作者中心
作者中心 编辑办公
编辑办公 专家审稿
专家审稿 主编办公
主编办公
 邮件订阅
邮件订阅 RSS
RSS
2023年 42卷 第3期
2023, 42(3): 329-337.
doi: 10.13433/j.cnki.1003-8728.20200589
 摘要
摘要 HTML
HTML PDF 2220KB
PDF 2220KB
摘要:
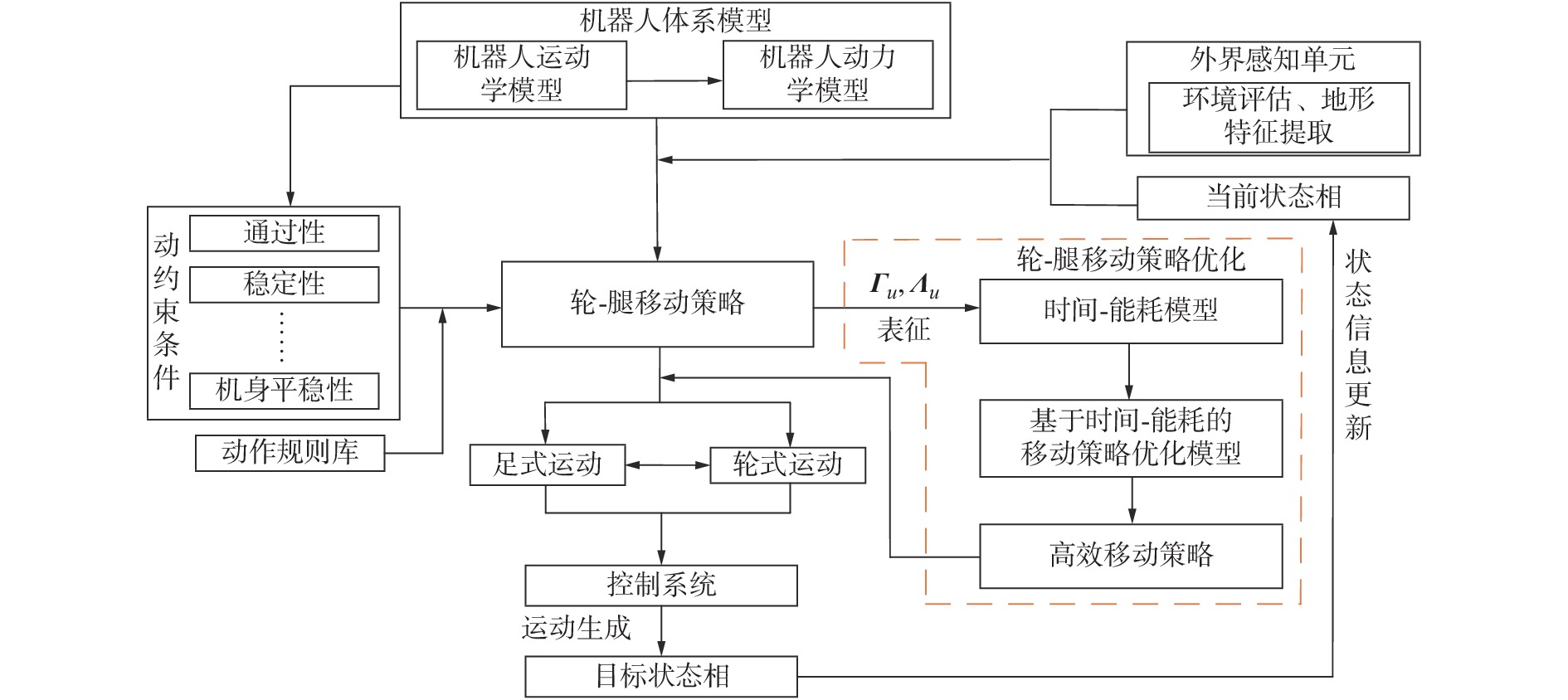
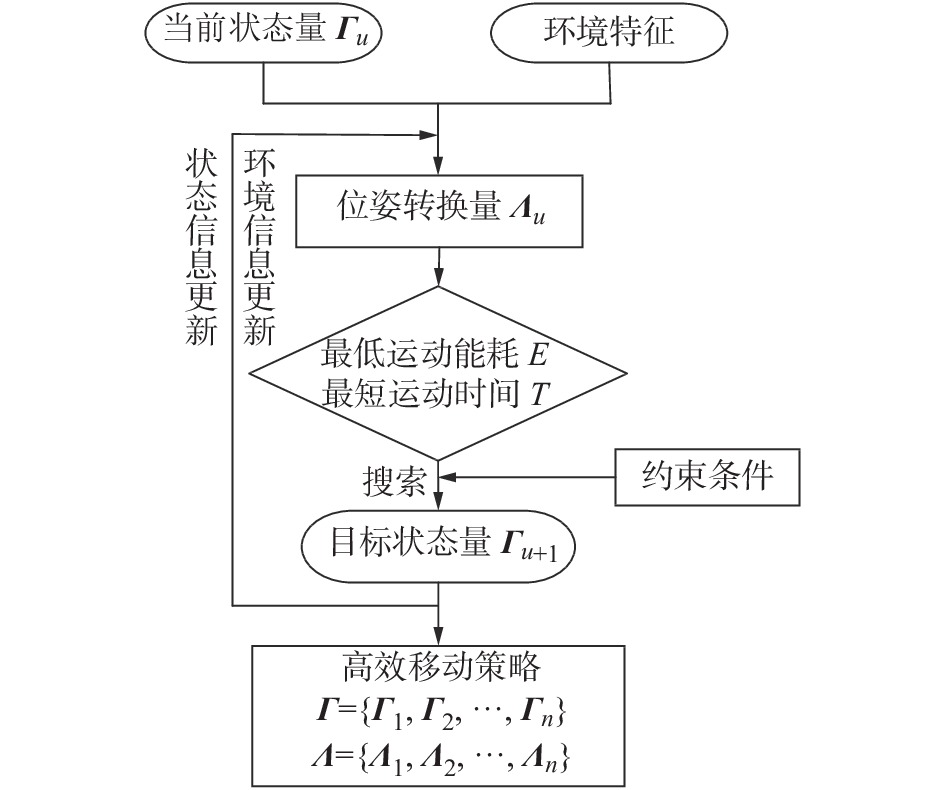
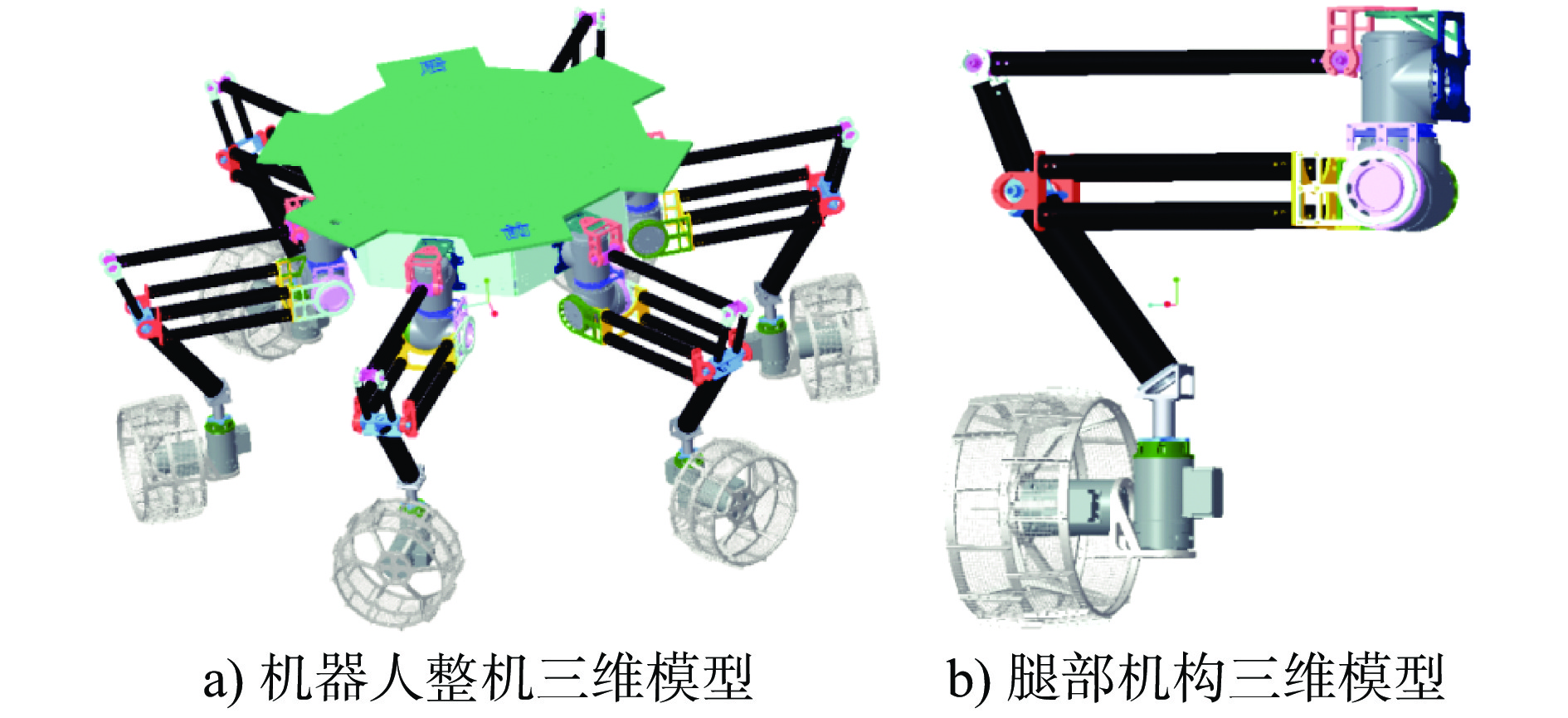
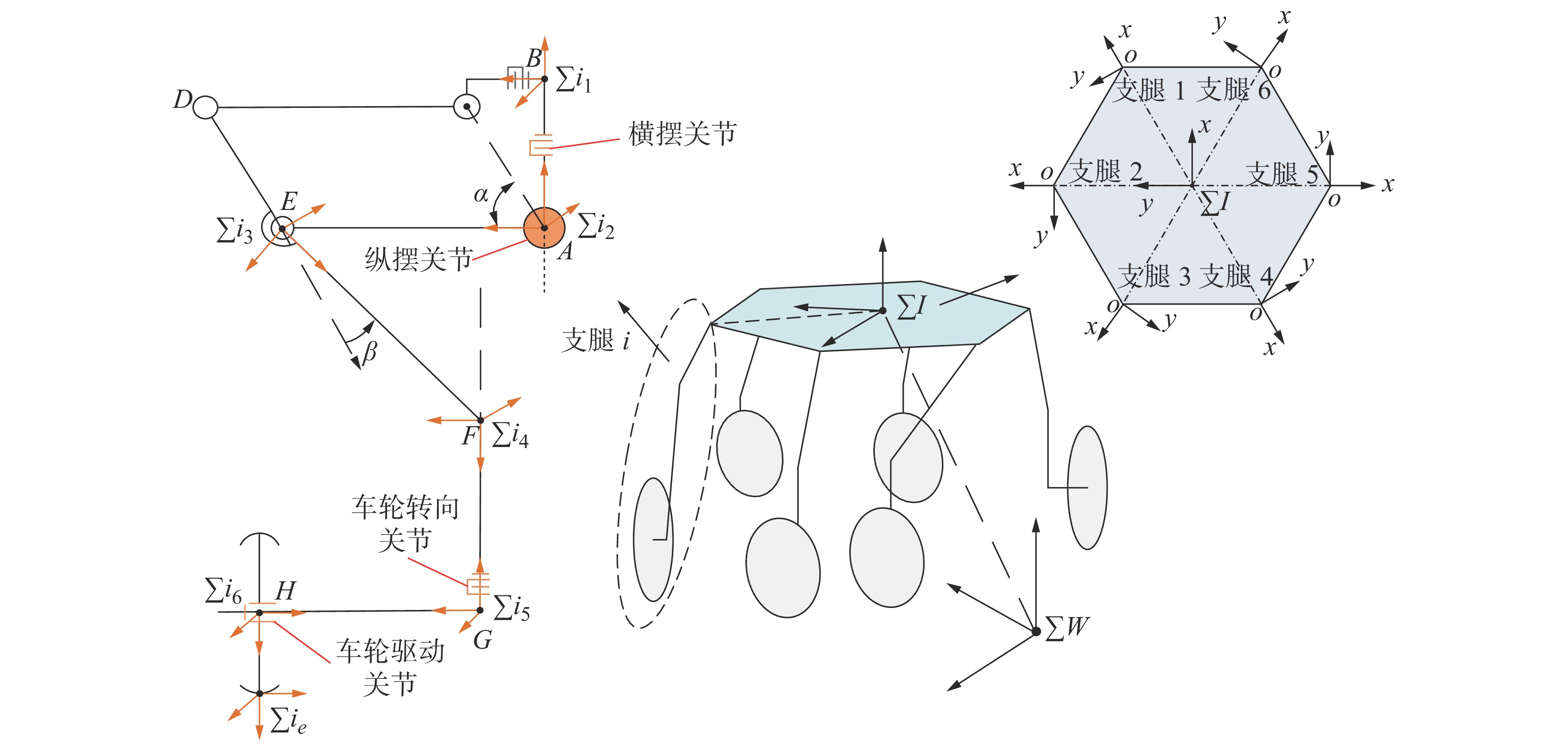
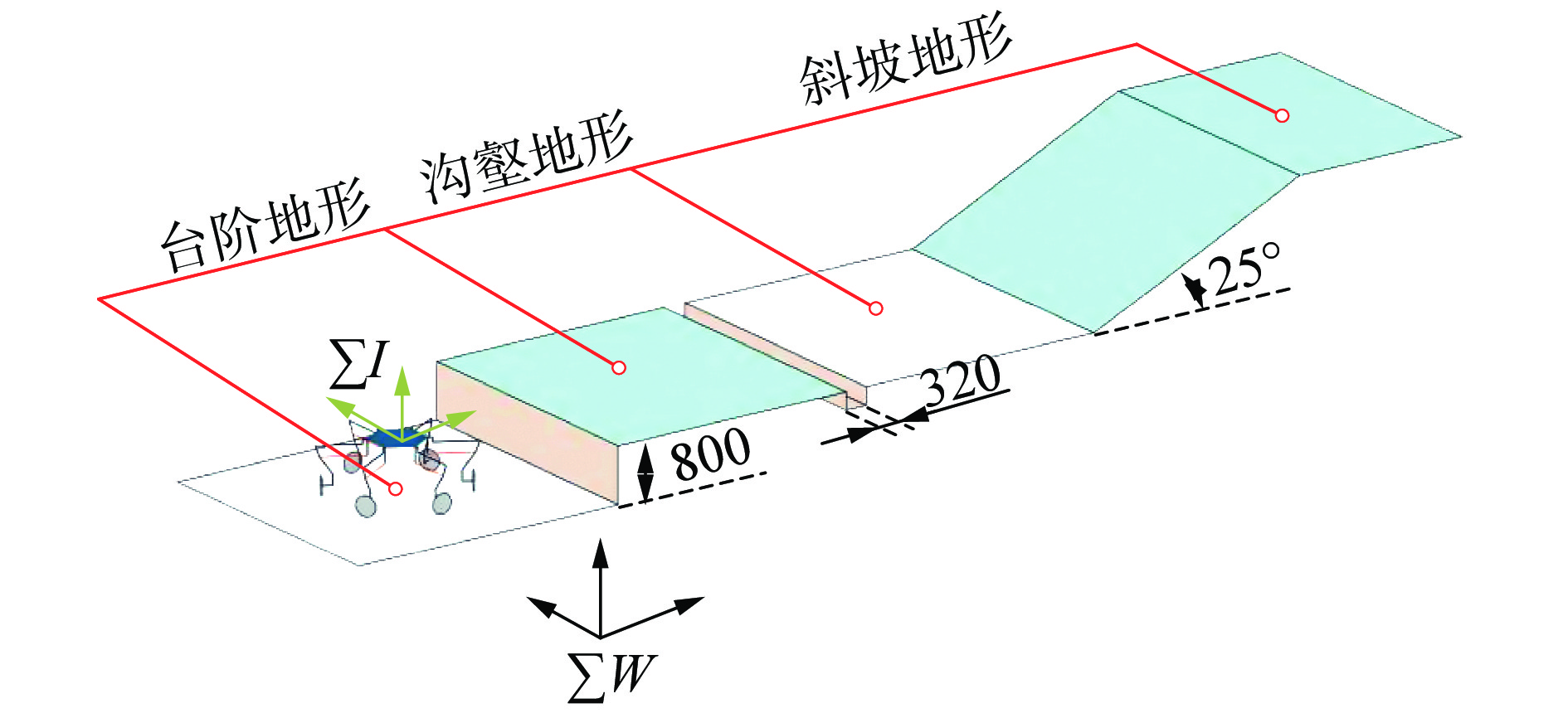
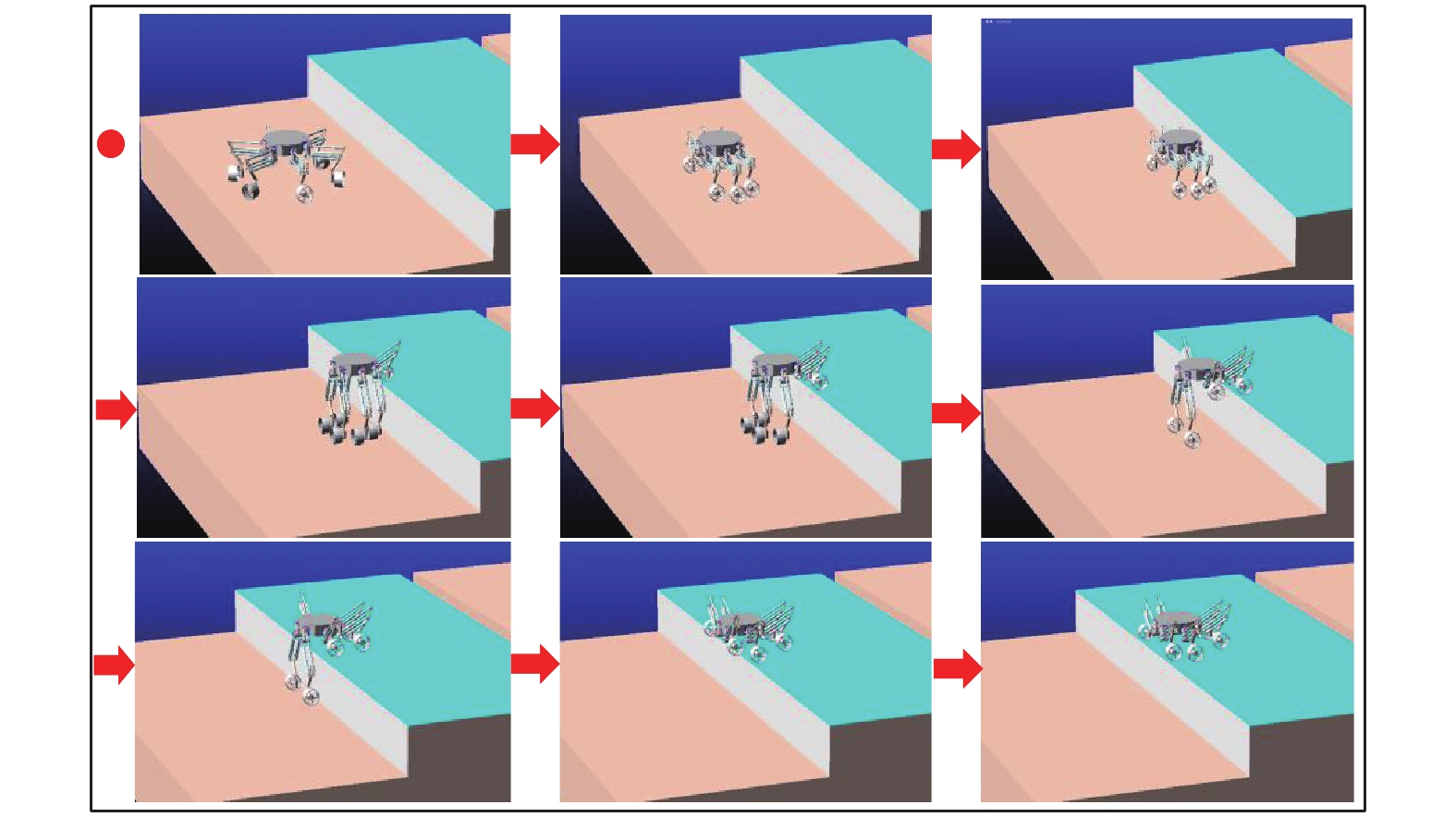
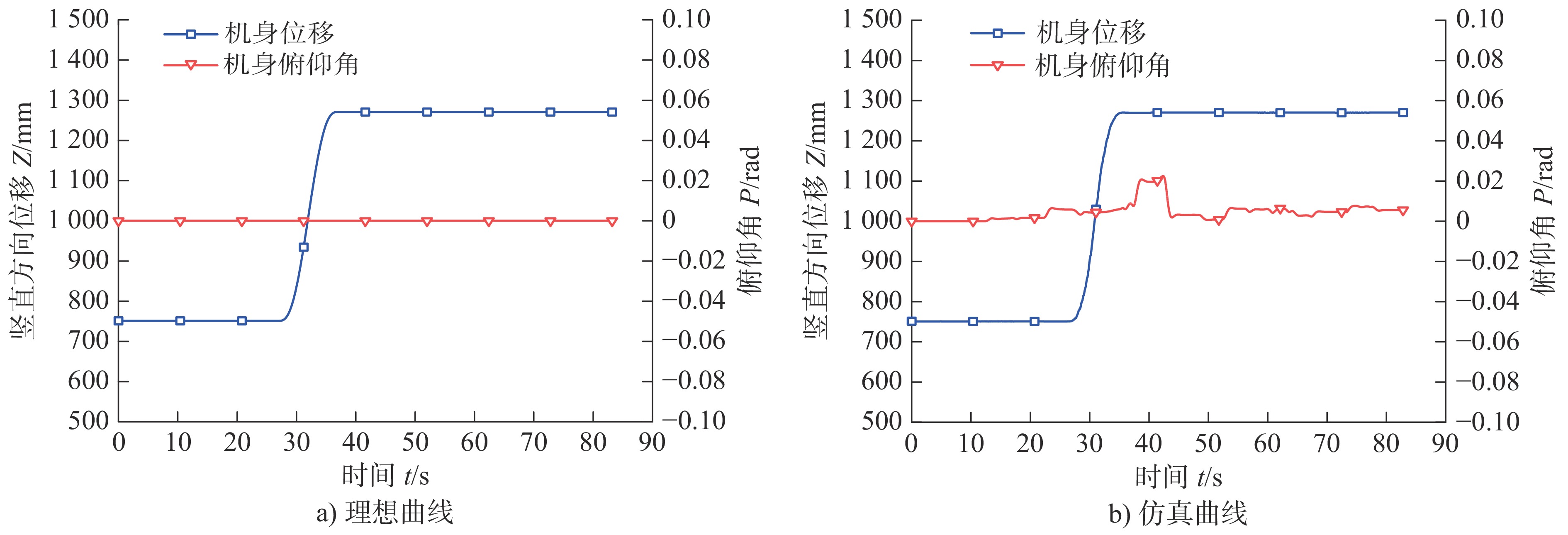
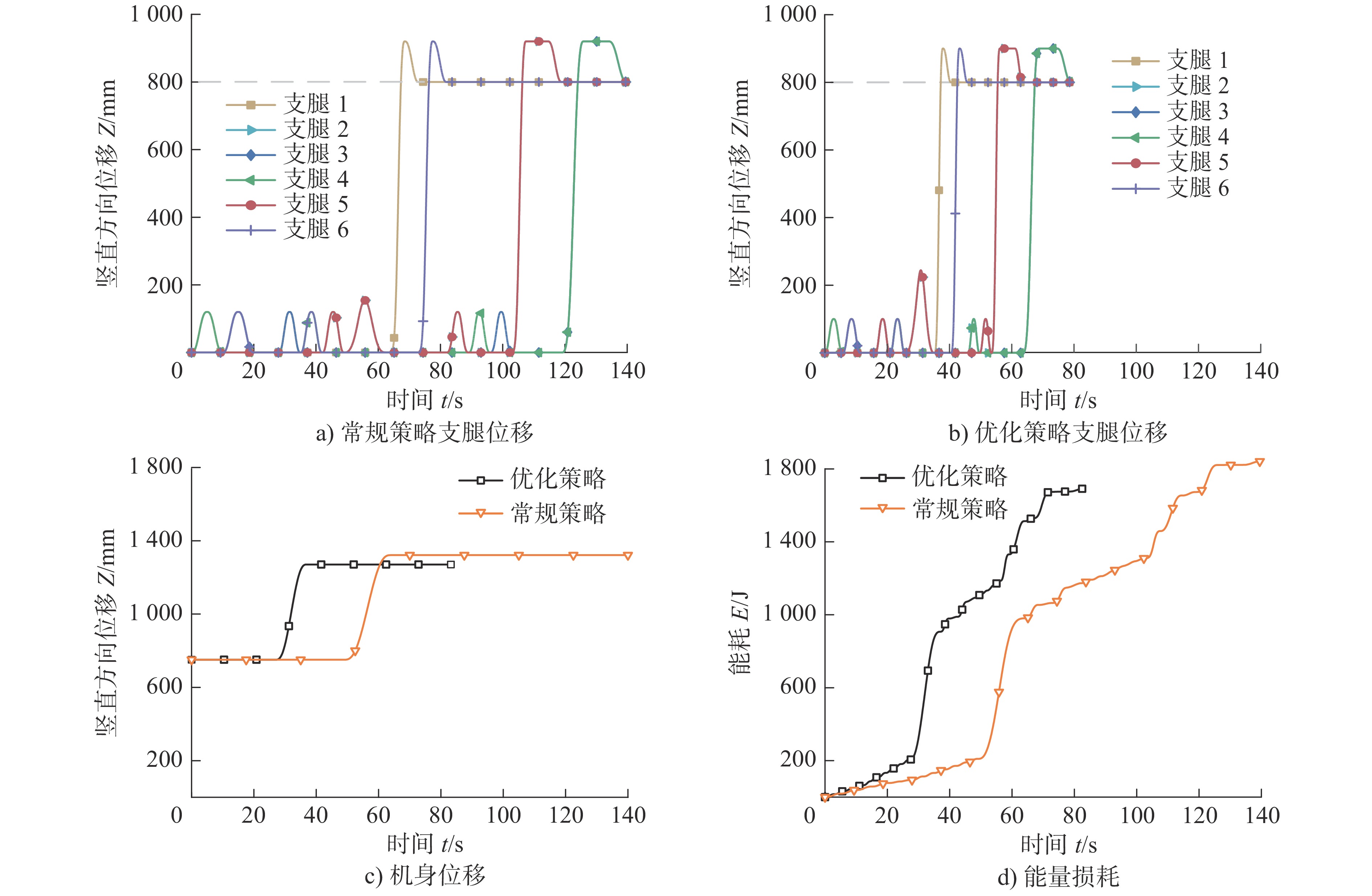
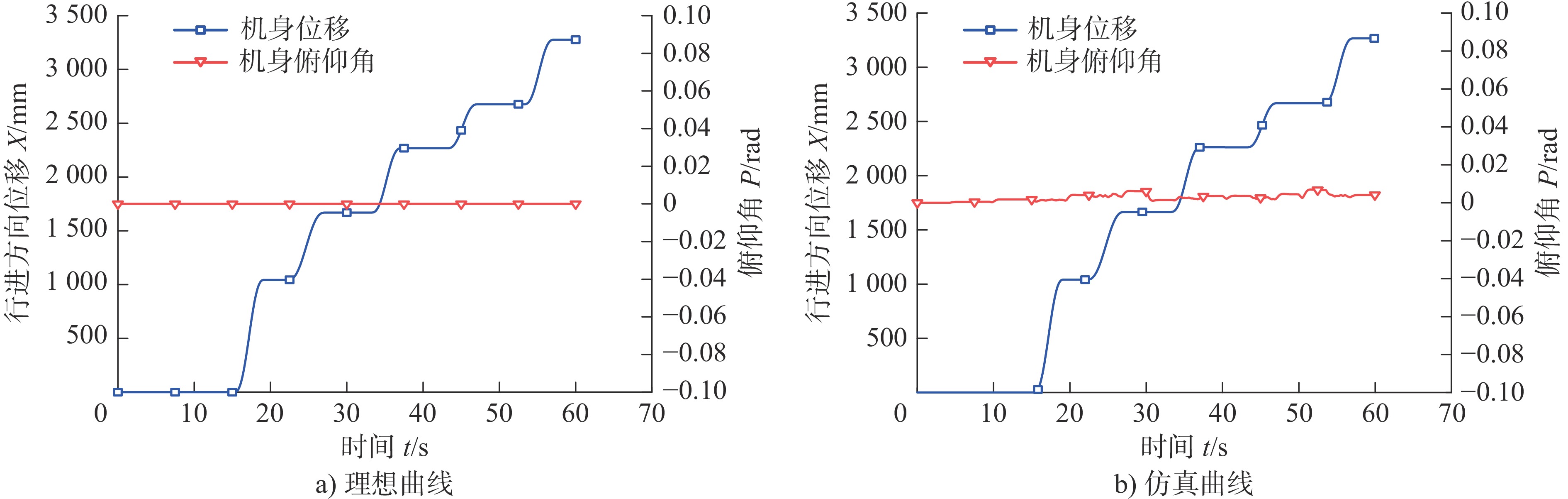
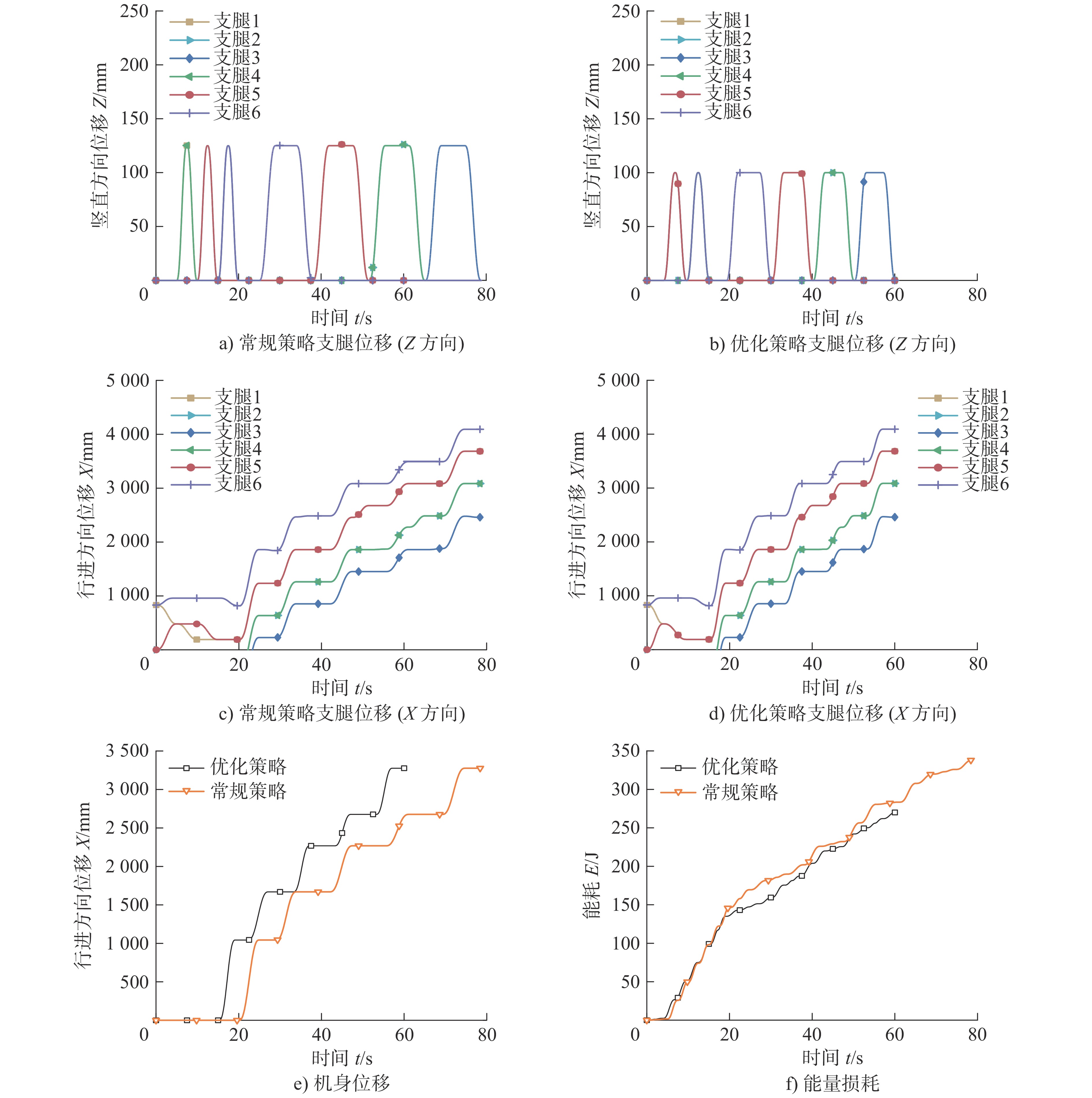
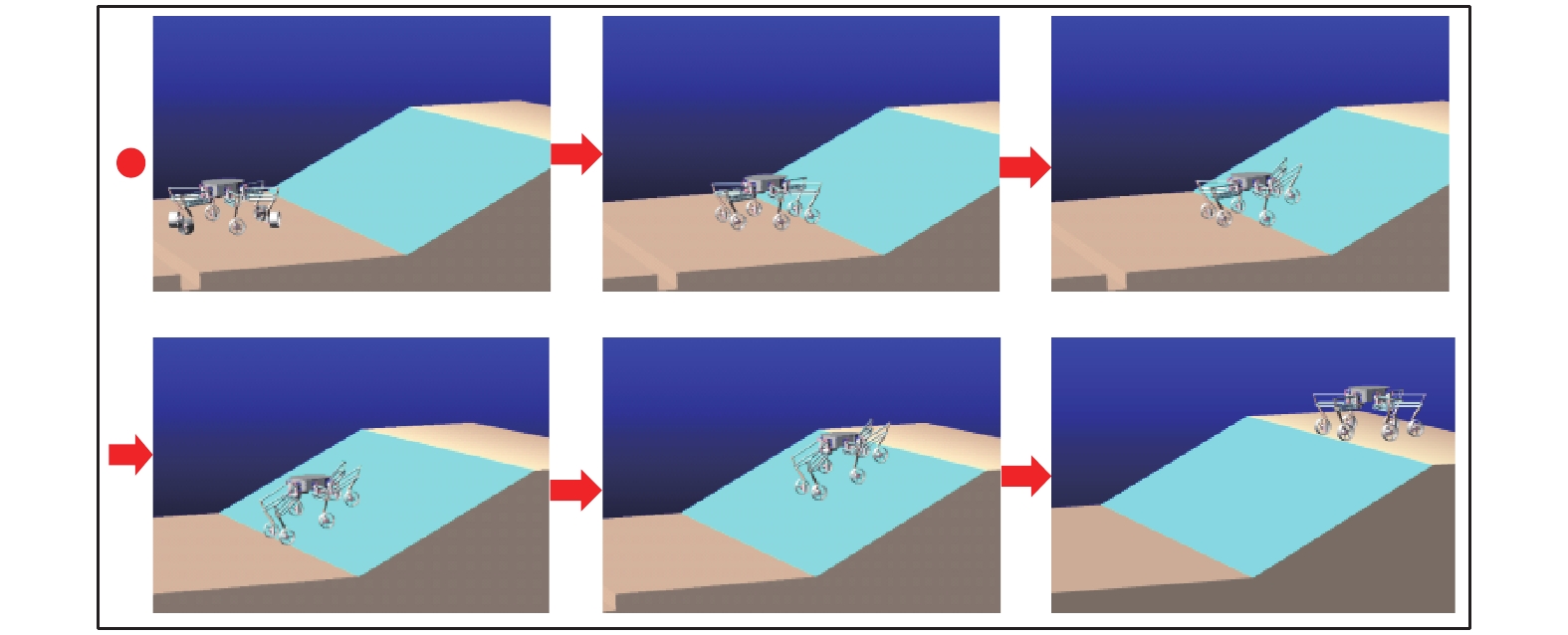
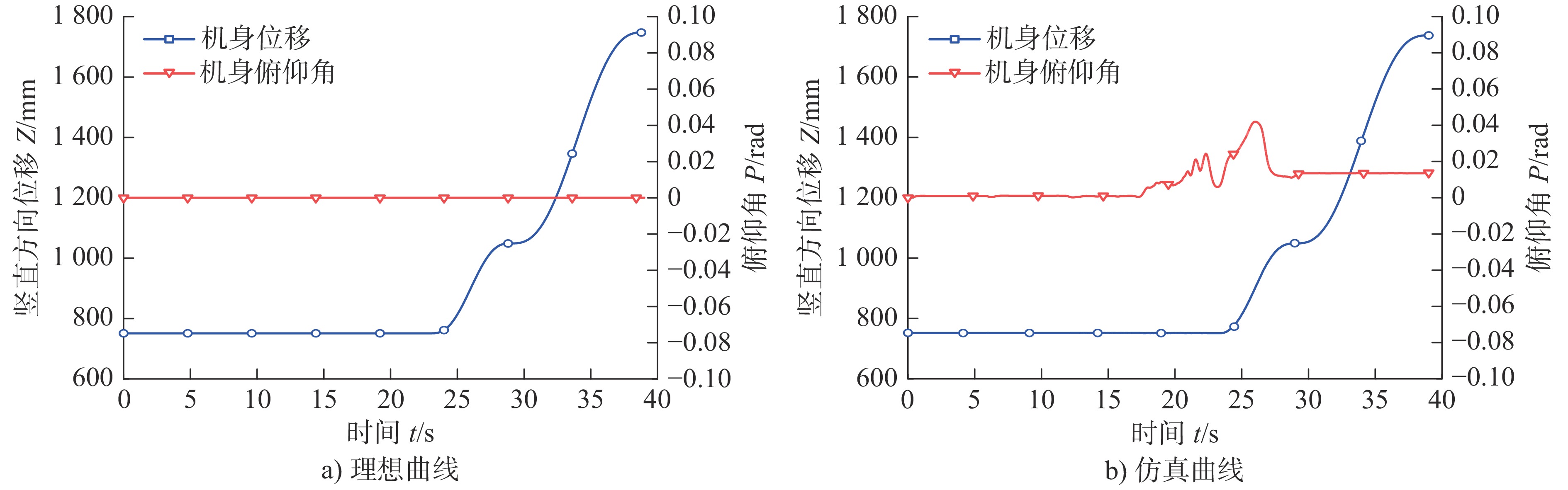
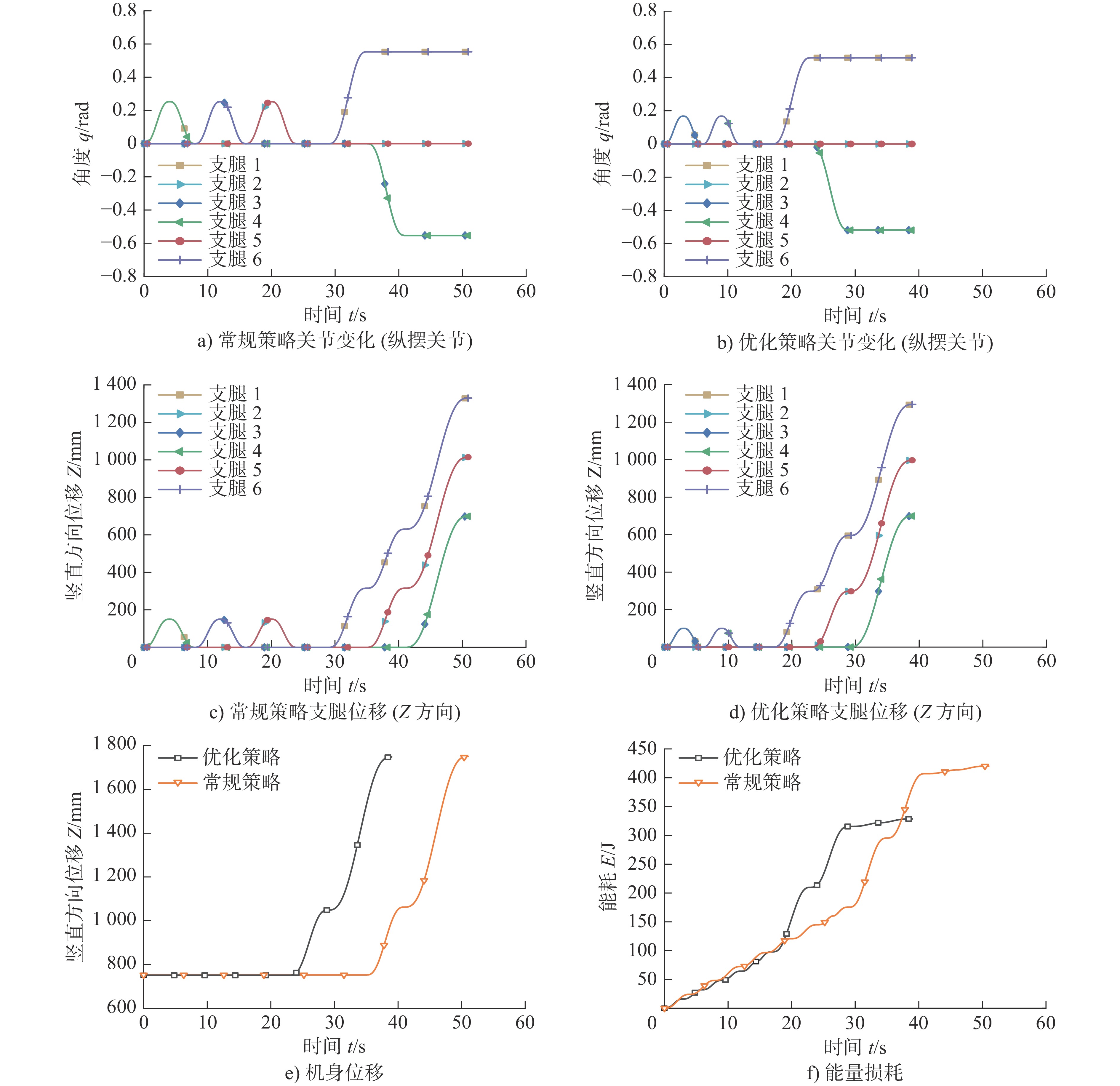
复杂地形下的高效移动策略是轮腿式机器人研制过程中的技术难点。本文在常规移动策略的基础上,通过引入关节空间状态量描述支腿相对于机身的位姿,引入位姿转换量描述相邻时序的位姿状态量间的运动过程,进而建立起移动策略与时间和能耗的数学模型,并以移动时间最短和能耗最低为目标,建立了移动策略的优化模型,通过优化迭代形成轮-腿高效移动策略。复杂地形下的越障仿真表明,机器人采用轮-腿高效移动策略可实现越障功能,与常规移动策略相比,移动时间及能耗均明显降低,验证了轮-腿高效移动策略的有效性。
复杂地形下的高效移动策略是轮腿式机器人研制过程中的技术难点。本文在常规移动策略的基础上,通过引入关节空间状态量描述支腿相对于机身的位姿,引入位姿转换量描述相邻时序的位姿状态量间的运动过程,进而建立起移动策略与时间和能耗的数学模型,并以移动时间最短和能耗最低为目标,建立了移动策略的优化模型,通过优化迭代形成轮-腿高效移动策略。复杂地形下的越障仿真表明,机器人采用轮-腿高效移动策略可实现越障功能,与常规移动策略相比,移动时间及能耗均明显降低,验证了轮-腿高效移动策略的有效性。



