




Applying Cuckoo Search Algorithm to Path Planning of Space Manipulator
-
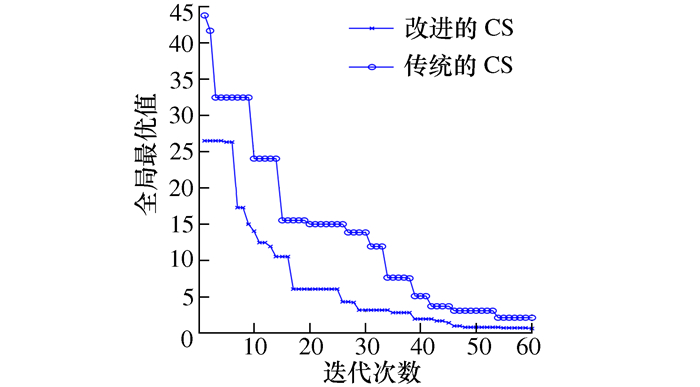
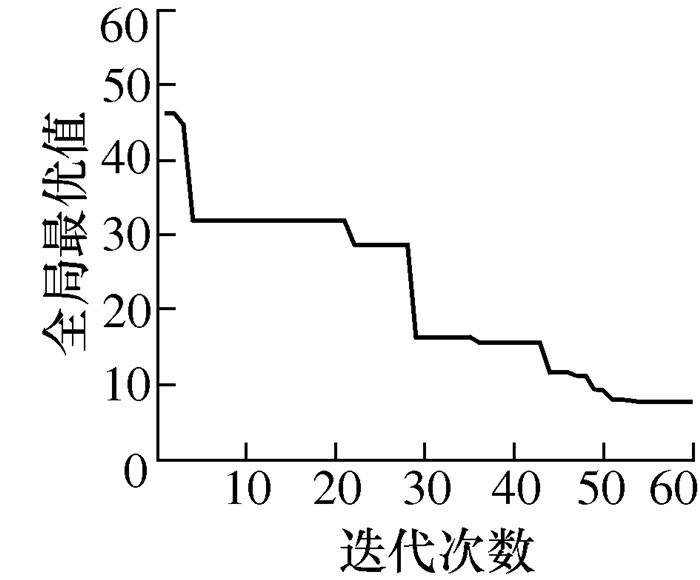
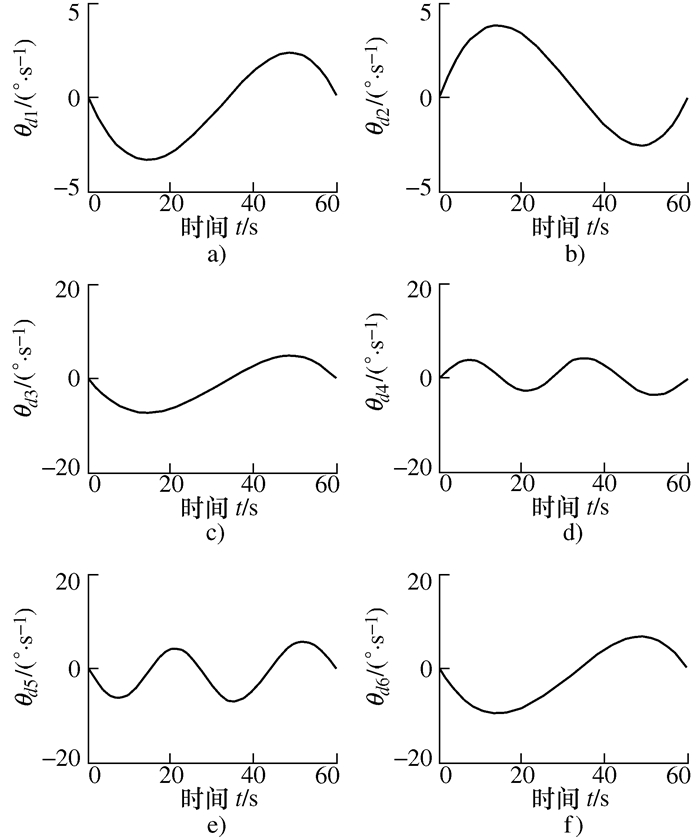
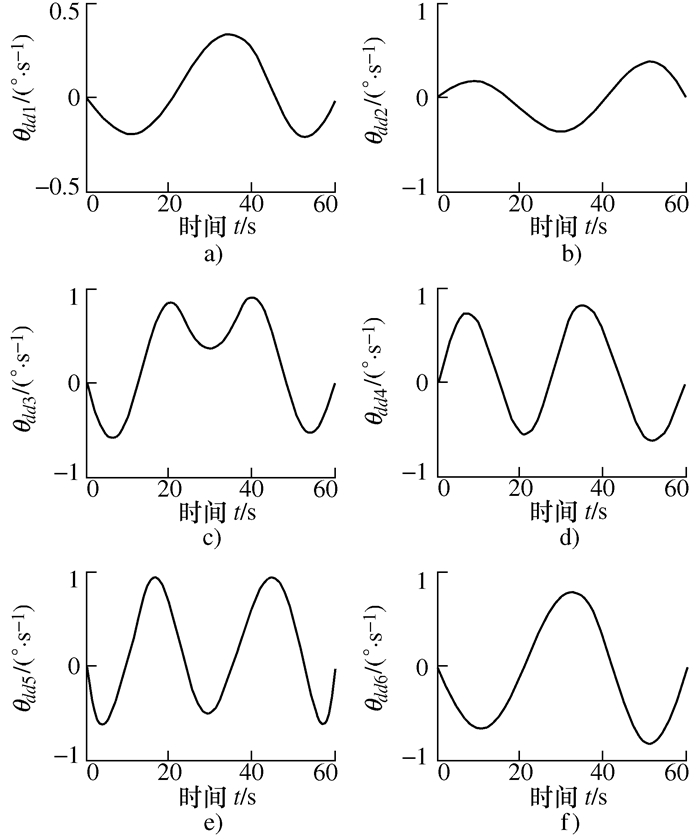
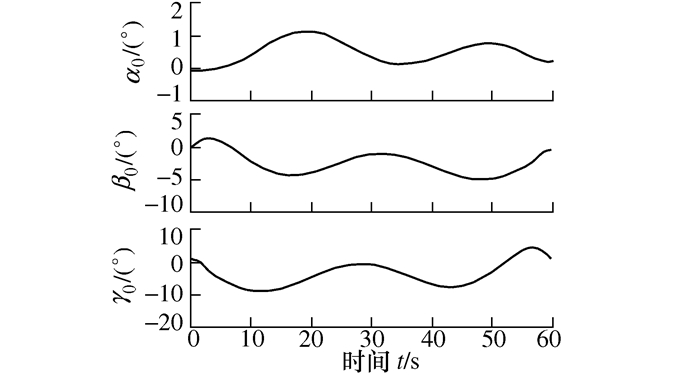
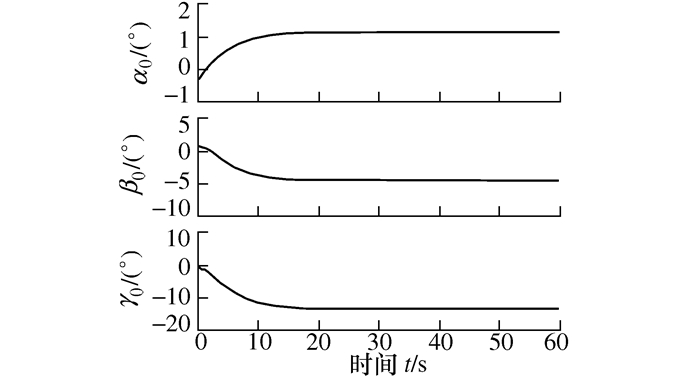
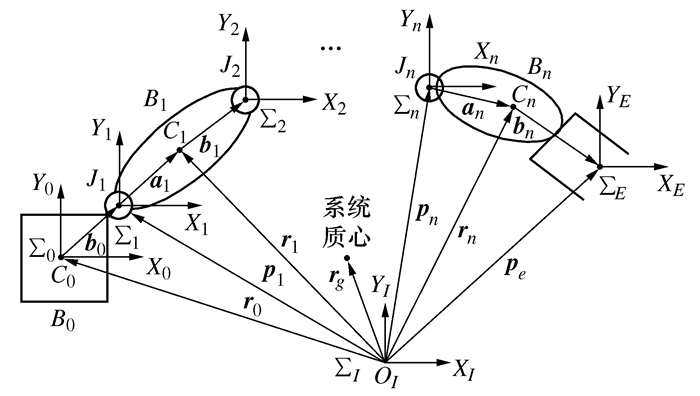
摘要: 针对自由漂浮状态下的6-DOF(degree of freedom)非完整冗余的空间机械臂系统在轨迹规划时平滑性和稳定性不足的问题,设计了一种改进布谷鸟搜索算法的轨迹规划策略。在空间机械臂一般模型的基础上建立其运动方程,根据基座姿态、机械臂关节角速度以及角加速度的约束条件构建了空间机械臂轨迹规划模型,通过改进布谷鸟搜索算法进行优化,实现轨迹规划的目标。仿真结果表明,在满足机械臂系统受限范围可使得关节的最终状态达到了期望状态,关节轨迹的平滑性得到了改善;并且能较好的克服机械臂运动对基座姿态的干扰,增强了机械臂系统运动的稳定性。Abstract: Because a free-floating 6-DOF nonholonomic redundant space manipulator cannot solve the smoothness and stability problem in path planning, an improved path planning strategy for cuckoo search algorithm is designed. On the basis of the general model of the space manipulator, this paper established the equation of motion according to the base attitude, angular velocity and angular acceleration constraints of a mechanical arm joint. It built the path planning model of the space manipulator to optimize the cuckoo search algorithm, thus achieving the purpose of path planning. The simulation results show that the strategy overcomes the constraints of the manipulator, makes the final state of the space joint reach the desired state and improves the smoothness of the path of the joint and that it can better overcome the interference of the manipulator's motion on the base attitude and enhance the manipulator's motion stability.
