




Design and Analysis of a Mechanism for Spatial Translational Parallel Robot
-
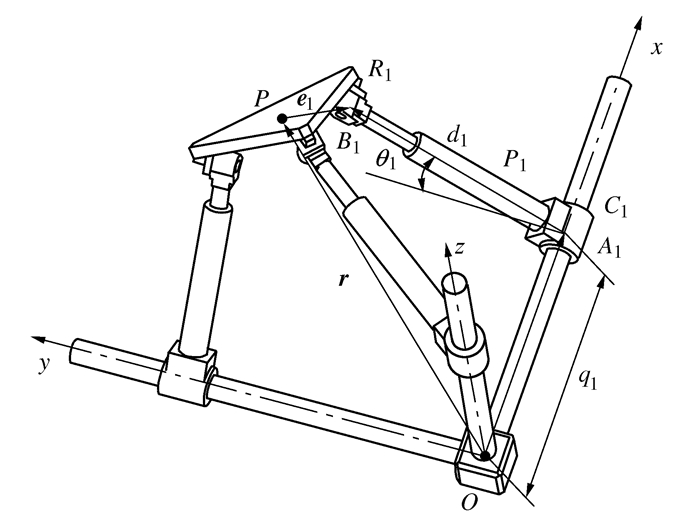
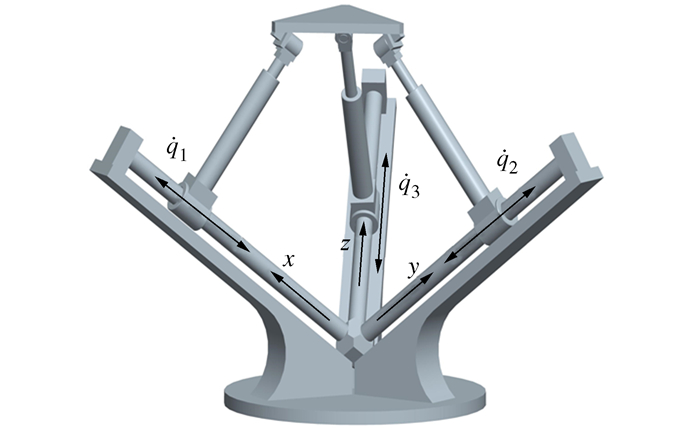
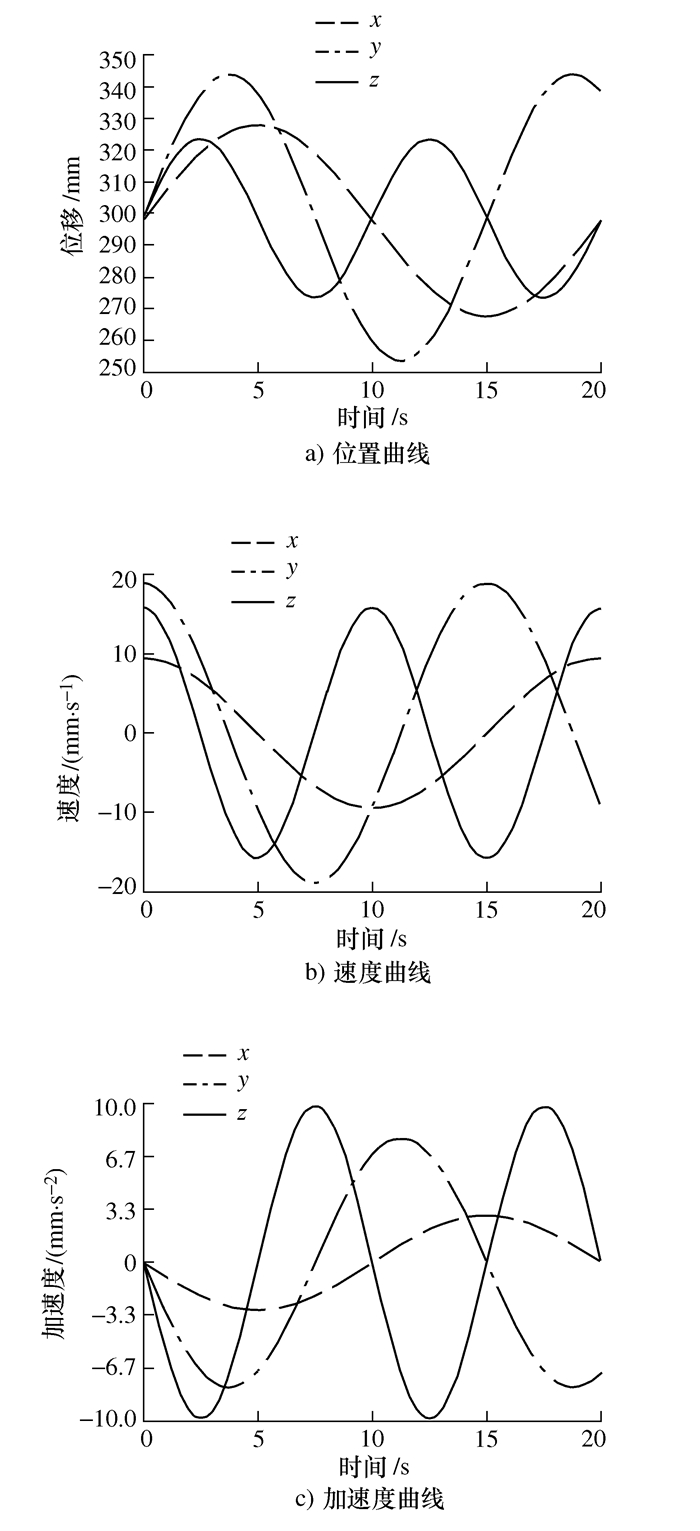
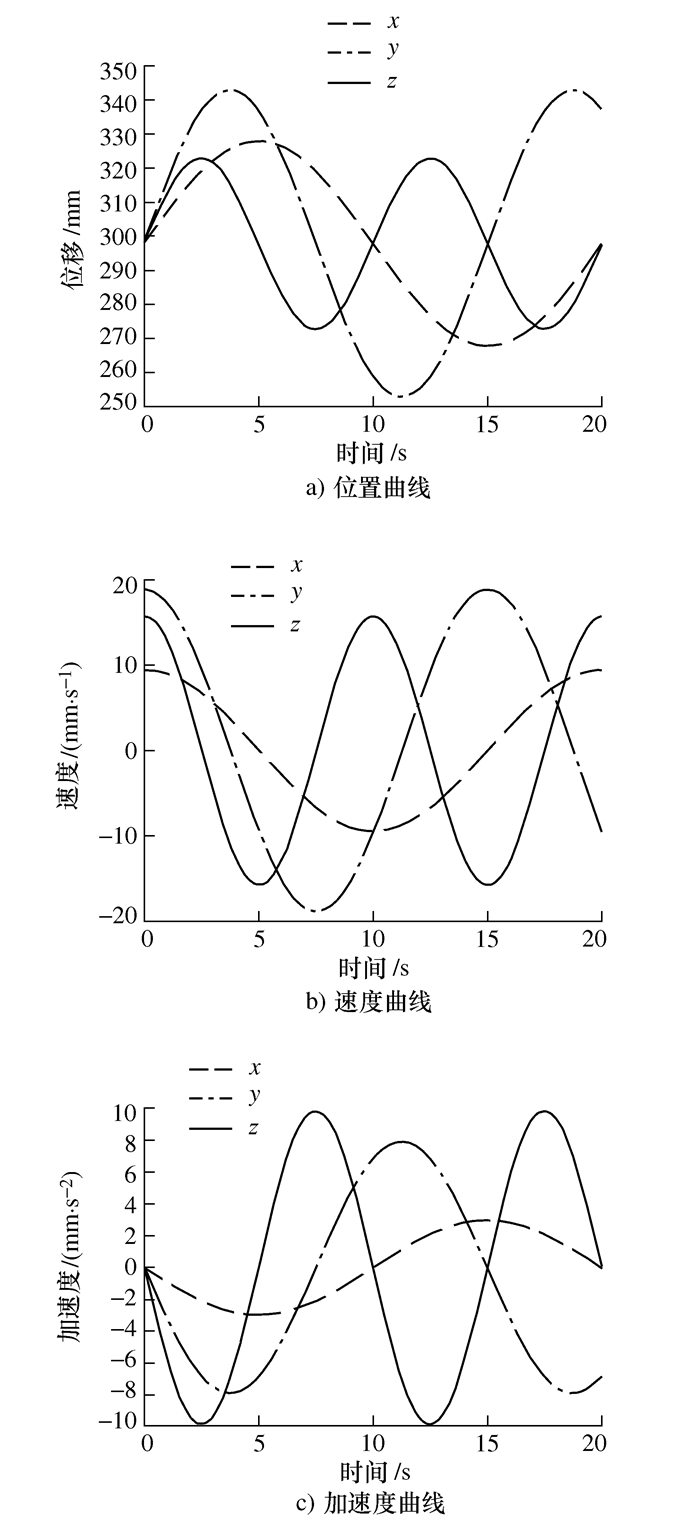
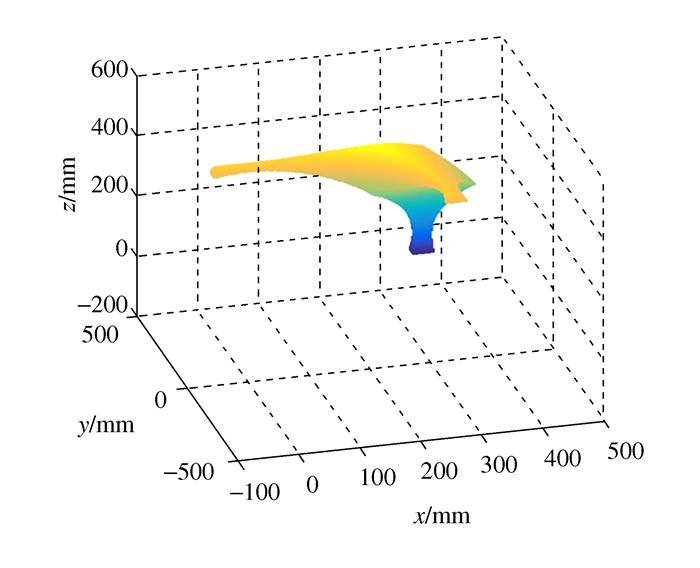
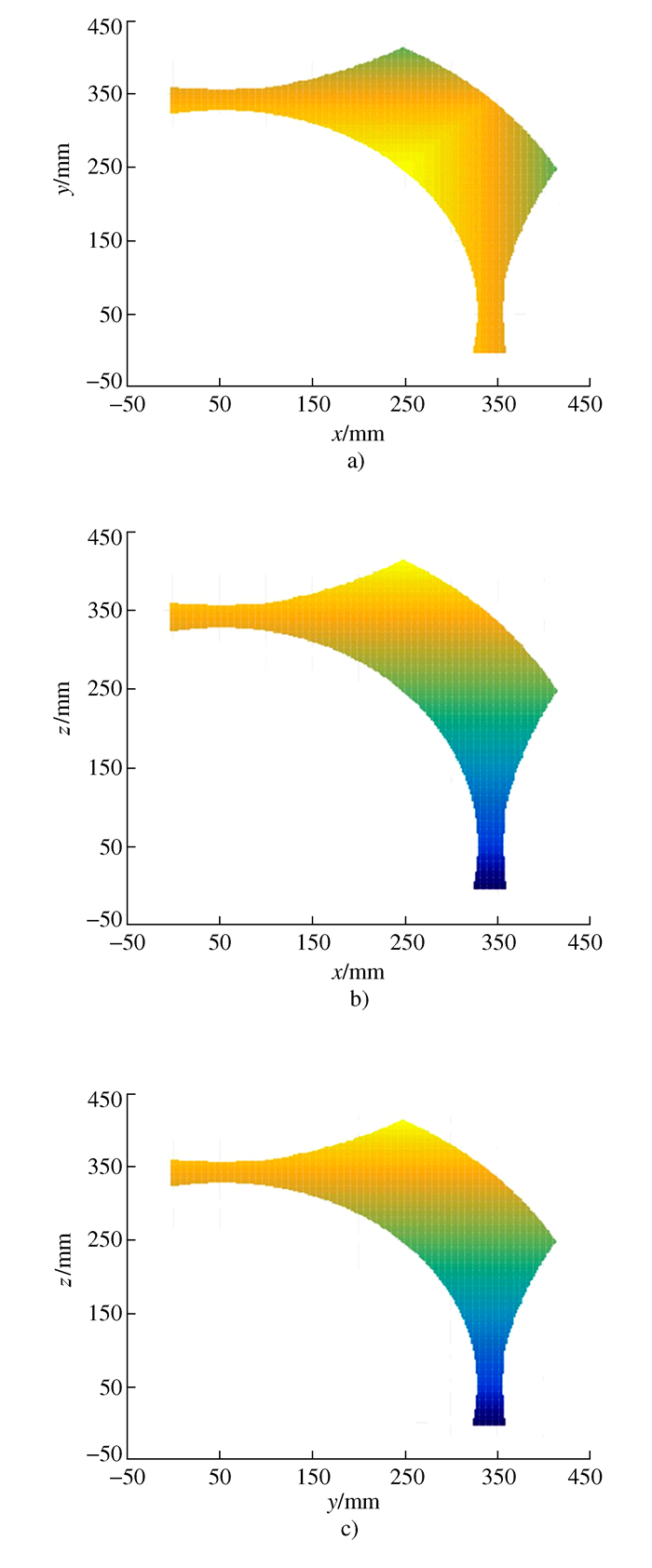
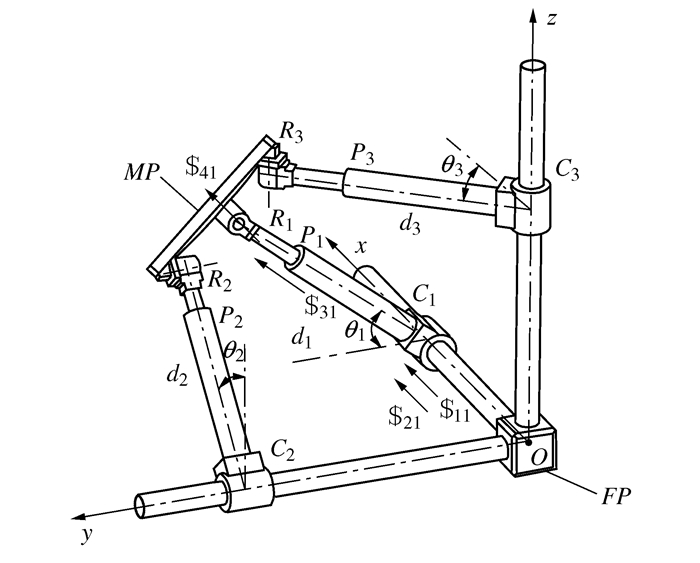