2023, 42(3): 338-344.
doi: 10.13433/j.cnki.1003-8728.20200629
摘要:
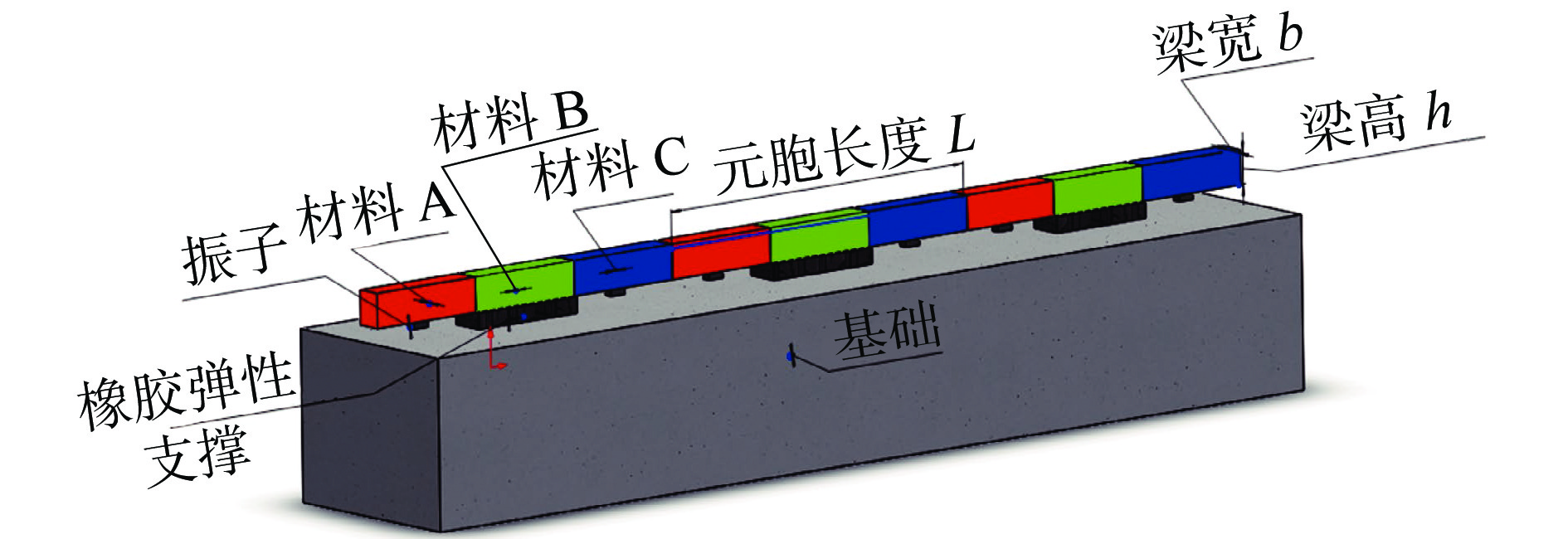
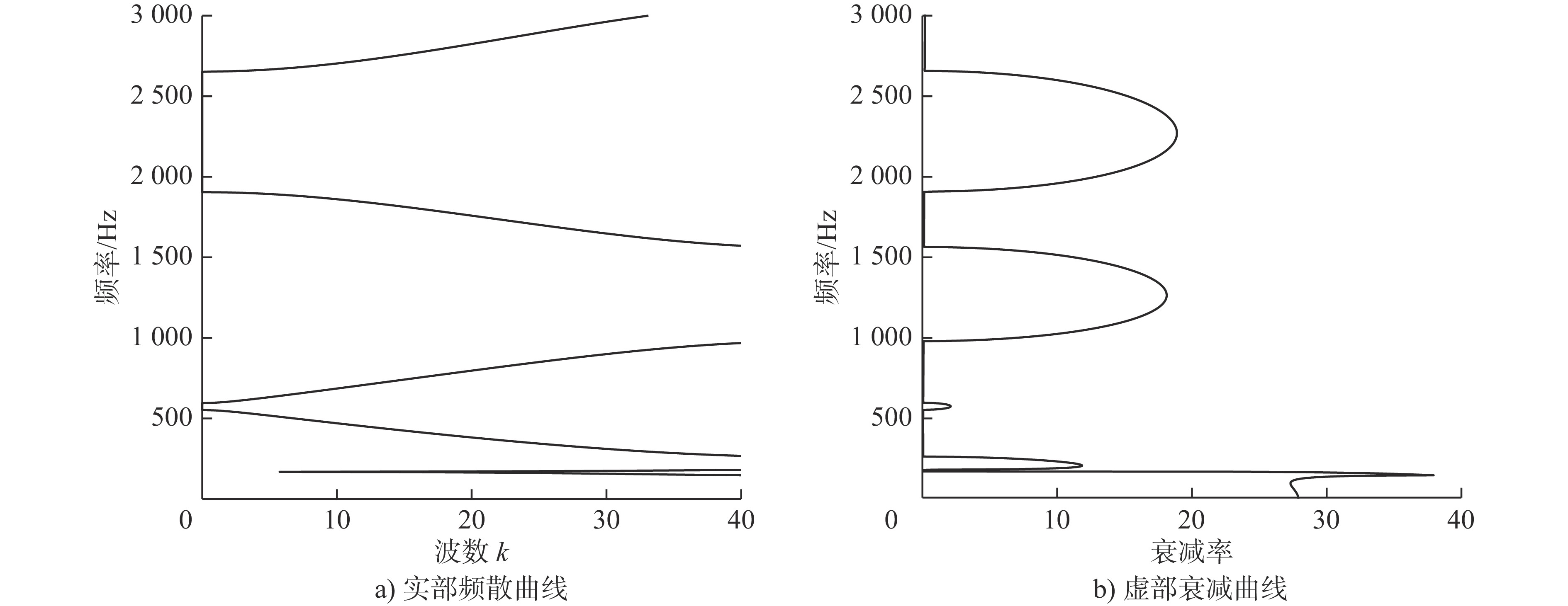
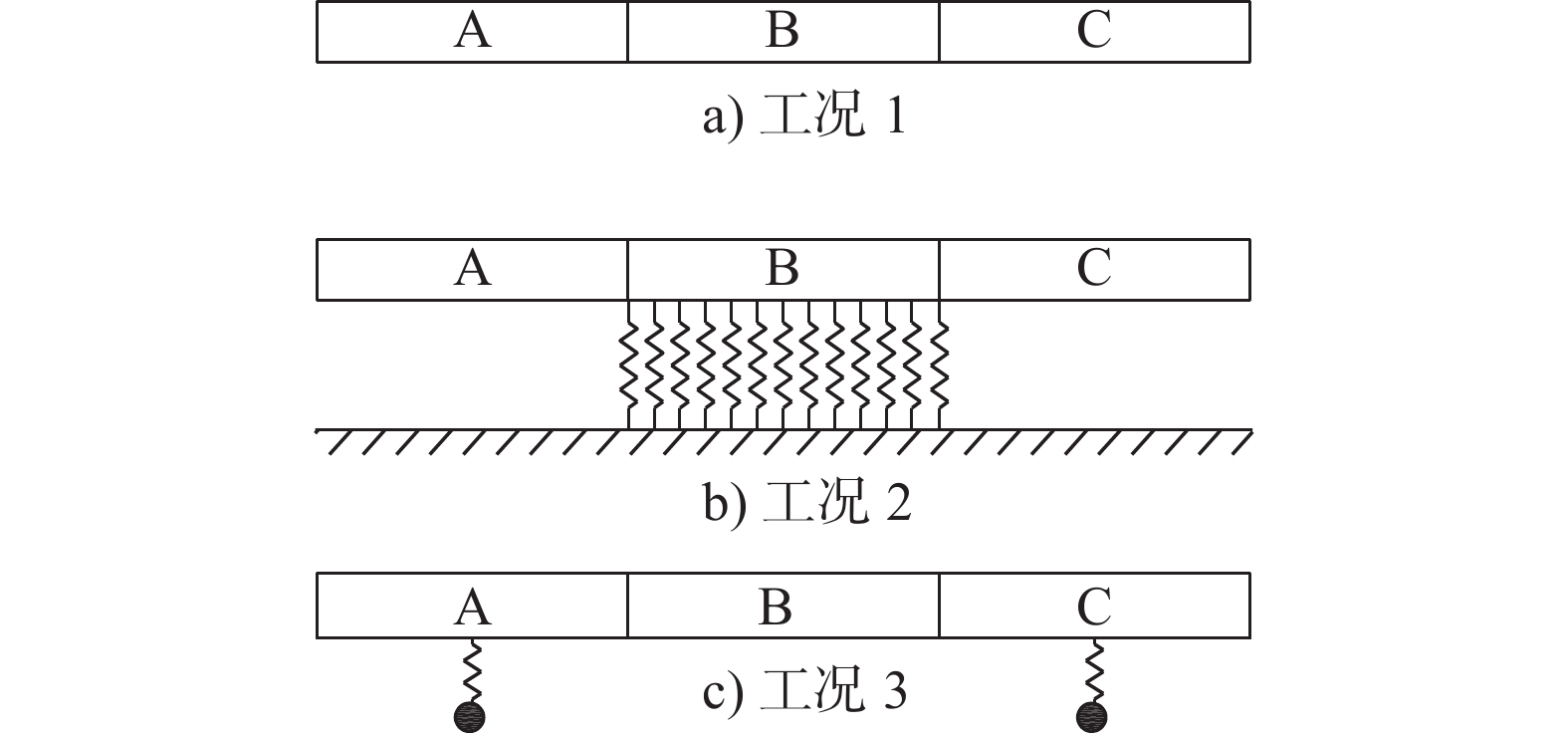
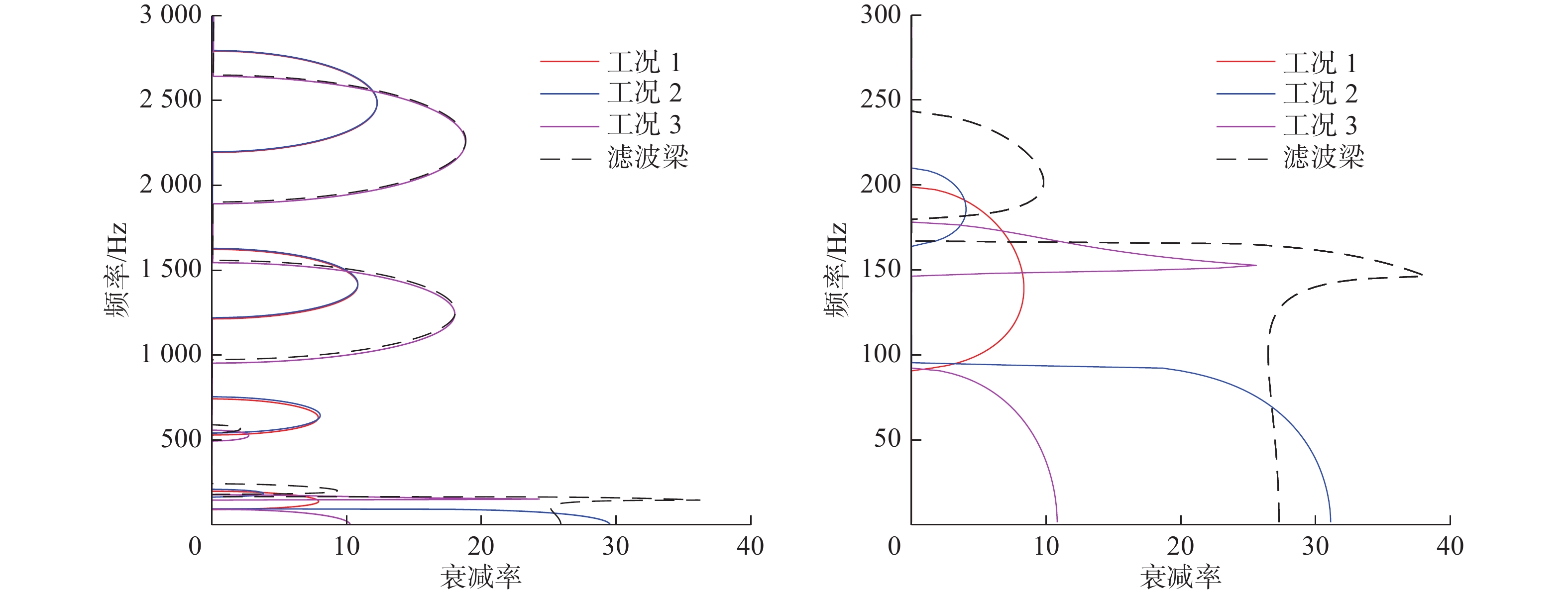
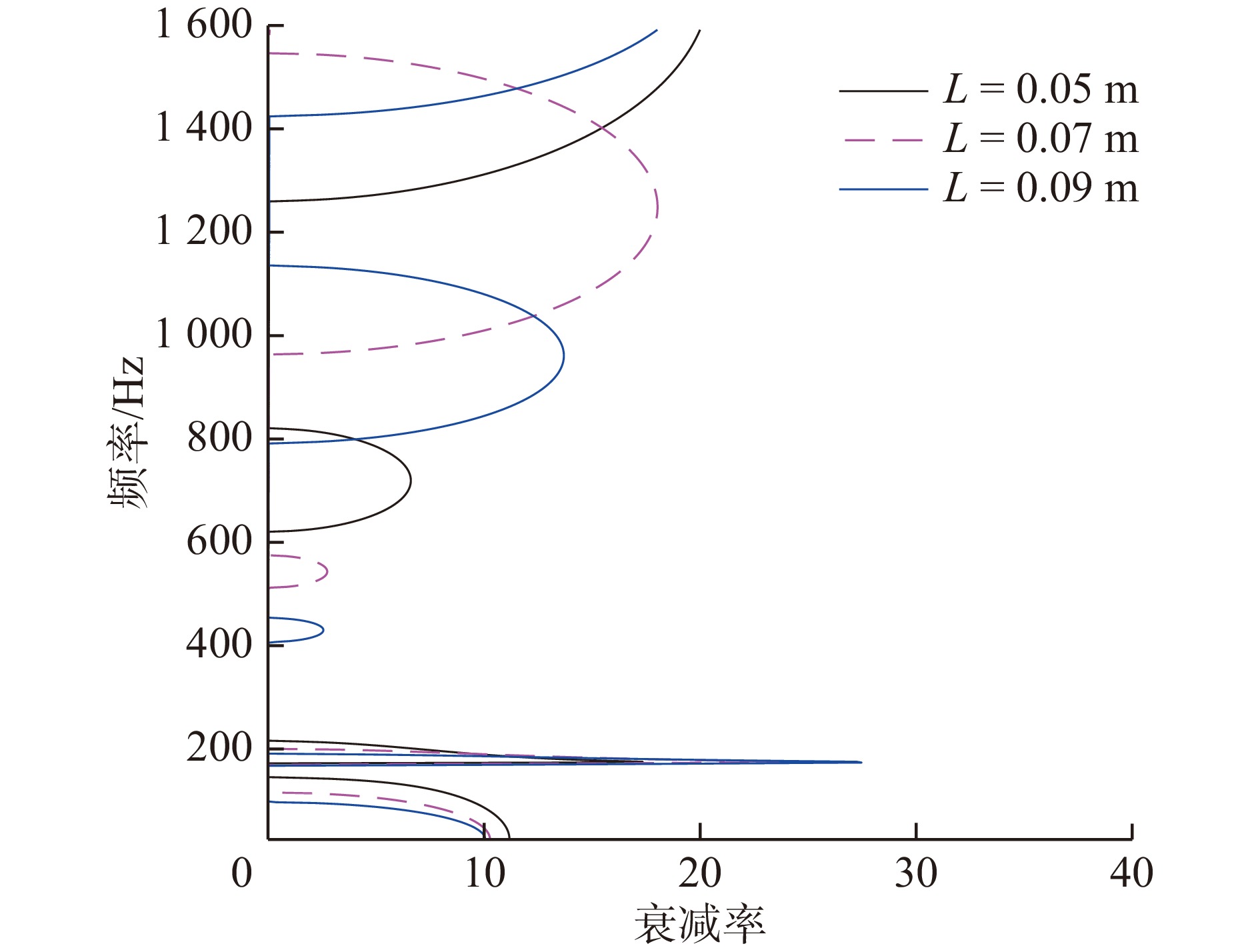
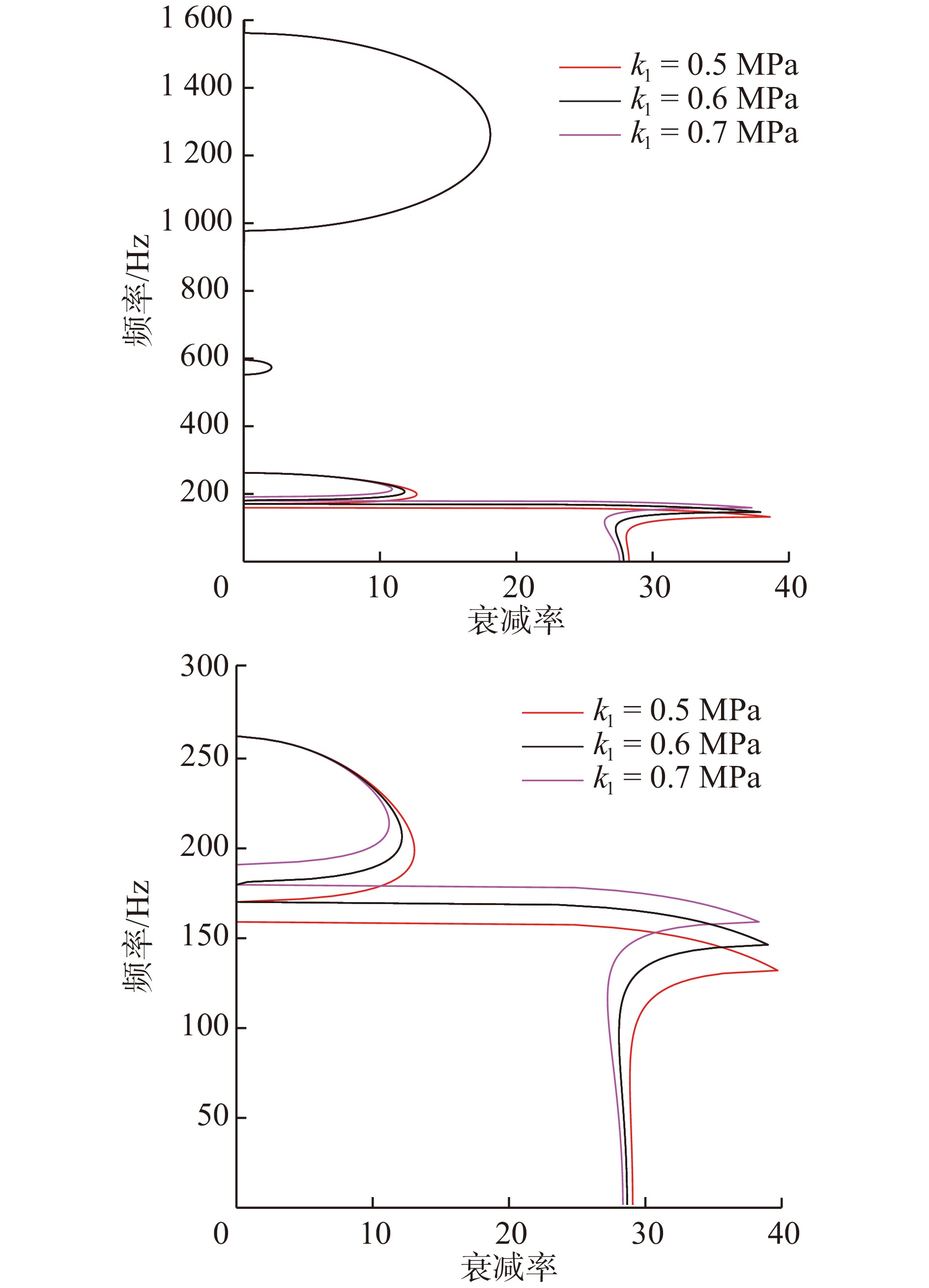
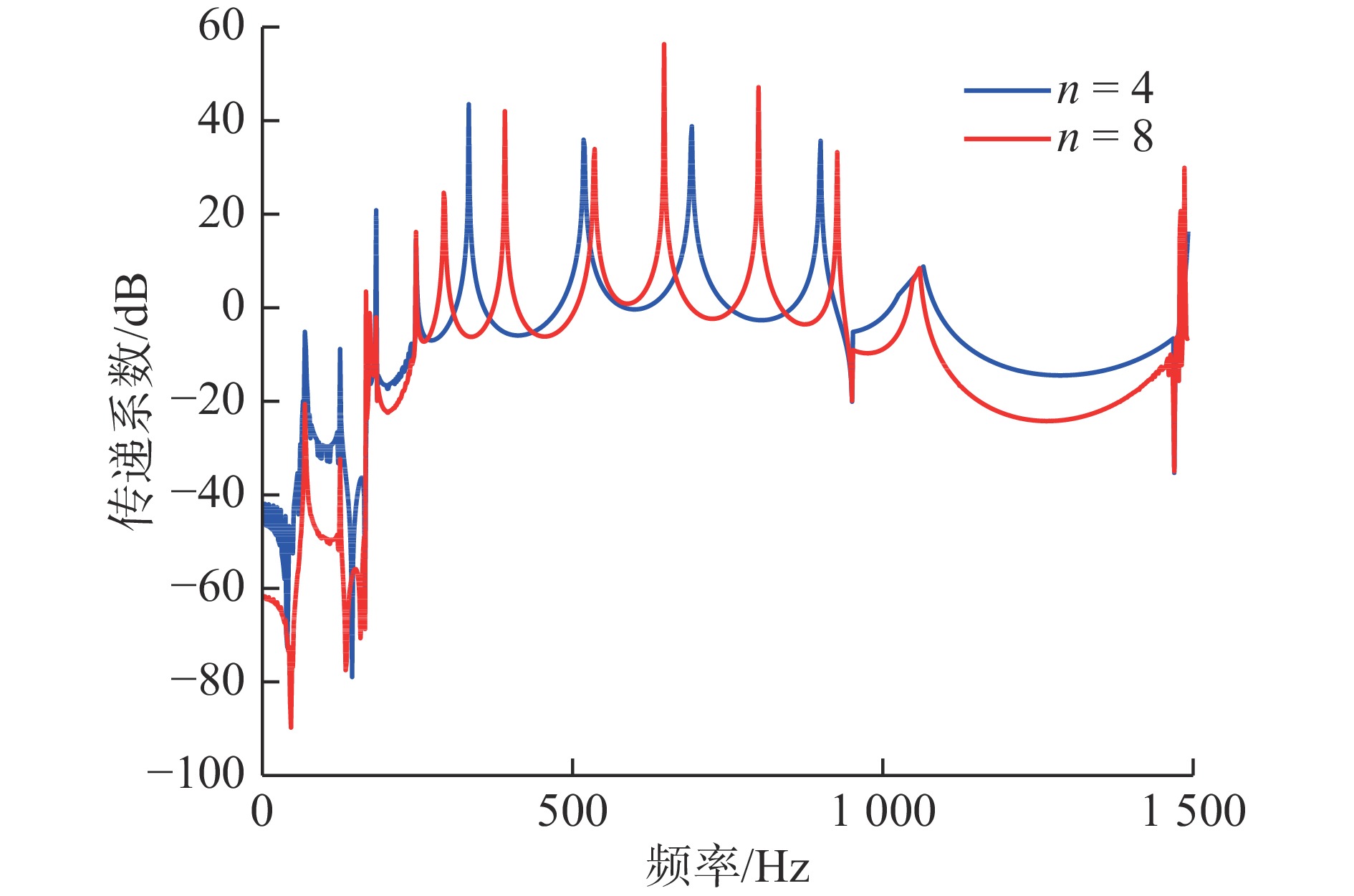
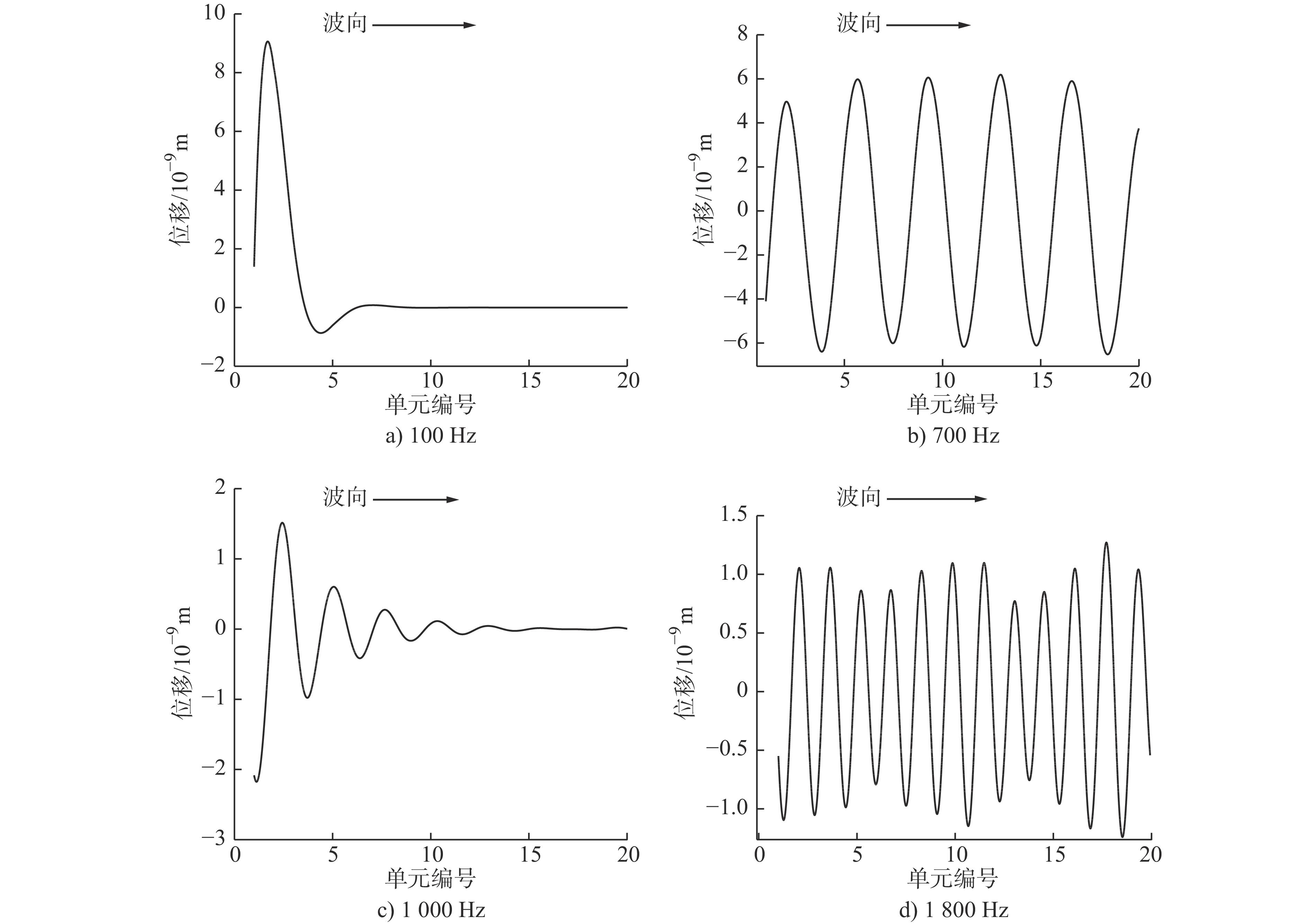
提出了一种包含Bragg散射、整体局域共振和局部局域共振机理的多带隙联合声子晶体滤波梁,通过传递矩阵法与Bloch定理求得无限周期结构各阶带隙为0 ~ 170 Hz、180 ~ 262.6 Hz、552.3 ~ 597 Hz、974 ~ 1 563 Hz、1 903 ~ 2 667 Hz;并调节结构参数,得出带隙调制规律和带隙机理。同时,与其他3种工况声子晶体梁带隙特征进行对比分析,证明了声子晶体滤波梁在带隙宽度、丰富度以及弹性波衰减率方面均有着相对优势,具备更好的过滤或抑制结构中弹性波的性能。此外,求解近声子晶体滤波梁的振动传递系数,得出在各阶带隙范围内,弹性波的传播存在明显衰减,验证了带隙的存在。最后为探究弹性波在带隙/通带范围内的波动模式,分别提取位于带隙/通带范围梁体位移分布,发现在带隙频率范围内的弹性波沿波动方向快速衰减,表现出带隙特性;通带频率范围内的弹性波无明显变化或衰减,表现出通带特性。
提出了一种包含Bragg散射、整体局域共振和局部局域共振机理的多带隙联合声子晶体滤波梁,通过传递矩阵法与Bloch定理求得无限周期结构各阶带隙为0 ~ 170 Hz、180 ~ 262.6 Hz、552.3 ~ 597 Hz、974 ~ 1 563 Hz、1 903 ~ 2 667 Hz;并调节结构参数,得出带隙调制规律和带隙机理。同时,与其他3种工况声子晶体梁带隙特征进行对比分析,证明了声子晶体滤波梁在带隙宽度、丰富度以及弹性波衰减率方面均有着相对优势,具备更好的过滤或抑制结构中弹性波的性能。此外,求解近声子晶体滤波梁的振动传递系数,得出在各阶带隙范围内,弹性波的传播存在明显衰减,验证了带隙的存在。最后为探究弹性波在带隙/通带范围内的波动模式,分别提取位于带隙/通带范围梁体位移分布,发现在带隙频率范围内的弹性波沿波动方向快速衰减,表现出带隙特性;通带频率范围内的弹性波无明显变化或衰减,表现出通带特性。


2023, 42(3): 345-351.
doi: 10.13433/j.cnki.1003-8728.20200581
摘要:
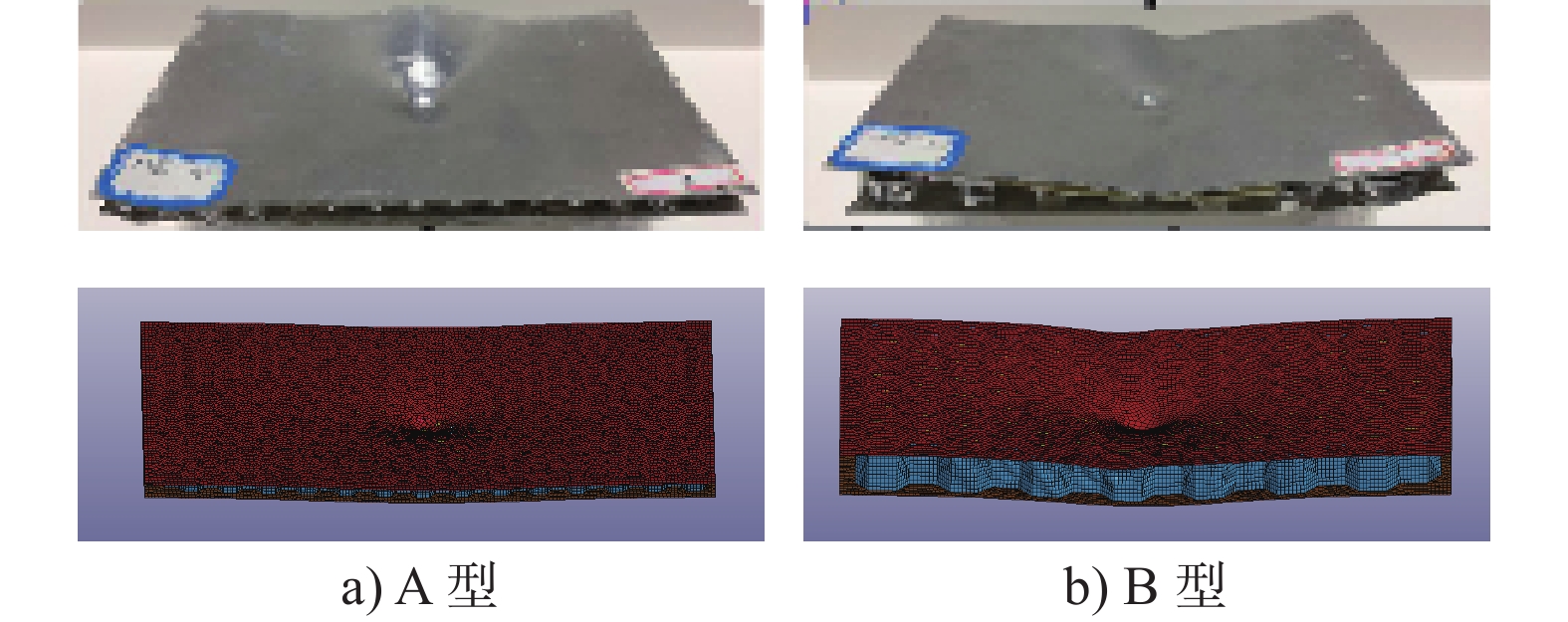
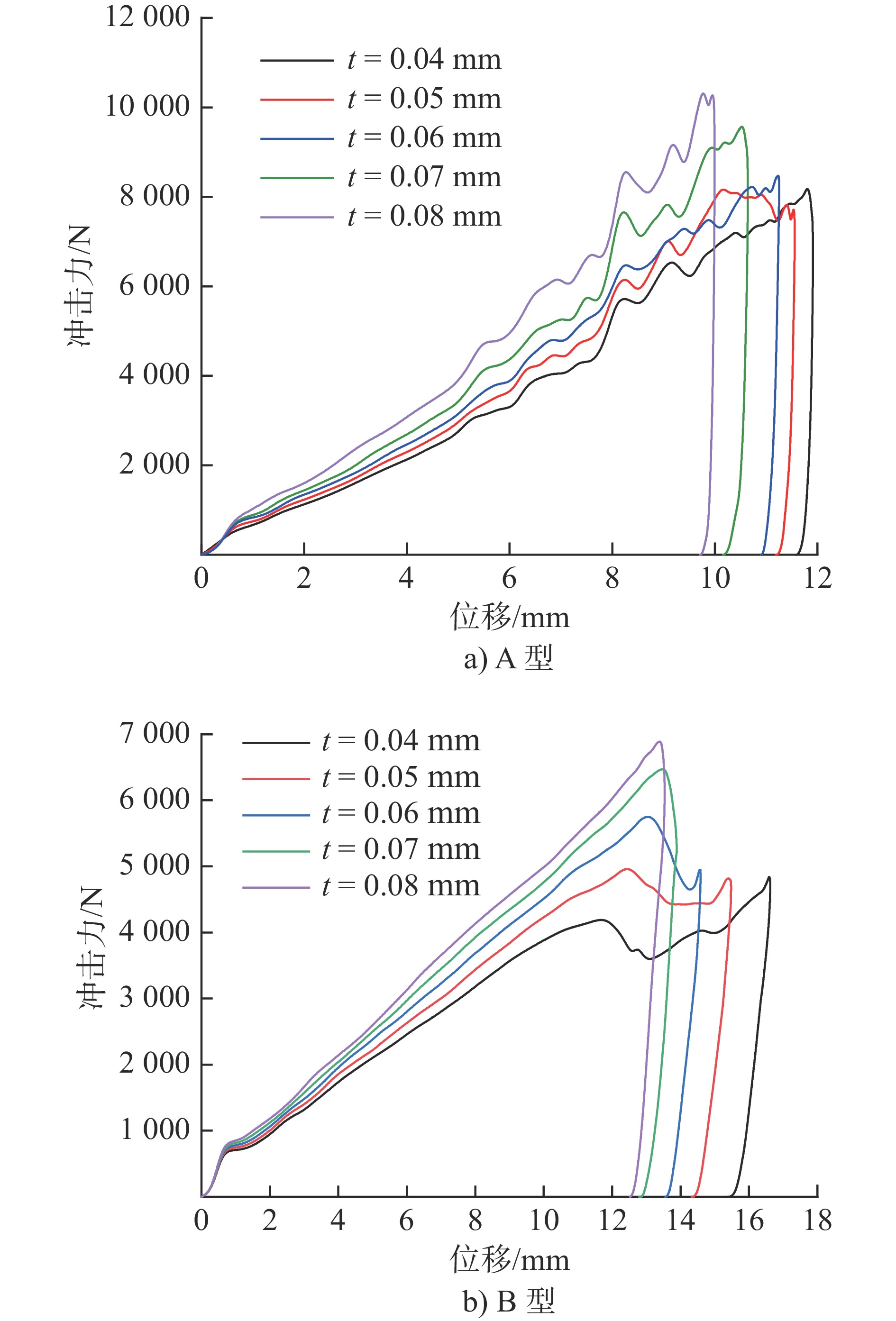
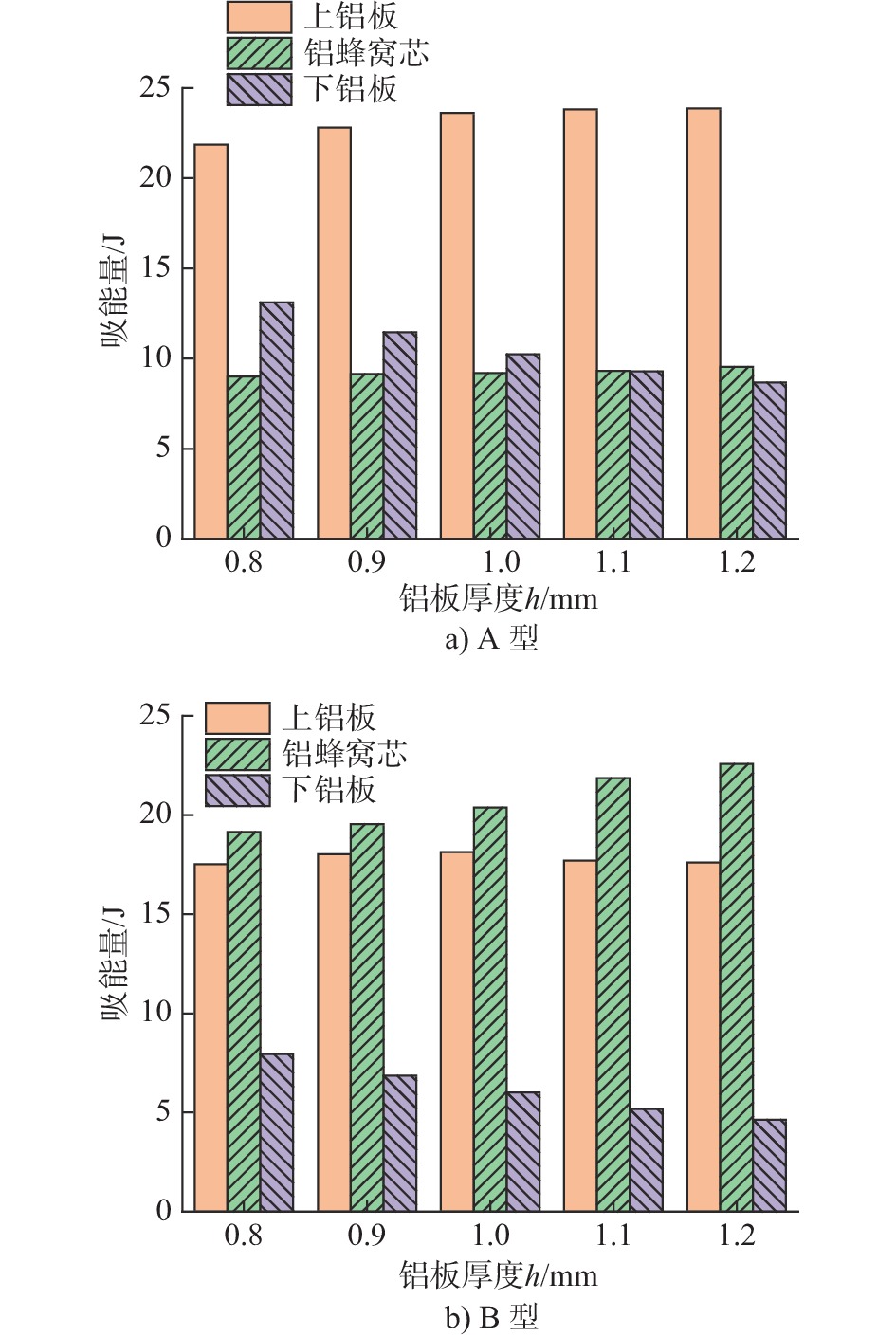
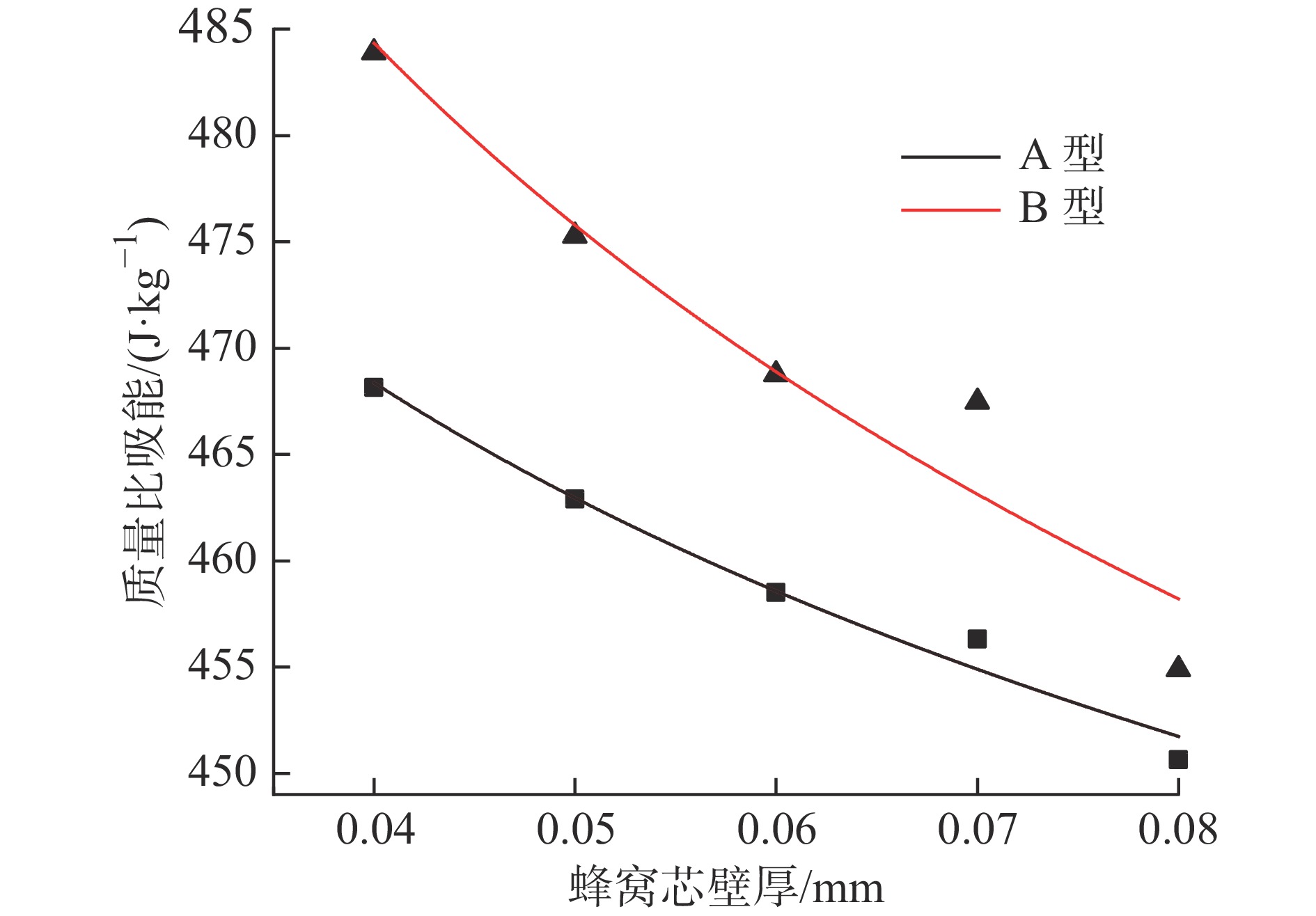
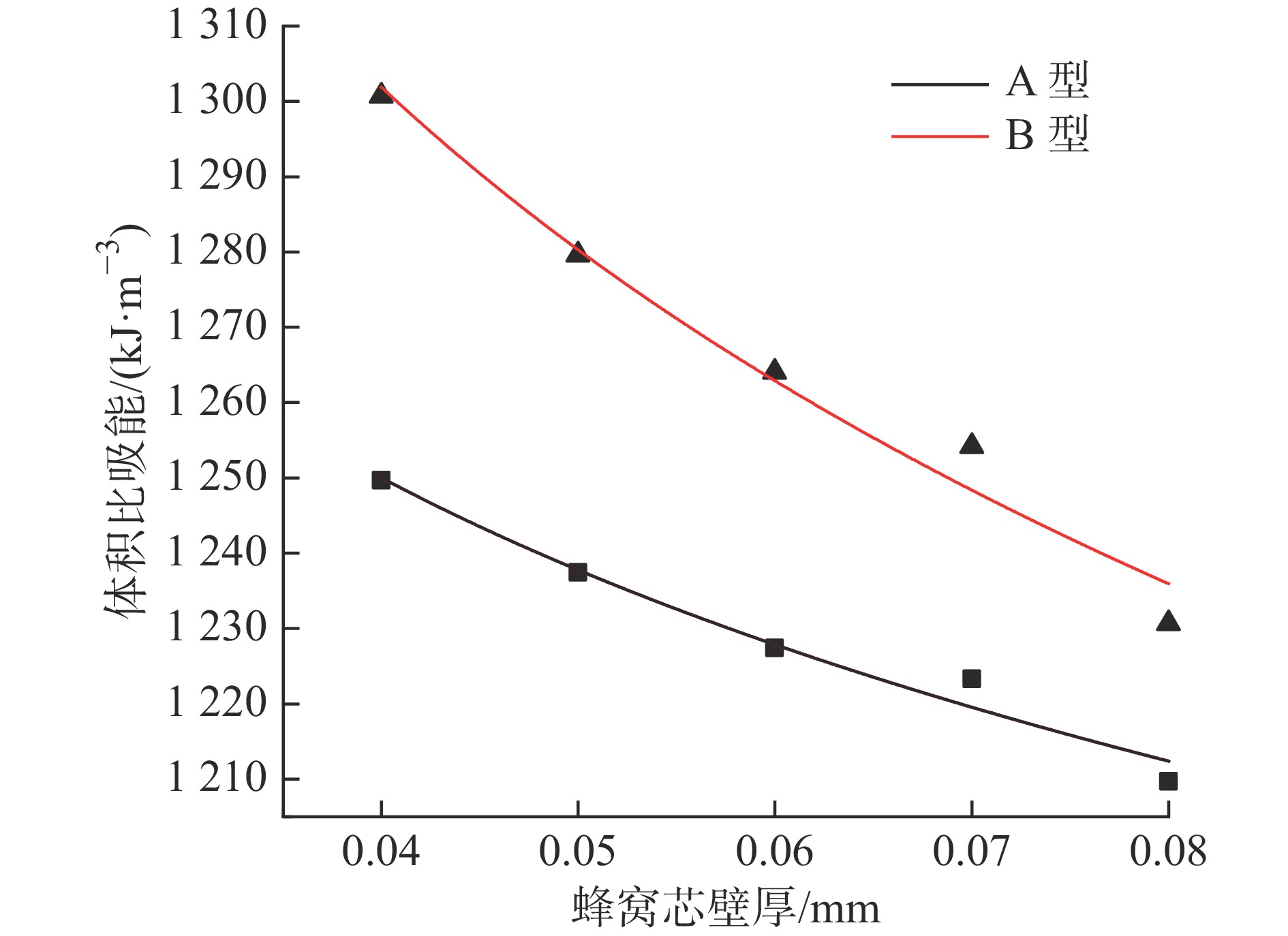
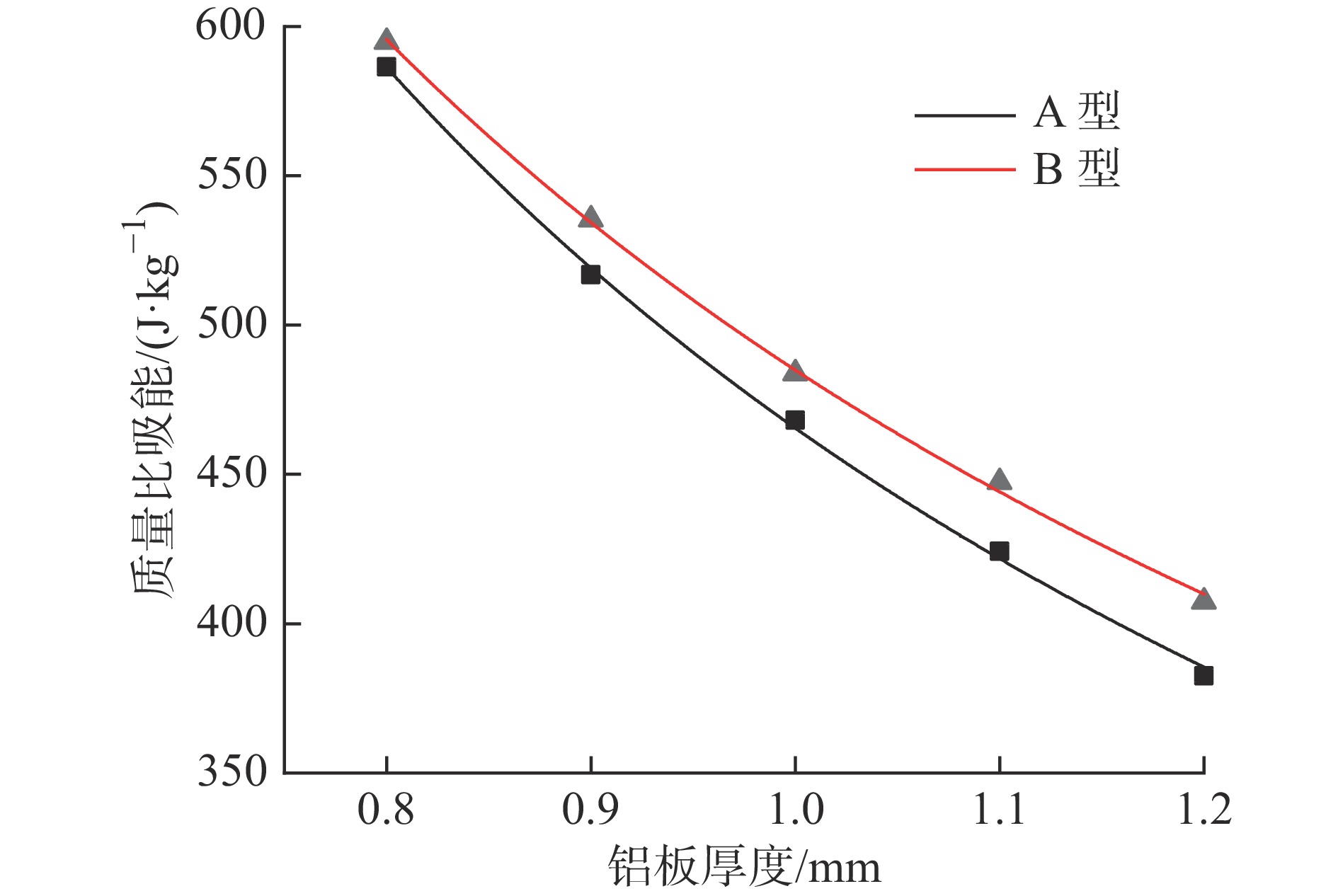
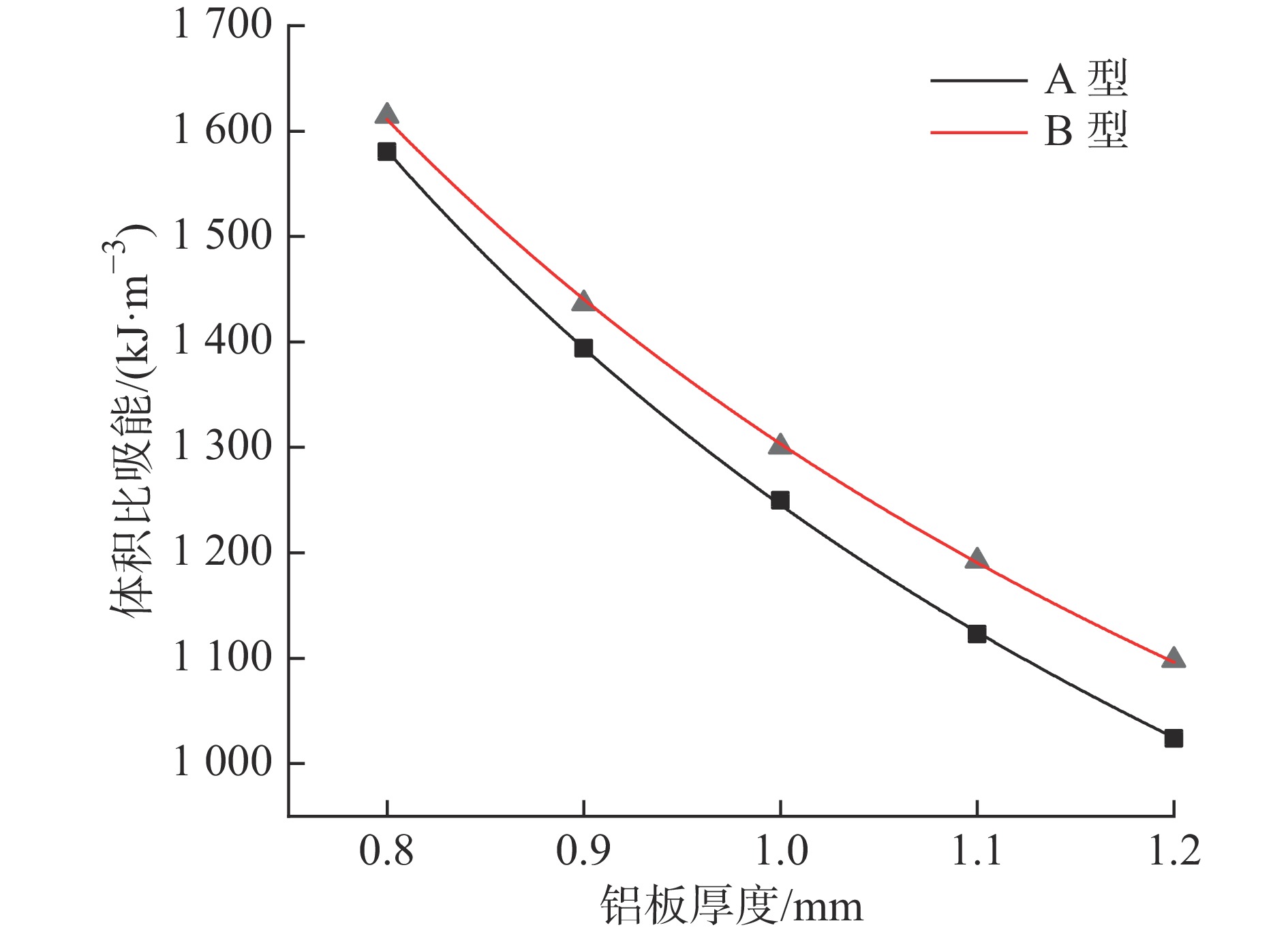
为研究不同结构参数对质量相同、强度不同的两种铝蜂窝夹芯板低速动态冲击响应的影响,建立了铝蜂窝夹芯板受半球型落锤低速冲击的数值模型,并将有限元计算结果与试验结果进行对比,检验了模型的可靠性。在此基础上,对比研究了不同上下铝板厚度和不同蜂窝芯壁厚对两种铝蜂窝夹芯板在低速冲击下吸能效果的影响。结果表明:在质量相同的情况下,强度小、高度大的夹芯板在低速冲击下力-位移曲线更易出现双峰模式,增加蜂窝芯壁厚或是上下铝板厚度都会使第一次的峰值力增加,第二次峰值力降低;强度小、高度大的夹芯板蜂窝芯在低速冲击中吸能占比更多,强度大、高度小的则是上层铝板吸收的能量更多,前者的质量、体积比吸能更高;铝蜂窝夹芯板质量比吸能和体积比吸能与壁厚边长比、板厚芯高比均呈幂次关系。
为研究不同结构参数对质量相同、强度不同的两种铝蜂窝夹芯板低速动态冲击响应的影响,建立了铝蜂窝夹芯板受半球型落锤低速冲击的数值模型,并将有限元计算结果与试验结果进行对比,检验了模型的可靠性。在此基础上,对比研究了不同上下铝板厚度和不同蜂窝芯壁厚对两种铝蜂窝夹芯板在低速冲击下吸能效果的影响。结果表明:在质量相同的情况下,强度小、高度大的夹芯板在低速冲击下力-位移曲线更易出现双峰模式,增加蜂窝芯壁厚或是上下铝板厚度都会使第一次的峰值力增加,第二次峰值力降低;强度小、高度大的夹芯板蜂窝芯在低速冲击中吸能占比更多,强度大、高度小的则是上层铝板吸收的能量更多,前者的质量、体积比吸能更高;铝蜂窝夹芯板质量比吸能和体积比吸能与壁厚边长比、板厚芯高比均呈幂次关系。