-
Key words:
- space manipulator /
- path planning /
- cuckoo search algorithm /
- optimization
-
[1] 史先鹏, 刘士荣.机械臂轨迹跟踪控制研究进展[J].控制工程, 2011, 18(1):116-122, 132 doi: 10.3969/j.issn.1671-7848.2011.01.029Shi X P, Liu S R. A survey of trajectory tracking control for robot manipulators[J]. Control Engineering of China, 2011, 18(1):116-122, 132(in Chinese) doi: 10.3969/j.issn.1671-7848.2011.01.029 [2] 党进, 倪风雷, 刘业超, 等.基于自适应模糊滑模的柔性机械臂控制[J].四川大学学报(工程科学版), 2011, 43(2):234-240 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201100260790Dang J, Ni F L, Liu Y C, et al. Adaptive fuzzy sliding mode control for flexible joint manipulators[J]. Journal of Sichuan University (Engineering Science Edition), 2011, 43(2):234-240(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201100260790 [3] 王三秀, 俞立, 徐建明, 等.机械臂自适应鲁棒轨迹跟踪控制[J].控制工程, 2015, 22(2):241-245 http://d.old.wanfangdata.com.cn/Periodical/jczdh201502007Wang S X, Yu L, Xu J M, et al. Adaptive robust tracking control for robotic manipulators[J]. Control Engineering of China, 2015, 22(2):241-245(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jczdh201502007 [4] Yoshida K, Hashizume K, Abiko S. Zero reaction maneuver: flight validation with ETS-VⅡ space robot and extension to kinematically redundant arm[C]//Proceedings 2001 ICRA. IEEE International Conference on Robotics and Automation (Cat. No.01CH37164). Seoul, South Korea: IEEE, 2001, 1: 441-446 [5] 刘宏, 刘宇, 姜力.空间机器人及其遥操作[M].