle swarm optimization[J]. Journal of Beijing University of Technology, 2015, 41(5):641-648(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/bjgydxxb201505001 [5] 杨亮亮, 许守金, 史伟民, 等.基于牛顿迭代法的S形加减速时间算法研究[J].中国机械工程, 2015, 26(7):912-916, 942 doi: 10.3969/j.issn.1004-132X.2015.07.010Yang L L, Xu S J, Shi W M, et al. Research on the algorithm of S-type of acceleration and deceleration time based on Newton iterative method[J]. China Mechanical Engineering, 2015, 26(7):912-916, 942(in Chinese) doi: 10.3969/j.issn.1004-132X.2015.07.010 [6] Jeon J W, Ha Y Y. A generalized approach for the acceleration and deceleration of industrial robots and CNC machine tools[J]. IEEE Transactions on Industrial Electronics, 2000, 47(1):133-139 doi: 10.1109/41.824135 [7] Osornio-Rios R A, De Jesus Romero-Troncoso R, Herrera-Ruiz G, et al. Computationally efficient parametric analysis of discrete-time polynomial based acceleration-deceleration profile generation for industrial robotics and CNC machinery[J]. Mechatronics, 2007, 17(9):511-523 doi: 10.1016/j.mechatronics.2007.05.004 [8] Osornio-Rios R A, De Jesús Romero-Troncoso R, Herrera-Ruiz G, et al. FPGA implementation of higher degree polynomial acceleration profiles for peak jerk reduction in servomotors[J]. Robotics and Computer-Integrated Manufacturing, 2009, 25(2):379-392 doi: 10.1016/j.rcim.2008.01.002 [9] 潘海鸿, 杨微, 陈琳, 等.全程S曲线加减速控制的自适应分段NURBS曲线插补算法[J].中国机械工程, 2010, 21(2):190-195 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=SciencePaper201303040000436186Pan H H, Yang W, Chen L, et al. Adaptive piecewise NURBS curve interpolator algorithm for entireness process s-curve ACC/DEC control[J]. China Mechanical Engineering, 2010, 21(2):190-195(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=SciencePaper201303040000436186 [10] 潘海鸿, 杨增启, 陈琳, 等.一种适用于前瞻的高精度7段式非对称S曲线加减速控制[J].机械科学与技术, 2015, 34(7):1024-1030 http://journals.nwpu.edu.cn/jxkxyjs/CN/abstract/abstract6108.shtmlPan H H, Yang Z Q, Chen L, et al. A high-precision acceleration and deceleration control of 7-segment dissymmetrical s-shape curve for look-ahead[J]. Mechanical Science and Technology for Aerospace Engineering, 2015, 34(7):1024-1030(in Chinese) http://journals.nwpu.edu.cn/jxkxyjs/CN/abstract/abstract6108.shtml [11] Nguyen K D, Ng T C, Chen I M. On algorithms for planning s-curve motion profiles[J]. International Journal of Advanced Robotic Systems, 2008, 5(1):99-106 http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_0aedc5c4db13c44082230b4eba96d63a [12] 石川, 赵彤, 叶佩青, 等.数控系统S曲线加减速规划研究[J].中国机械工程, 2007, 18(12):1421-1425 doi: 10.3321/j.issn:1004-132X.2007.12.009Shi C, Zhao T, Ye P Q, et al. Study on s-shape curve acceleration and deceleration control on NC system[J]. China Mechanical Engineering, 2007, 18(12):1421-1425(in Chinese) doi: 10.3321/j.issn:1004-132X.2007.12.009 [13] 张振华.数控系统加减速算法及定位技术研究[D].辽宁大连: 大连理工大学, 2007Zhang Z H. Study on the acceleration/deceleration algorithm and positioning technology of CNC system[D]. Liaoning Dalian: Dalian University of Technology, 2007(in Chinese) [14] 商允舜.CNC数控系统加减速控制方法研究与实现[D].杭州: 浙江大学, 2006Shang Y S. Study and realization of acceleration/deceleration control for CNC system[D]. Hangzhou: Zhejiang University, 2006(in Chinese) [15] Erkorkmaz K, Altintas Y. High speed CNC system design. Part Ⅰ:jerk limited trajectory generation and quintic spline interpolation[J]. International Journal of Machine Tools and Manufacture, 2001, 41(9):1323-1345 doi: 10.1016/S0890-6955(01)00002-5 [16] Fan S J. A new extracting formula and a new distinguishing means on the one variable cubic equation[J]. Natural Science Journal of Hainan Teachers College, 1989, 2(2):91-98 -

 点击查看大图
点击查看大图
图(7) / 表(2)
计量
- 文章访问数: 1832
- HTML全文浏览量: 380
- PDF下载量: 382
- 被引次数: 0