2023, 42(3): 352-357.
doi: 10.13433/j.cnki.1003-8728.20200586
摘要:
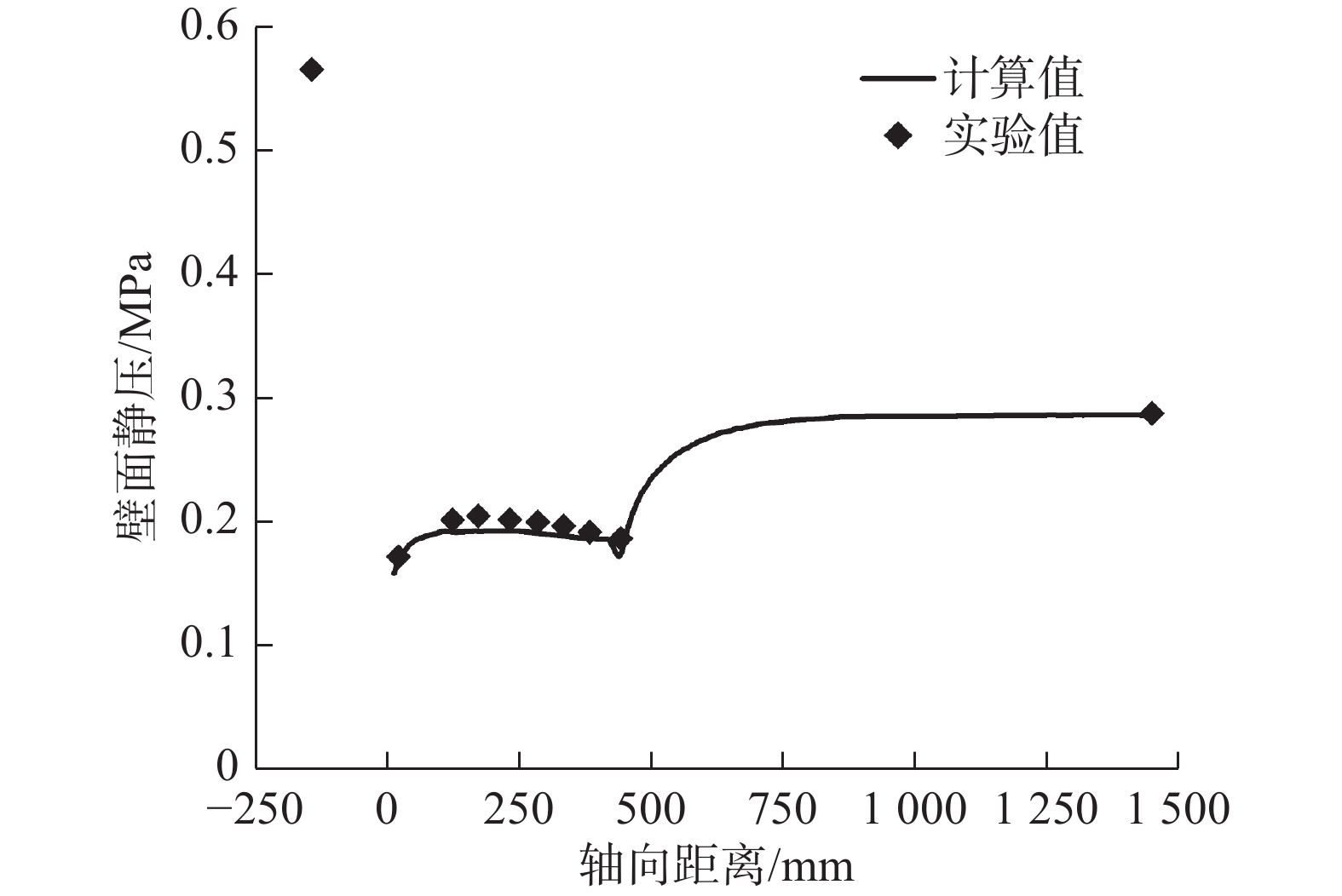
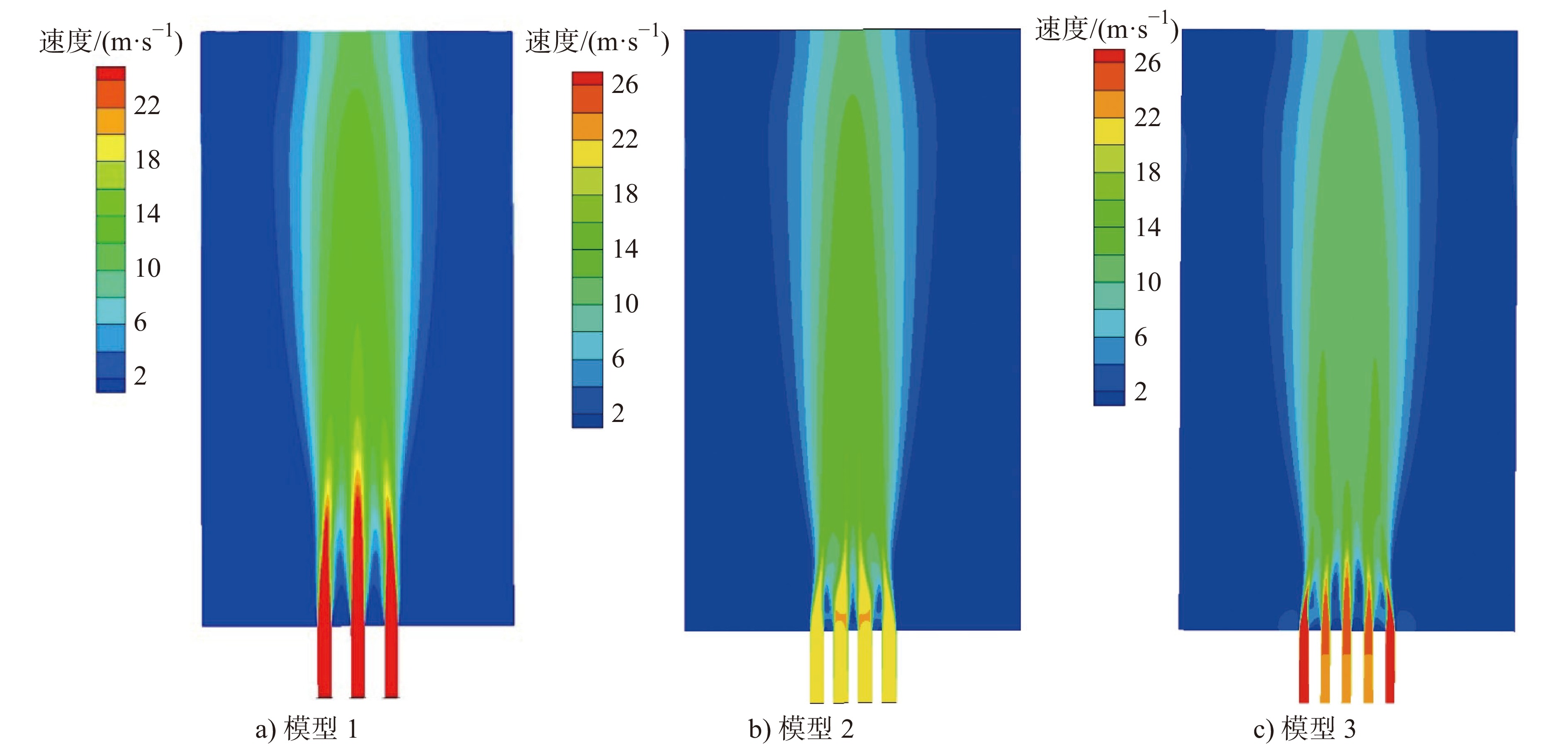
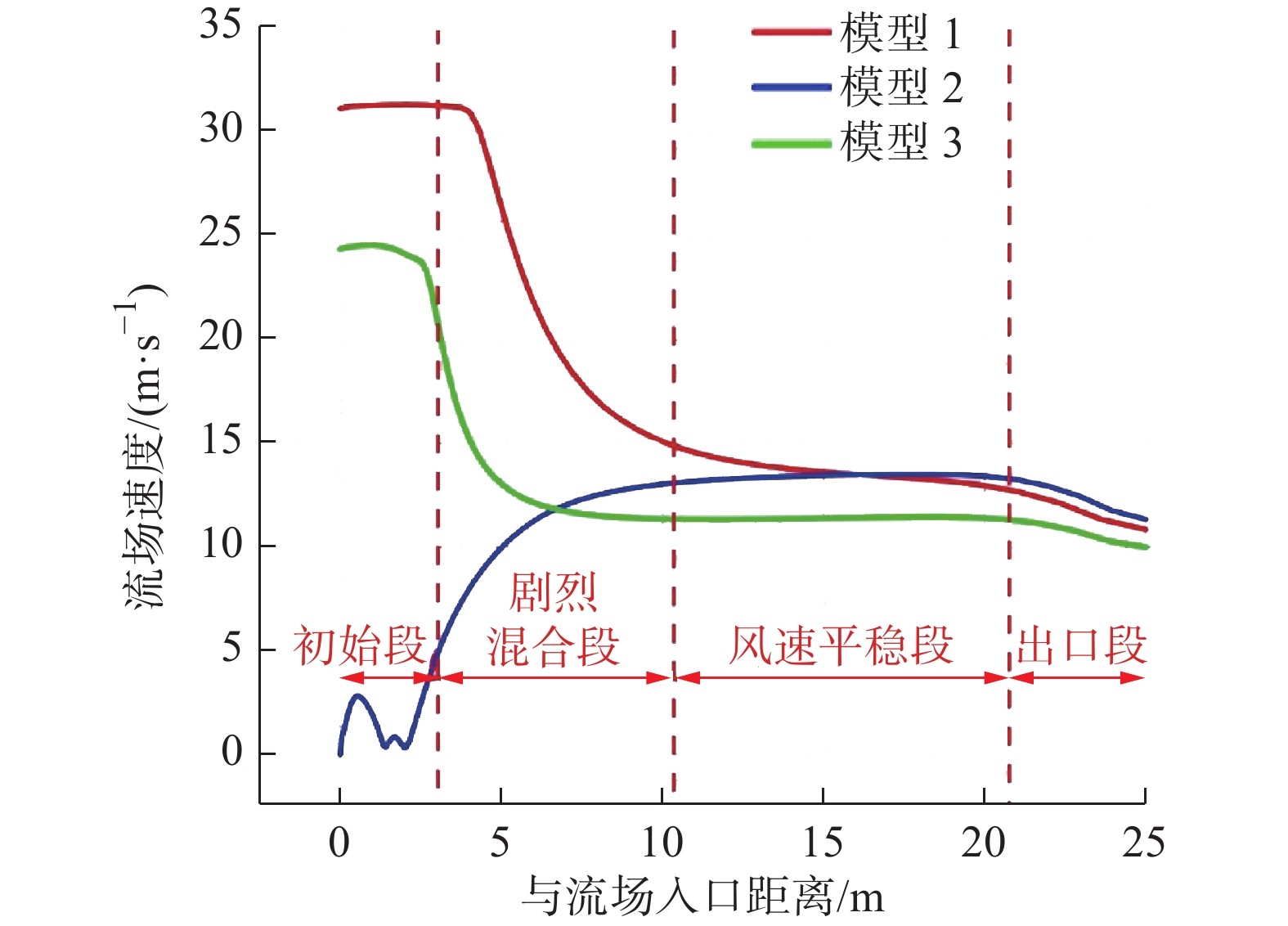
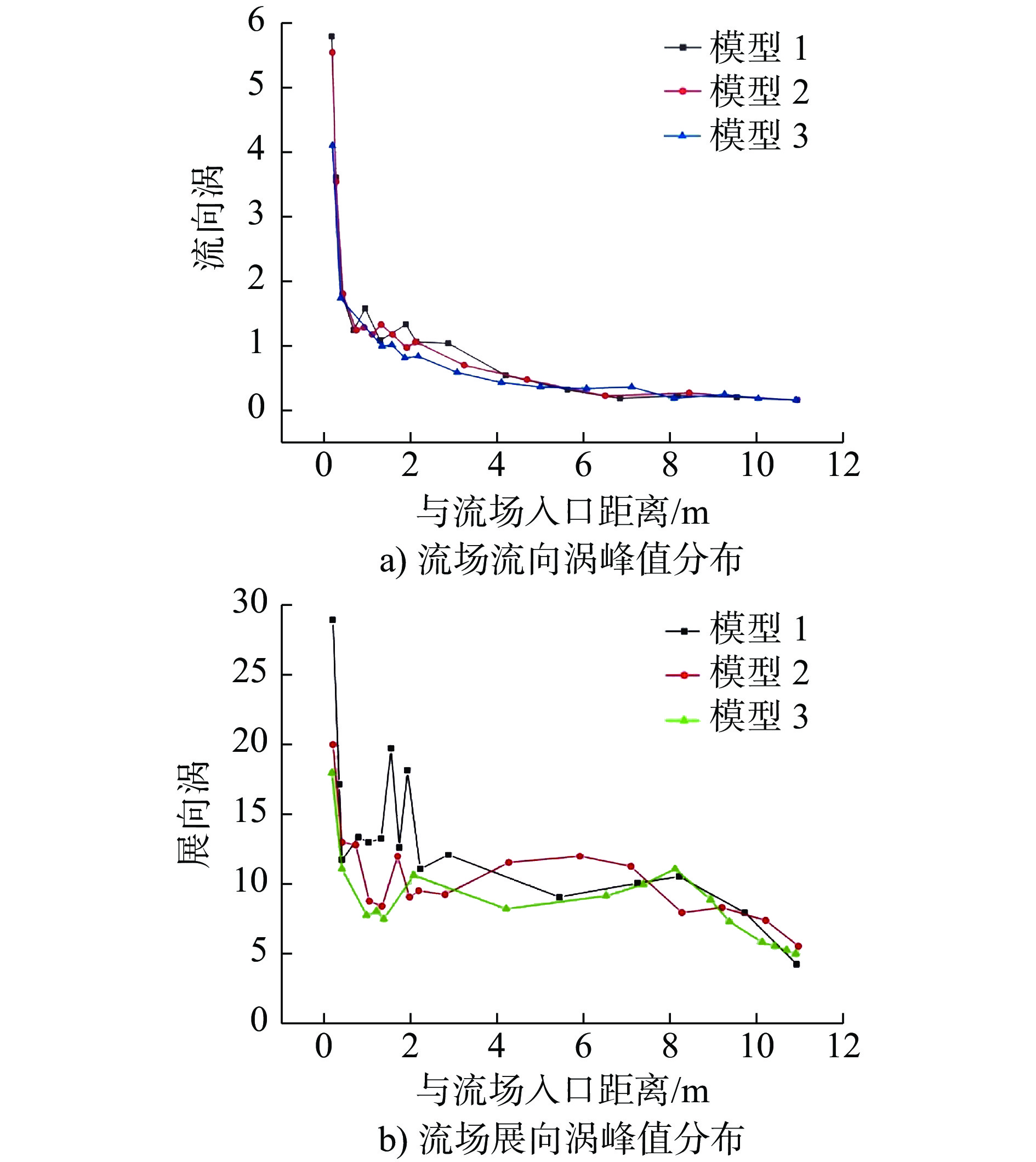
为了分析多孔射流风机作用下风场的流场特性,文中采用CFD方法,对多孔射流式风场模型内部流场进行了数值模拟,对比分析了不同喷嘴数量及排布方式对流场性能的影响,并引入涡动力学理论,分析了流场内涡结构的分布发展规律及其对流体掺混的影响。结果表明:喷嘴的数量及排布方式对流场性能有显著影响,外围喷嘴会对中心喷嘴的流动起到限制作用;流向涡对流体掺混效果的作用比展向涡大,在涡量一定的情况下,流向涡尺度越大、衰减越快,流体间的混合效果越好,流场稳定性越高。流场内速度及涡动力学分布表明,流场稳定性随着喷嘴数量的增加而显著提高,因此在保证经济性的前提下应尽量采用数量多的喷嘴排布方式。
为了分析多孔射流风机作用下风场的流场特性,文中采用CFD方法,对多孔射流式风场模型内部流场进行了数值模拟,对比分析了不同喷嘴数量及排布方式对流场性能的影响,并引入涡动力学理论,分析了流场内涡结构的分布发展规律及其对流体掺混的影响。结果表明:喷嘴的数量及排布方式对流场性能有显著影响,外围喷嘴会对中心喷嘴的流动起到限制作用;流向涡对流体掺混效果的作用比展向涡大,在涡量一定的情况下,流向涡尺度越大、衰减越快,流体间的混合效果越好,流场稳定性越高。流场内速度及涡动力学分布表明,流场稳定性随着喷嘴数量的增加而显著提高,因此在保证经济性的前提下应尽量采用数量多的喷嘴排布方式。




2023, 42(3): 358-366.
doi: 10.13433/j.cnki.1003-8728.20200594
摘要:
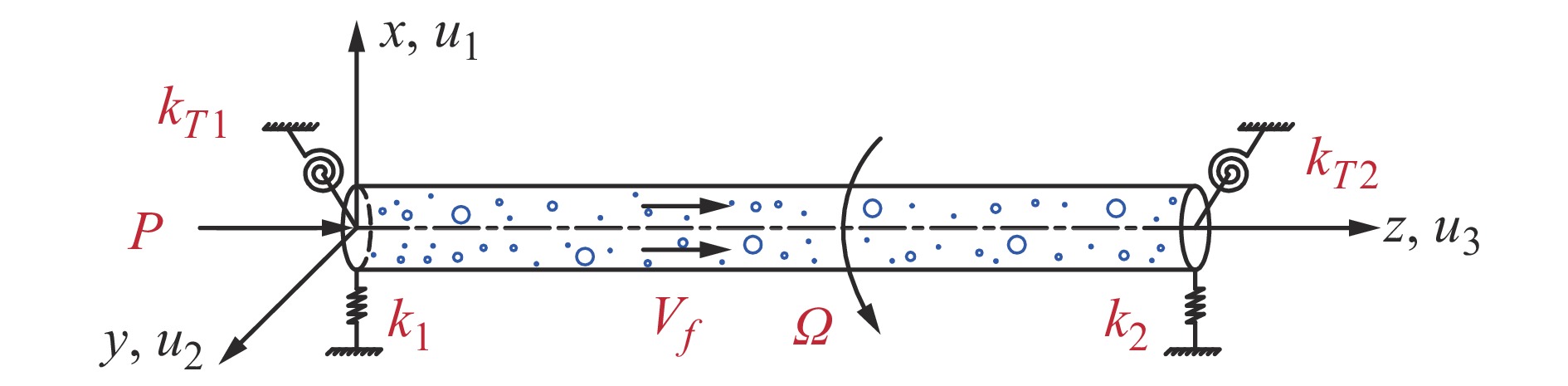
钻柱在内流作用和旋转因素的影响下容易产生耦合振动,发生疲劳失效。本文基于微分求积法(DQM)对含双相流水平井钻柱耦合动力学特性进行了研究。利用扩展的Hamilton变分原理建立了计入内流、轴向压力及旋转等因素影响的水平井钻柱动力学方程。在振动问题中考虑了广义边界条件,通过改变边界等效弹簧刚度将模型简化为简支、悬臂等简单边界条件模型进行研究。通过分析旋转角速度、轴向压力、液相流速、气体体积分数等因素对模型频率特性的影响,得到了无量纲固有频率随不同参数变化的特征曲线。分析结果表明:不同边界条件下模型的频率特性曲线有很大的差别;气体体积分数对临界流速的影响在悬臂管系统中表现的更为明显;在简支管模型中,随着轴力的增大会产生模态耦合颤振。此外,通过液相流速和旋转角速度的频率云图展示了两种因素对钻柱频率特性的影响。
钻柱在内流作用和旋转因素的影响下容易产生耦合振动,发生疲劳失效。本文基于微分求积法(DQM)对含双相流水平井钻柱耦合动力学特性进行了研究。利用扩展的Hamilton变分原理建立了计入内流、轴向压力及旋转等因素影响的水平井钻柱动力学方程。在振动问题中考虑了广义边界条件,通过改变边界等效弹簧刚度将模型简化为简支、悬臂等简单边界条件模型进行研究。通过分析旋转角速度、轴向压力、液相流速、气体体积分数等因素对模型频率特性的影响,得到了无量纲固有频率随不同参数变化的特征曲线。分析结果表明:不同边界条件下模型的频率特性曲线有很大的差别;气体体积分数对临界流速的影响在悬臂管系统中表现的更为明显;在简支管模型中,随着轴力的增大会产生模态耦合颤振。此外,通过液相流速和旋转角速度的频率云图展示了两种因素对钻柱频率特性的影响。






2023, 42(3): 367-374.
doi: 10.13433/j.cnki.1003-8728.20200591
摘要:
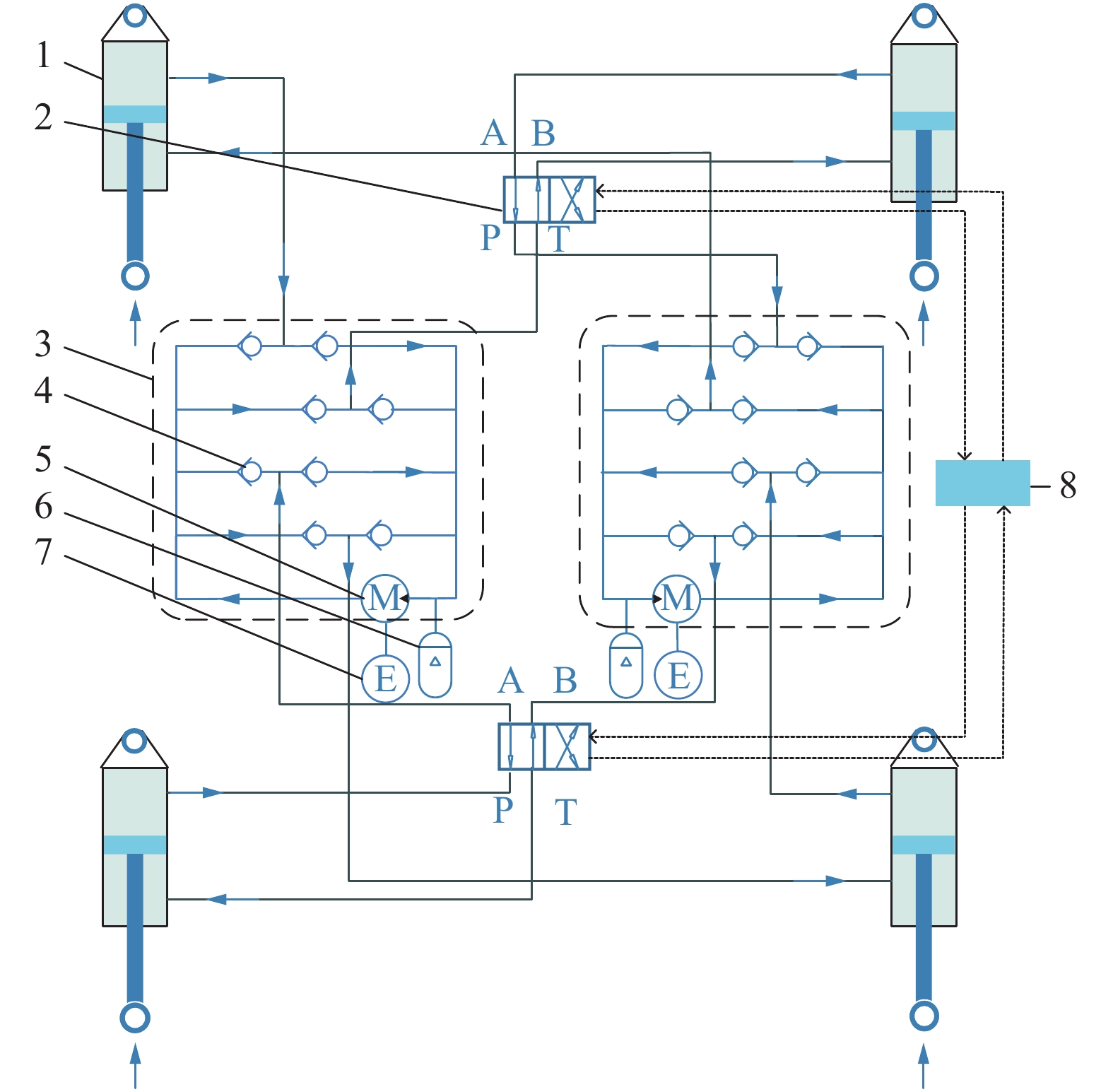
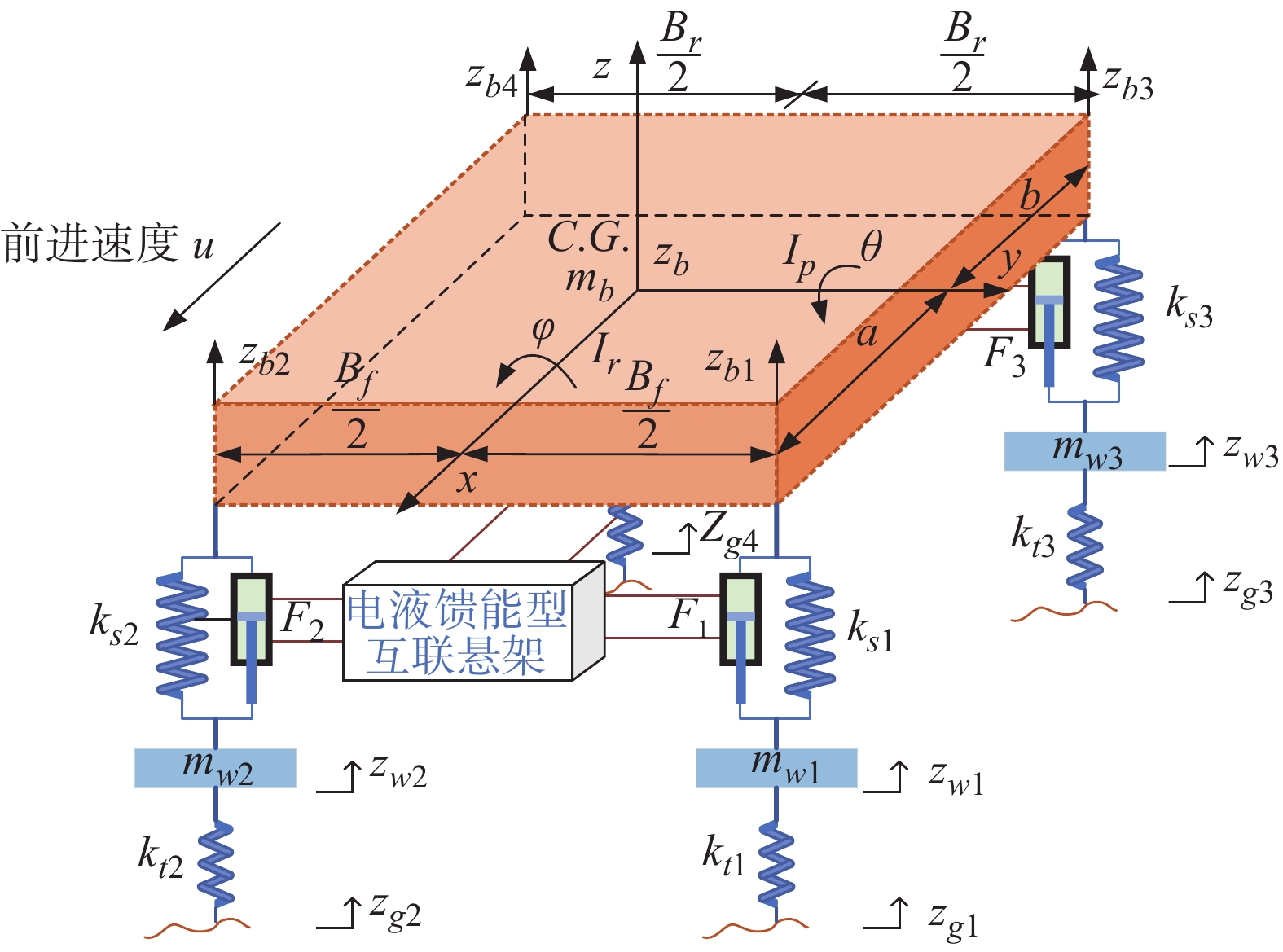
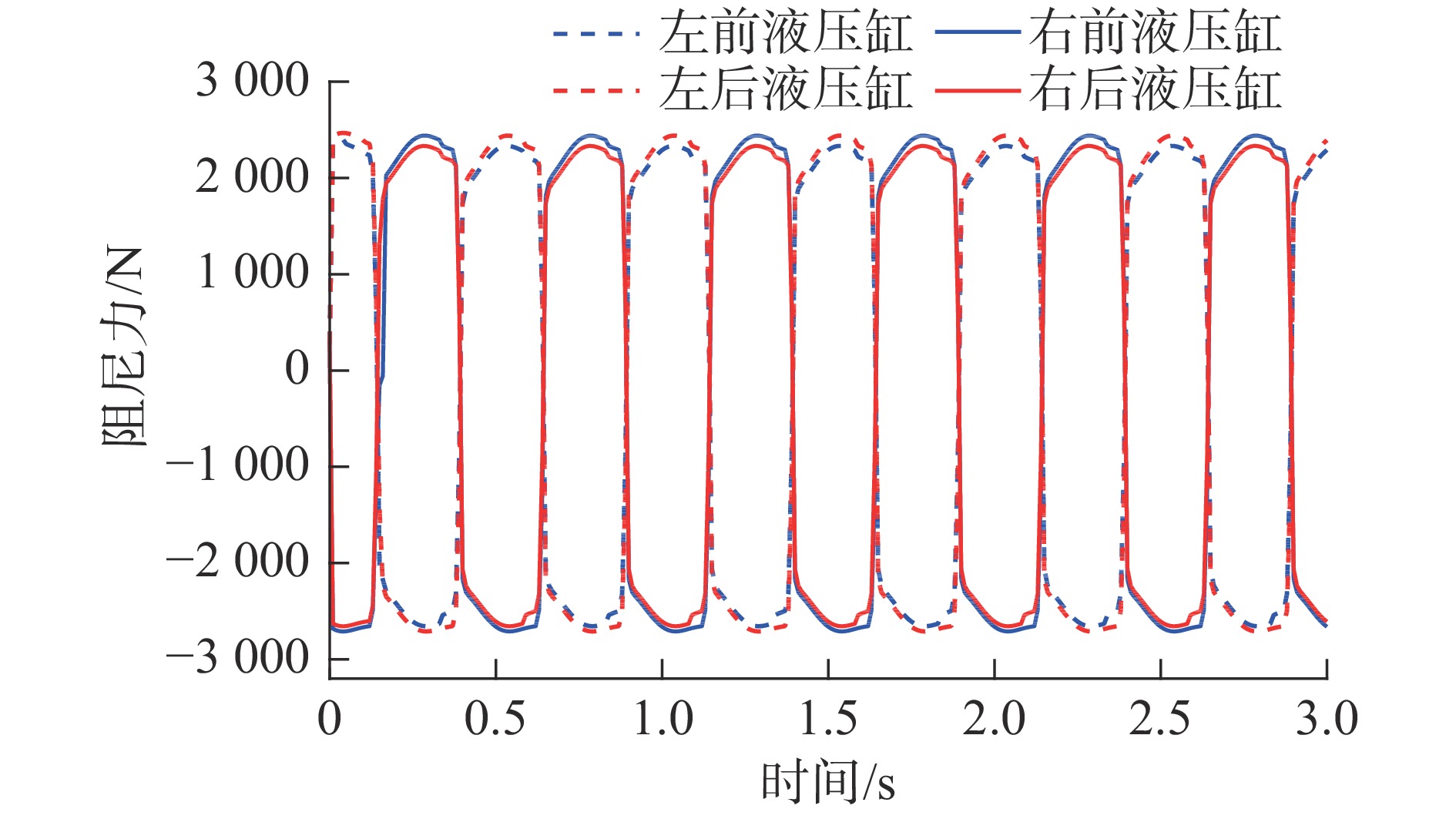
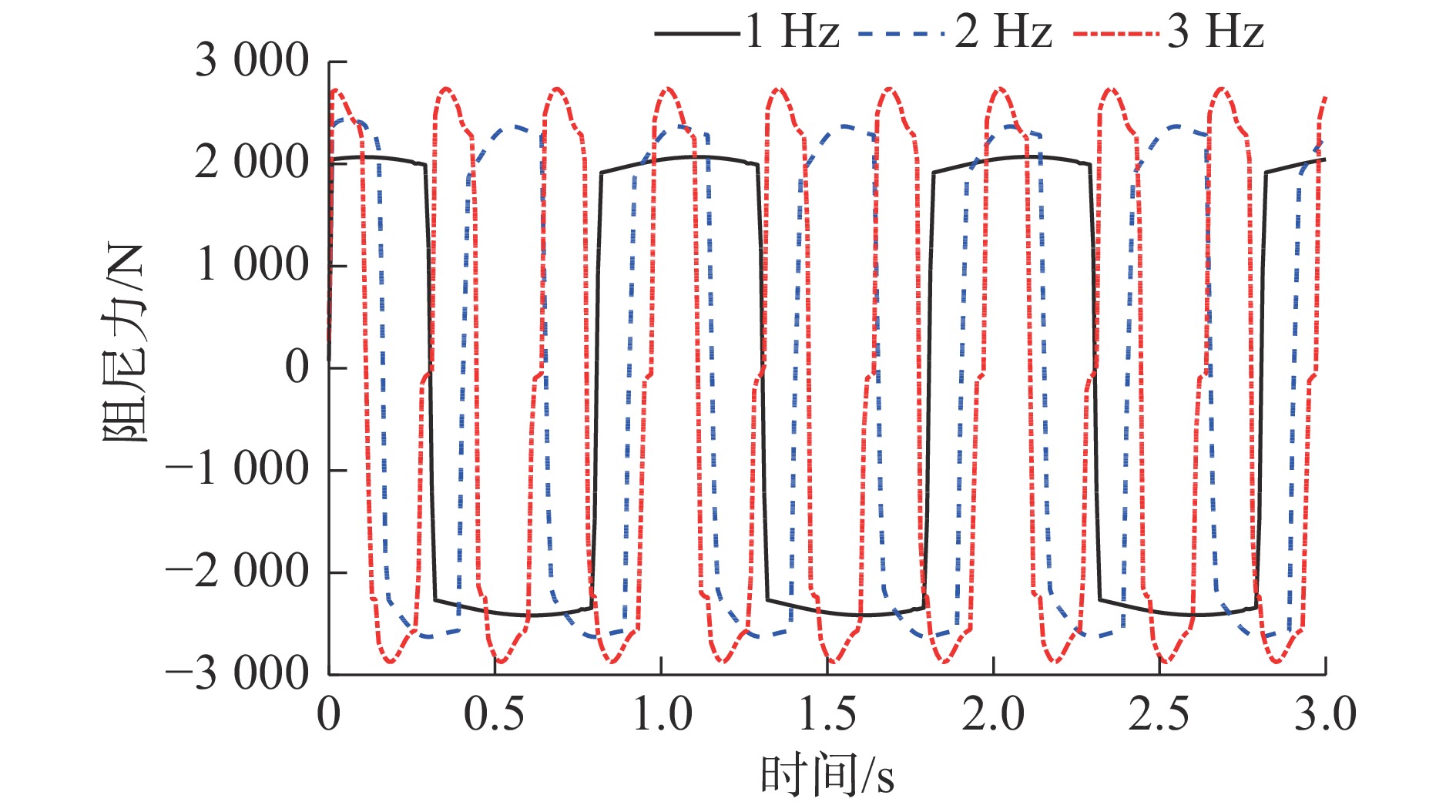
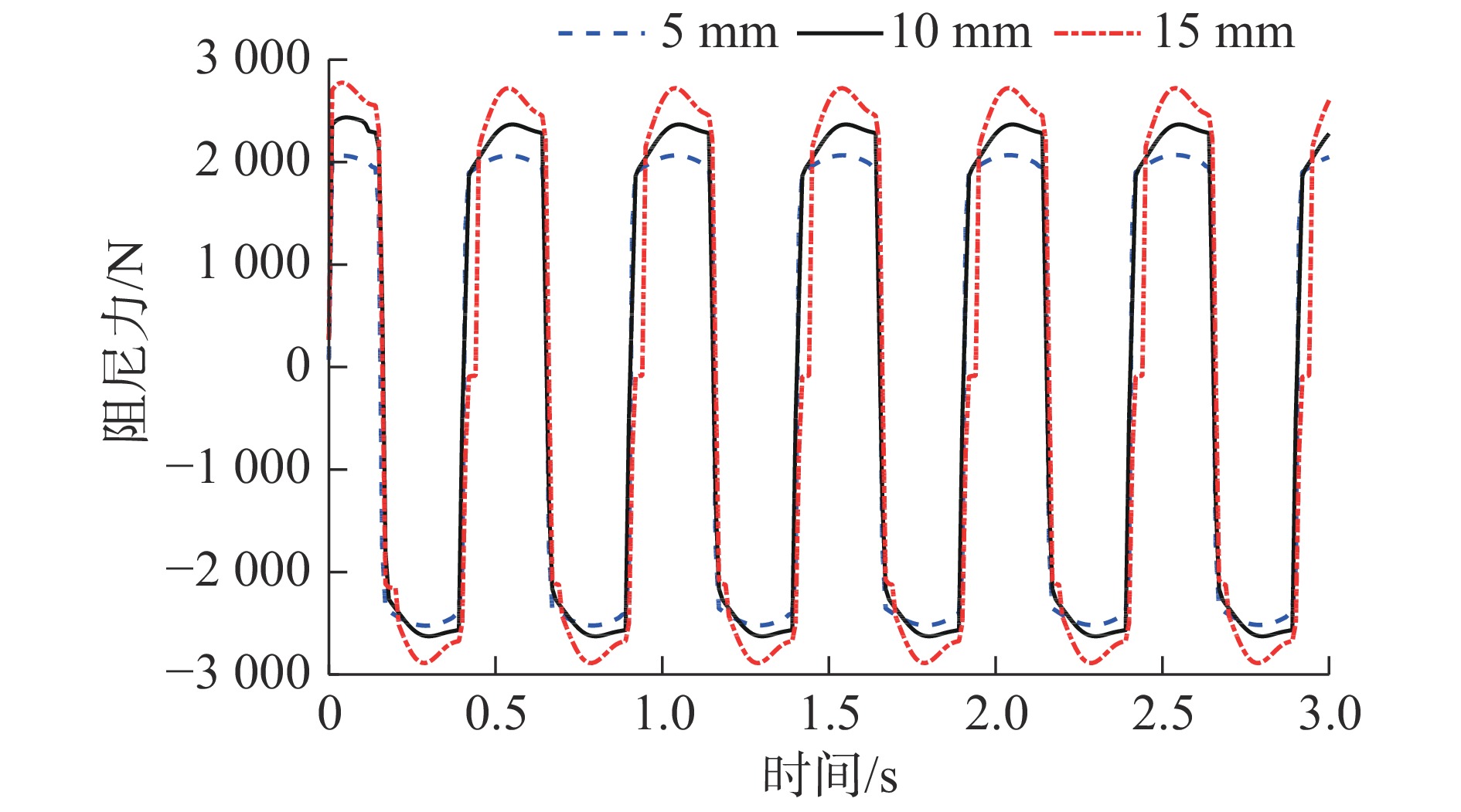
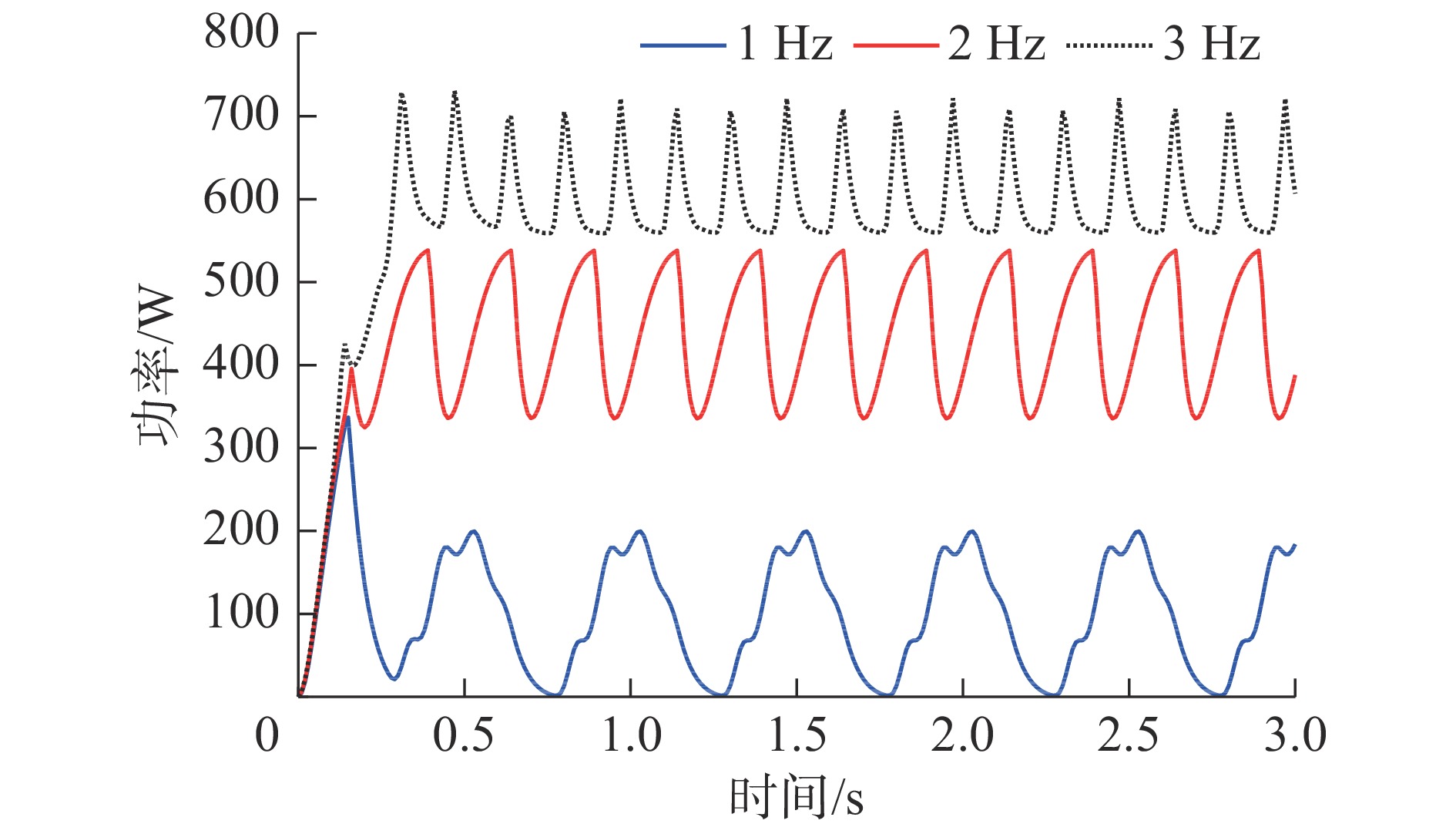
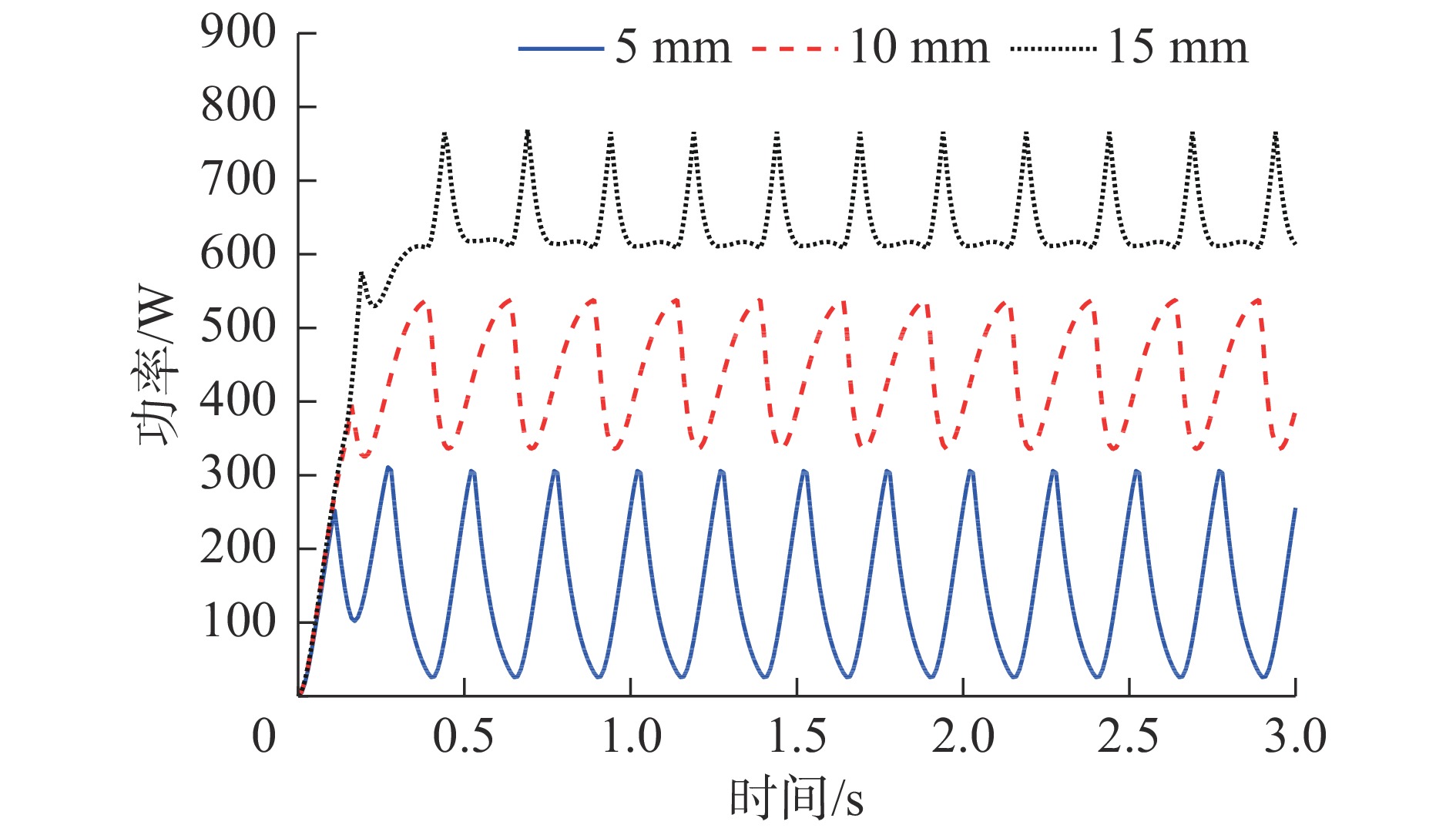
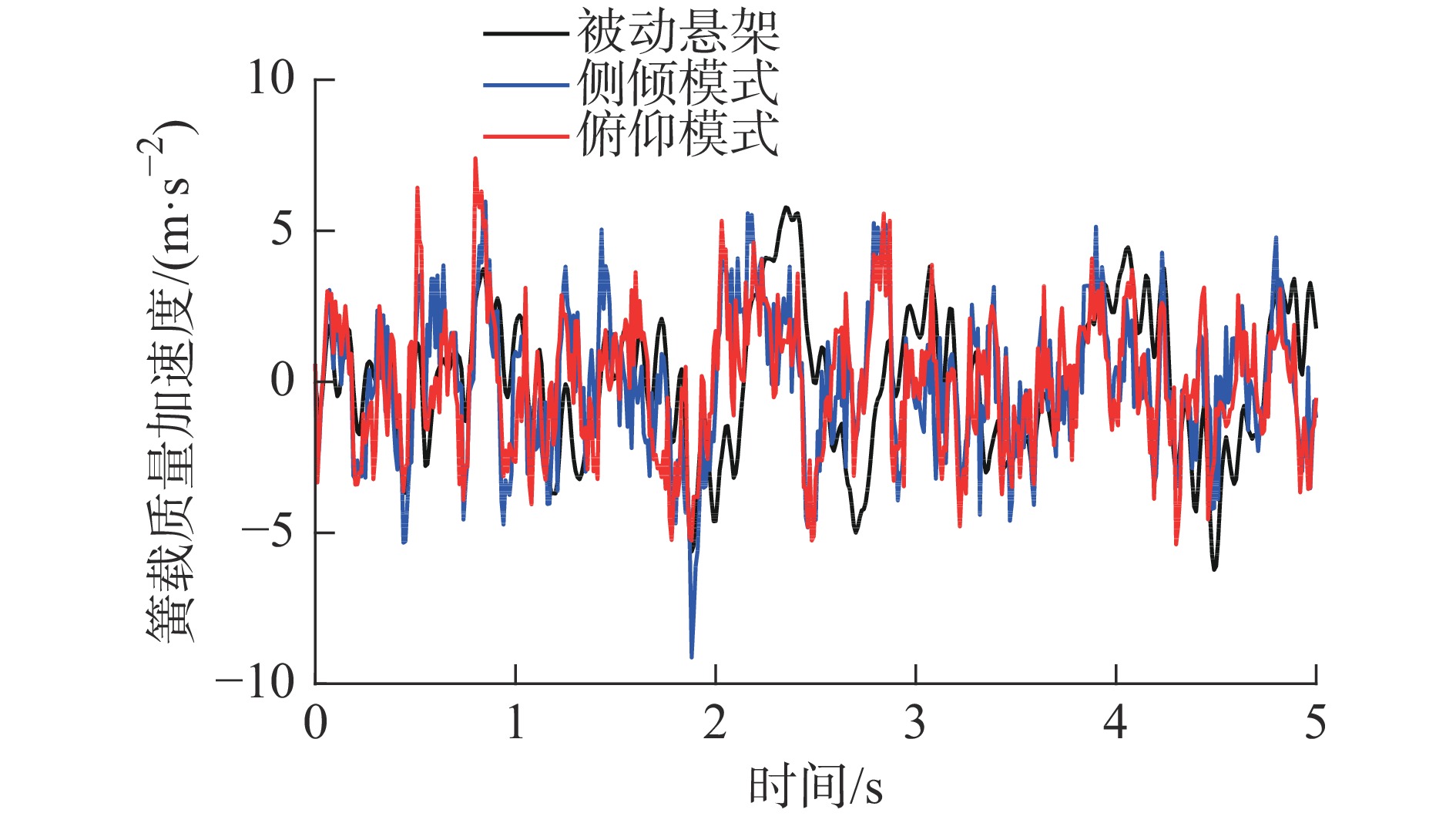
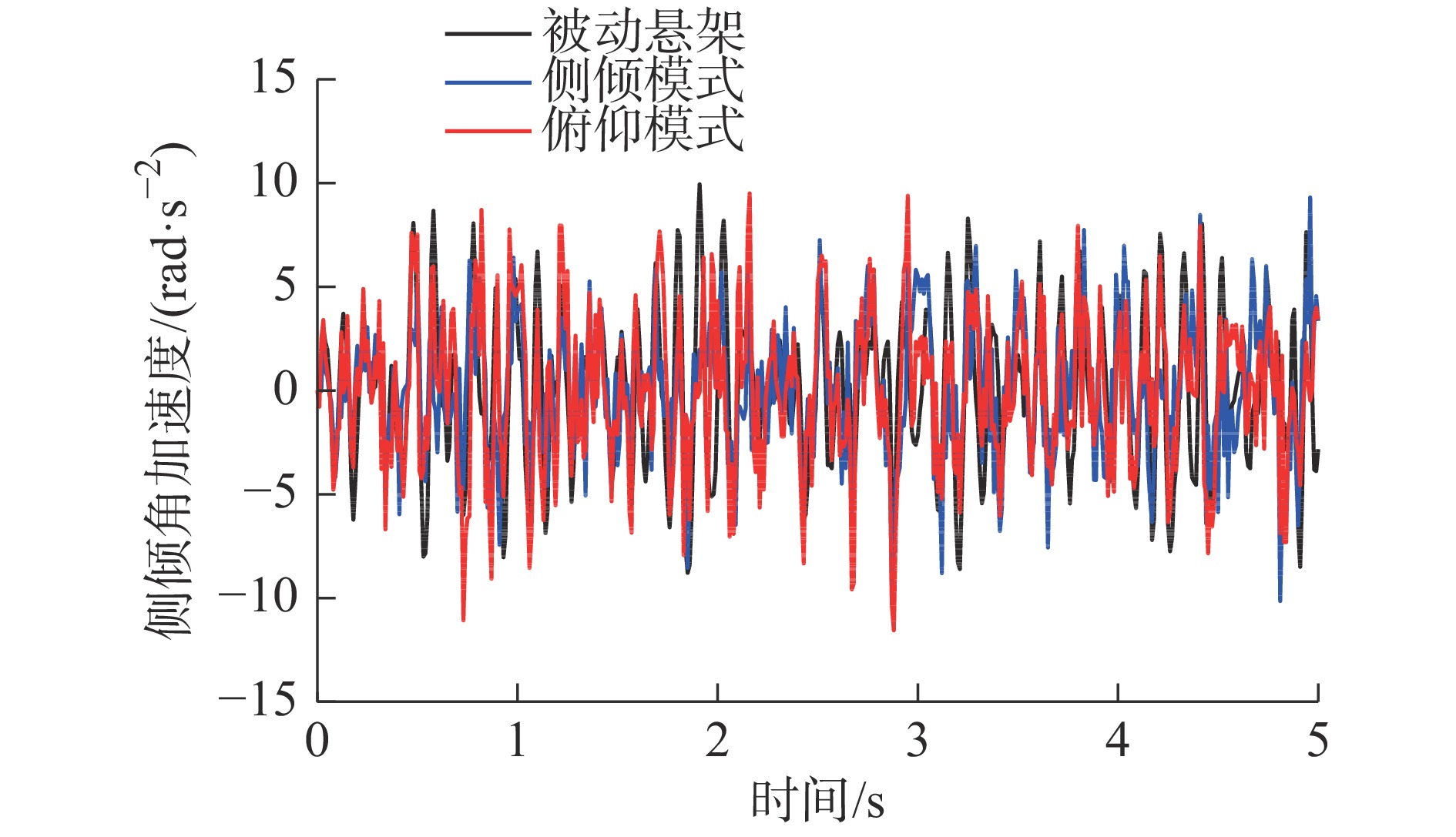
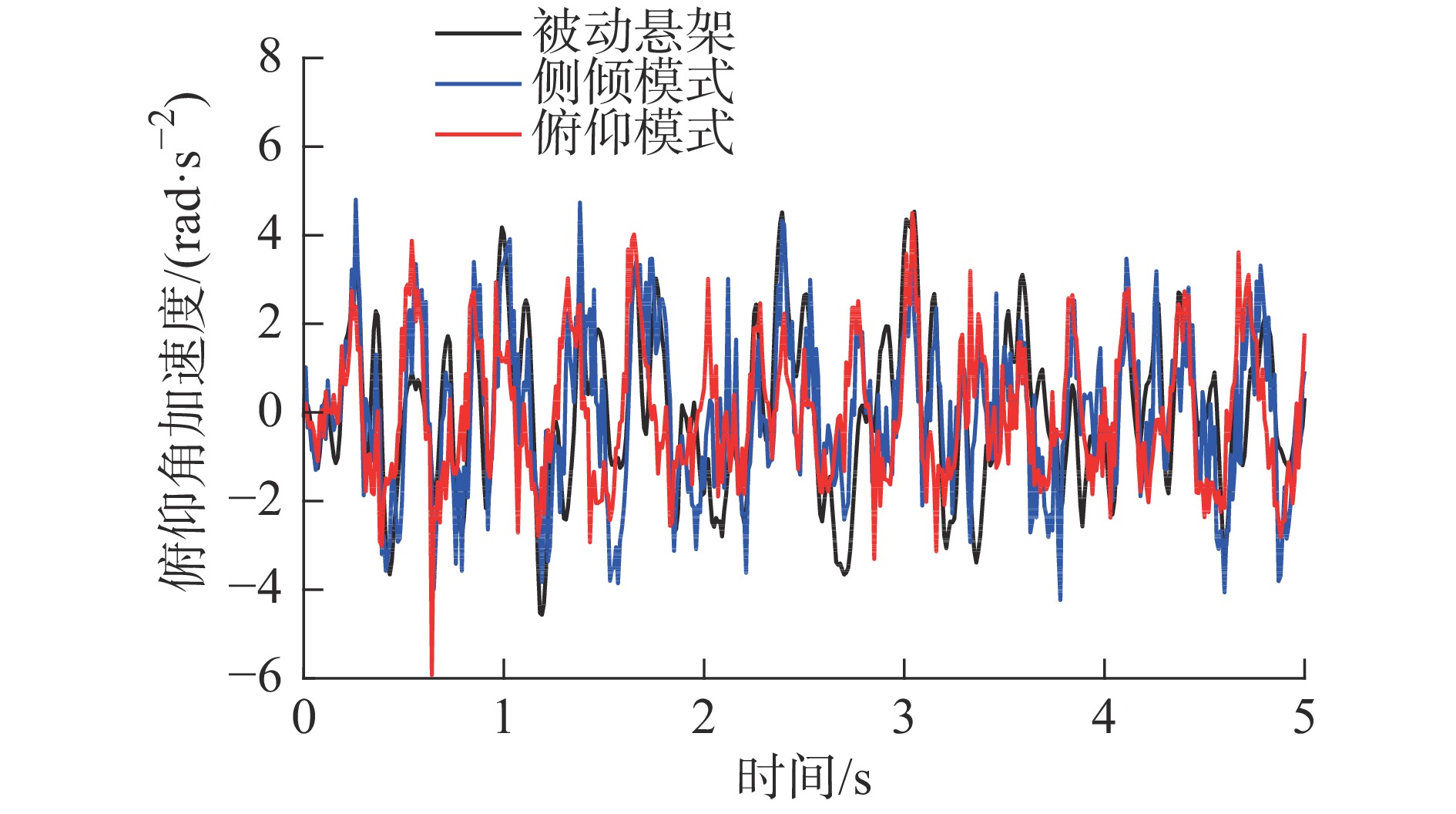
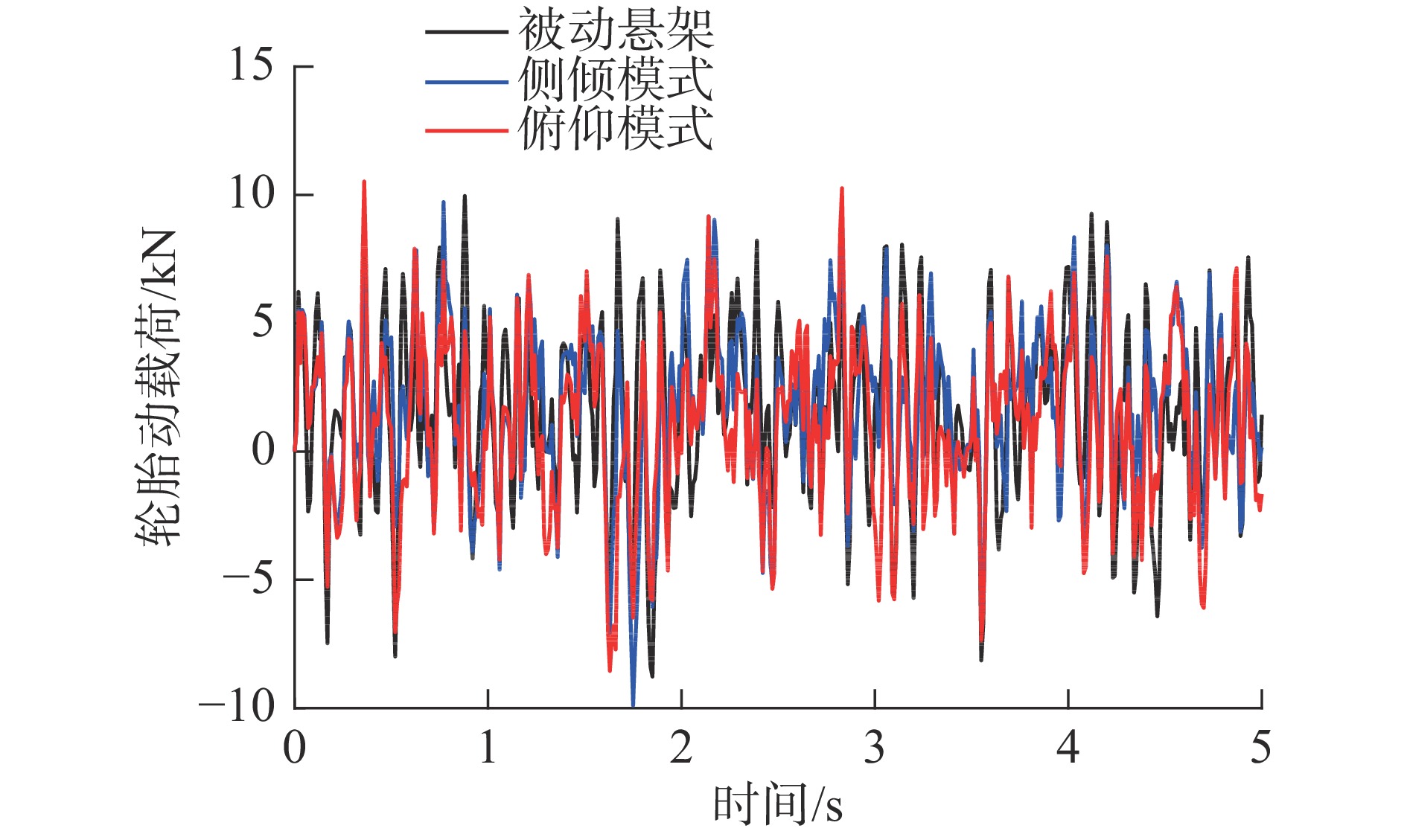
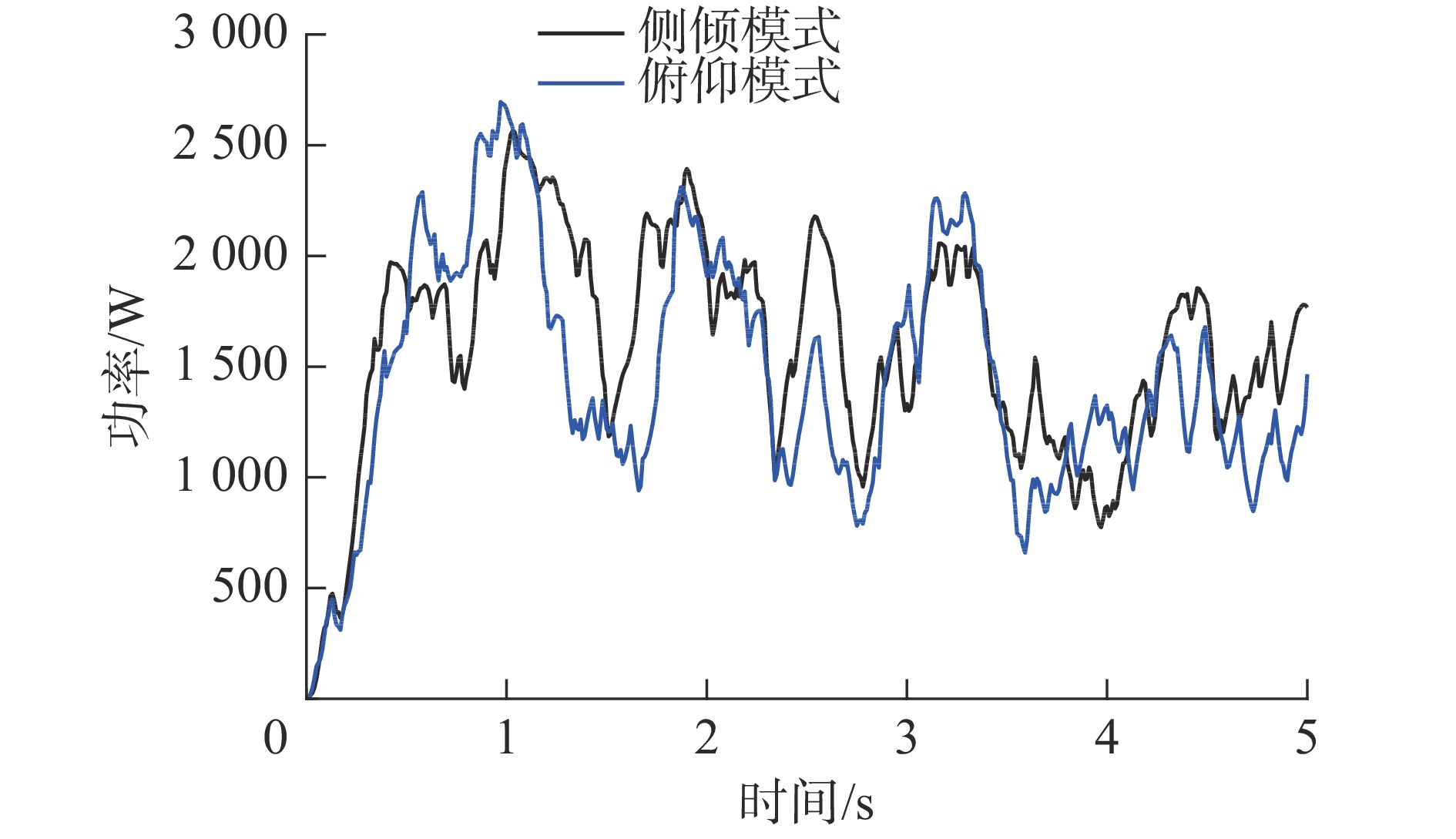
为了提高馈能悬架的能量回收效果及动力学性能,提出了一种车辆电液馈能型互联悬架结构。根据流量/压降之间的关系,建立了整车7自由度与电液馈能型互联悬架的耦合数学模型,通过正弦激励对车辆电液馈能型互联悬架进行阻尼特性和馈能特性仿真。以四轮随机路面为输入,分析悬架对车辆的平顺性、行驶稳定性的影响。结果表明:阻尼力、馈能功率与激励频率、幅值成正比,馈能功率波动与之成反比,馈能效率随幅值、频率增大而先增大后减小;随机路面下,与被动悬架相比,电液馈能型互联悬架的俯仰模式、侧倾模式均可以改善动力学性能的同时实现振动能量的回收。
为了提高馈能悬架的能量回收效果及动力学性能,提出了一种车辆电液馈能型互联悬架结构。根据流量/压降之间的关系,建立了整车7自由度与电液馈能型互联悬架的耦合数学模型,通过正弦激励对车辆电液馈能型互联悬架进行阻尼特性和馈能特性仿真。以四轮随机路面为输入,分析悬架对车辆的平顺性、行驶稳定性的影响。结果表明:阻尼力、馈能功率与激励频率、幅值成正比,馈能功率波动与之成反比,馈能效率随幅值、频率增大而先增大后减小;随机路面下,与被动悬架相比,电液馈能型互联悬架的俯仰模式、侧倾模式均可以改善动力学性能的同时实现振动能量的回收。