哈尔滨:哈尔滨工业大学出版社, 2012Liu H, Liu Y, Jiang L. Space robot and teleoperation[M]. Harbin:Harbin Institute of Technology Press, 2012(in Chinese) [6] 张福海, 付宜利, 王树国.一种笛卡儿空间的自由漂浮空间机器人路径规划方法[J].机器人, 2009, 31(2):187-192 doi: 10.3321/j.issn:1002-0446.2009.02.014Zhang F H, Fu Y L, Wang S G. A path planning method for free-floating space robot in Cartesian space[J]. Robot, 2009, 31(2):187-192(in Chinese) doi: 10.3321/j.issn:1002-0446.2009.02.014 [7] 王明, 黄攀峰, 常海涛, 等.基于机械臂耦合力矩评估的组合航天器姿态协调控制[J].机器人, 2015, 37(1):25-34 doi: 10.3969/j.issn.1004-6437.2015.01.011Wang M, Huang P F, Chang H T, et al. Coordinated attitude control of combined spacecraft based on estimated coupling torque of manipulator[J]. Robot, 2015, 37(1):25-34(in Chinese) doi: 10.3969/j.issn.1004-6437.2015.01.011 [8] 杨辉华, 谢谱模, 张晓凤, 等.求解多目标优化问题的改进布谷鸟搜索算法[J].浙江大学学报(工学版), 2015, 49(8):1600-1608 http://d.old.wanfangdata.com.cn/Periodical/zjdxxb-gx201508028Yang H H, Xie P M, Zhang X F, et al. Improved cuckoo search algorithm for multi-objective optimization problems[J]. Journal of Zhejiang University (Engineering Science), 2015, 49(8):1600-1608(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/zjdxxb-gx201508028 [9] 曾岑.在轨服务空间机械臂运动及任务规划方法研究[D].大连: 大连理工大学, 2013 http://cdmd.cnki.com.cn/Article/CDMD-10141-1014154469.htmZeng C. Research on motion and mission planning methods for on-orbit service space manipulator[D]. Dalian: Dalian University of Technology, 2013(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10141-1014154469.htm [10] Liu H D, Liang B, Wang X Q, et al. Autonomous path planning and experiment study of free-floating space robot for spinning satellite capturing[C]//Proceedings of the 13th International Conference on Control Automation Robotics & Vision. Singapore: IEEE, 2014: 1573-1580 [11] 蔡自兴, 谢斌.