摘要: 提出一种空间移动并联机器人机构,该机构由静平台、动平台和连接两平台的三条结构完全相同的CPR型分支运动链构成。基于螺旋理论对其动平台运动输出特性进行了分析,并利用全局雅可比矩阵研究了机构的主动输入选取和奇异性;根据不同的主动输入方式建立了机构的位置矢量方程,尤其是当采用圆柱副的线性位移作为主动输入时,机构动平台的输出运动与主动输入间呈一对一的线性映射控制关系,其速度雅可比矩阵为阶单位阵,因此该机构在整个工作空间内具有完全各向同性的特性;利用ADAMS和MATLAB软件对机构进行运动学仿真;最后,讨论了机构的工作空间。Abstract: A mechanism for spatial translational parallel robotic, which is composed of a fixed base connected to a moving platform by three identical CPR-type kinematic chains, is put forward. Based on the screw theory, the output motion characteristics of the moving platform are analyzed. Selection of the actuated inputs and singularity of the mechanism are discussed by means of the overall Jacobian matrix. According to the different input forms, the kinematic vector equations of the mechanism are established. Especially, when the linear displacements of three cylindrical joints are selected as the actuated inputs, there exists one-to-one linear mapping control relationship between the outputs of the moving platform and the inputs of the actuated joints. Meanwhile, it is derived that its Jacobian is a unit matrix, which indicates that the mechanism has the fully-isotropic performance throughout its whole workspace. The kinematic simulation is also carried out by using software MATLAB and ADAMS. Finally, workspace of the mechanism is discussed.