2023, 42(3): 375-381.
doi: 10.13433/j.cnki.1003-8728.20200612
摘要:
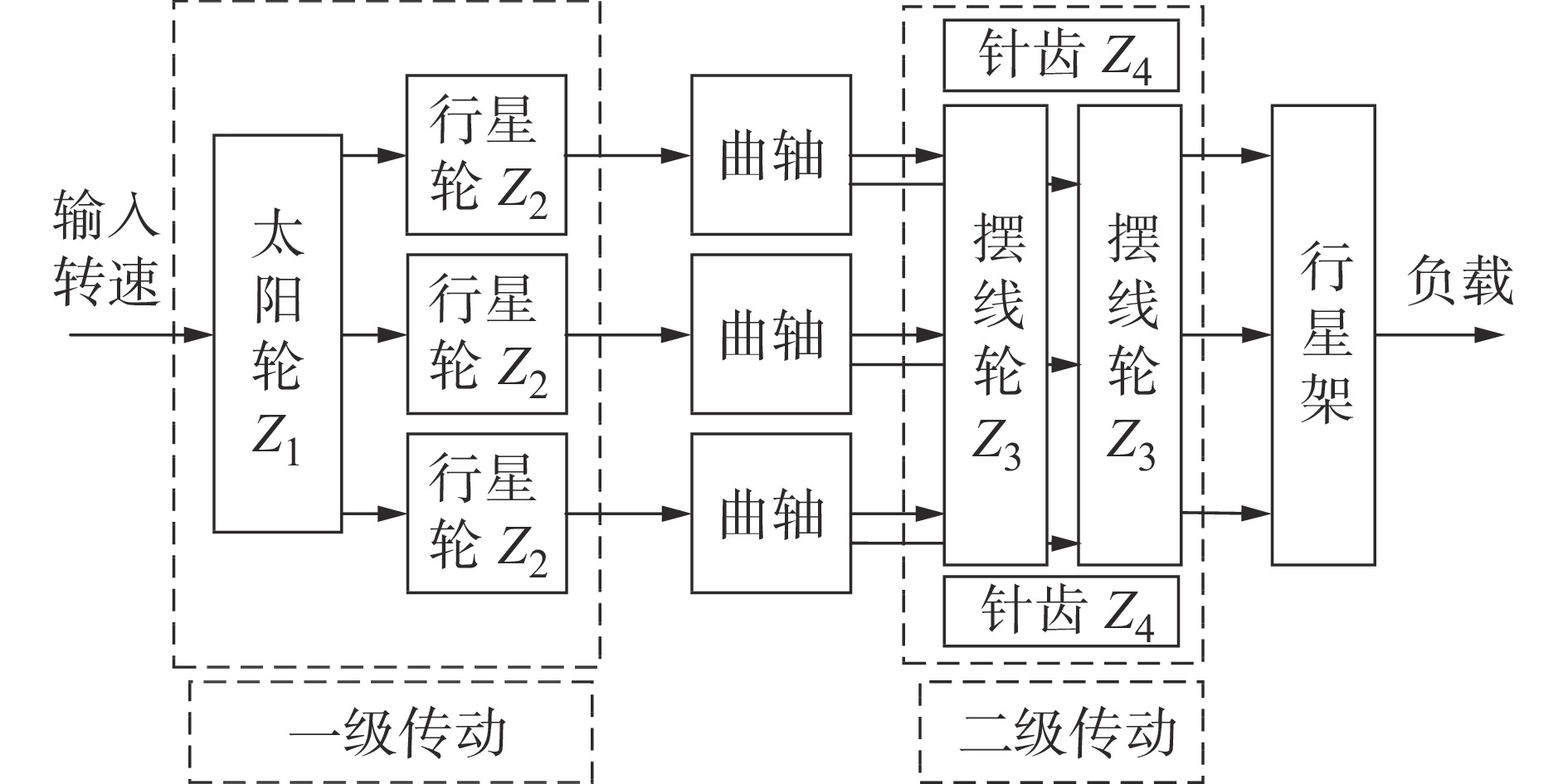
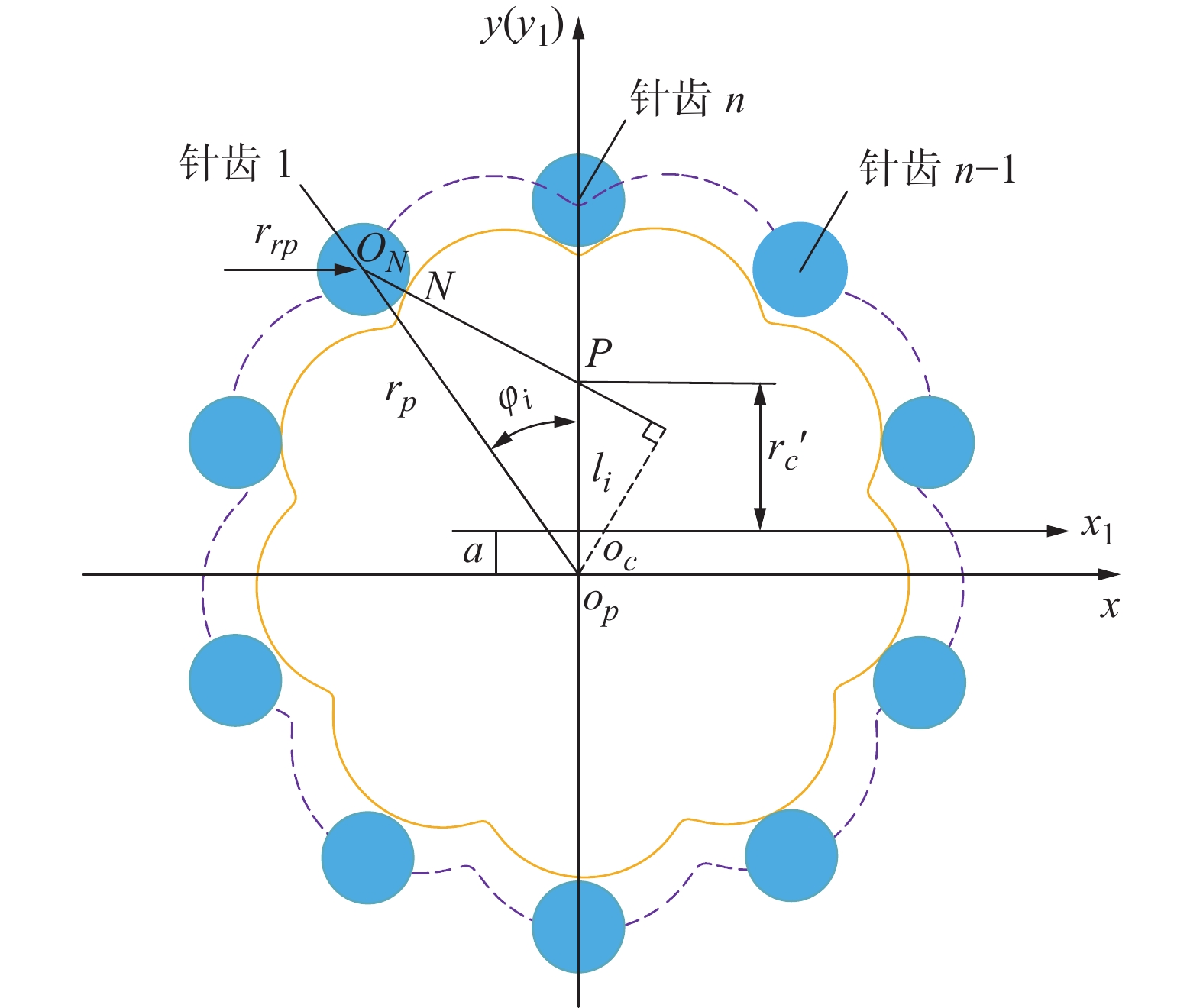
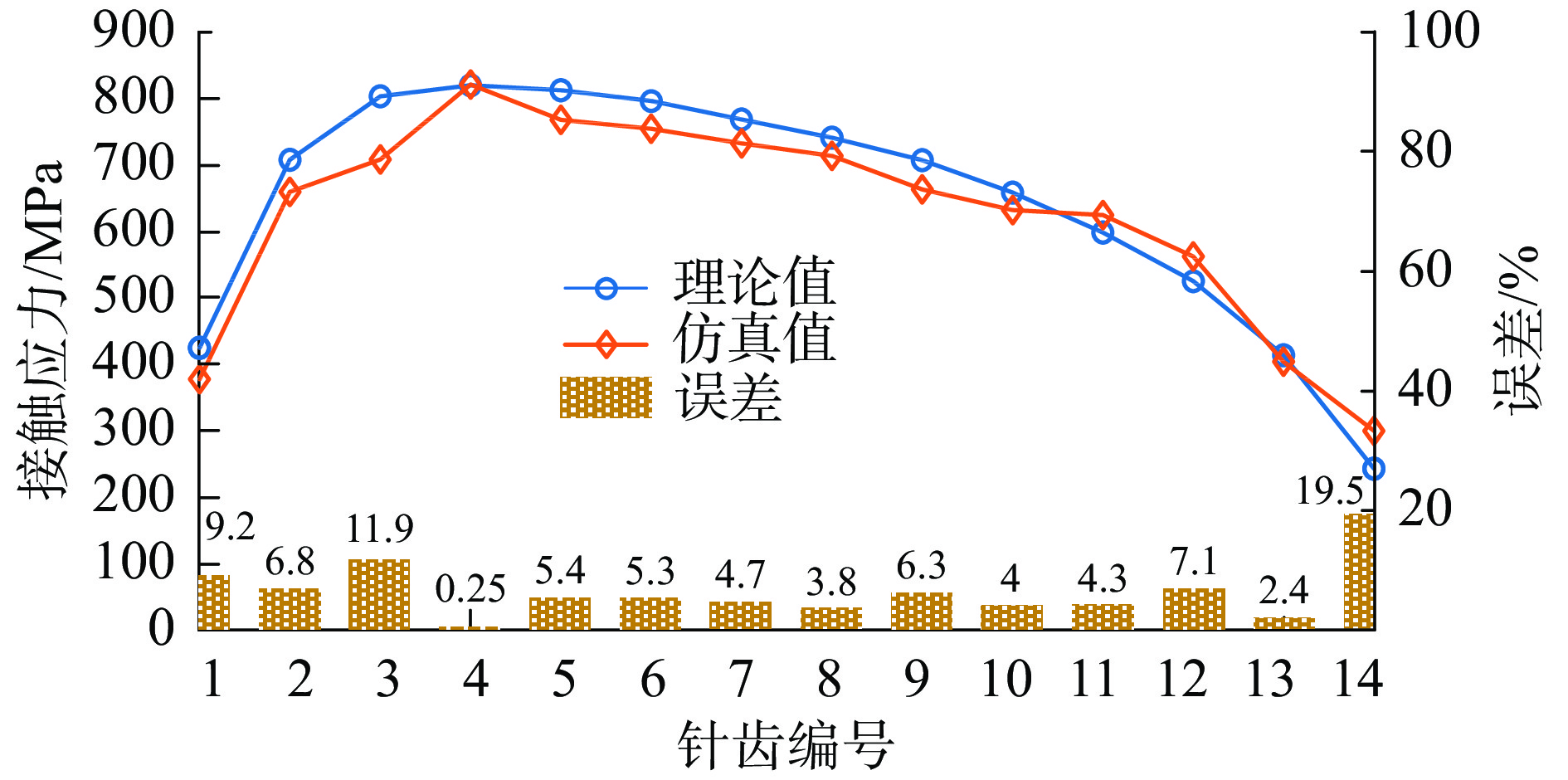
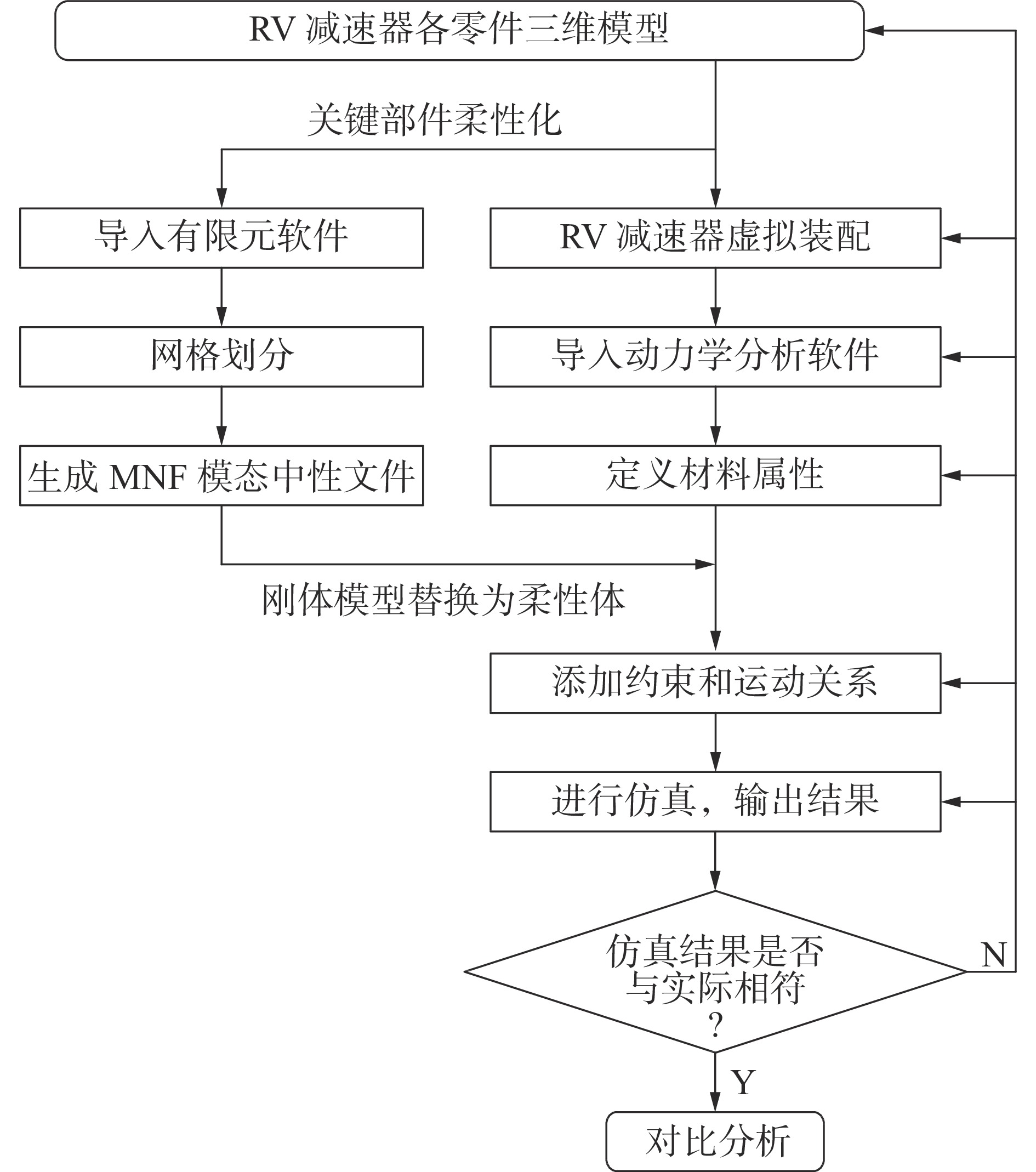
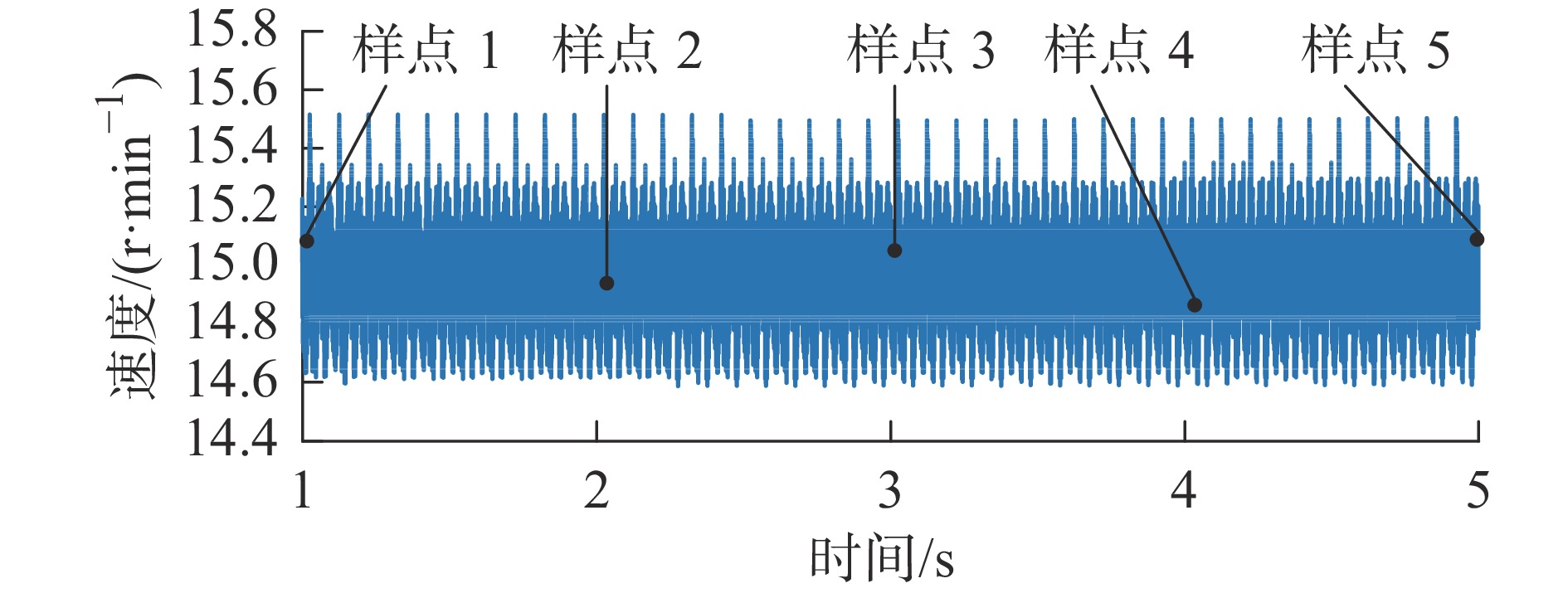
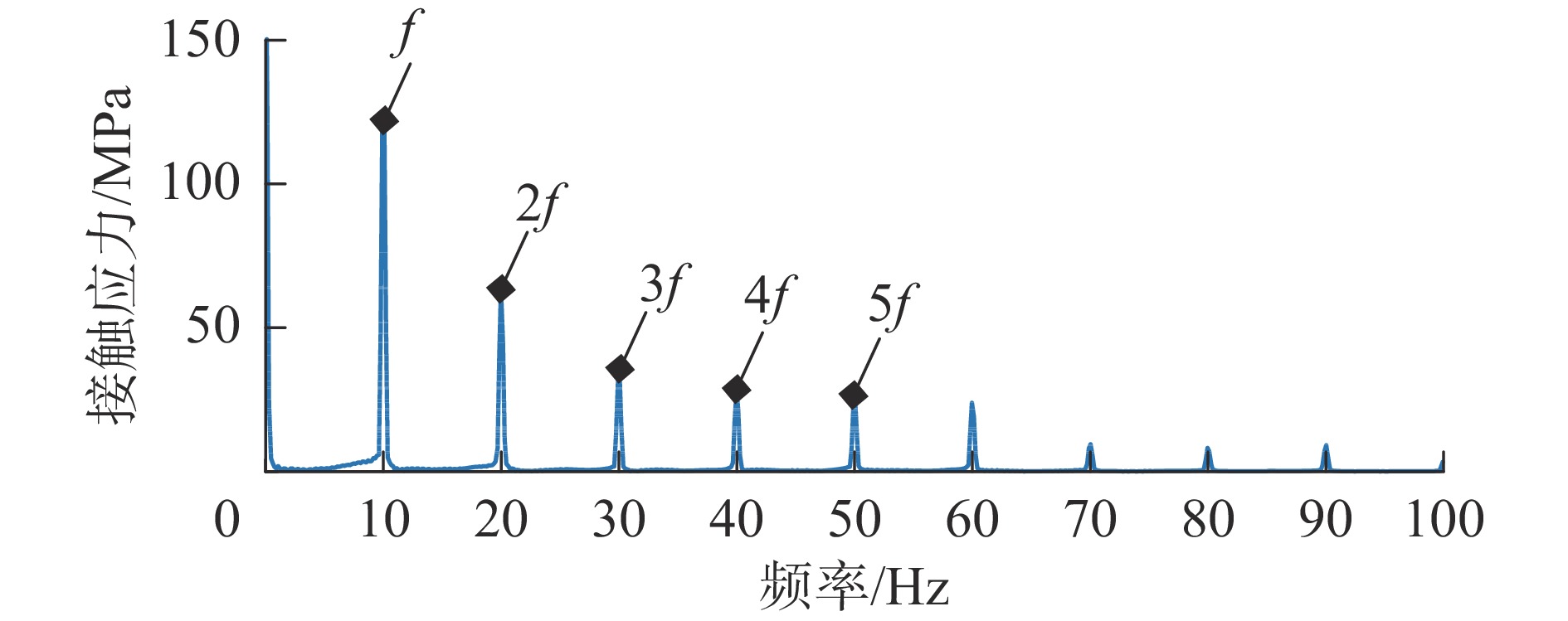
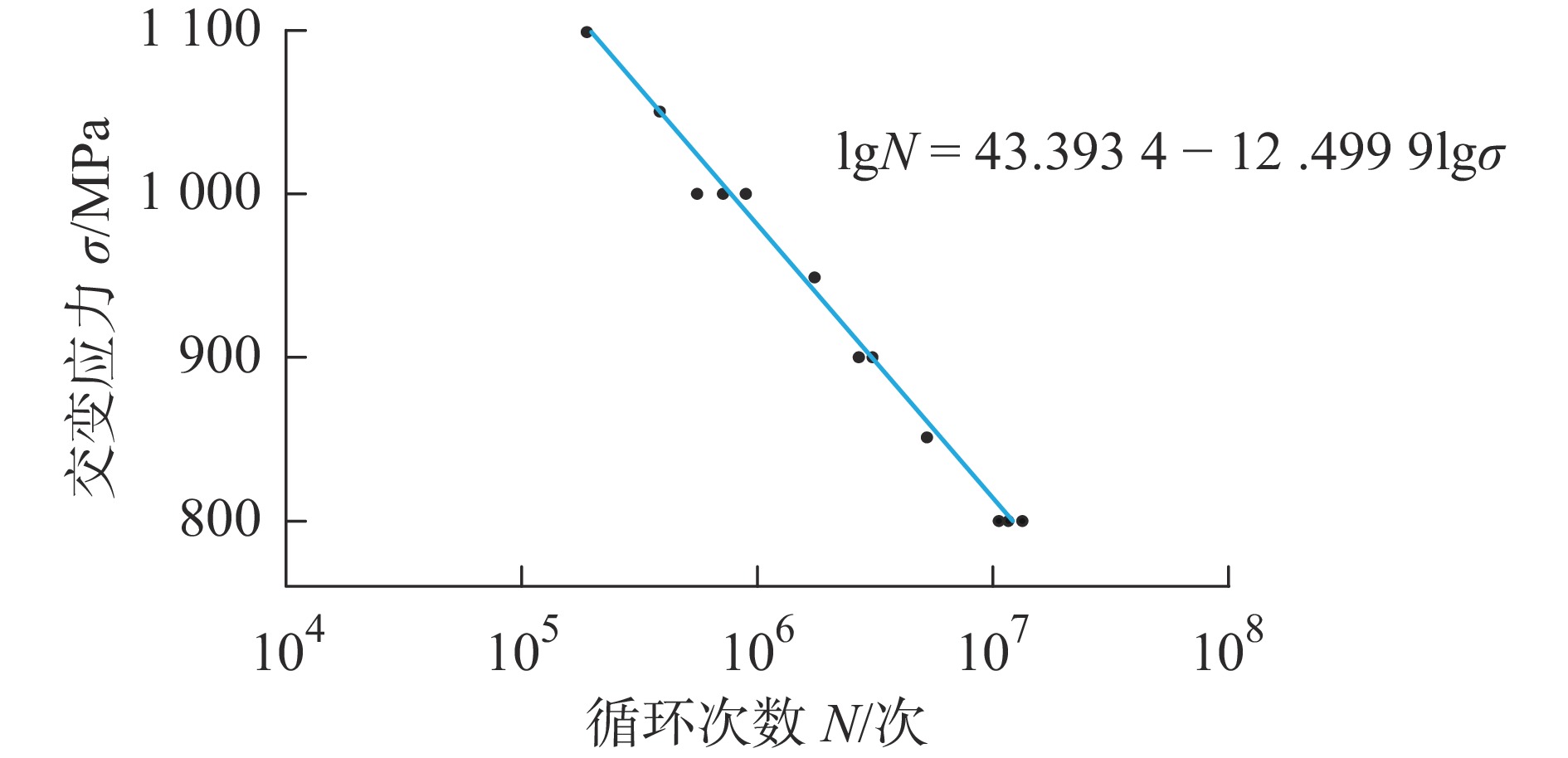
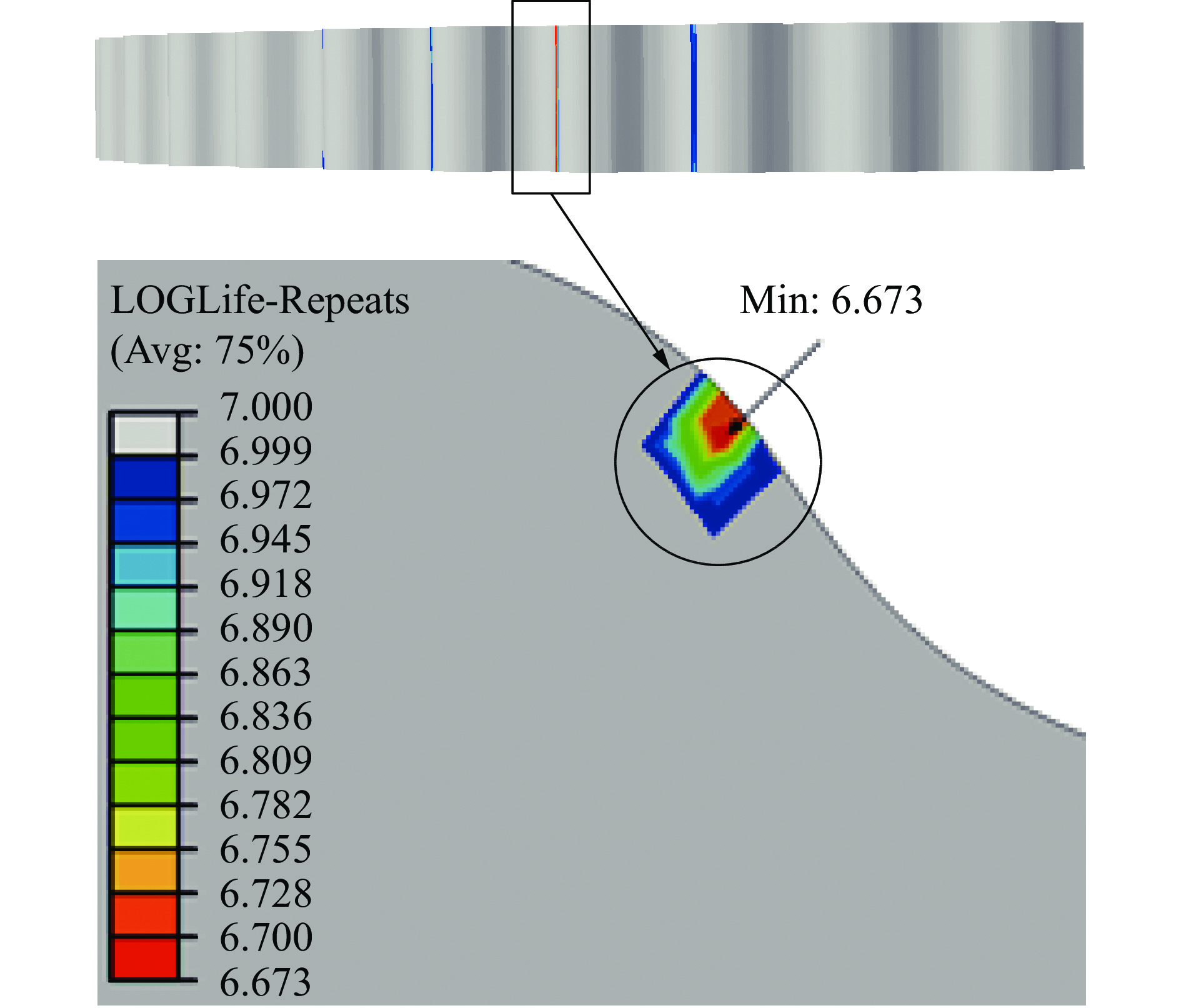
以某型重载RV减速器中的摆线针轮为研究对象,利用有限元分析软件建立轮齿接触等效模型,得到了摆线轮齿面的接触应力分布并分析了其最大接触应力区,基于刚柔耦合动力学建模,得到了最大接触应力区的应力-时间历程。采用疲劳累计损伤理论,基于疲劳寿命专用仿真软件,以有限元结果和载荷谱为输入,分析了摆线针轮在相应外部循环载荷作用下的最终寿命,研究结果表明:摆线轮最大应力部位和危险部位在分度圆附近且靠近端面,最大应力为817 MPa,疲劳寿命为106.673次,等效寿命为5 233 h,为摆线轮的抗疲劳优化设计提供了参考价值。
以某型重载RV减速器中的摆线针轮为研究对象,利用有限元分析软件建立轮齿接触等效模型,得到了摆线轮齿面的接触应力分布并分析了其最大接触应力区,基于刚柔耦合动力学建模,得到了最大接触应力区的应力-时间历程。采用疲劳累计损伤理论,基于疲劳寿命专用仿真软件,以有限元结果和载荷谱为输入,分析了摆线针轮在相应外部循环载荷作用下的最终寿命,研究结果表明:摆线轮最大应力部位和危险部位在分度圆附近且靠近端面,最大应力为817 MPa,疲劳寿命为106.673次,等效寿命为5 233 h,为摆线轮的抗疲劳优化设计提供了参考价值。