机器人学[M]. 3版.北京:清华大学出版社, 2015Cai Z X, Xie B. Robotics[M]. 3rd ed. Beijing:Tsinghua University Press, 2015(in Chinese) [12] Zhang J X, Wei X P, Zhou D S, et al. Trajectory planning of a redundant space manipulator based on improved hybrid PSO algorithm[C]//Proceedings of 2016 IEEE International Conference on Robotics and Biomimetics. Qingdao: IEEE, 2016: 419-425 [13] Mu Z G, Zhang B, Xu W F, et al. Fault tolerance kinematics and trajectory planning of a 6-DOF space manipulator under a single joint failure[C]//Proceedings of 2016 IEEE International Conference on Real-time Computing and Robotics. Angkor Wat: IEEE, 2016: 483-488 [14] 夏红伟, 翟彦斌, 马广程, 等.基于混沌粒子群优化算法的空间机械臂轨迹规划算法[J].中国惯性技术学报, 2014, 22(2):211-216 http://d.old.wanfangdata.com.cn/Periodical/zggxjsxb201402013Xia H W, Zhai Y B, Ma G C, et al. Path planning algorithm of space manipulator based on chaos particle swarm optimization algorithm[J]. Journal of Chinese Inertial Technology, 2014, 22(2):211-216(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/zggxjsxb201402013 [15] 赵玉新, Yang X S, 刘利强.新兴元启发式优化方法[M].北京:科学出版社, 2013Zhao Y X, Yang X S, Liu L Q. The emerging meta heuristic optimization method[M]. Beijing:Science Press, 2013(in Chinese) -

 下载:
下载:


 点击查看大图
点击查看大图
图(9)
计量
- 文章访问数: 796
- HTML全文浏览量: 166
- PDF下载量: 400
- 被引次数: 0