-
Key words:
- parallel robotic mechanism /
- screw theory /
- fully-isotropy /
- kinematic analysis /
- workspace
-
[1] Kong X W, Gosselin C M. Type synthesis of input-output decoupled parallel manipulators[J]. Transactions of the Canadian Society for Mechanical Engineering, 2004, 28(2A):185-196 doi: 10.1139/tcsme-2004-0014 [2] Carbonari L, Battistelli M, Callegari M, et al. Dynamic modelling of a 3-CPU parallel robot via screw theory[J]. Mechanical Sciences, 2013, 4(1):185-197 doi: 10.5194/ms-4-185-2013 [3] Gan D M, Dai J S, Dias J, et al. Joint force decomposition and variation in unified inverse dynamics analysis of a metamorphic parallel mechanism[J]. Meccanica, 2016, 51(7):1583-1593 doi: 10.1007/s11012-015-0216-y [4] De La Torre H, Rodriguez-Leal E. Instantaneous kinematics analysis via screw-theory of a novel 3-CRC parallel mechanism[J]. International Journal of Advanced Robotic Systems, 2016, 13(3):128 doi: 10.5772/63748 [5] Rodriguez-Leal E, Dai J S, Pennock G R. A study of the instantaneous kinematics of the 5-RSP parallel mechanism using screw theory[M]//Dai J S, Zoppi M, Kong X W. Advances in Reconfigurable Mechanisms and Robots I. London: Springer, 2012: 355-369 [6] 周昌春, 葛德俊.三自由度冗余驱动飞行模拟器设计及分析[J].机械科学与技术, 2017, 36(9):1458-1463 http://journals.nwpu.edu.cn/jxkxyjs/CN/abstract/abstract6826.shtmlZhou C C, Ge D J. Designing and analyzing kinematics of 3-DOF redundant-actuation flight simulator[J]. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(9):1458-1463(in Chinese) http://journals.nwpu.edu.cn/jxkxyjs/CN/abstract/abstract6826.shtml [7] Callegari M, Gabrielli A, Ruggiu M. Kineto-elasto-static synthesis of a 3-CRU spherical wrist for miniaturized assembly tasks[J]. Meccanica, 2008, 43(4):377-389 doi: 10.1007/s11012-007-9100-8 [8] 常定勇, 方跃法.多输出3D打印并联机器人的设计分析与实验[J].机械科学与技术, 2017, 36(5):670-678 http://journals.nwpu.edu.cn/jxkxyjs/CN/abstract/abstract6700.shtmlChang D Y, Fang Y F. Design and experimental analysis of a multi-output 3D printing parallel robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(5):670-678(in Chinese) http://journals.nwpu.edu.cn/jxkxyjs/CN/abstract/abstract6700.shtml [9] 朱伟, 马履中, 吴伟光, 等.基于三平移并联机构的三维减振平台建模与仿真[J].农业机械学报, 2008, 39(1):142-146 http://d.old.wanfangdata.com.cn/Periodical/nyjxxb200801035Zhu W, Ma L Z, Wu W G, et al. Modeling and simulation analysis on multi-dimensional damping platform base on three-translation parallel mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(1):142-146(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/nyjxxb200801035 [10] 冯李航, 张为公, 龚宗洋, 等.Delta系列并联机器人研究进展与现状[J].机器人, 2014, 36(3):375-384 http://d.old.wanfangdata.com.cn/Periodical/jqr201403018Feng L H, Zhang G W, Gong Z Y, et al. Developments of Delta-like parallel manipulators-a review[J]. Robot, 2014, 36(3):375-384(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jqr201403018 [11] Kong X W, Gosselin C M. Type synthesis of linear translational parallel manipulators[M]//Lenarčič J, Thomas F. Advances in Robot Kinematics: Theory and Applications. Dordrecht: Springer, 2002.453-462 [12] Zhang Y B, Liu H Z, Wu X. Kinematics analysis of a novel parallel manipulator[J]. Mechanism and Machine Theory, 2009, 44(9):1648-1657 doi: 10.1016/j.mechmachtheory.2009.01.006 [13] Kong X W, Gosselin C M. Kinematics and singularity analysis of a novel type of 3-CRR 3-DOF translational parallel manipulator[J]. The International Journal of Robotics Research, 2002, 21(9):791-798 doi: 10.1177/02783649020210090501 [14] 张彦斌, 张树乾, 吴鑫.3-CRPa移动并联机构运动学分析与仿真[J].农业机械学报, 2012, 43(7):200-205 doi: 10.6041/j.issn.1000-1298.2012.07.037Zhang Y B, Zhang S Q, Wu X. Kinematic analysis and simulation of 3-CRPa translational parallel mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(7):200-205(in Chinese) doi: 10.6041/j.issn.1000-1298.2012.07.037 [15] 曹浩峰, 曹毅, 秦友蕾, 等.新型完全各向同性3T并联机构及其特性分析[J].中国机械工程, 2016, 27(10):1377-1381, 1403 doi: 10.3969/j.issn.1004-132X.2016.10.016Cao H F, Cao Y, Qin Y L, et al. Analysis of a novel fully-isotropy 3T parallel mechanism[J]. China Mechanical Engineering, 2016, 27(10):1377-1381, 1403(in Chinese) doi: 10.3969/j.issn.1004-132X.2016.10.016 -

 下载:
下载:
 点击查看大图
点击查看大图
图(7)
计量
- 文章访问数: 753
- HTML全文浏览量: 162
- PDF下载量: 411
- 被引次数: 0