2023, 42(3): 382-387.
doi: 10.13433/j.cnki.1003-8728.20200646
摘要:
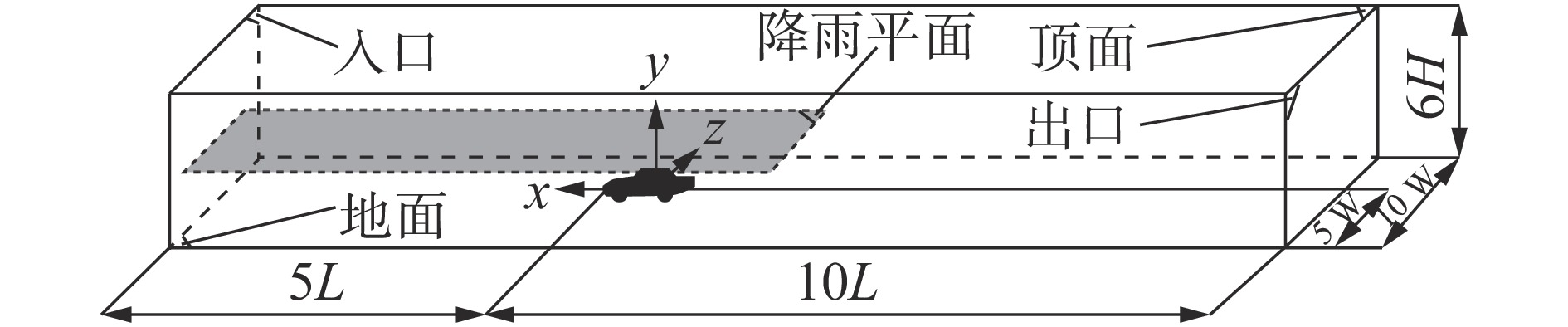
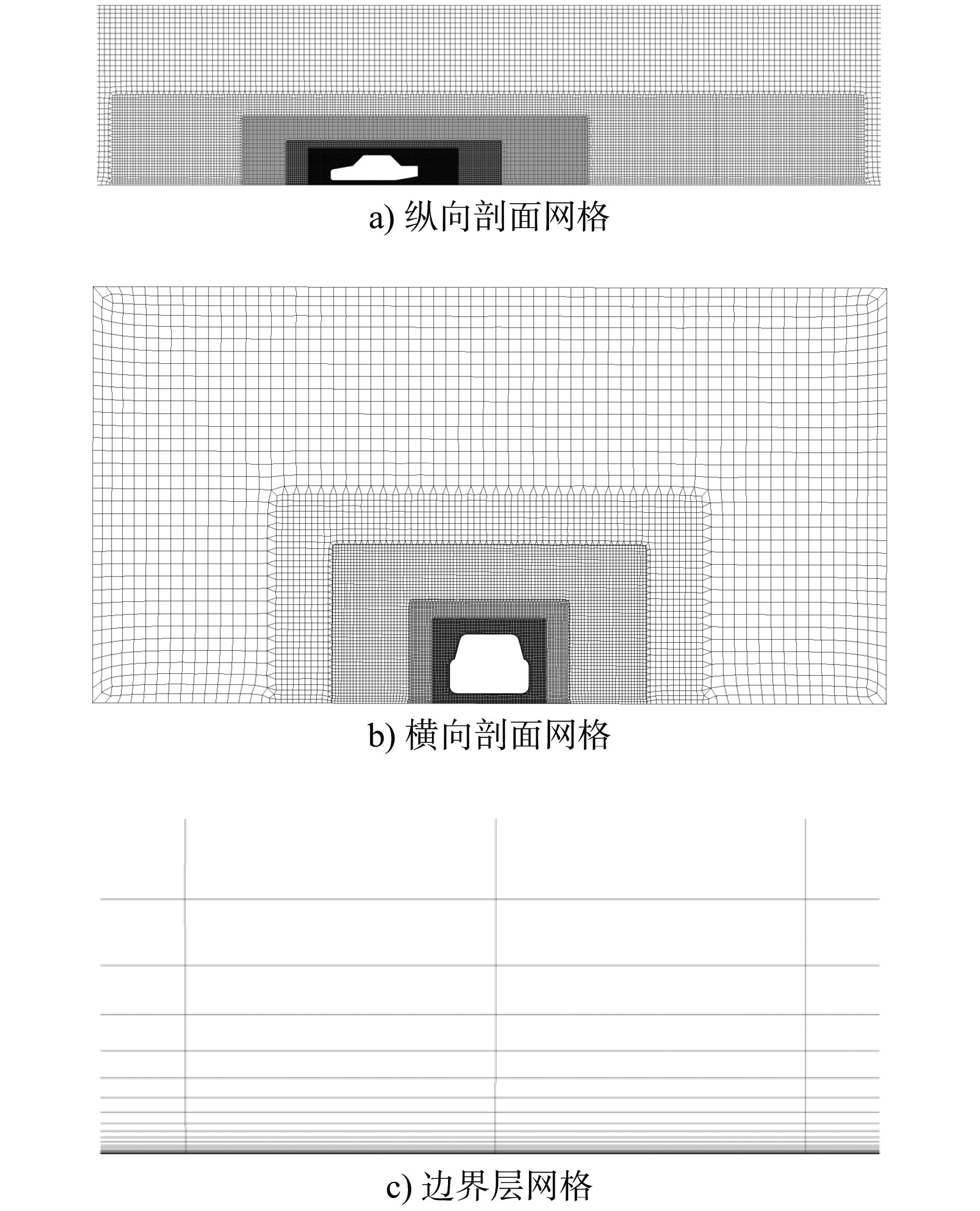
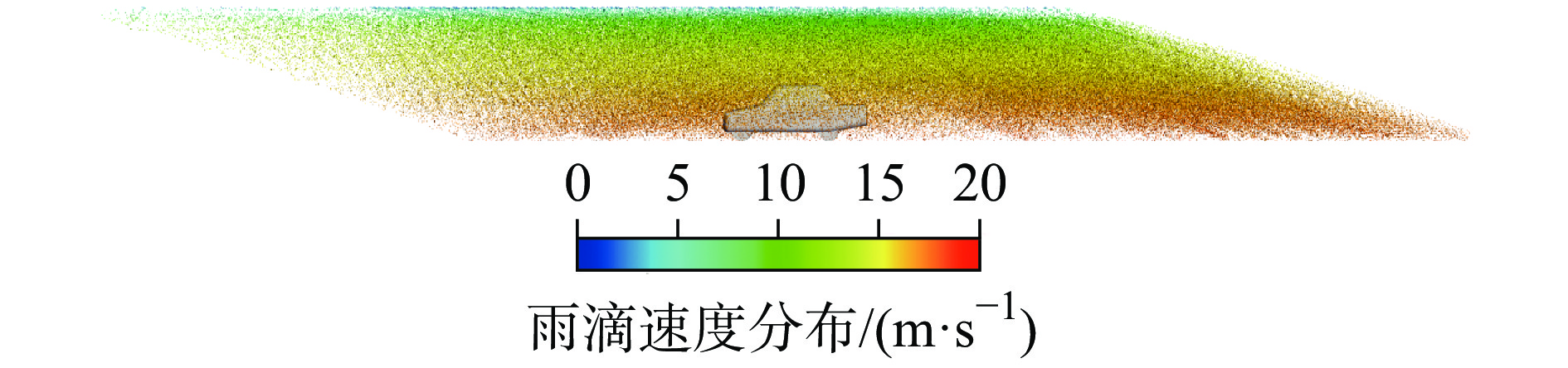
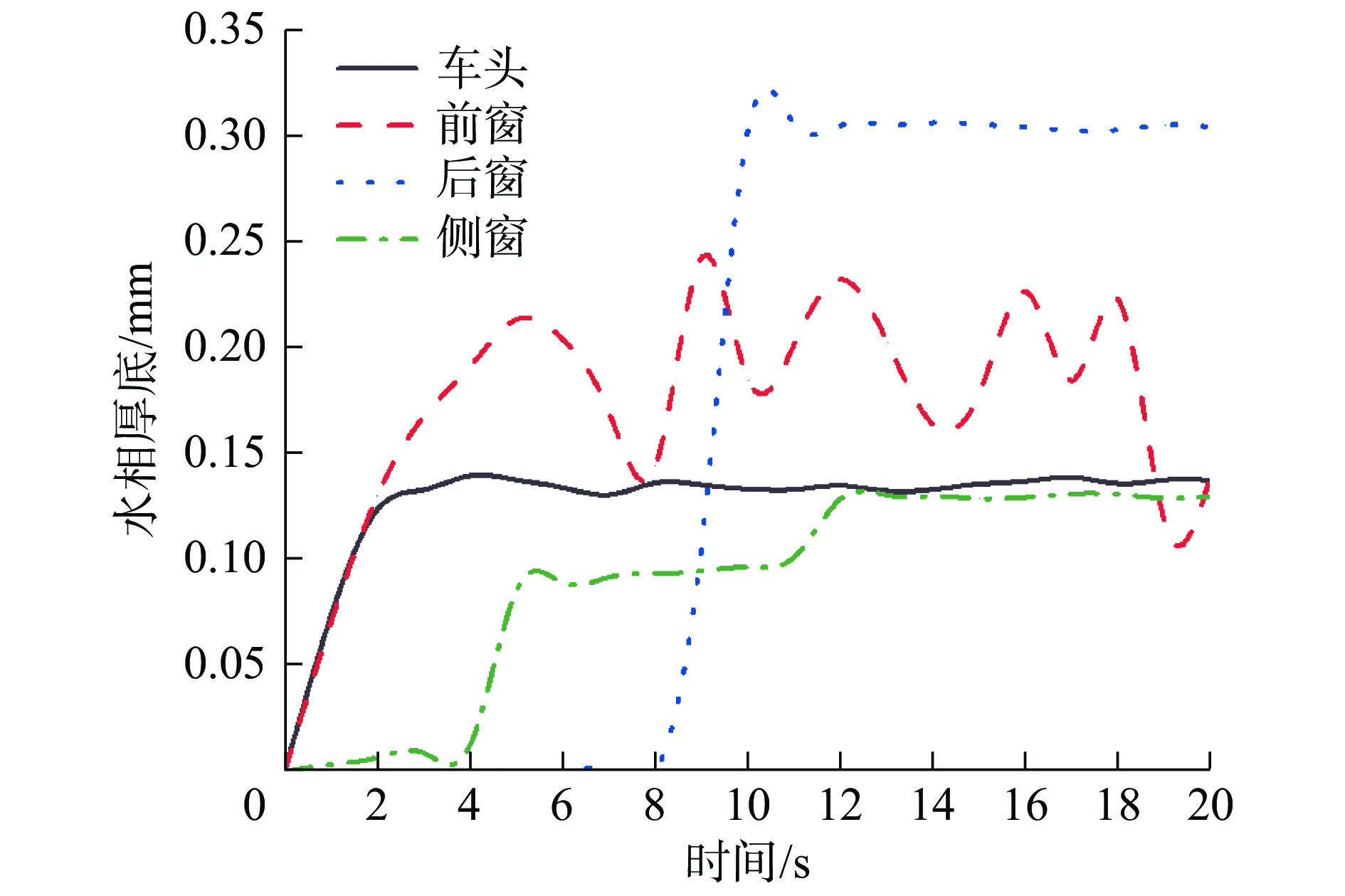
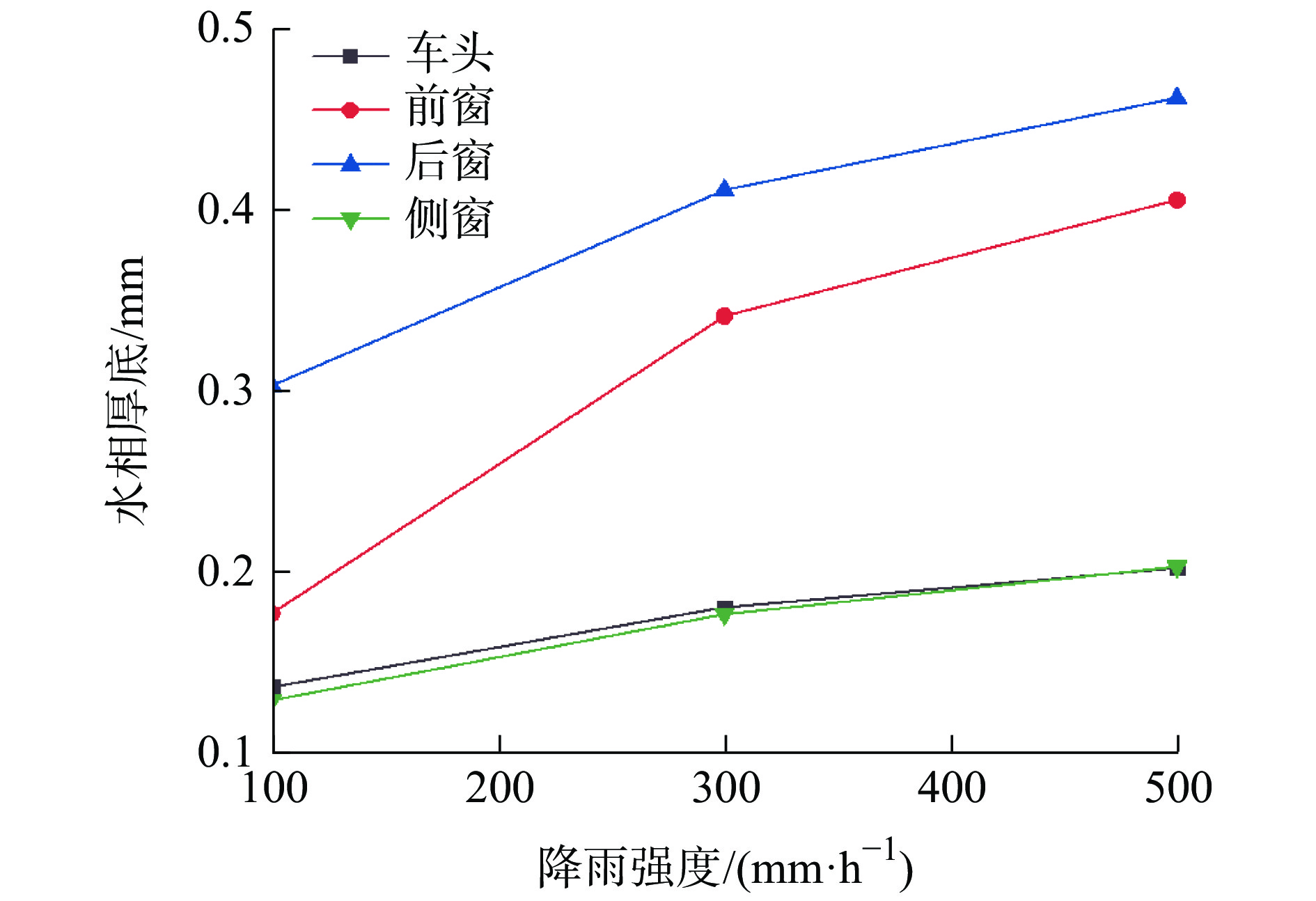
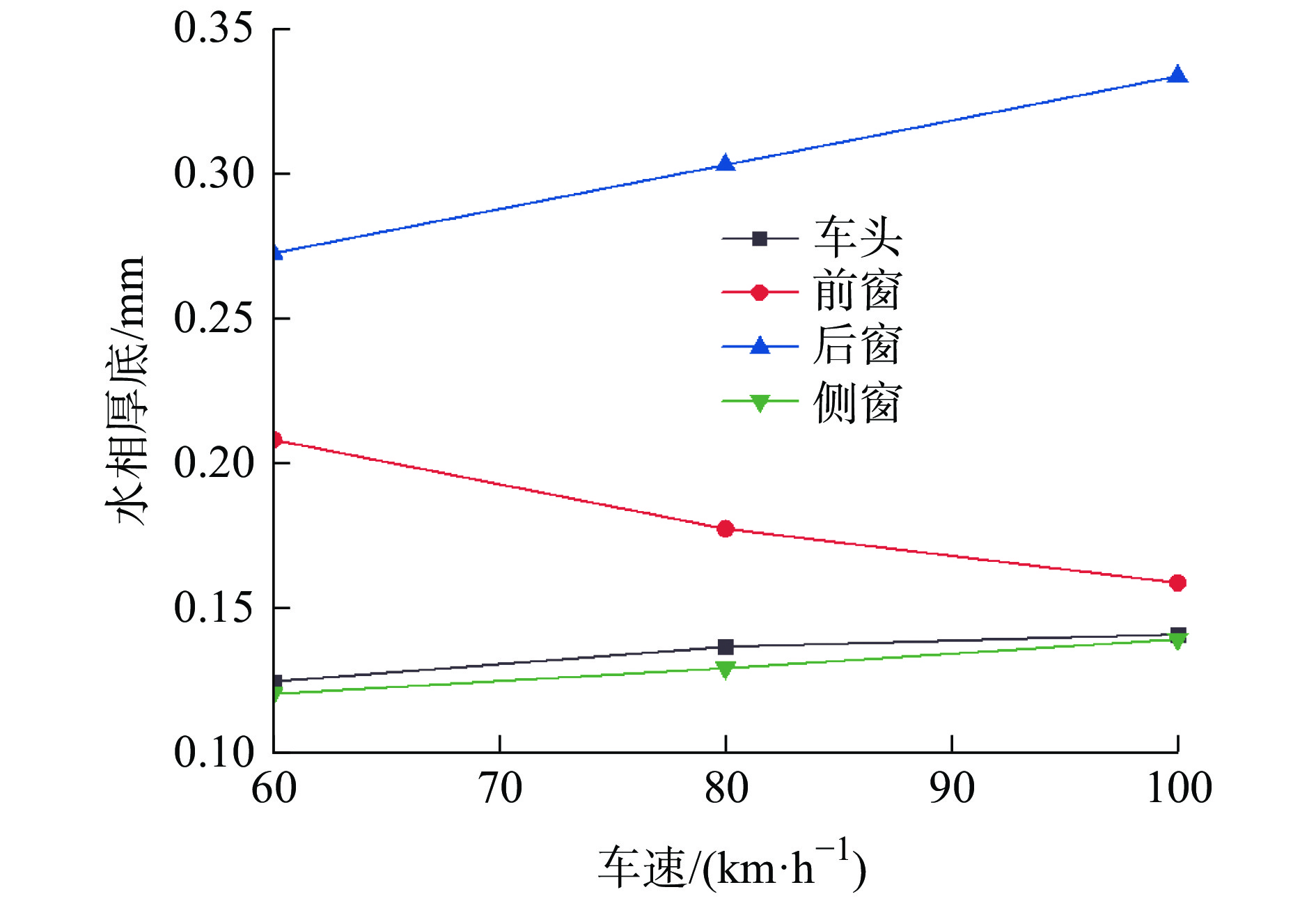
本文建立了汽车外流场空气动力学数值计算模型,结合 Lagrangian discrete phase model和Eulerian wall film model两种方法模拟了水相的生成和发展过程。在此基础上,开展不同降雨强度、不同车速条件下的车身表面水相生成计算,研究影响水相分布变化的因素。研究结果表明:在一定的车速和降雨强度条件下,车身水相厚度逐渐增大,最终趋于稳定;当车速一定时,车头、前窗、后窗和侧窗区域水相厚度随降雨强度的增大而增大;当降雨强度一定时,车头、后窗和侧窗水相厚度随车速增大而增大,而前窗水相厚度随车速增大而减小。
本文建立了汽车外流场空气动力学数值计算模型,结合 Lagrangian discrete phase model和Eulerian wall film model两种方法模拟了水相的生成和发展过程。在此基础上,开展不同降雨强度、不同车速条件下的车身表面水相生成计算,研究影响水相分布变化的因素。研究结果表明:在一定的车速和降雨强度条件下,车身水相厚度逐渐增大,最终趋于稳定;当车速一定时,车头、前窗、后窗和侧窗区域水相厚度随降雨强度的增大而增大;当降雨强度一定时,车头、后窗和侧窗水相厚度随车速增大而增大,而前窗水相厚度随车速增大而减小。



2023, 42(3): 388-395.
doi: 10.13433/j.cnki.1003-8728.20200596
摘要:
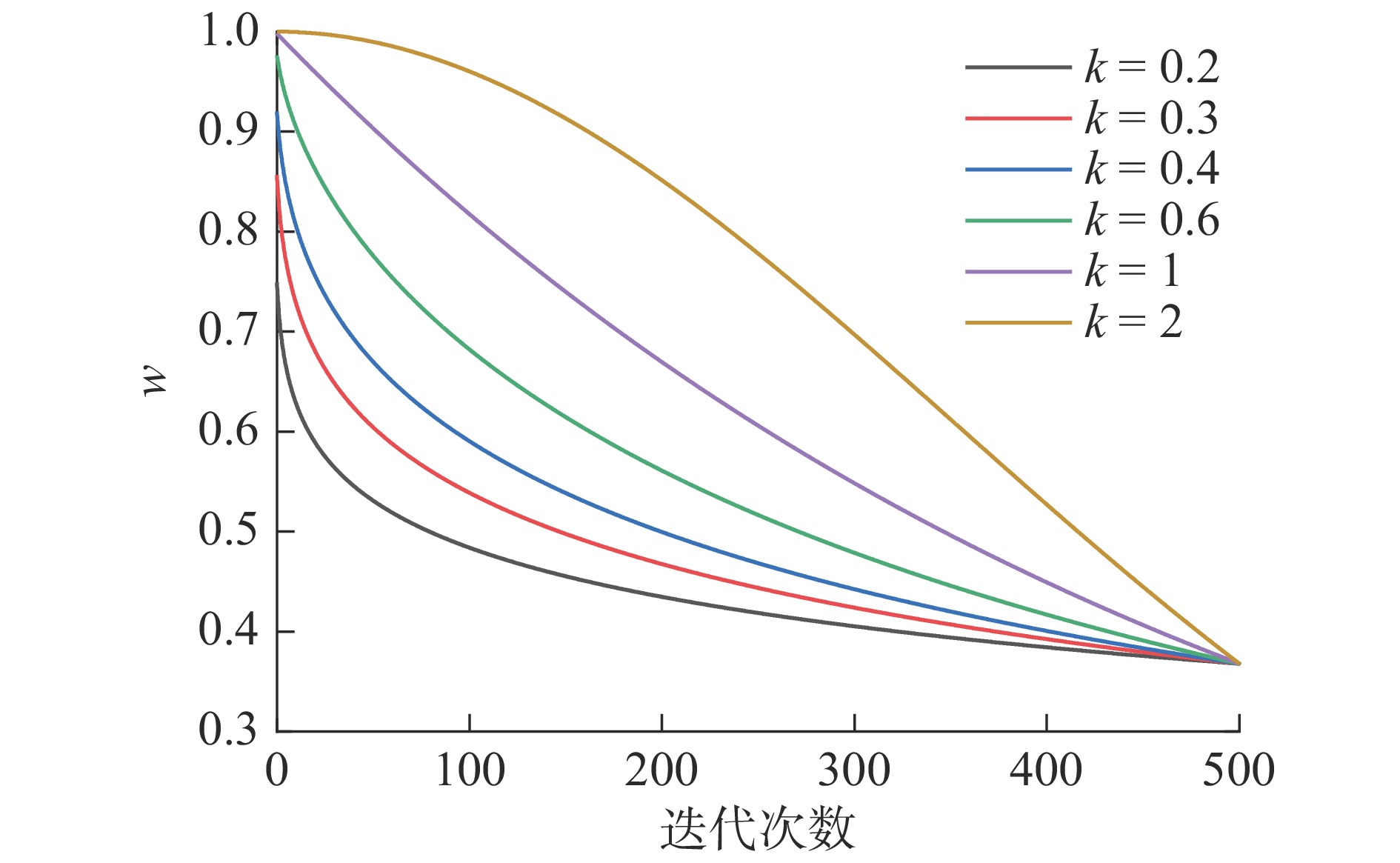
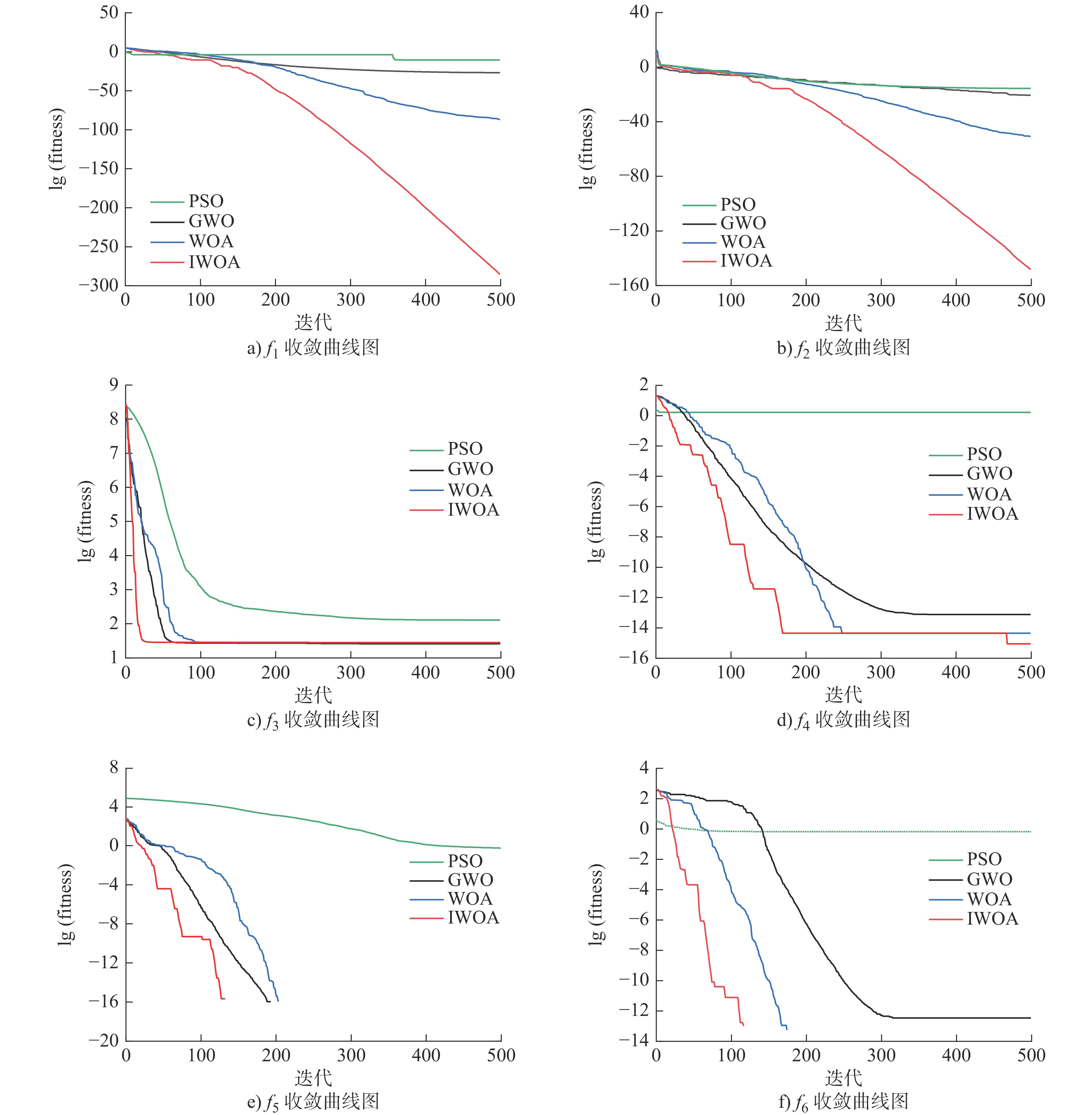
针对机械臂时间最优轨迹规划问题,提出一种改进鲸鱼优化算法的最优轨迹规划方法。首先把机械臂各个关节的角度、角速度、角加速度作为约束参数,在关节空间中采用五次多项式插值构造机械臂的轨迹,然后建立以机械臂运行时间最优为目标的目标函数,采用改进的鲸鱼优化算法(IWOA)来对时间进行优化,提高机械臂的运行效率。最后通过MATLAB进行仿真,结果表明,改进的鲸鱼优化算法相较于其它同类算法求解精度更高,收敛速度更快,并且经过IWOA和轨迹优化结合得到的机械臂的位移、速度和加速度曲线都是平滑的且没有明显的突变,验证了该轨迹规划方法的有效性。
针对机械臂时间最优轨迹规划问题,提出一种改进鲸鱼优化算法的最优轨迹规划方法。首先把机械臂各个关节的角度、角速度、角加速度作为约束参数,在关节空间中采用五次多项式插值构造机械臂的轨迹,然后建立以机械臂运行时间最优为目标的目标函数,采用改进的鲸鱼优化算法(IWOA)来对时间进行优化,提高机械臂的运行效率。最后通过MATLAB进行仿真,结果表明,改进的鲸鱼优化算法相较于其它同类算法求解精度更高,收敛速度更快,并且经过IWOA和轨迹优化结合得到的机械臂的位移、速度和加速度曲线都是平滑的且没有明显的突变,验证了该轨迹规划方法的有效性。

2023, 42(3): 396-401.
doi: 10.13433/j.cnki.1003-8728.20230081
摘要:
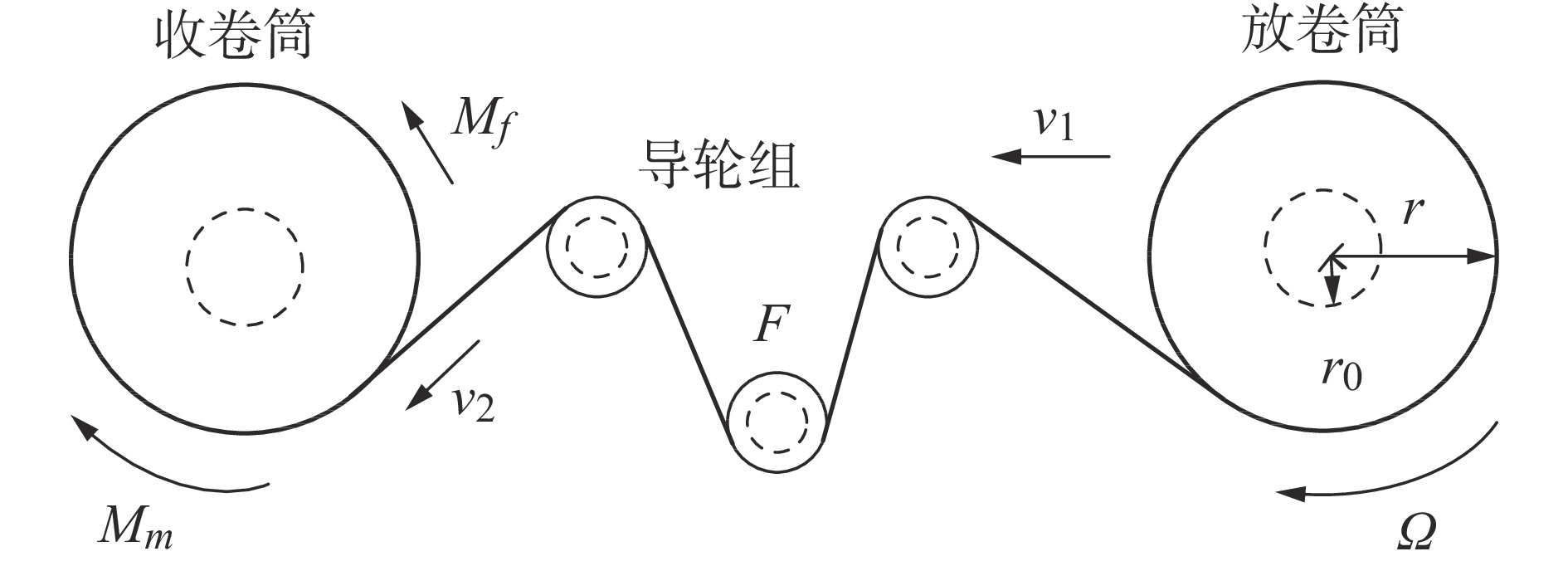
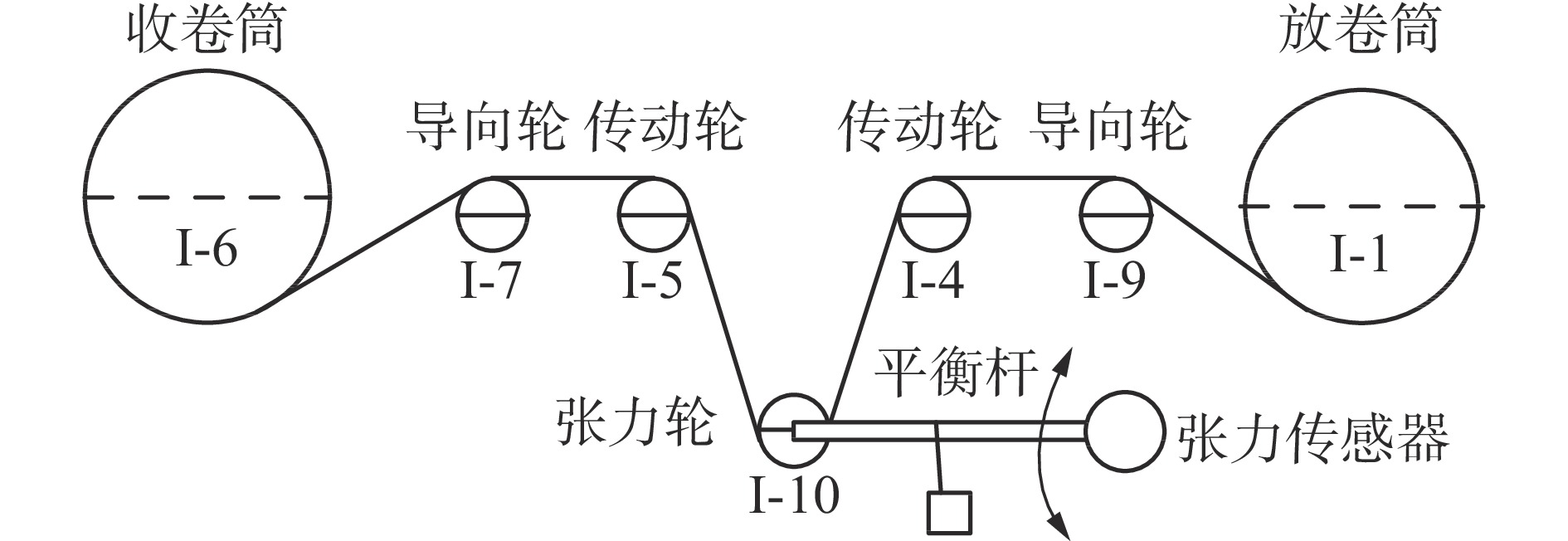
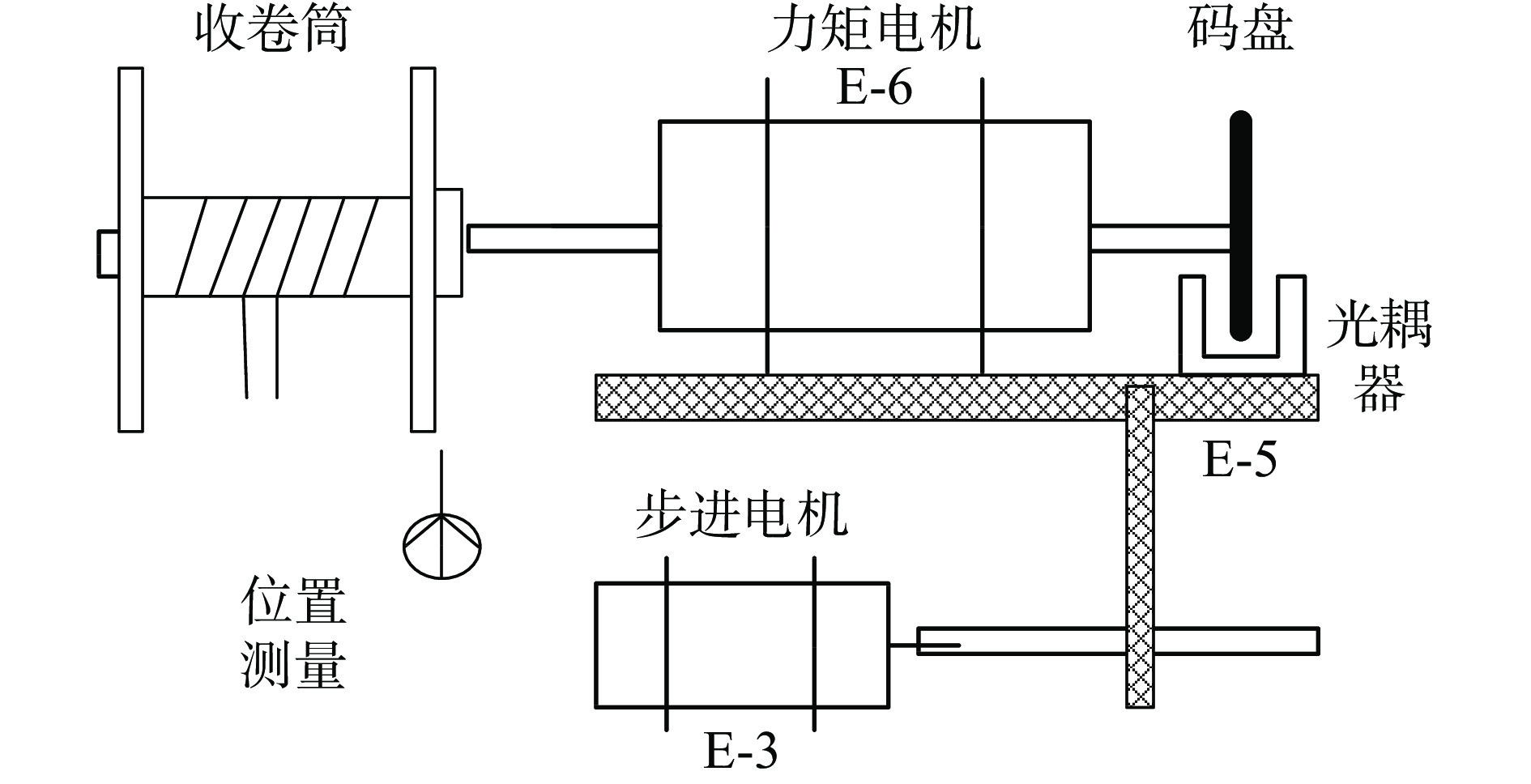
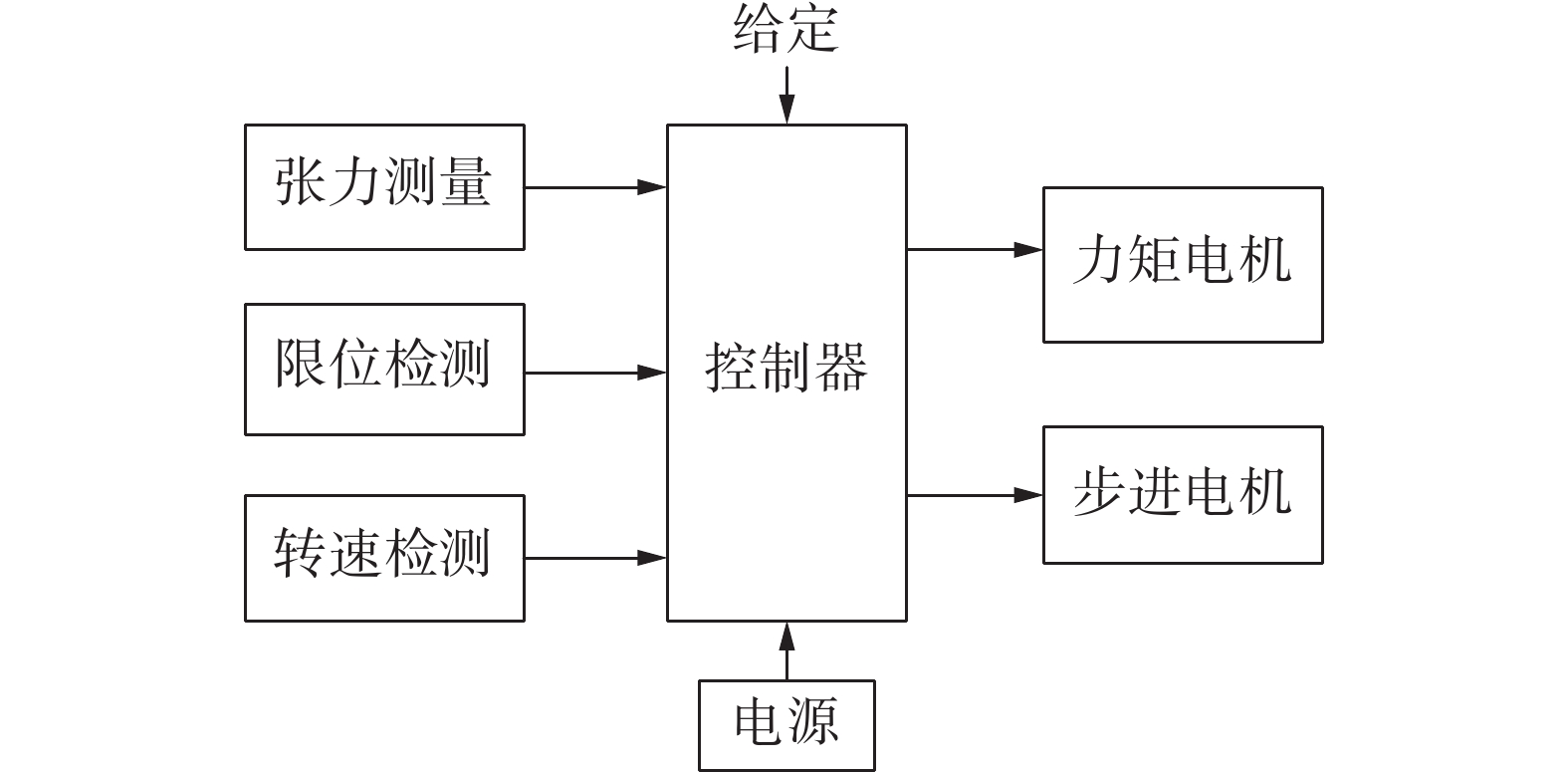
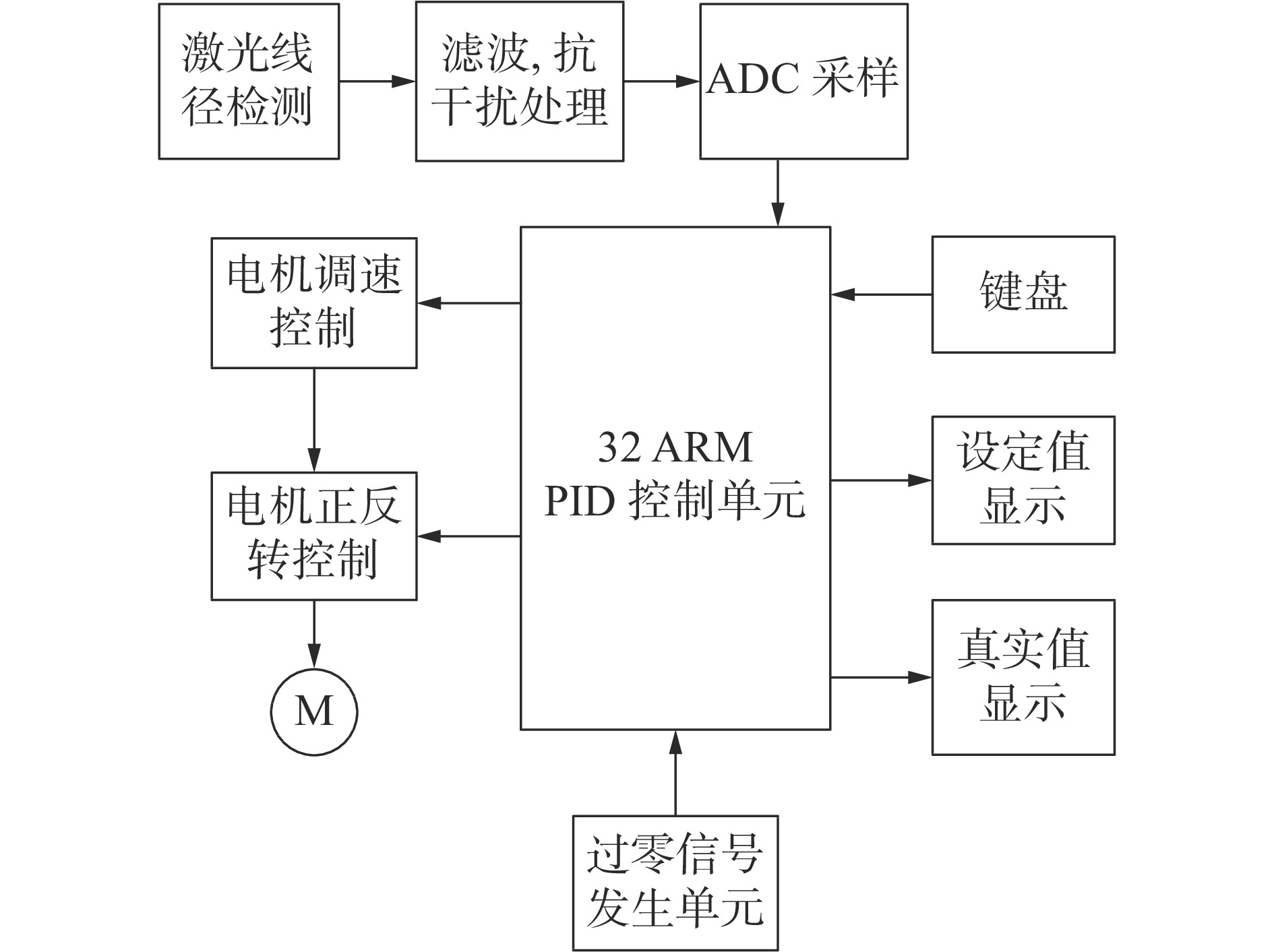
针对金属窄带材卷绕质量要求,设计了一套恒张力控制系统。分析了金属窄带材卷绕生产工艺过程控制中张力产生及其影响因素,在保持恒张力控制的基础上,提出、设计、制作了窄带材卷绕的双闭环、串级、动态控制系统。采用单片机为核心控制单元实现信号采集与控制信号输出,以三相交流力矩电机为主执行机构,结合转速、张力双闭环控制,实现了基于力矩电机的带材卷绕可控恒张力机构;同时以步进电机为辅执行器,以位移检测为反馈量的盘绕机构横移控制;以及以带材厚度为前馈信号的超前控制。通过设计电路图、制作电路板、系统集成应用效果表现出,带材卷绕过程用力均匀,张力稳定,匝间间隙合适,层间松紧适度,盘绕平整、均匀,保证了生产质量。
针对金属窄带材卷绕质量要求,设计了一套恒张力控制系统。分析了金属窄带材卷绕生产工艺过程控制中张力产生及其影响因素,在保持恒张力控制的基础上,提出、设计、制作了窄带材卷绕的双闭环、串级、动态控制系统。采用单片机为核心控制单元实现信号采集与控制信号输出,以三相交流力矩电机为主执行机构,结合转速、张力双闭环控制,实现了基于力矩电机的带材卷绕可控恒张力机构;同时以步进电机为辅执行器,以位移检测为反馈量的盘绕机构横移控制;以及以带材厚度为前馈信号的超前控制。通过设计电路图、制作电路板、系统集成应用效果表现出,带材卷绕过程用力均匀,张力稳定,匝间间隙合适,层间松紧适度,盘绕平整、均匀,保证了生产质量。



2023, 42(3): 402-407.
doi: 10.13433/j.cnki.1003-8728.20200579
摘要:
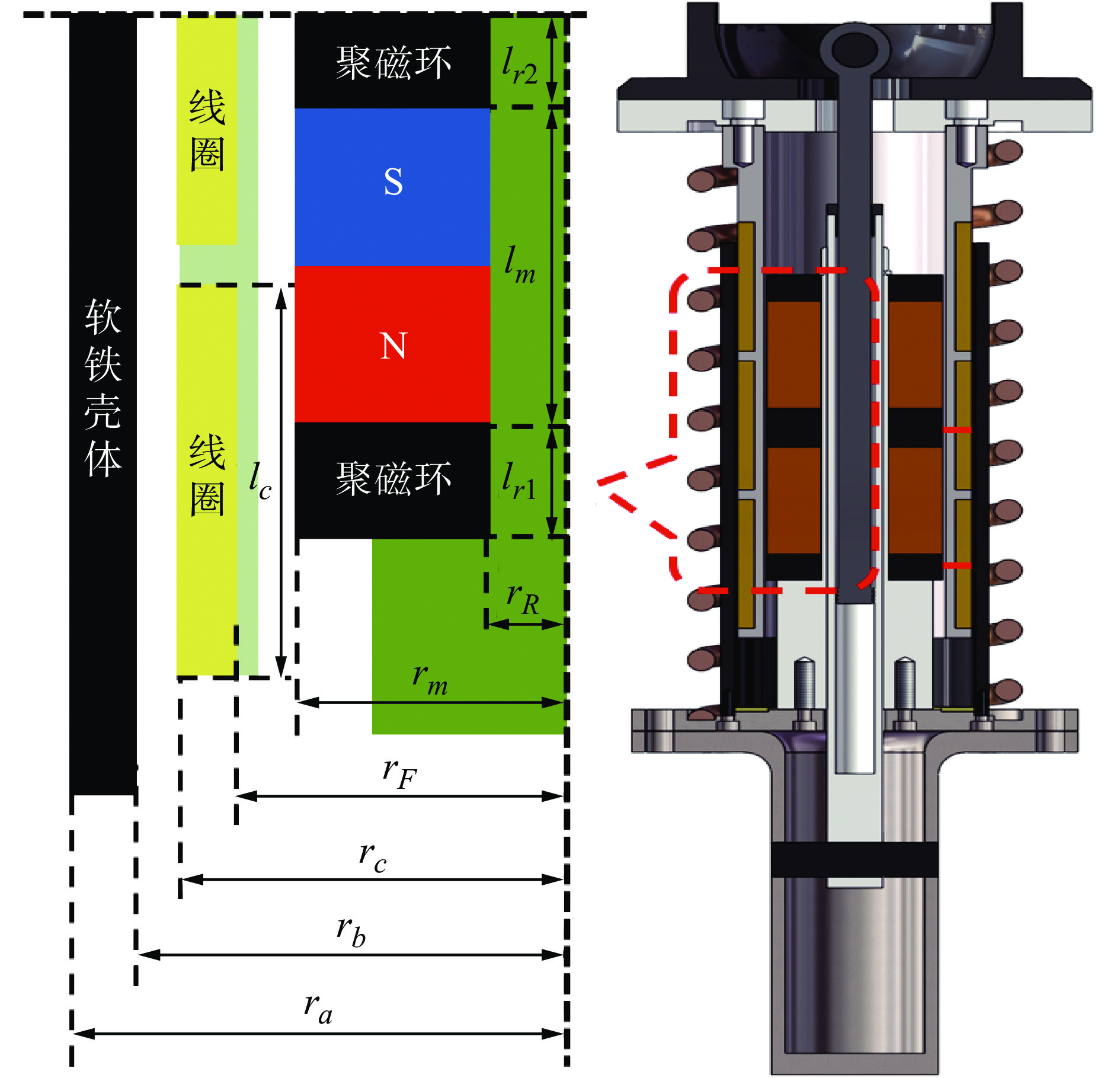
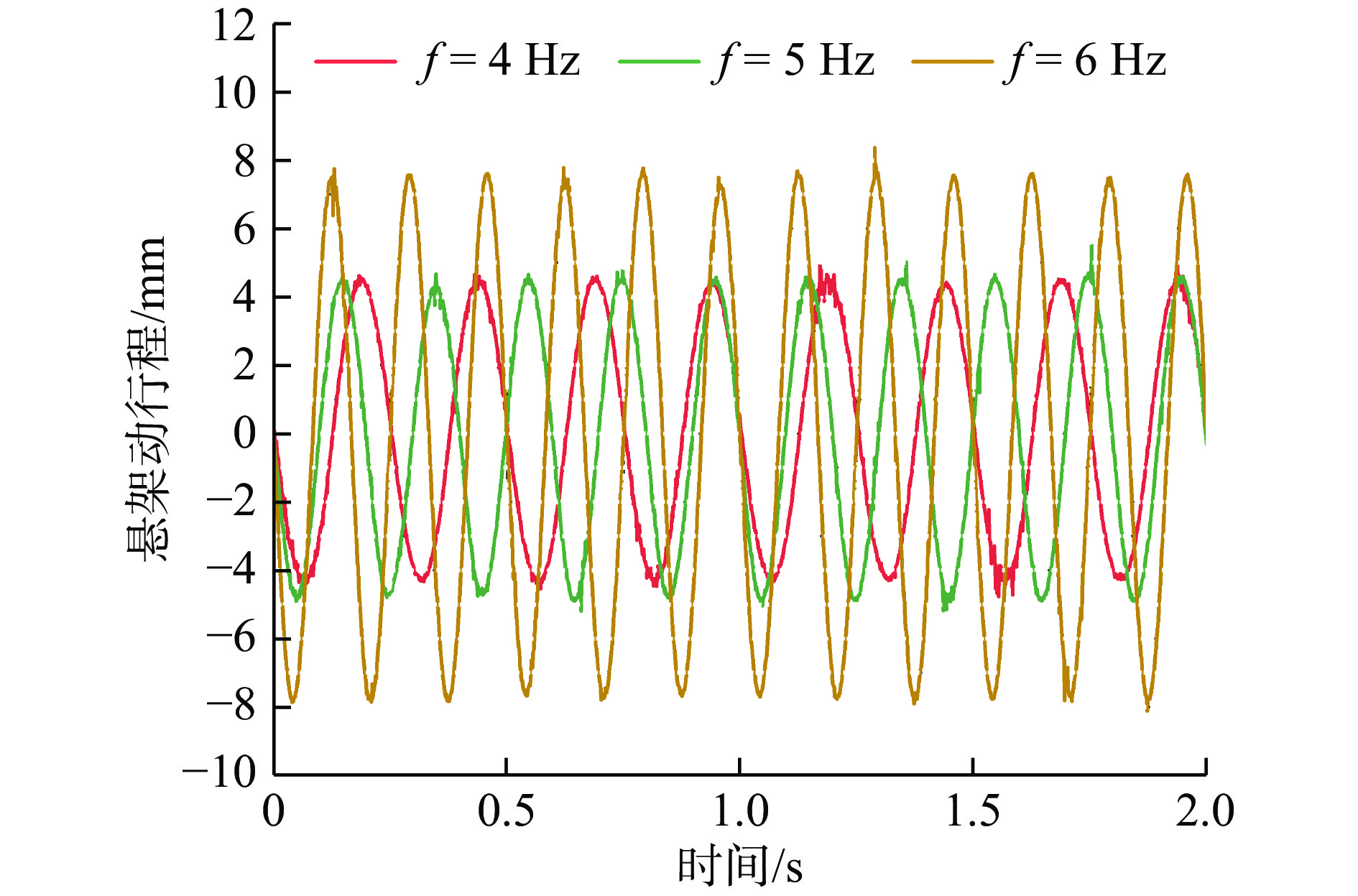
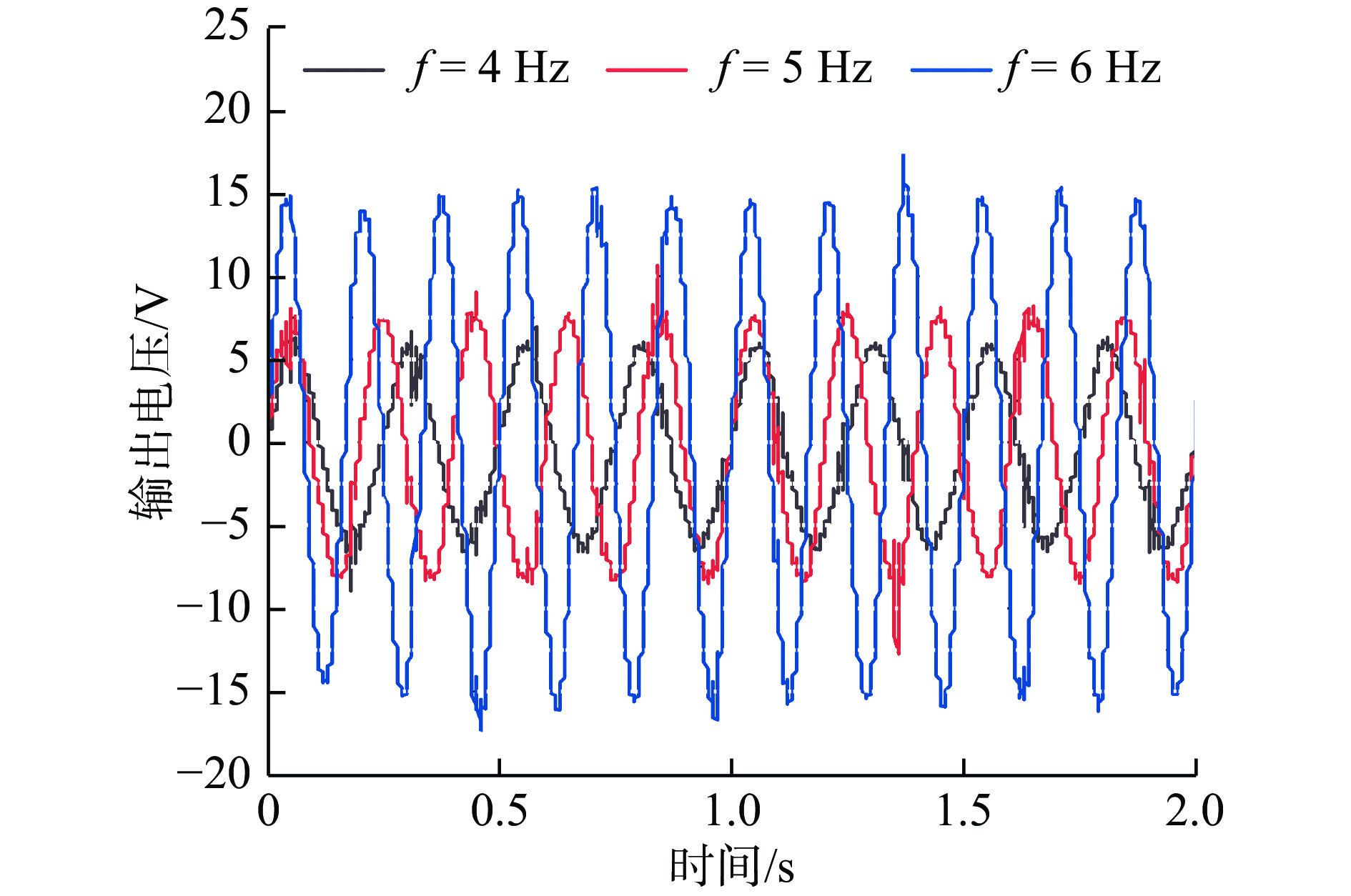
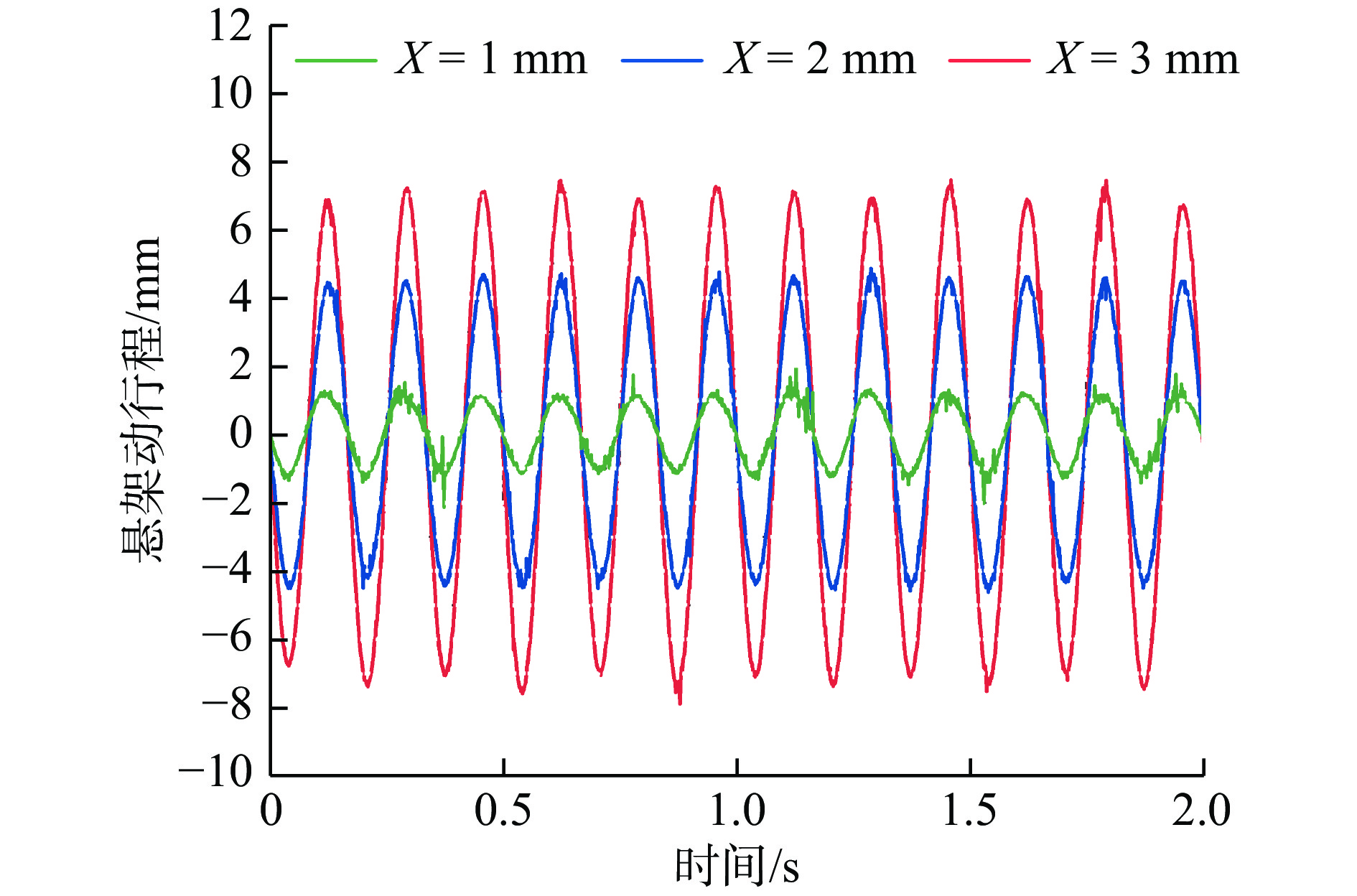
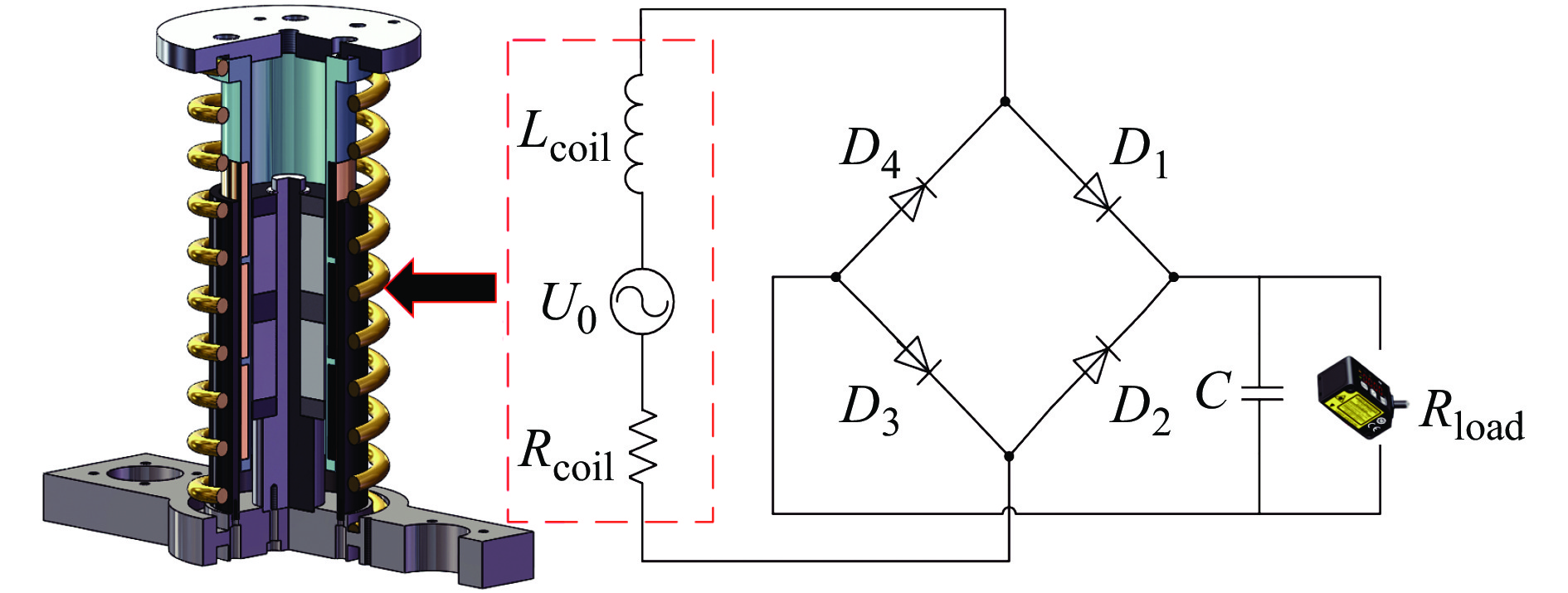
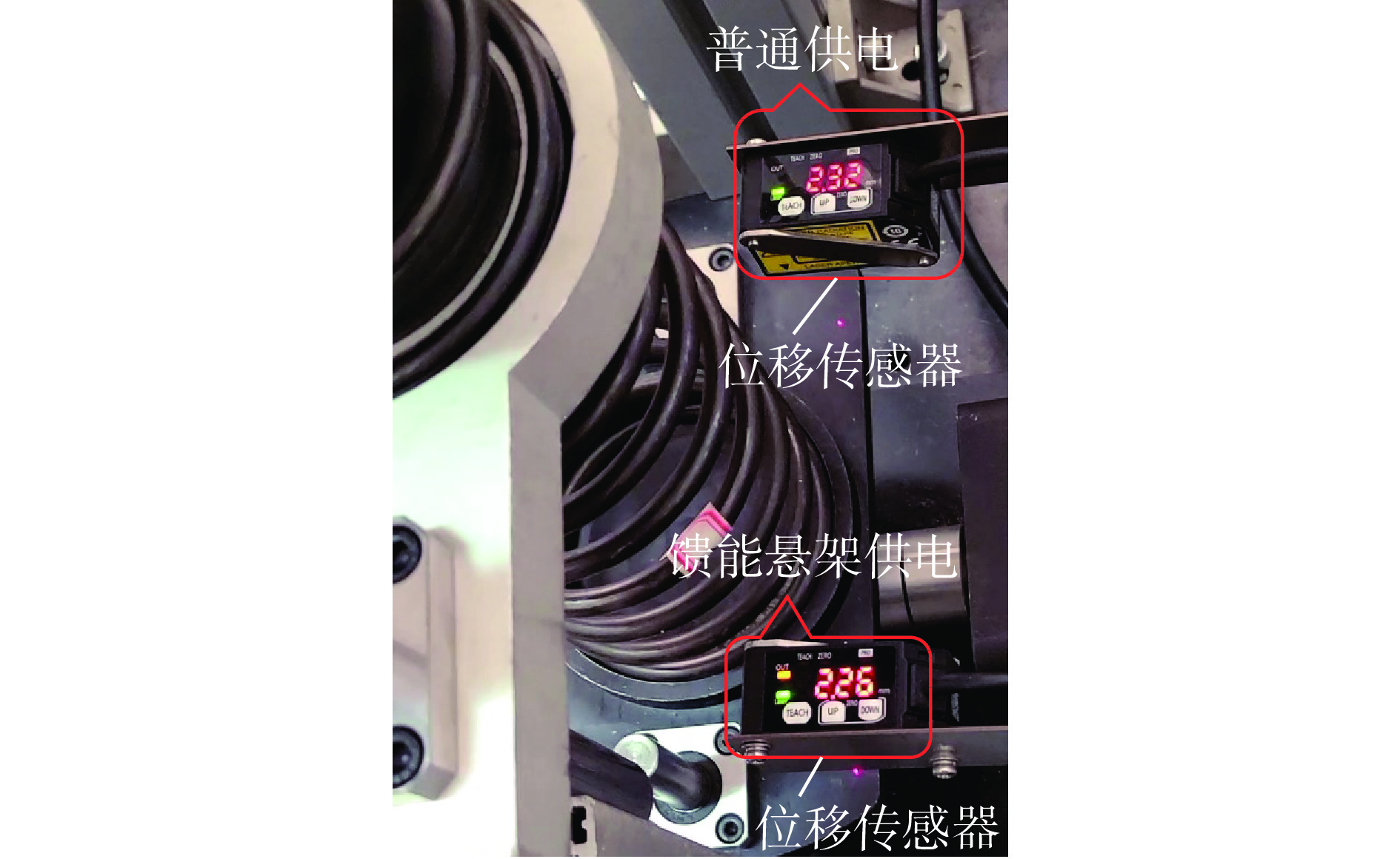
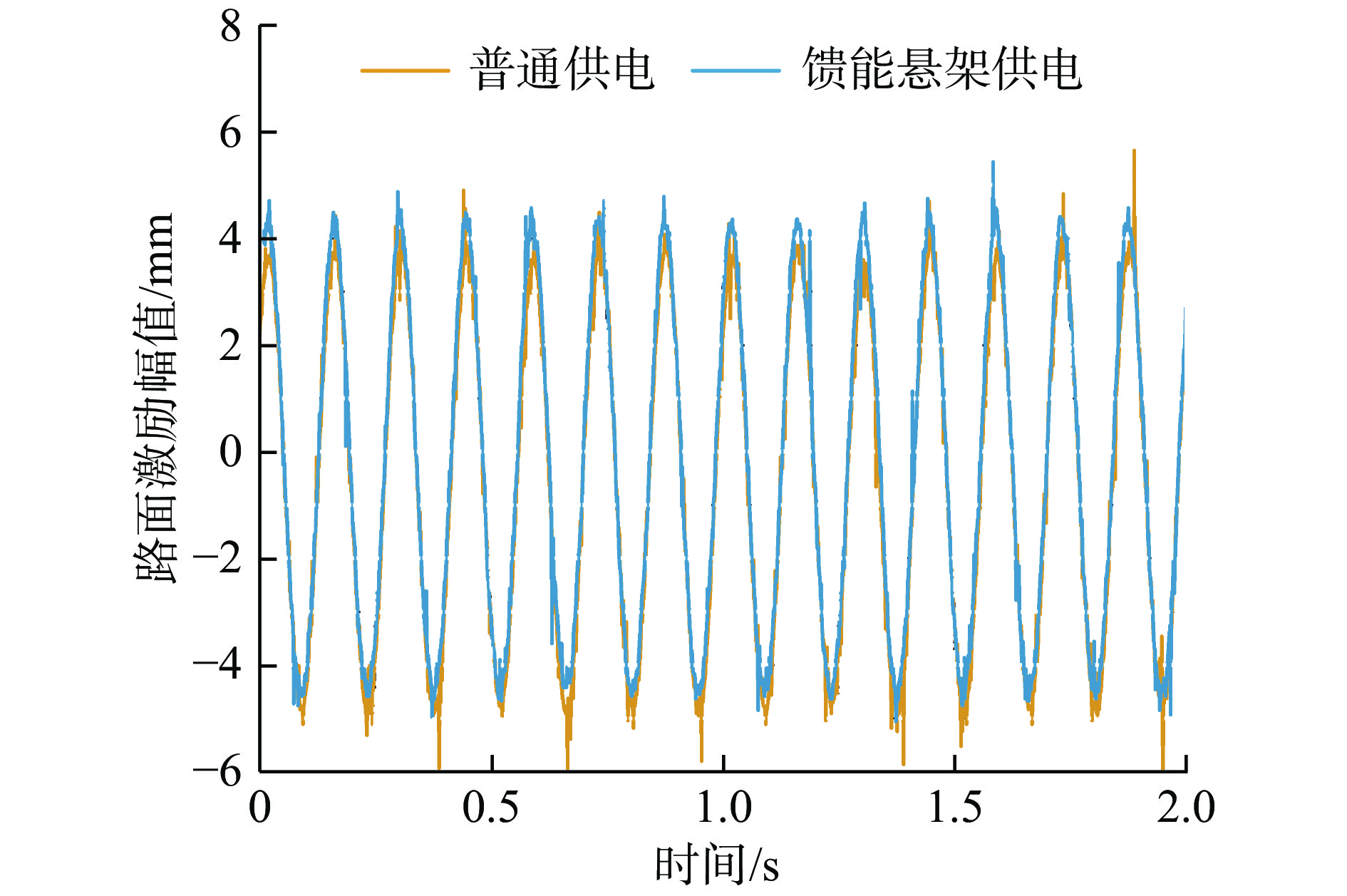
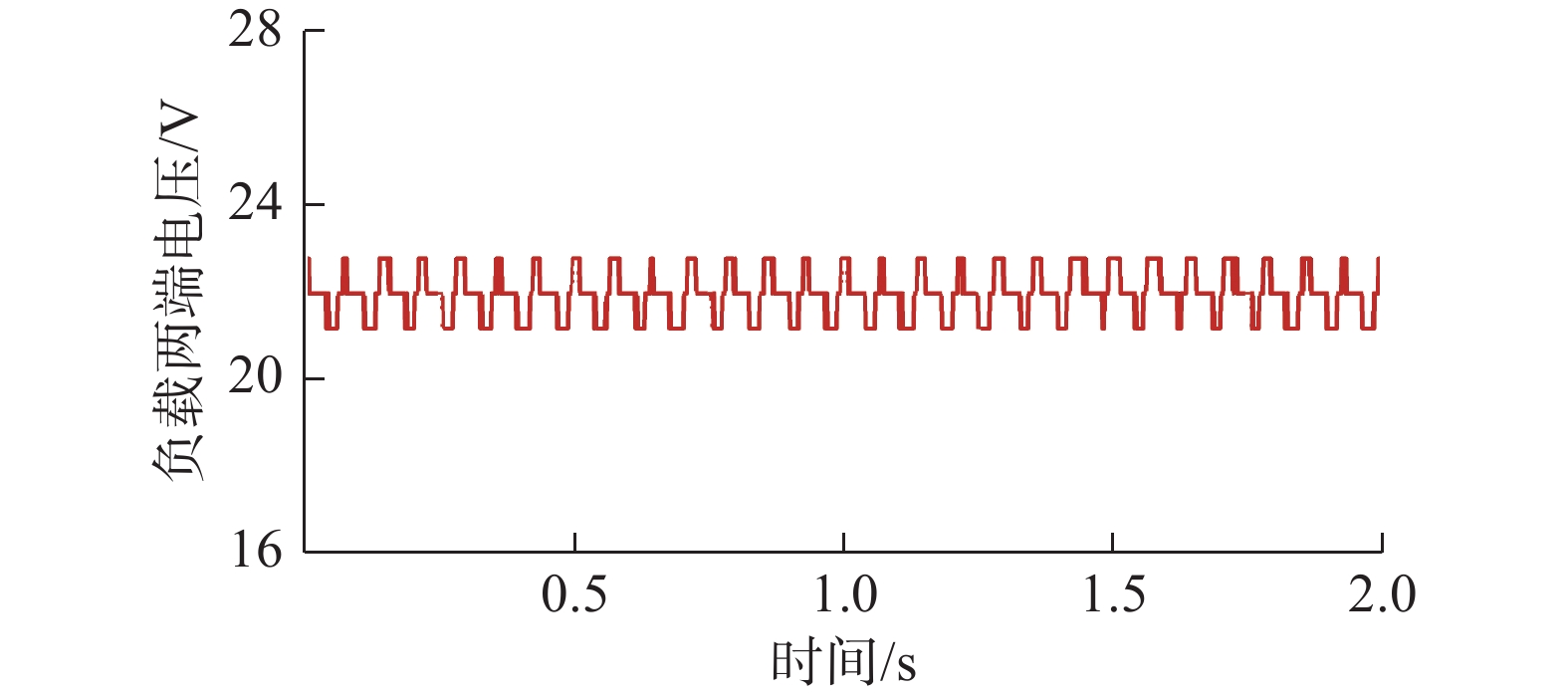
馈能悬架在完成被动悬架相关功能的同时,可实现对振动能量的回收。本文提出了一种在保留原被动悬架弹簧与阻尼结构的基础上,融入法拉第电磁感应馈能元件的磁力馈能悬架结构,保证原有悬架的安全性,同时实现无接触、无摩擦、无需润滑的馈能功能。本文阐述了该馈能悬架的工作原理与基本结构,并对悬架结构进行优化设计。进而研制了磁力馈能悬架的原理样机及馈能实验台架,研究在变频率、变幅值的正弦激励下,悬架系统的输出电压特性。实验结果表明:馈能悬架的输出电压与正弦激励的幅值和频率呈正相关。为了验证馈能悬架的自供电性与实用性,选用传感器作为负载,在7 Hz,4 mm的正弦激励下,馈能悬架可持续输出的电压为22 V成功地为传感器供电。
馈能悬架在完成被动悬架相关功能的同时,可实现对振动能量的回收。本文提出了一种在保留原被动悬架弹簧与阻尼结构的基础上,融入法拉第电磁感应馈能元件的磁力馈能悬架结构,保证原有悬架的安全性,同时实现无接触、无摩擦、无需润滑的馈能功能。本文阐述了该馈能悬架的工作原理与基本结构,并对悬架结构进行优化设计。进而研制了磁力馈能悬架的原理样机及馈能实验台架,研究在变频率、变幅值的正弦激励下,悬架系统的输出电压特性。实验结果表明:馈能悬架的输出电压与正弦激励的幅值和频率呈正相关。为了验证馈能悬架的自供电性与实用性,选用传感器作为负载,在7 Hz,4 mm的正弦激励下,馈能悬架可持续输出的电压为22 V成功地为传感器供电。





2023, 42(3): 408-414.
doi: 10.13433/j.cnki.1003-8728.20200615
摘要:
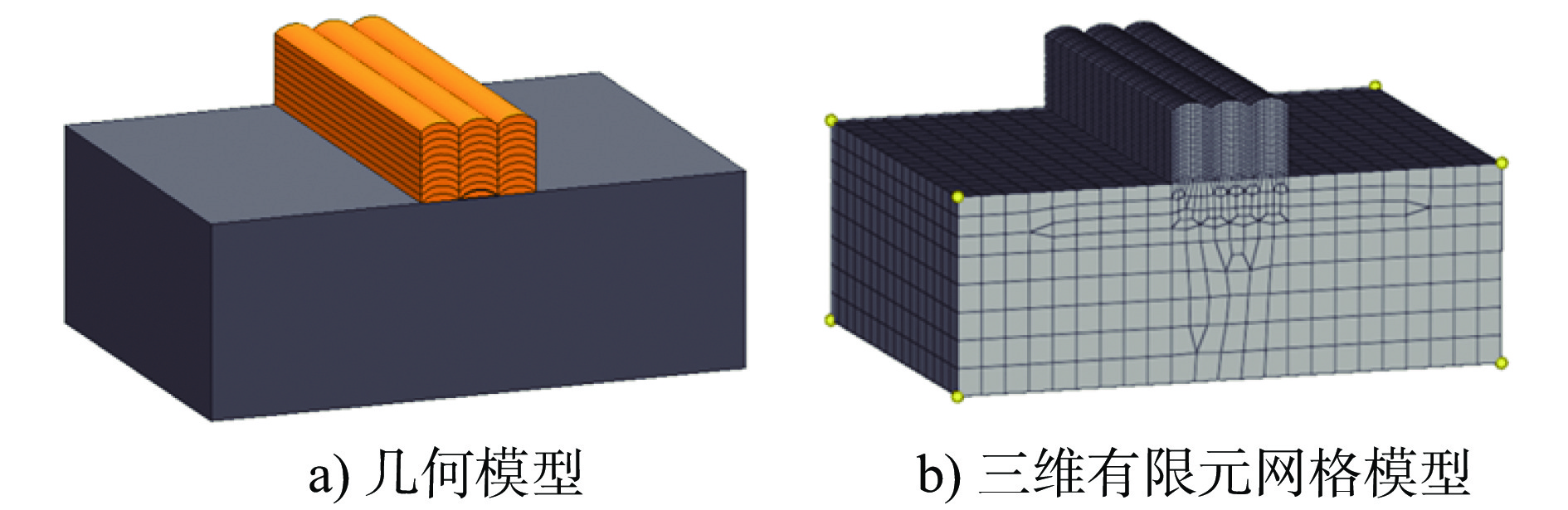
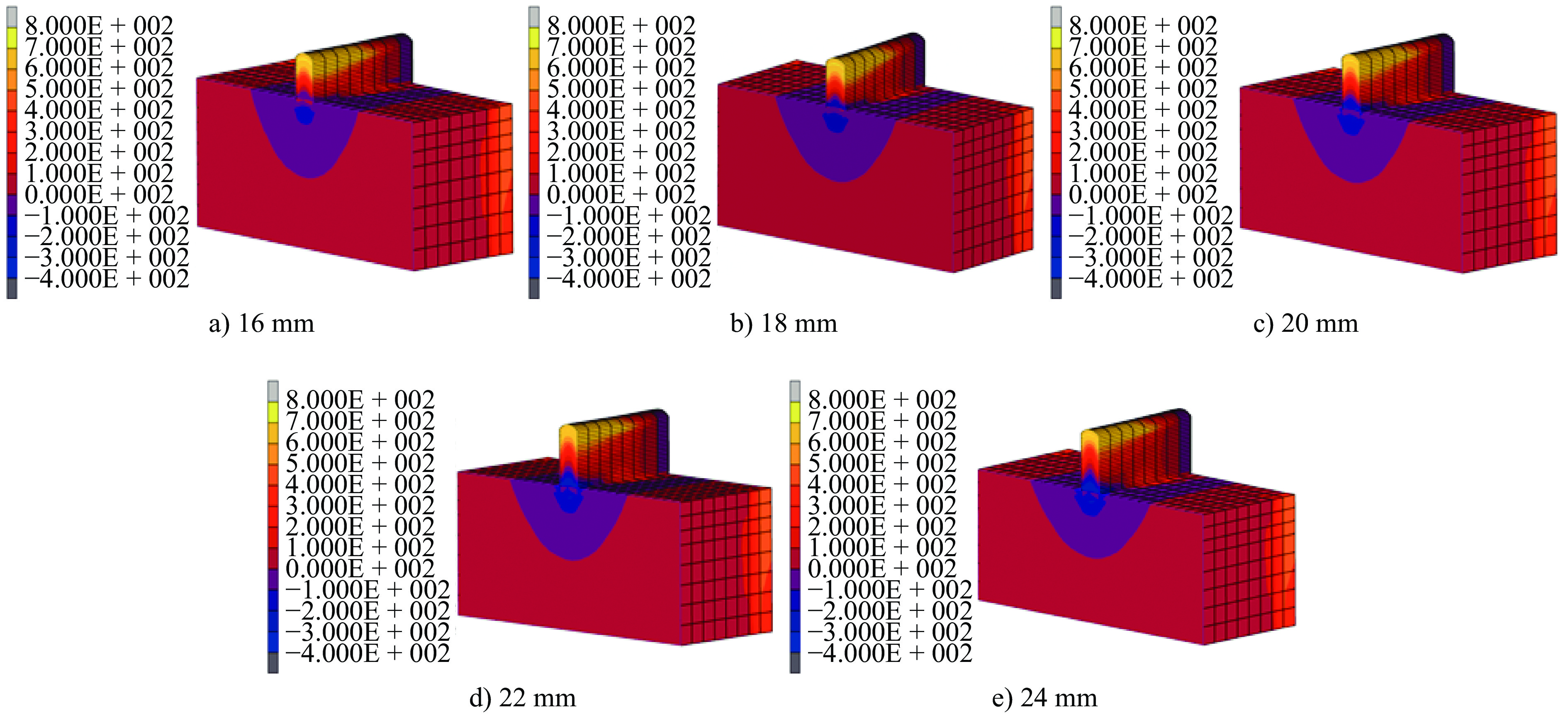
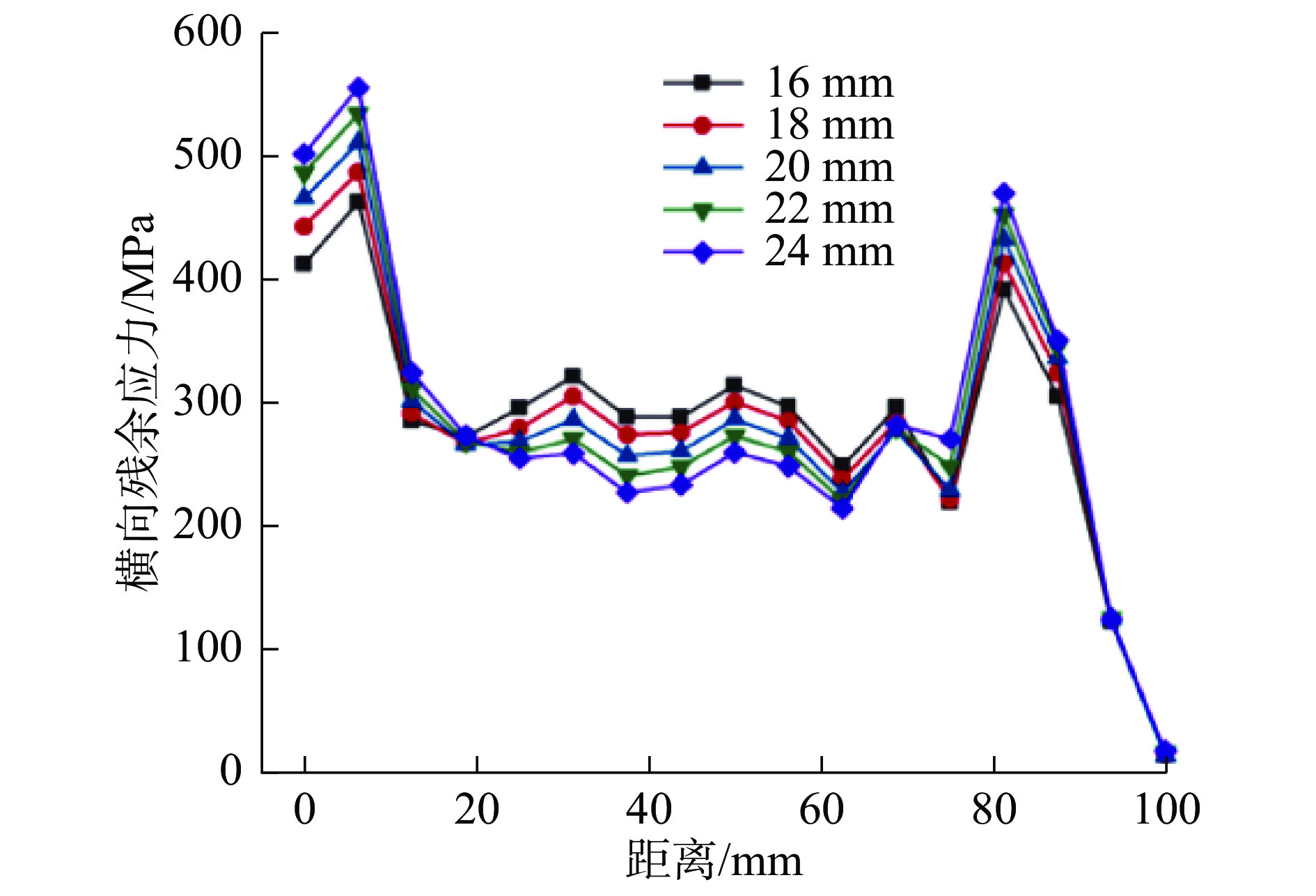
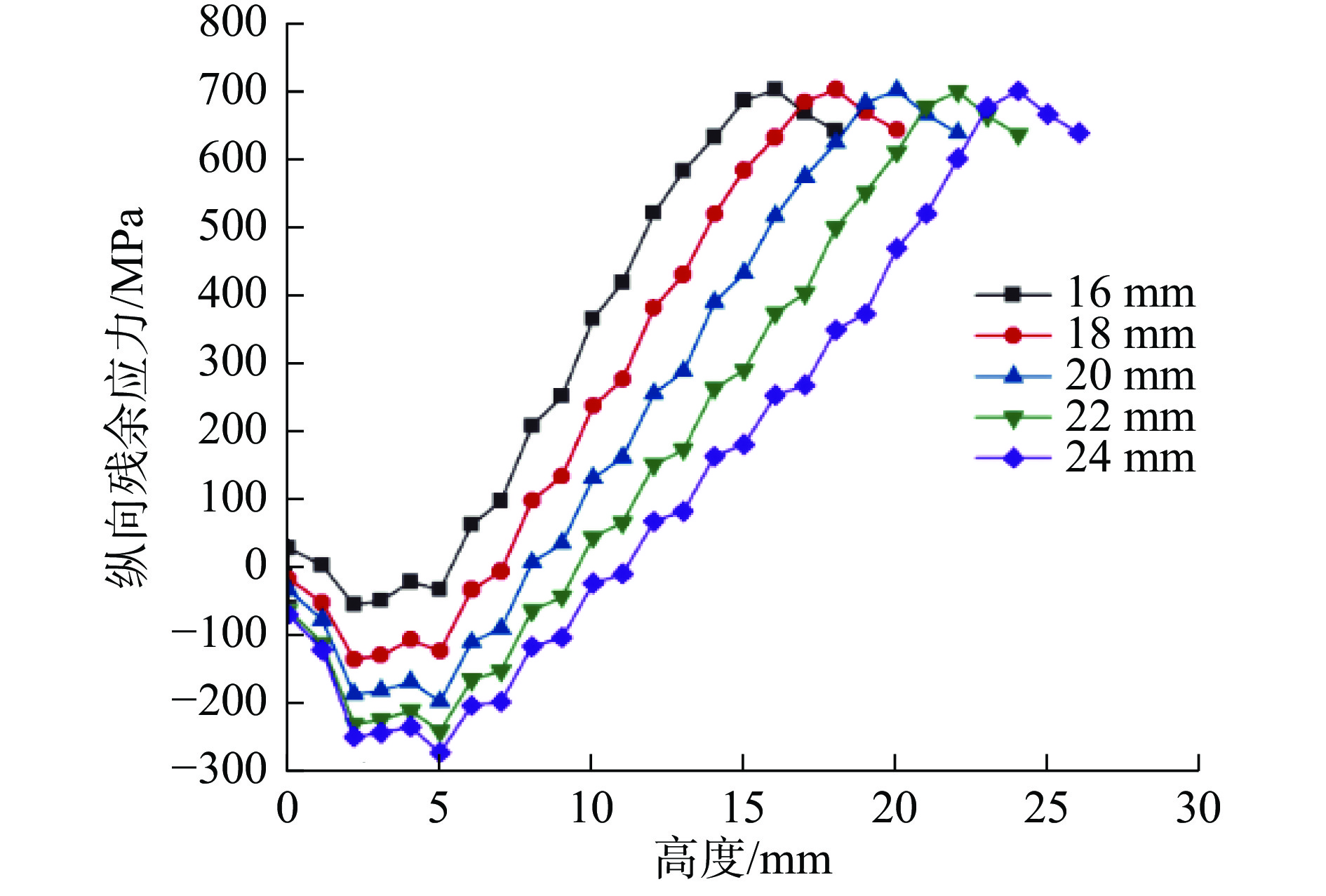
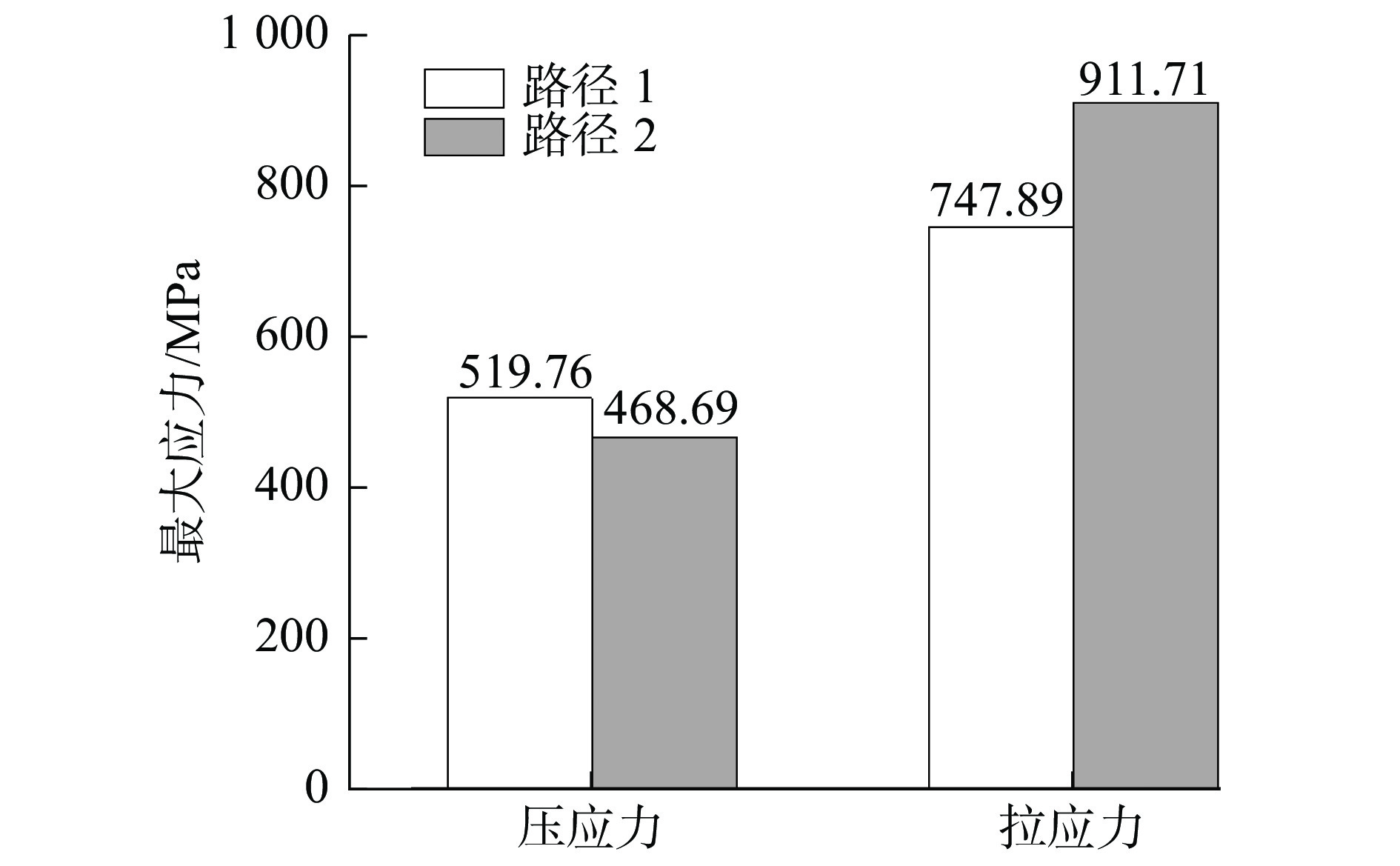
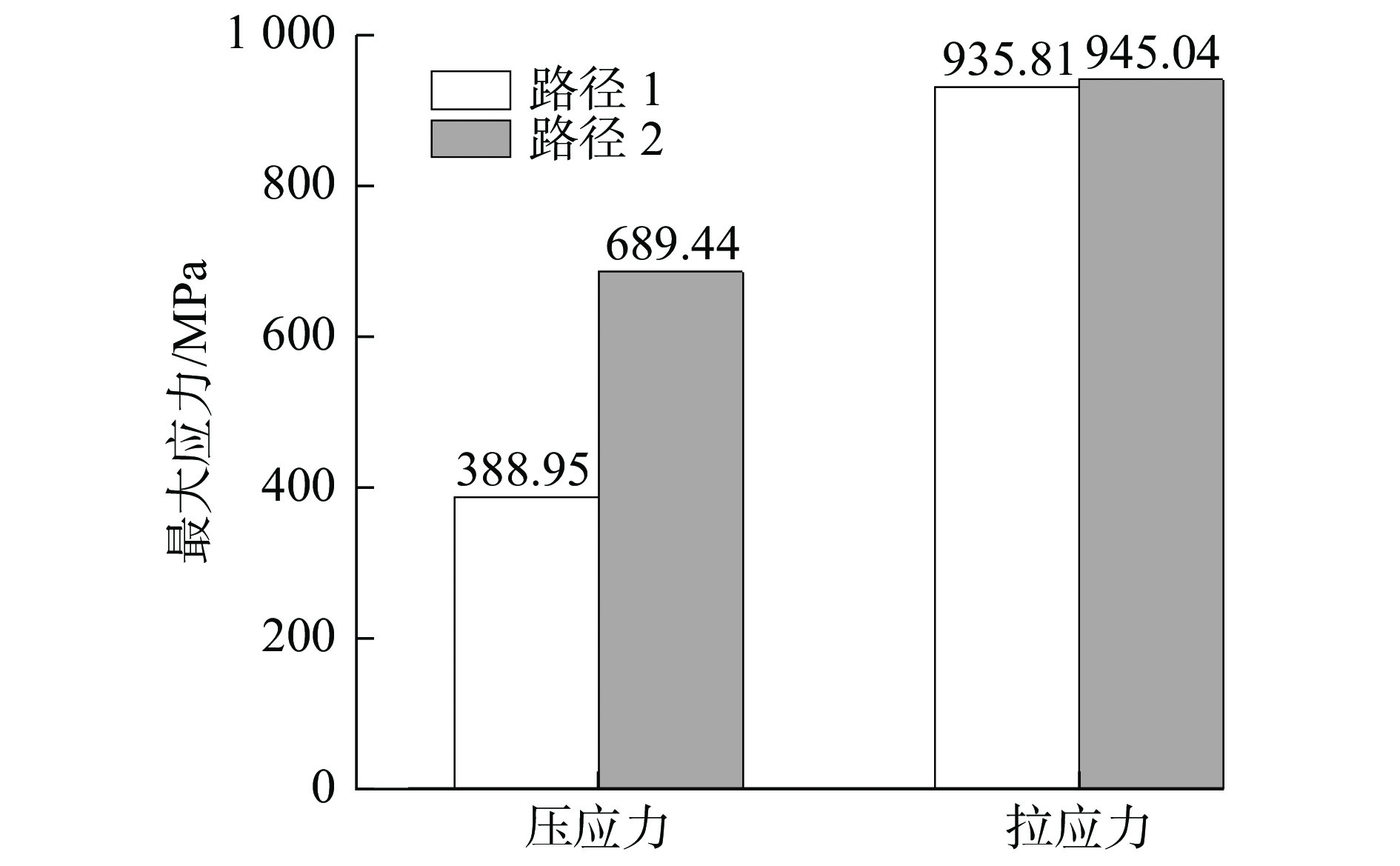
本文利用Marc有限元软件对高温合金的多道多层堆焊过程进行了数值模拟,讨论了堆焊厚度和堆焊路径对焊后残余应力的影响。结果表明,堆焊厚度的增加会导致横向残余应力峰值增大,并使堆焊层局部应力的方向改变,从而受到多向应力作用,因此堆焊层在满足使用要求的前提下 ,堆焊厚度不易过大。同时,由于受到前后焊缝温度的影响,堆焊层间存在应力释放的现象。另外,对比了“逐道堆焊”和“逐层堆焊”过程中焊后残余应力分布情况。“逐层堆焊”相比于“逐道堆焊”所产生的残余应力分布更加均匀,且残余应力峰值更小。
本文利用Marc有限元软件对高温合金的多道多层堆焊过程进行了数值模拟,讨论了堆焊厚度和堆焊路径对焊后残余应力的影响。结果表明,堆焊厚度的增加会导致横向残余应力峰值增大,并使堆焊层局部应力的方向改变,从而受到多向应力作用,因此堆焊层在满足使用要求的前提下 ,堆焊厚度不易过大。同时,由于受到前后焊缝温度的影响,堆焊层间存在应力释放的现象。另外,对比了“逐道堆焊”和“逐层堆焊”过程中焊后残余应力分布情况。“逐层堆焊”相比于“逐道堆焊”所产生的残余应力分布更加均匀,且残余应力峰值更小。







2023, 42(3): 415-425.
doi: 10.13433/j.cnki.1003-8728.20200567
摘要:
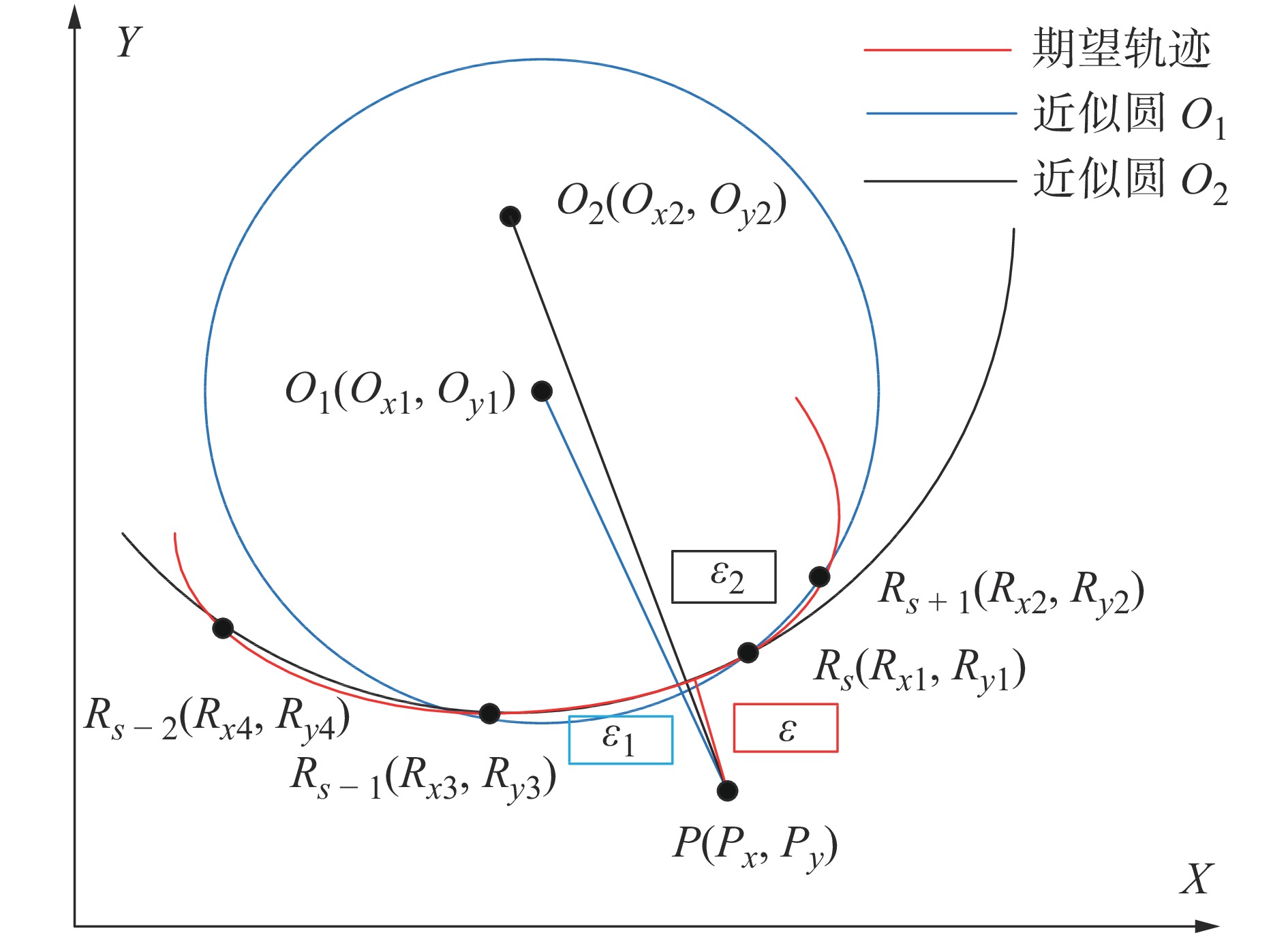
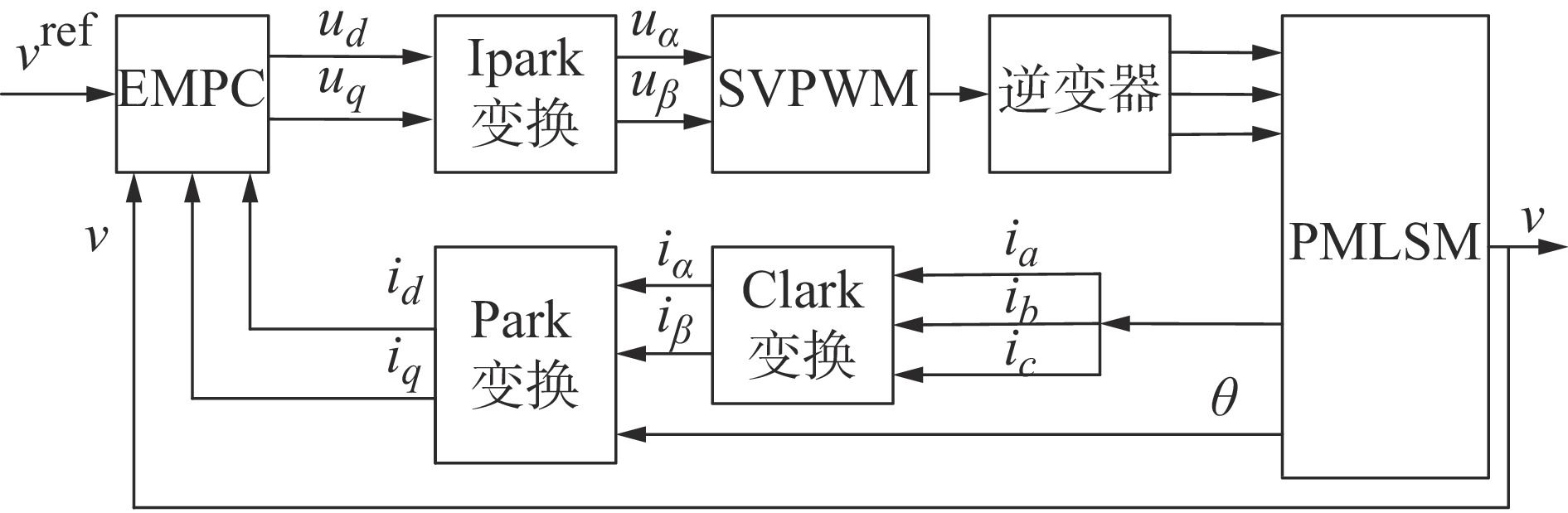
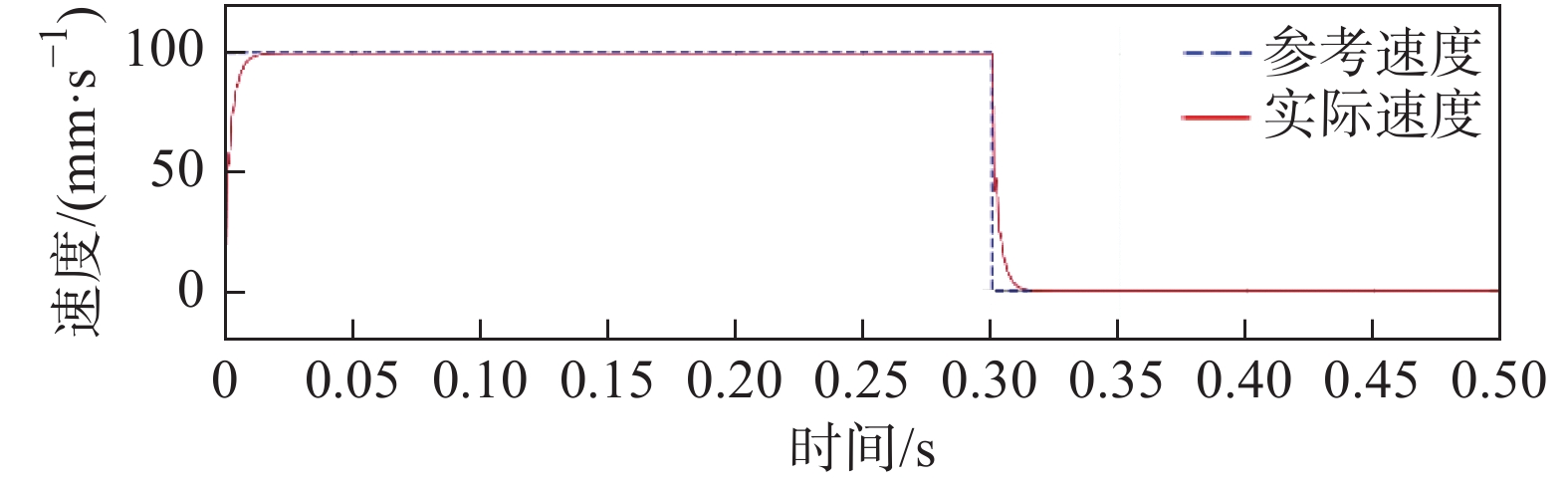
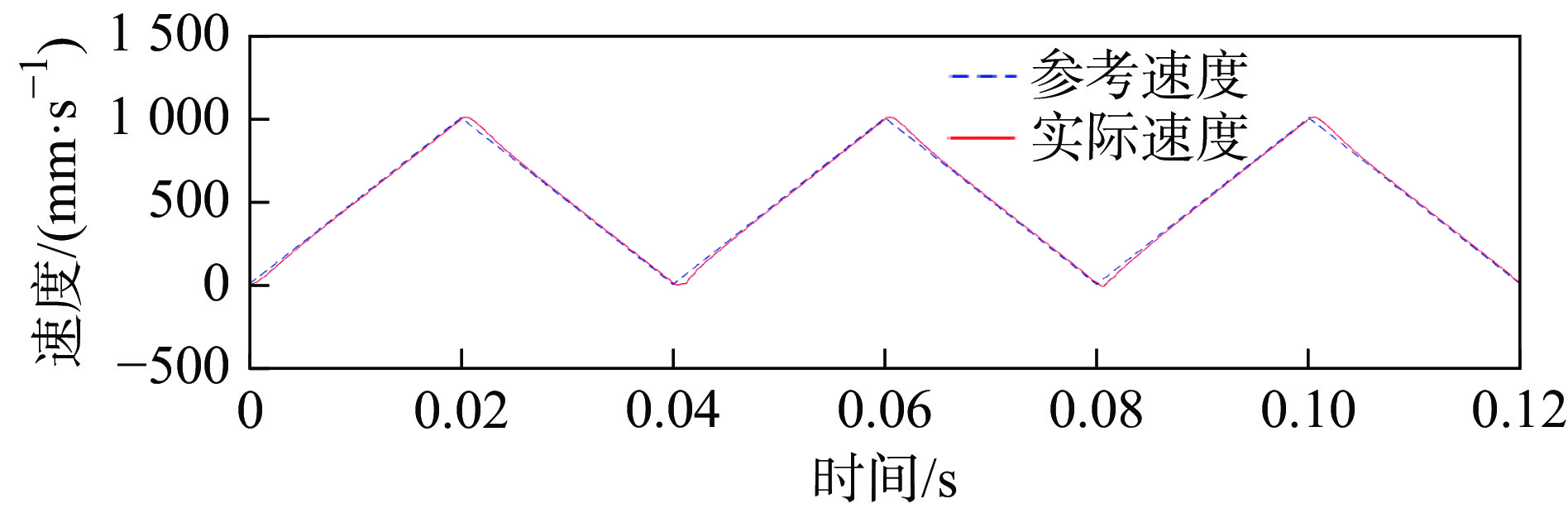
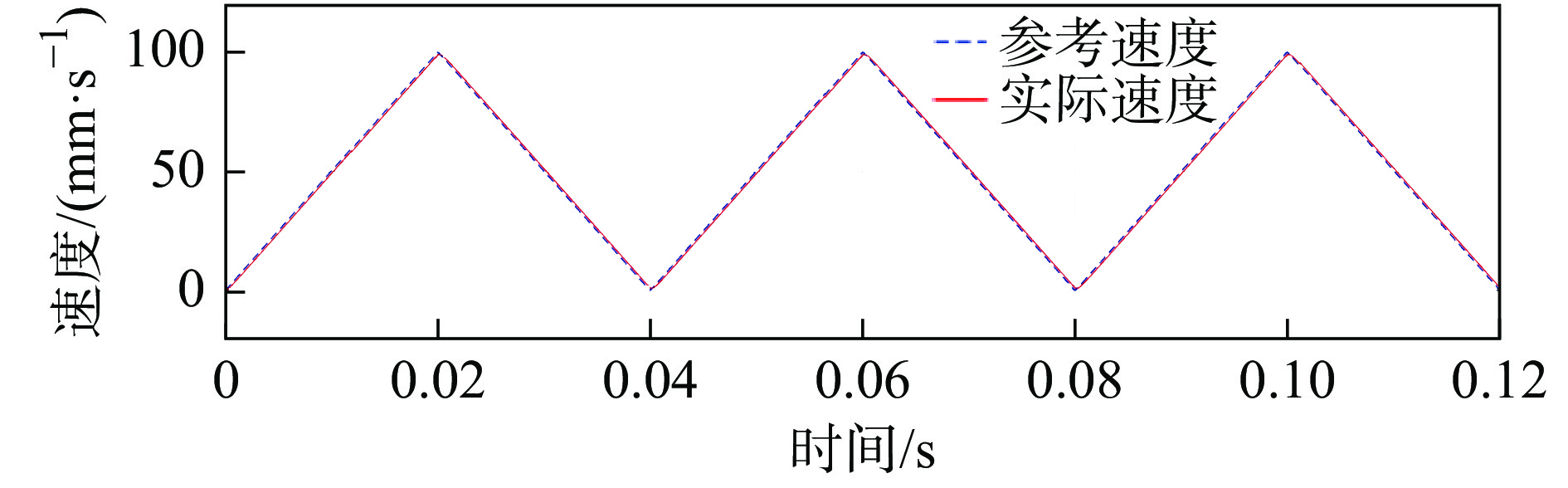
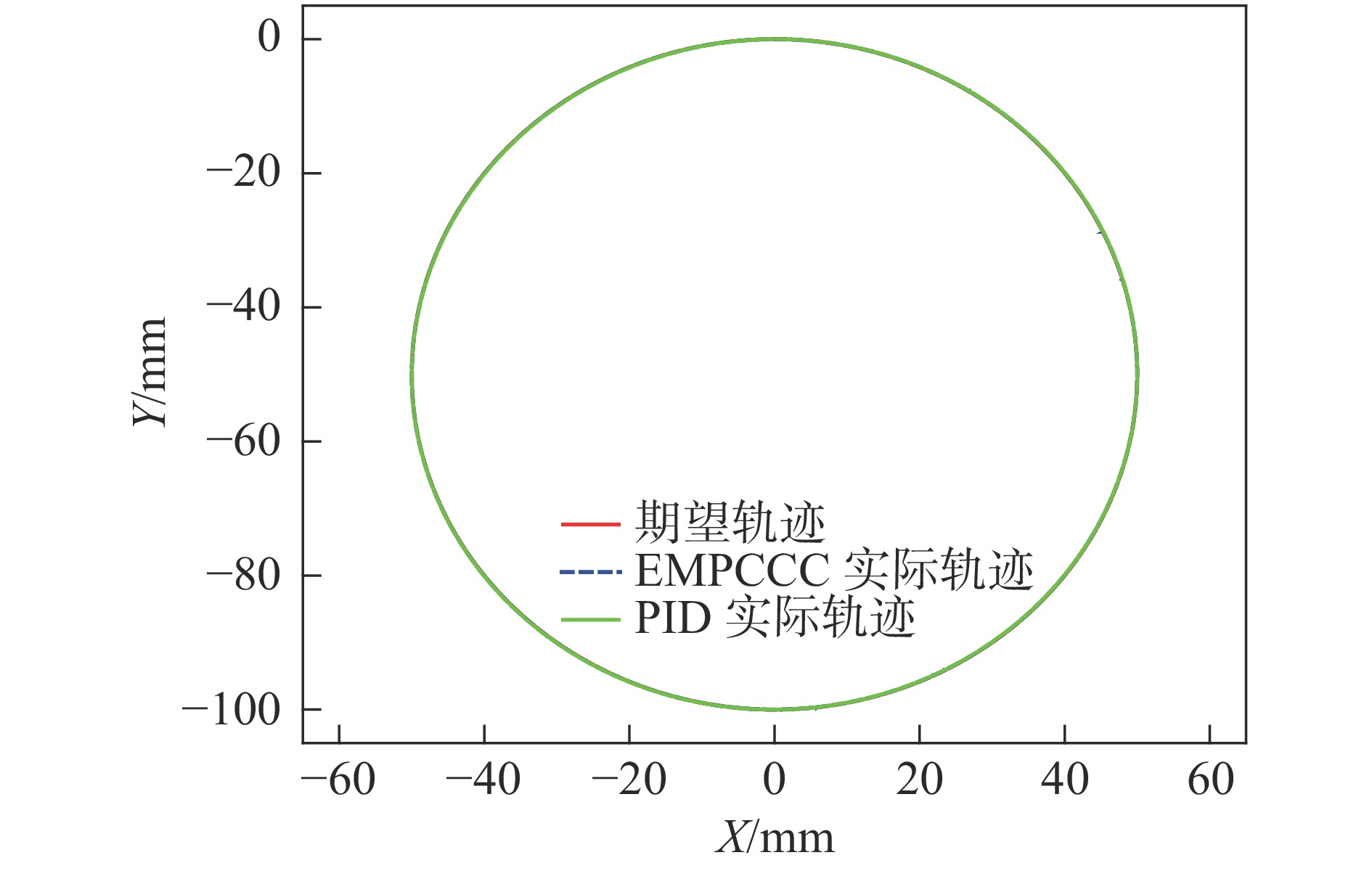
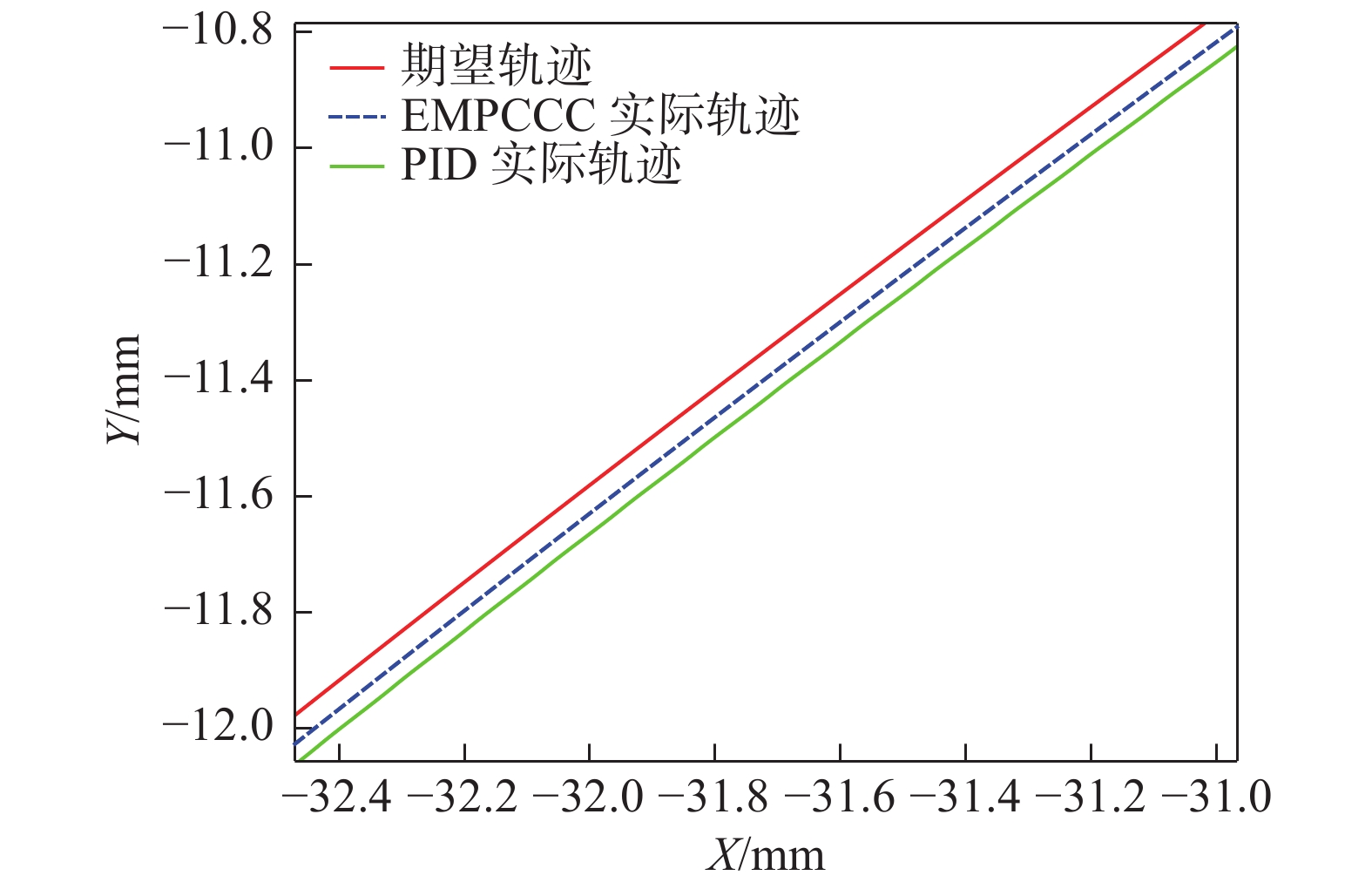
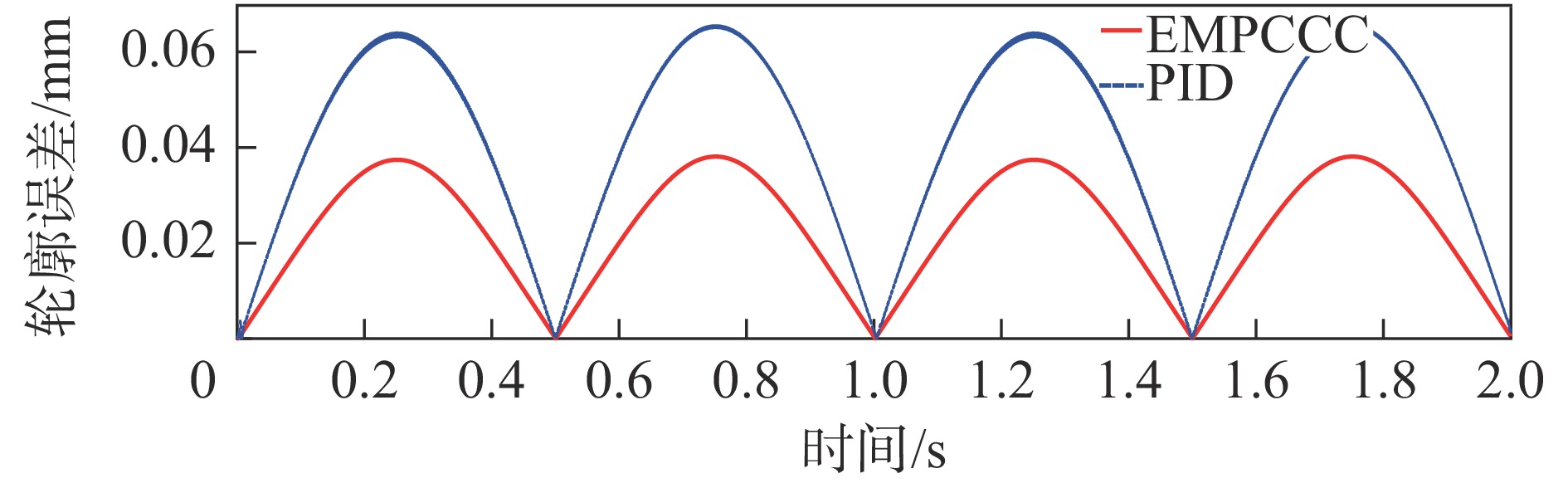
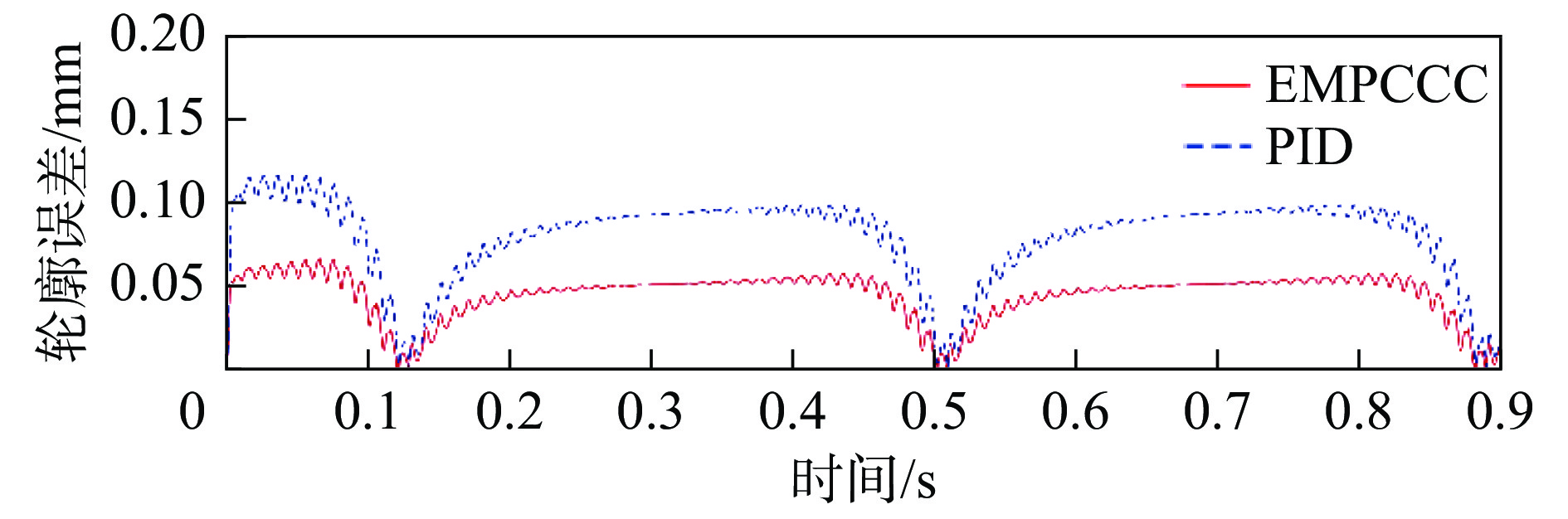
为提高永磁同步直线电机驱动的进给系统轮廓轨迹跟踪精度和系统的动态性能,提出了一种显式模型预测交叉耦合控制方法(Explicit model predictive cross-coupled control, EMPCCC)。该方法结合显式预测控制原理与交叉耦合控制思想,对单轴电流和速度信号进行多步预测,将轮廓误差作为反馈量来修正预测控制的给定轨迹,达到轮廓误差预测控制的目的。基于MATLAB/Simulink搭建仿真模型,结果表明,所提EMPCCC方法能快速实现不同转速波形的无超调跟踪控制,且可以实时估计并补偿轮廓误差,提升不同轨迹的轮廓精度。
为提高永磁同步直线电机驱动的进给系统轮廓轨迹跟踪精度和系统的动态性能,提出了一种显式模型预测交叉耦合控制方法(Explicit model predictive cross-coupled control, EMPCCC)。该方法结合显式预测控制原理与交叉耦合控制思想,对单轴电流和速度信号进行多步预测,将轮廓误差作为反馈量来修正预测控制的给定轨迹,达到轮廓误差预测控制的目的。基于MATLAB/Simulink搭建仿真模型,结果表明,所提EMPCCC方法能快速实现不同转速波形的无超调跟踪控制,且可以实时估计并补偿轮廓误差,提升不同轨迹的轮廓精度。







2023, 42(3): 426-431.
doi: 10.13433/j.cnki.1003-8728.20200564
摘要:
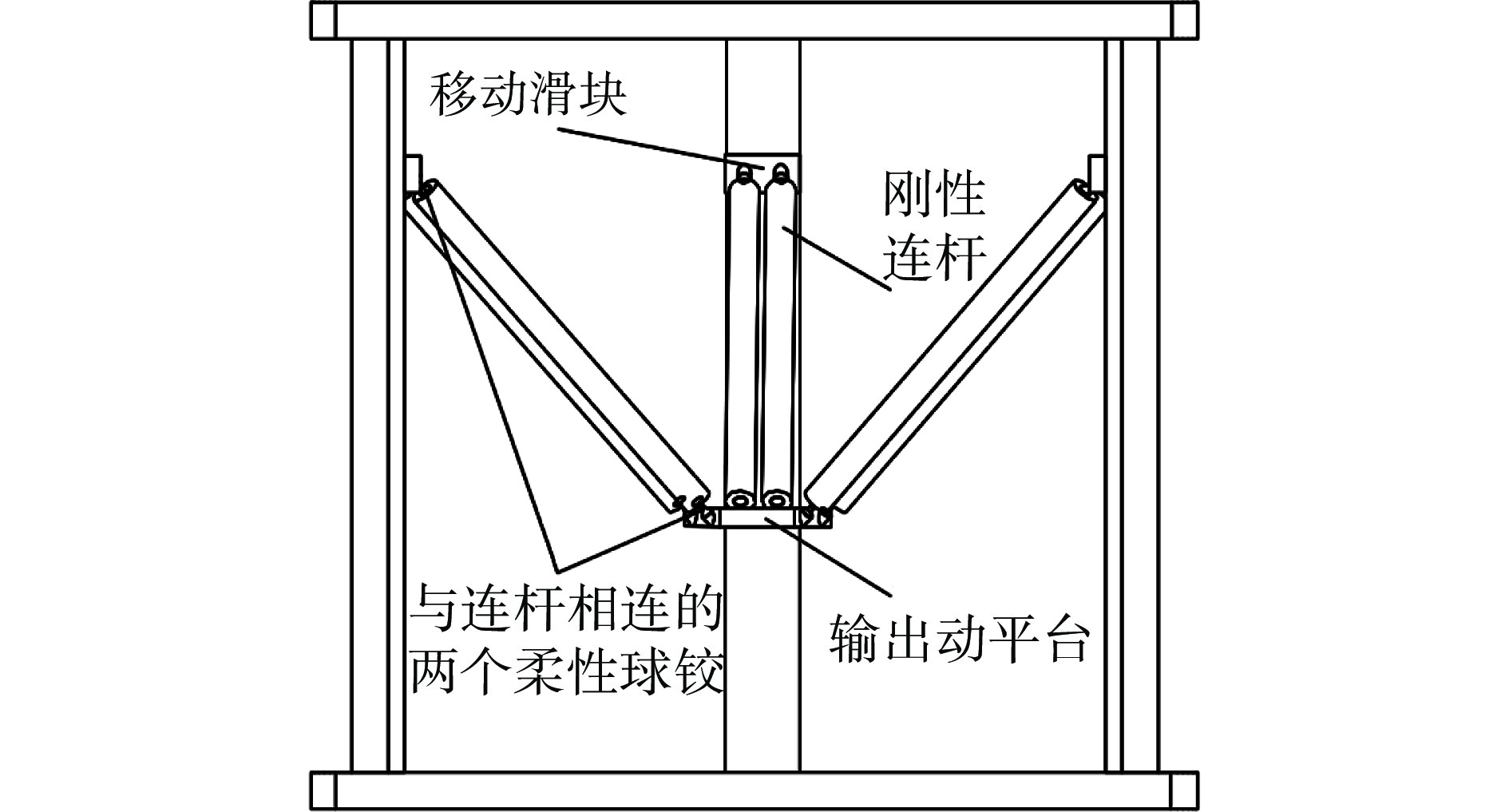
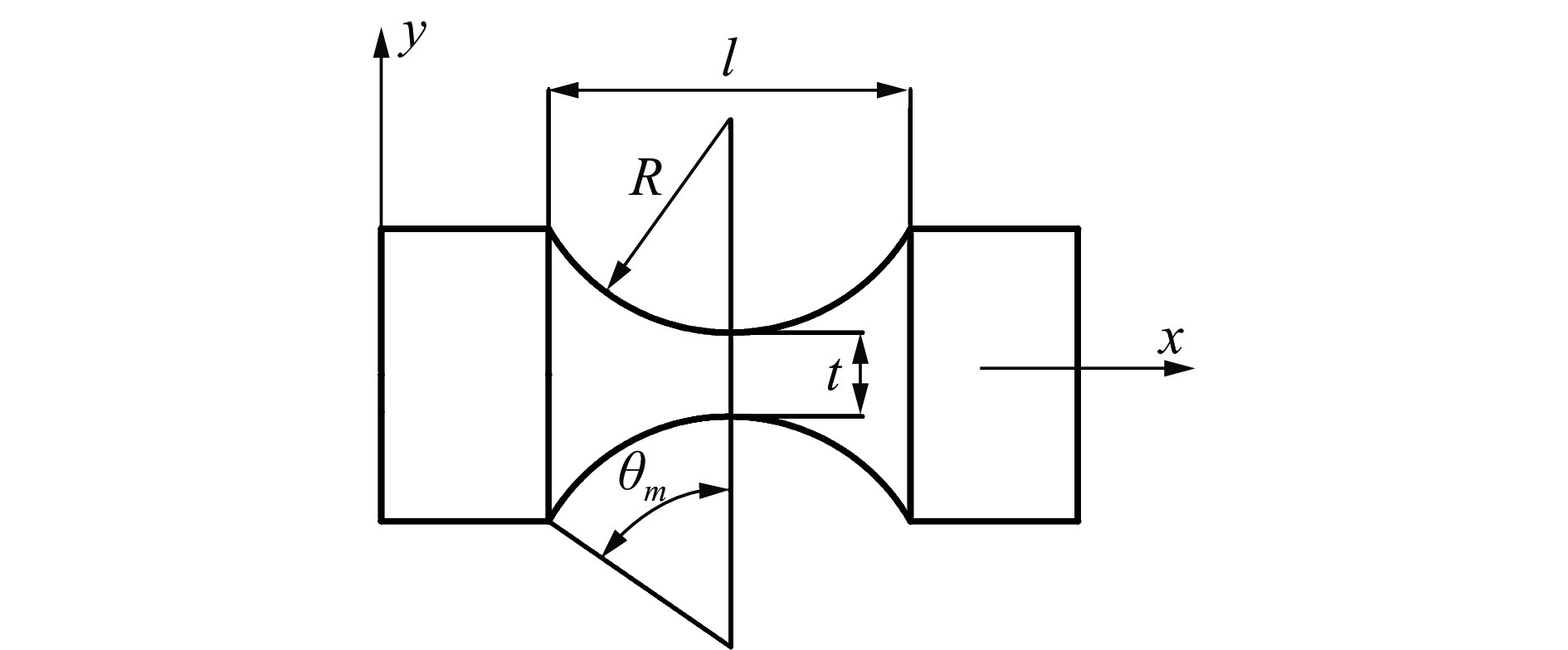
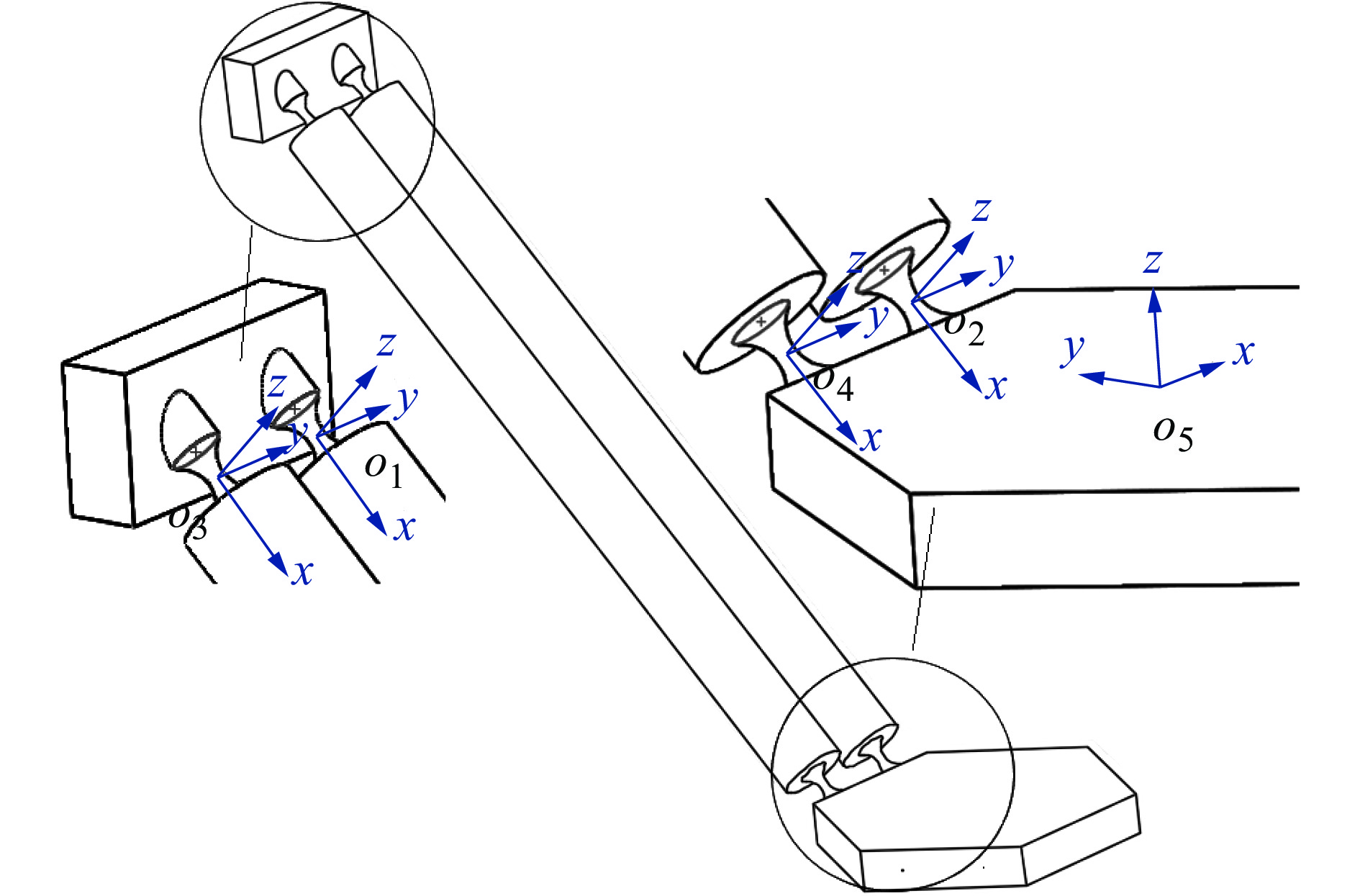
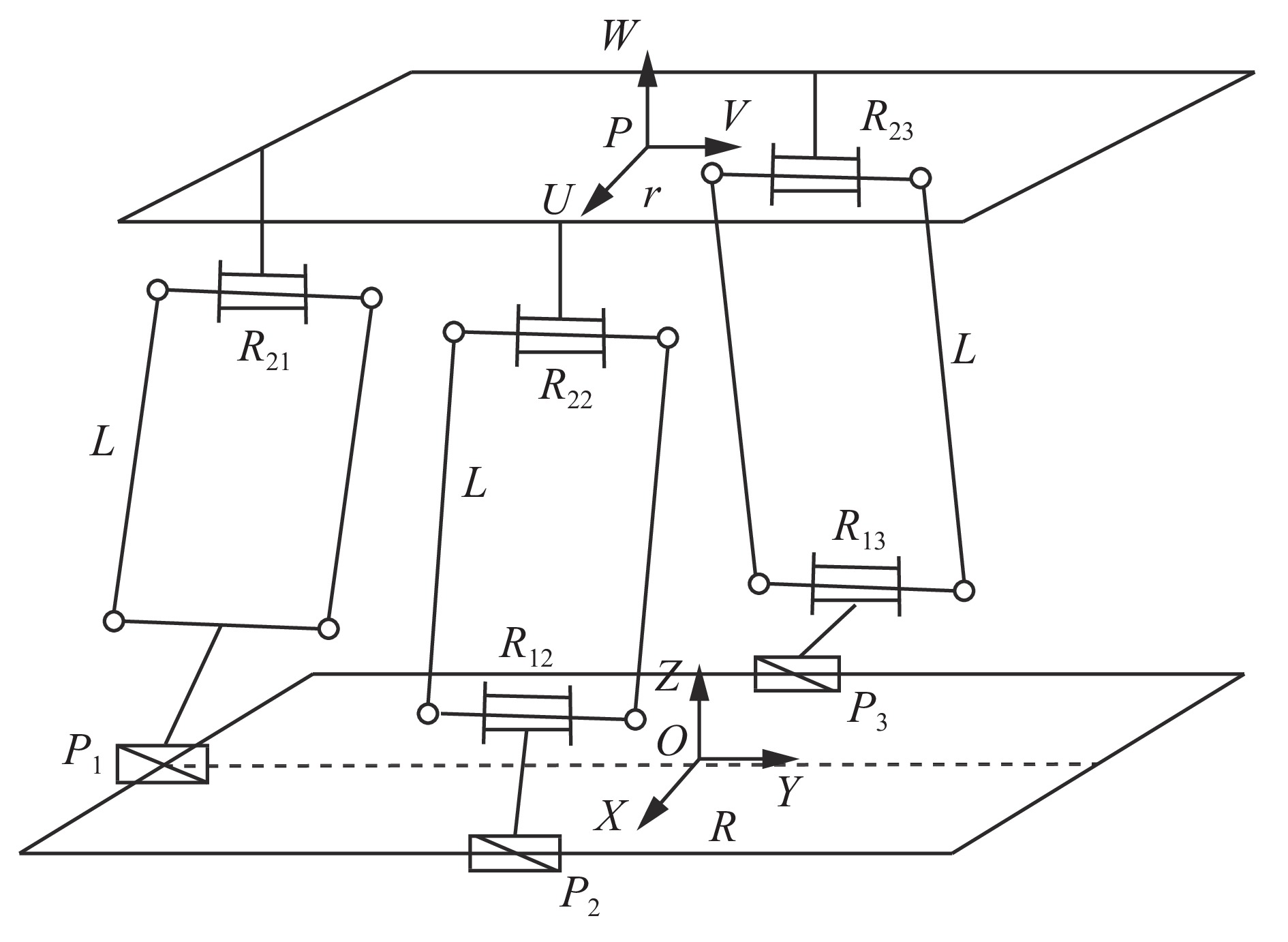
柔度矩阵建模是进行全柔性机构分析的基础。针对3-PSS型柔性并联微操作机器人,首先基于坐标变换法计算机构单条支链柔度矩阵,并基于此建立机器人整体柔度矩阵模型。然后进行数值算例计算和Ansys有限元仿真分析,并将理论计算结果与有限元分析结果进行对比,验证了柔度矩阵建模的正确性。最后对柔性并联机器人进行了柔度性能分析,并得出了机构的结构参数对柔度的影响规律,分析结果对3-PSS型柔性并联机构的结构优化设计提供了依据。
柔度矩阵建模是进行全柔性机构分析的基础。针对3-PSS型柔性并联微操作机器人,首先基于坐标变换法计算机构单条支链柔度矩阵,并基于此建立机器人整体柔度矩阵模型。然后进行数值算例计算和Ansys有限元仿真分析,并将理论计算结果与有限元分析结果进行对比,验证了柔度矩阵建模的正确性。最后对柔性并联机器人进行了柔度性能分析,并得出了机构的结构参数对柔度的影响规律,分析结果对3-PSS型柔性并联机构的结构优化设计提供了依据。






2023, 42(3): 432-438.
doi: 10.13433/j.cnki.1003-8728.20200648
摘要:
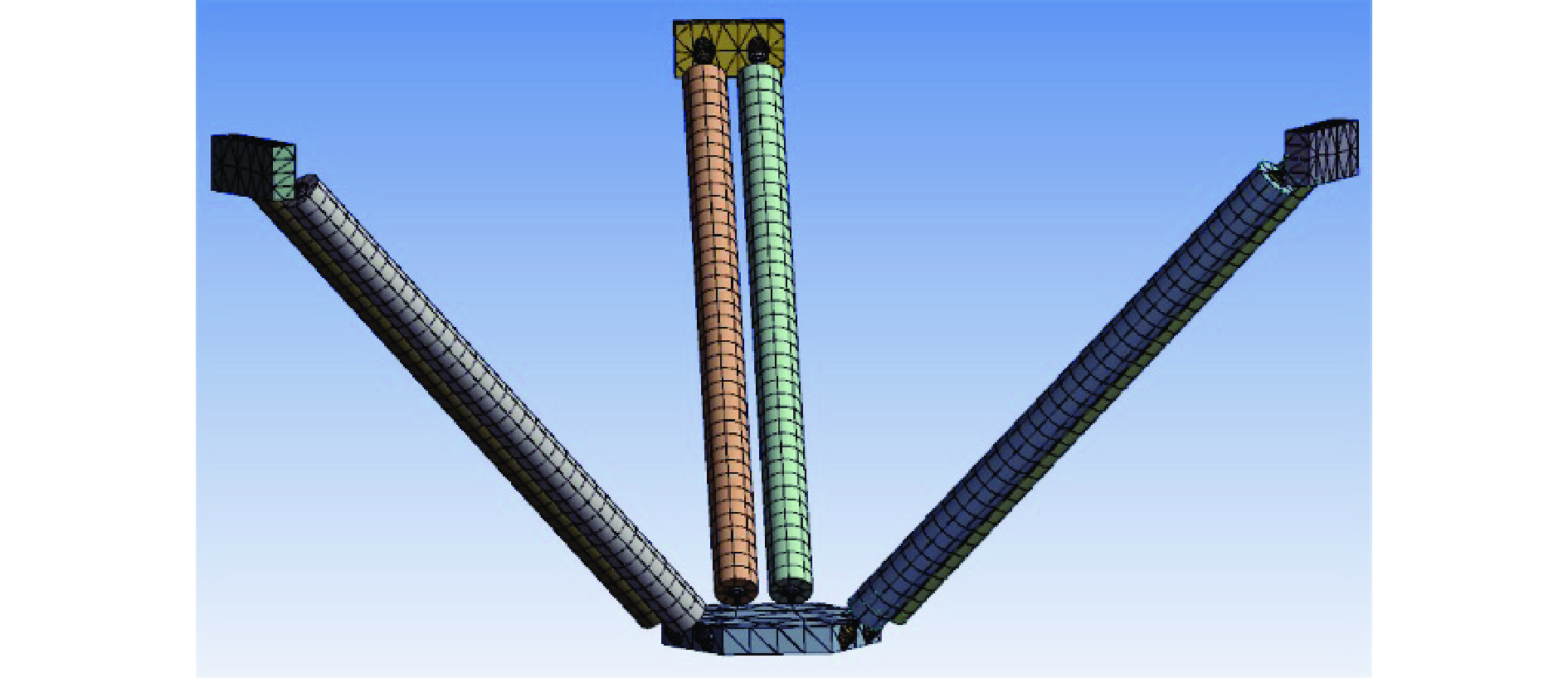
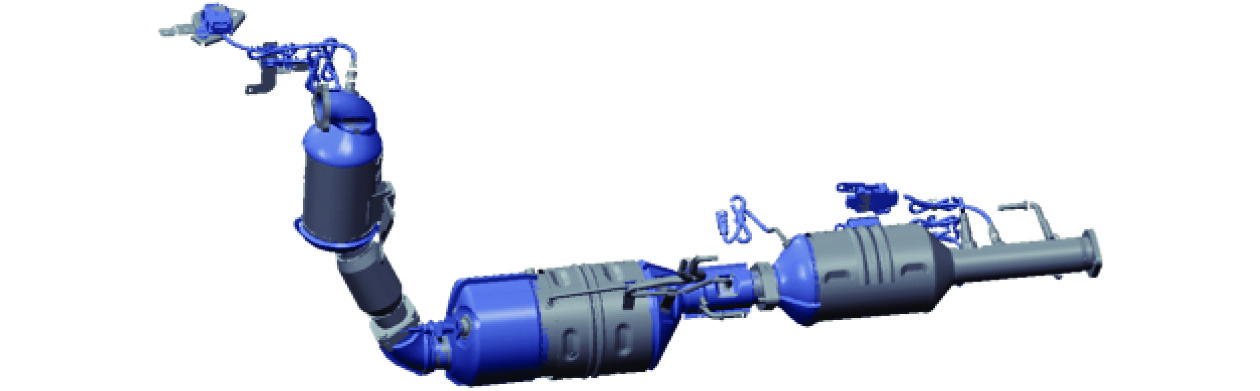
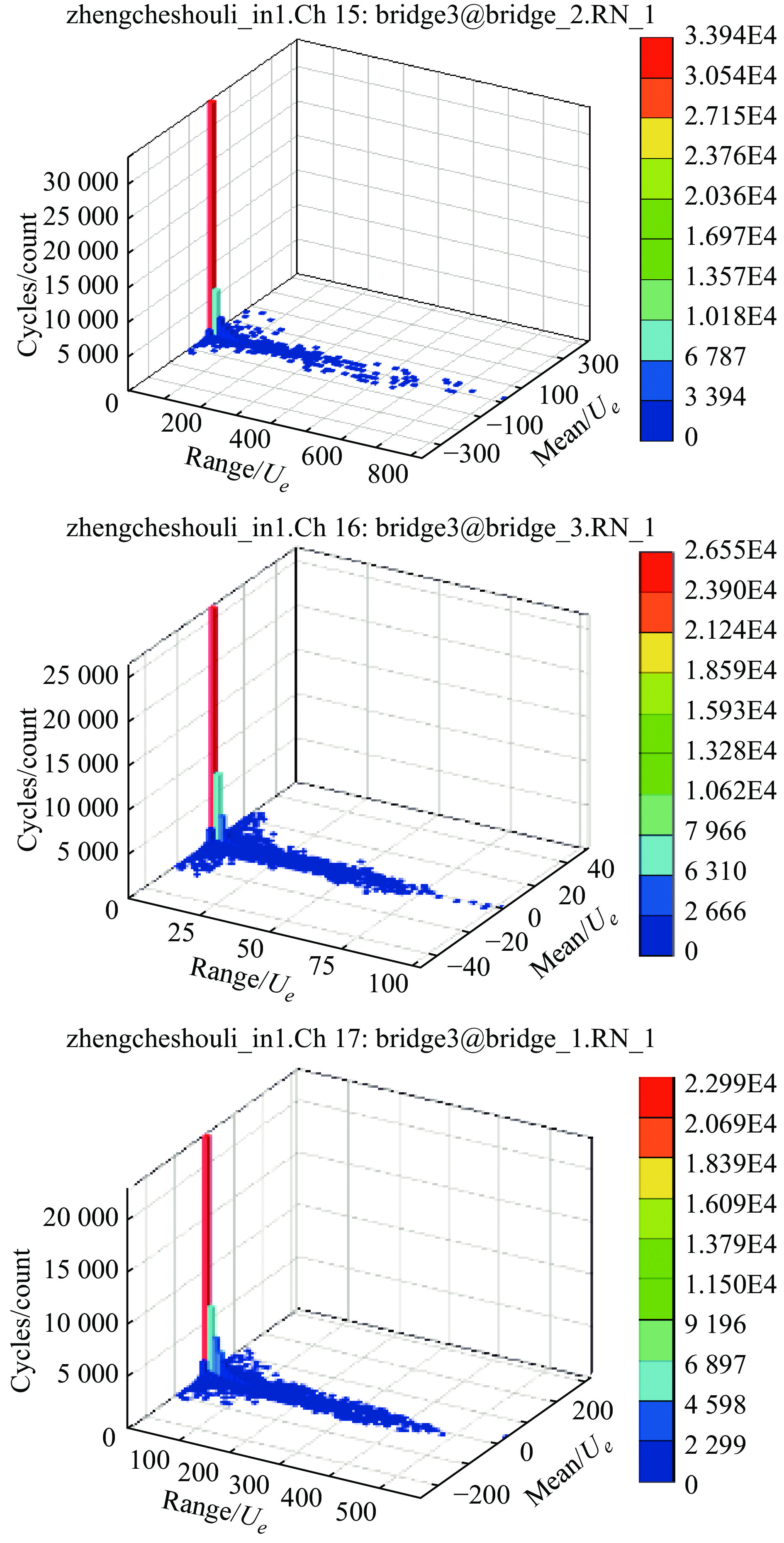
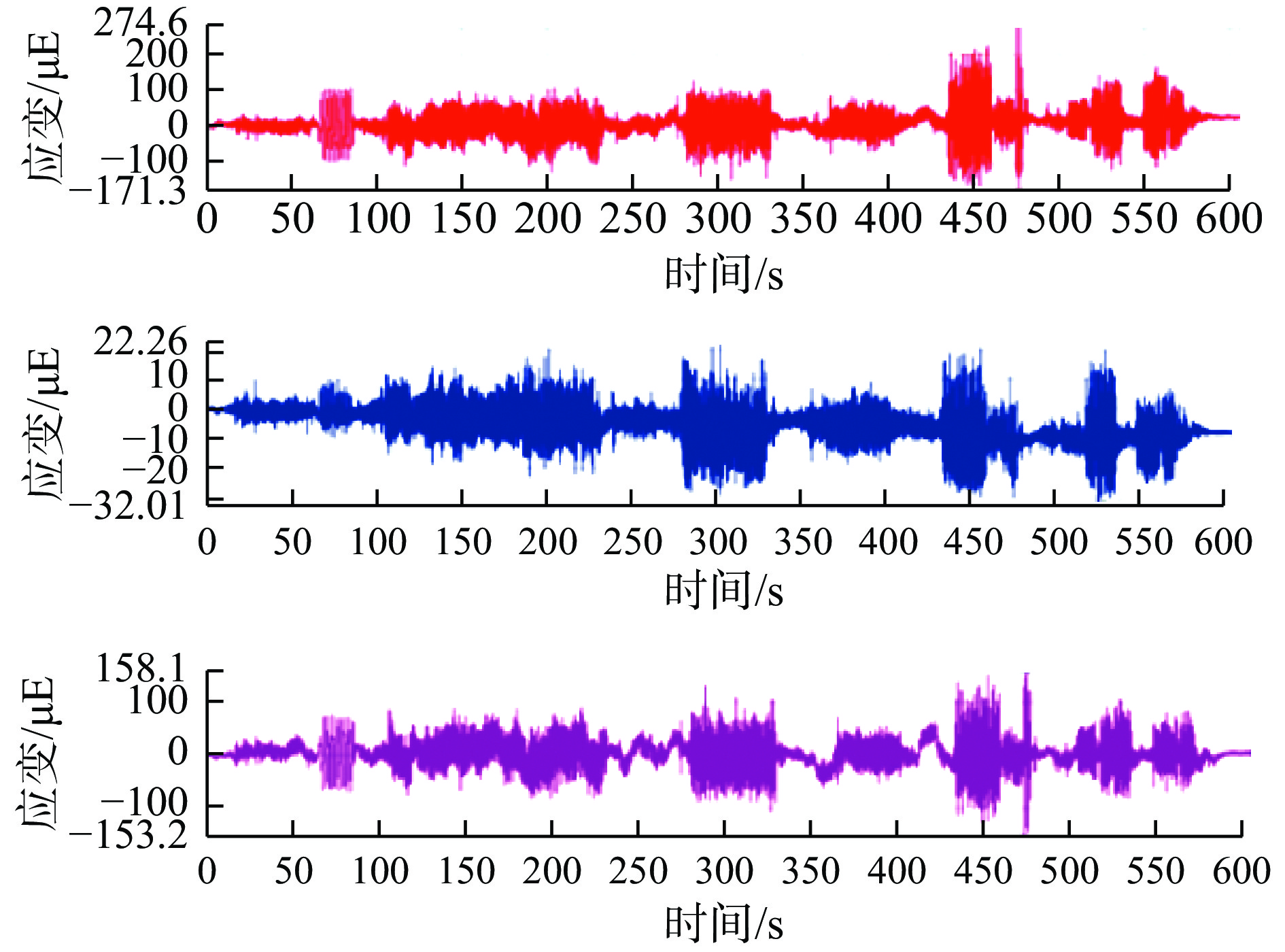
针对以总布置为目标的传统设计方法不能够满足排气系统可靠性要求,提出一种基于改进蚁群算法的排气系统可靠性优化设计方法。通过对概率因子优化、挥发条件动态处理机制以及引入最大-最小蚂蚁系统3个方面对传统蚁群算法进行改进。结合CAE仿真模拟计算、应力谱采集以及二次响应面拟合法构建可靠性寿命预测模型,利用改进蚁群算法进行优化设计求解。结果表明,排气系统所受最大应力由原来的175.11 MPa减小为158.92 MPa,可靠性寿命计算值由5 623.69 h提升至6 165.95 h。该方法有效提升排气系统可靠性寿命。
针对以总布置为目标的传统设计方法不能够满足排气系统可靠性要求,提出一种基于改进蚁群算法的排气系统可靠性优化设计方法。通过对概率因子优化、挥发条件动态处理机制以及引入最大-最小蚂蚁系统3个方面对传统蚁群算法进行改进。结合CAE仿真模拟计算、应力谱采集以及二次响应面拟合法构建可靠性寿命预测模型,利用改进蚁群算法进行优化设计求解。结果表明,排气系统所受最大应力由原来的175.11 MPa减小为158.92 MPa,可靠性寿命计算值由5 623.69 h提升至6 165.95 h。该方法有效提升排气系统可靠性寿命。





2023, 42(3): 439-445.
doi: 10.13433/j.cnki.1003-8728.20200593
摘要:
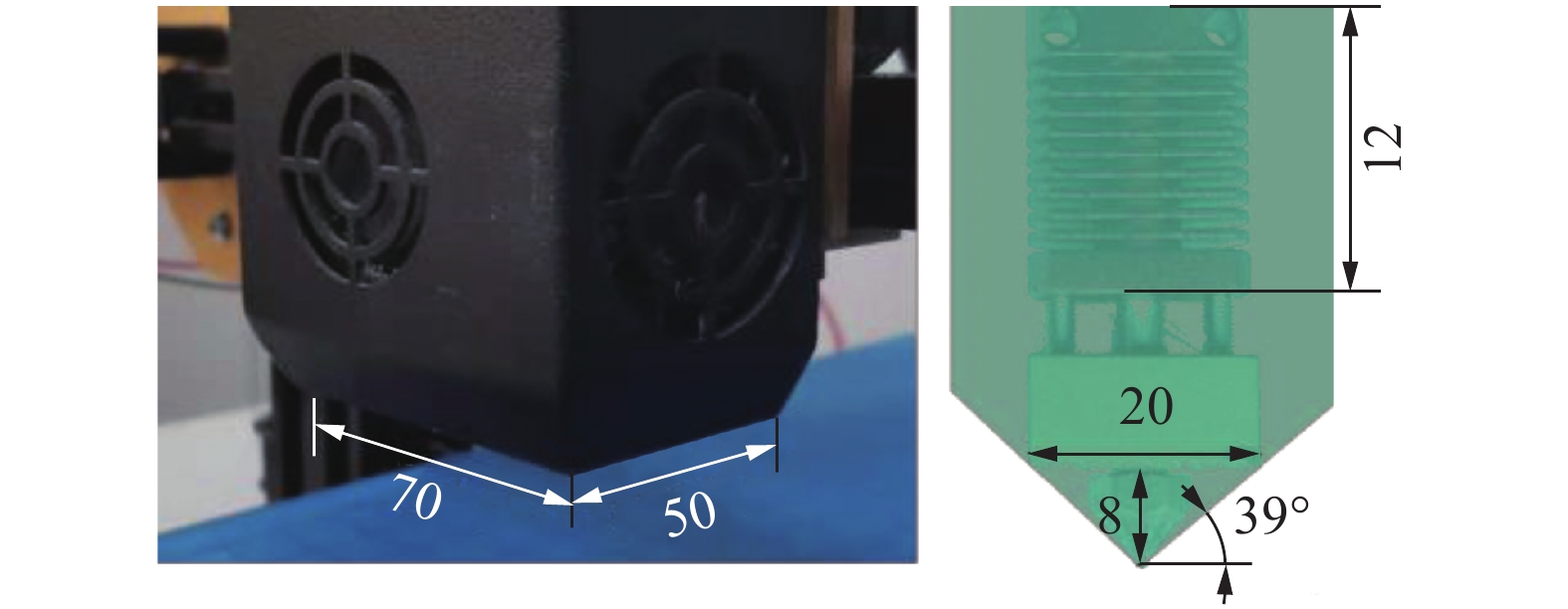
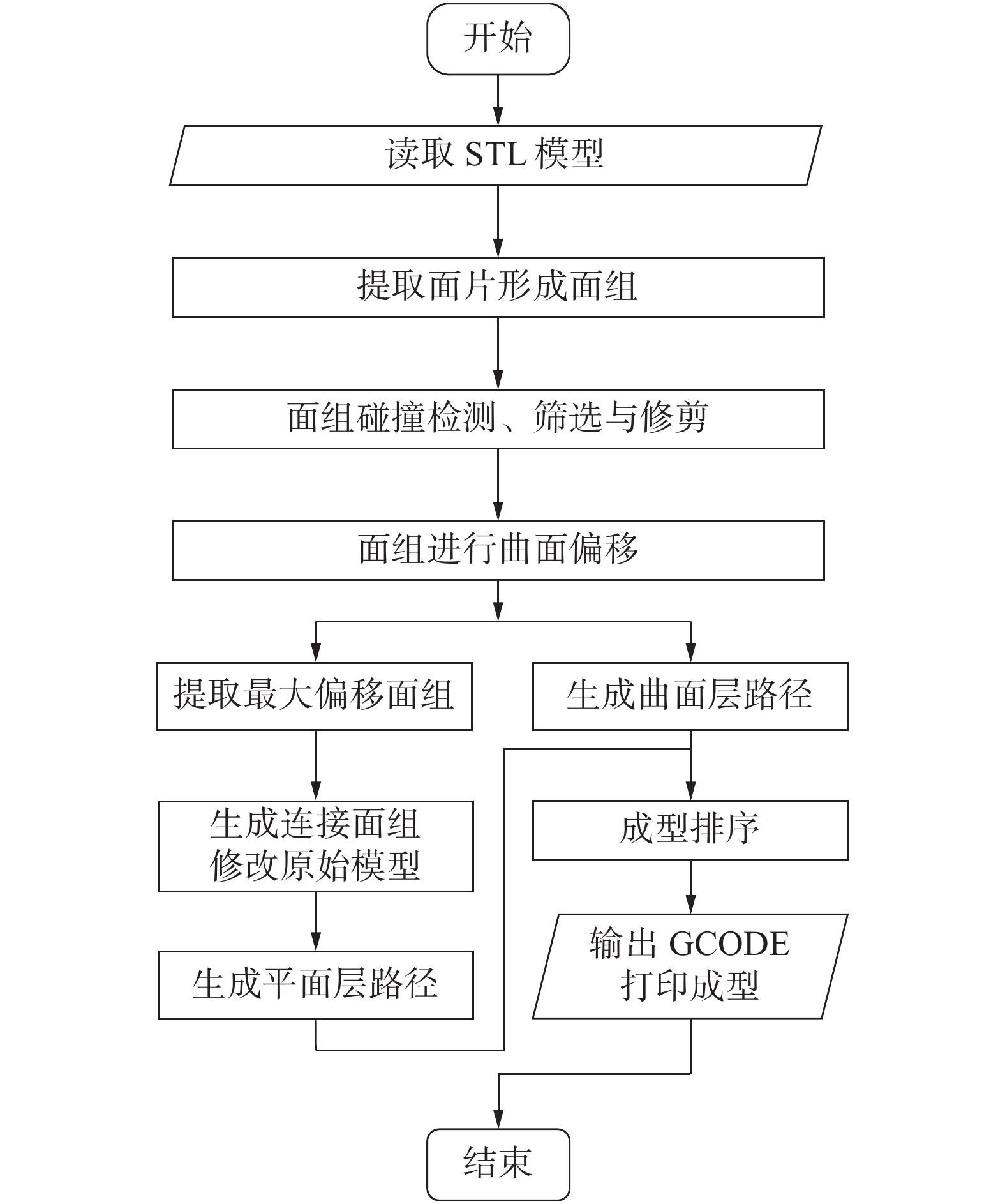
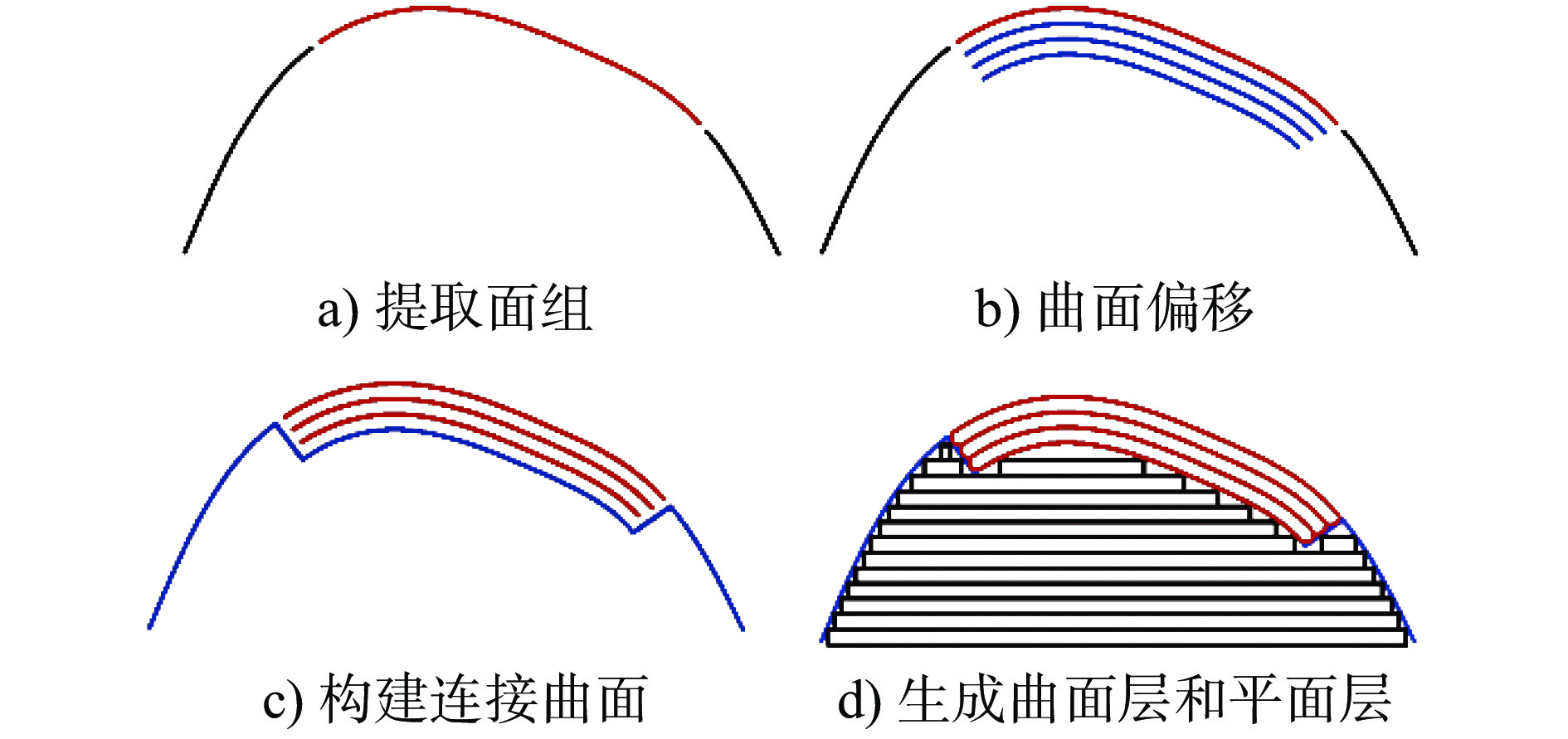
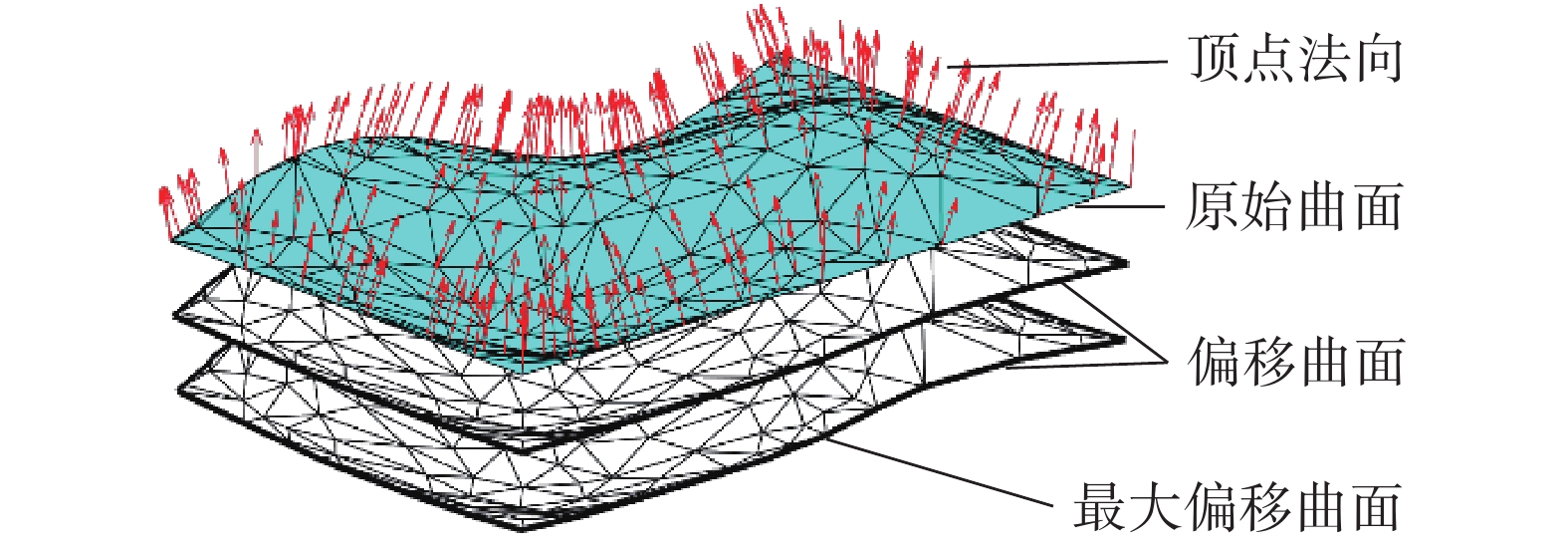
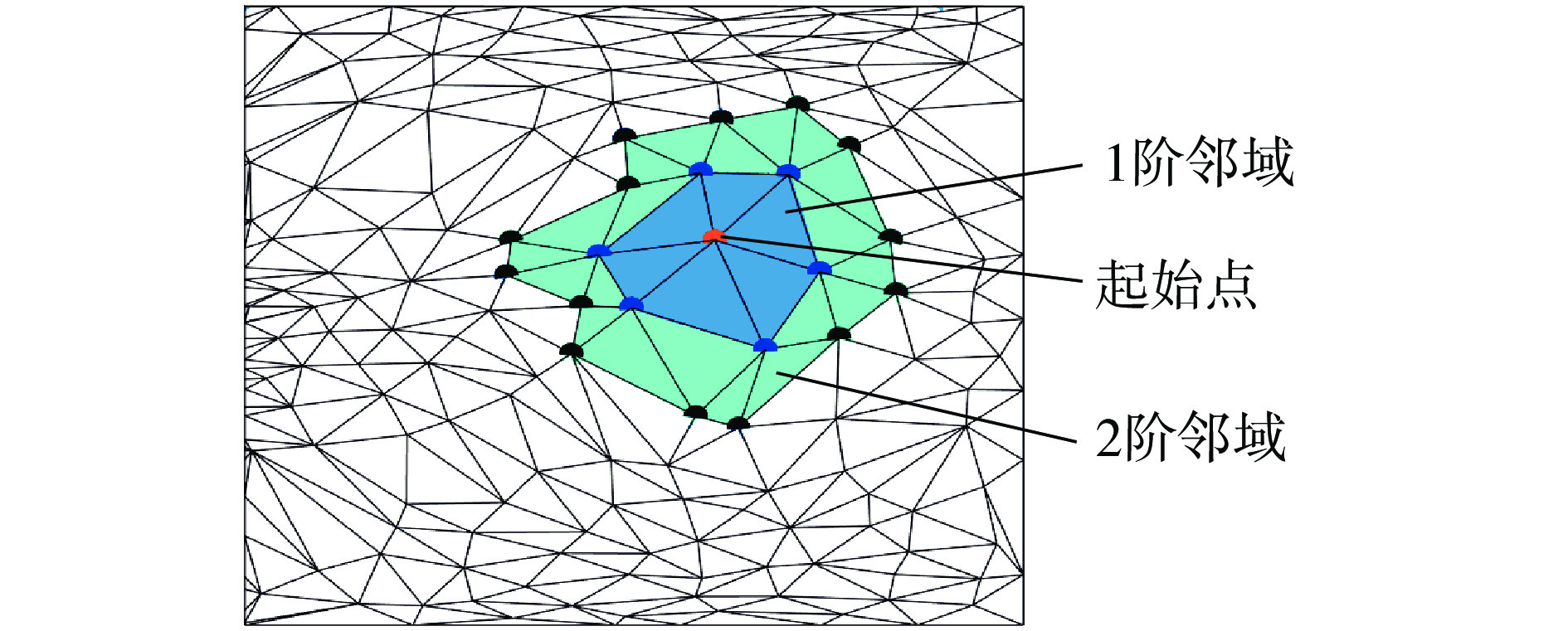
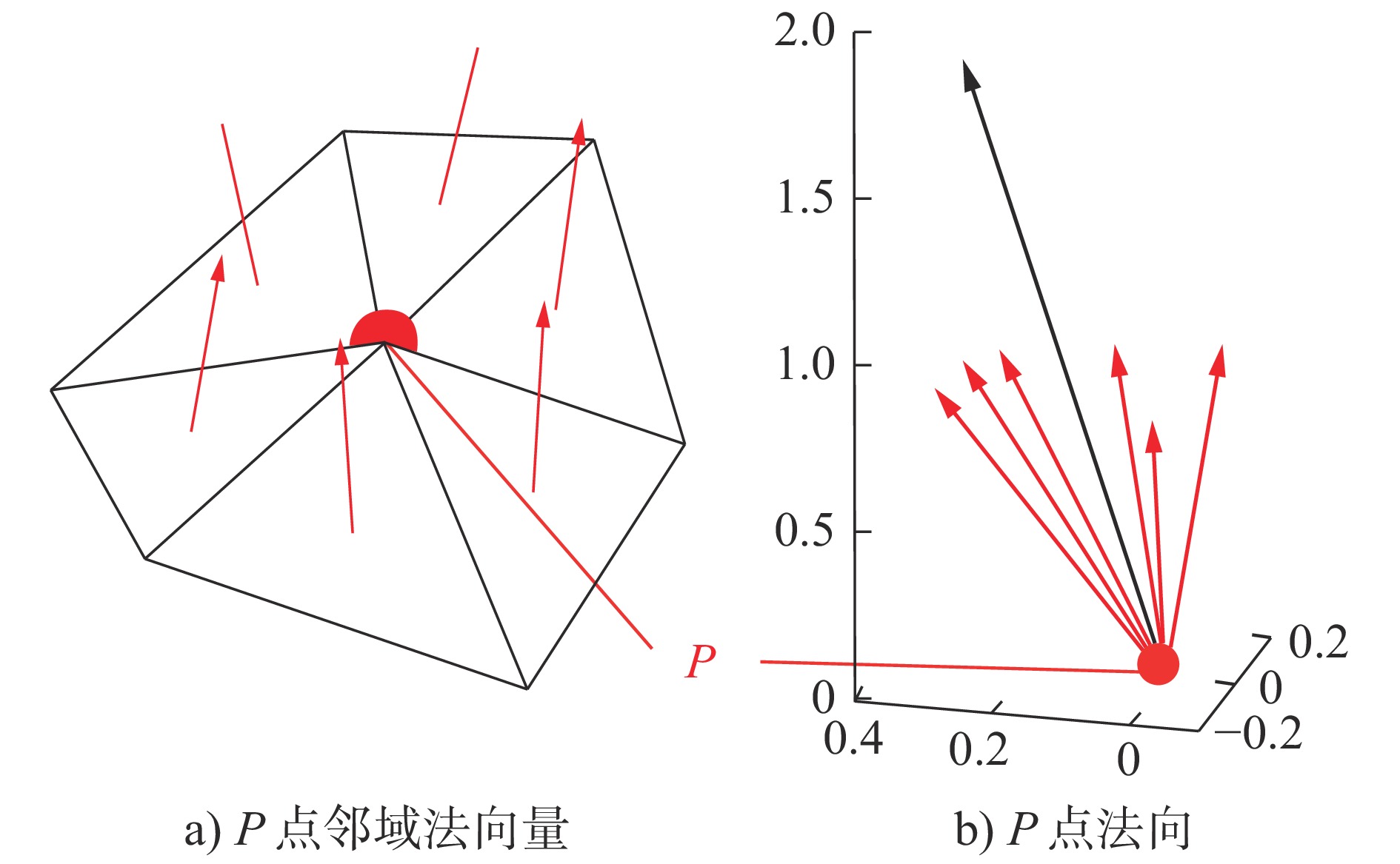
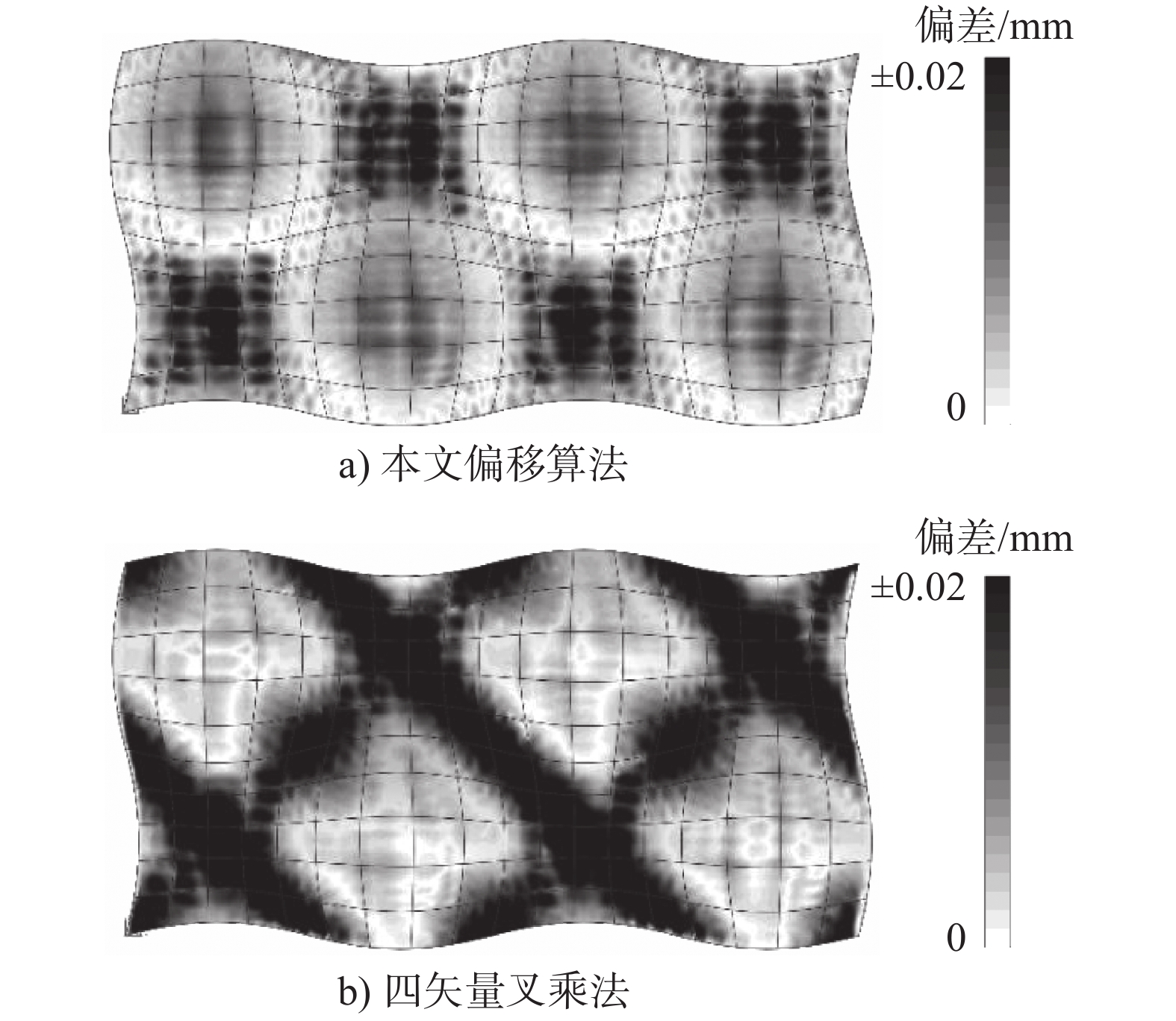
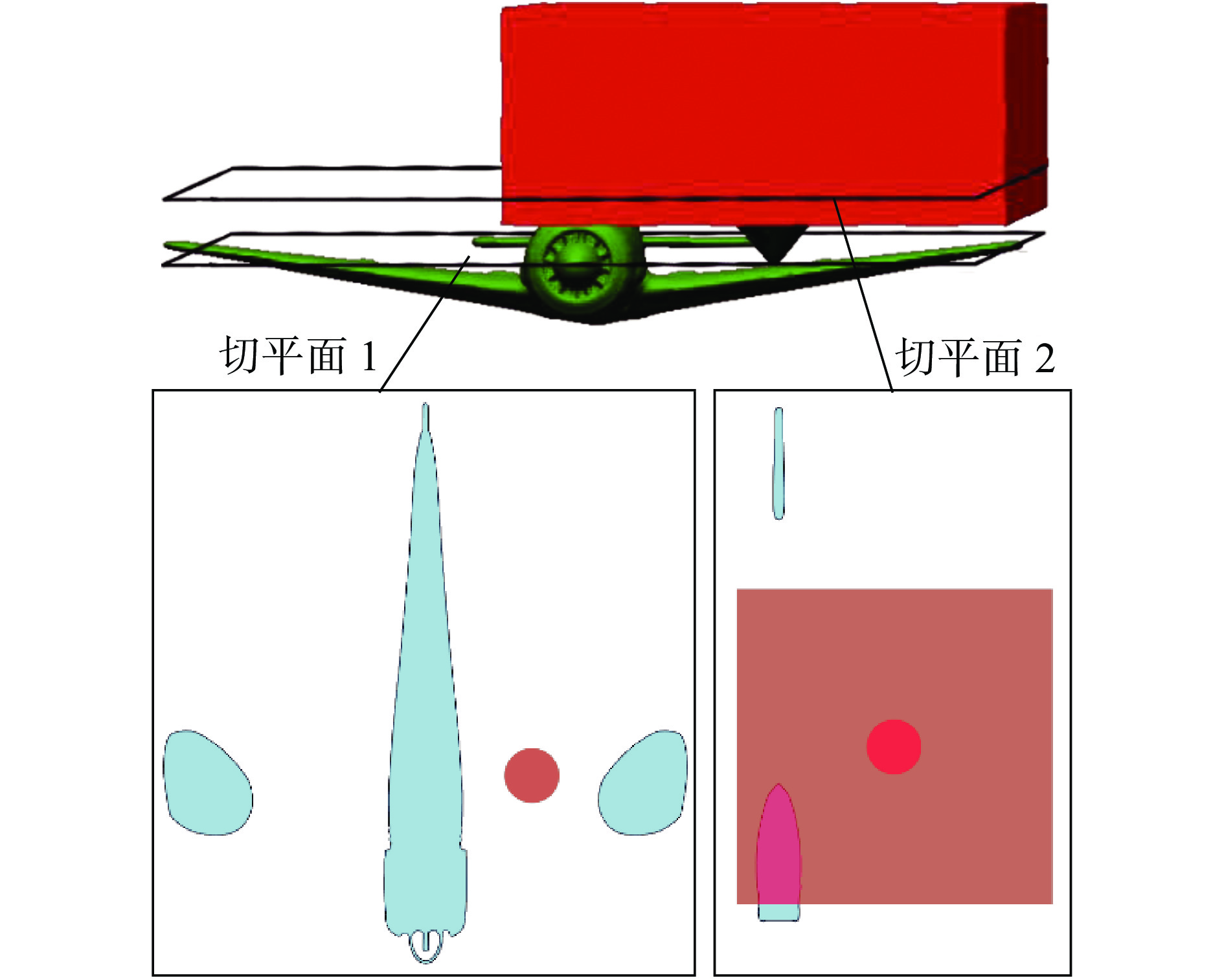
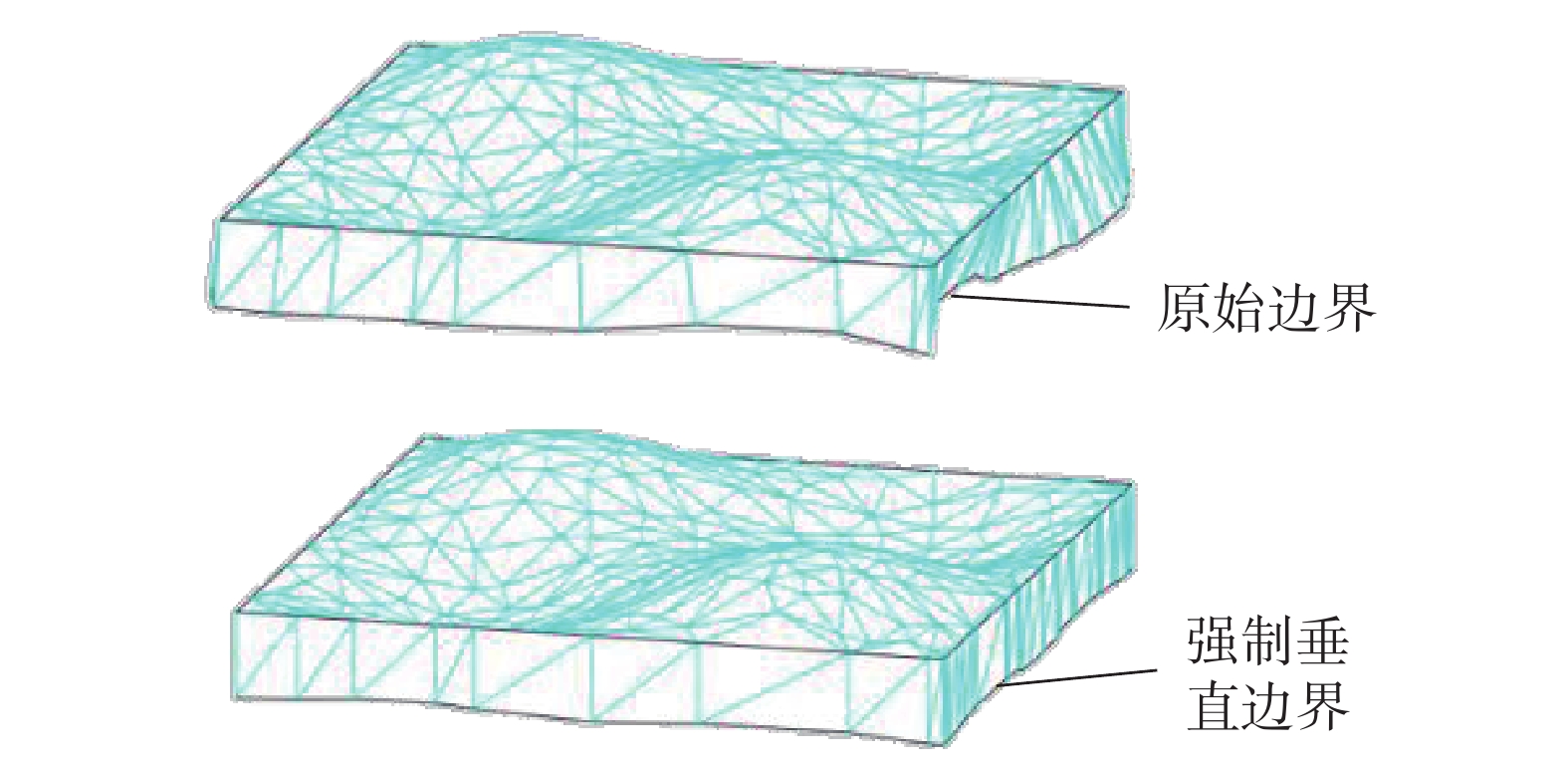
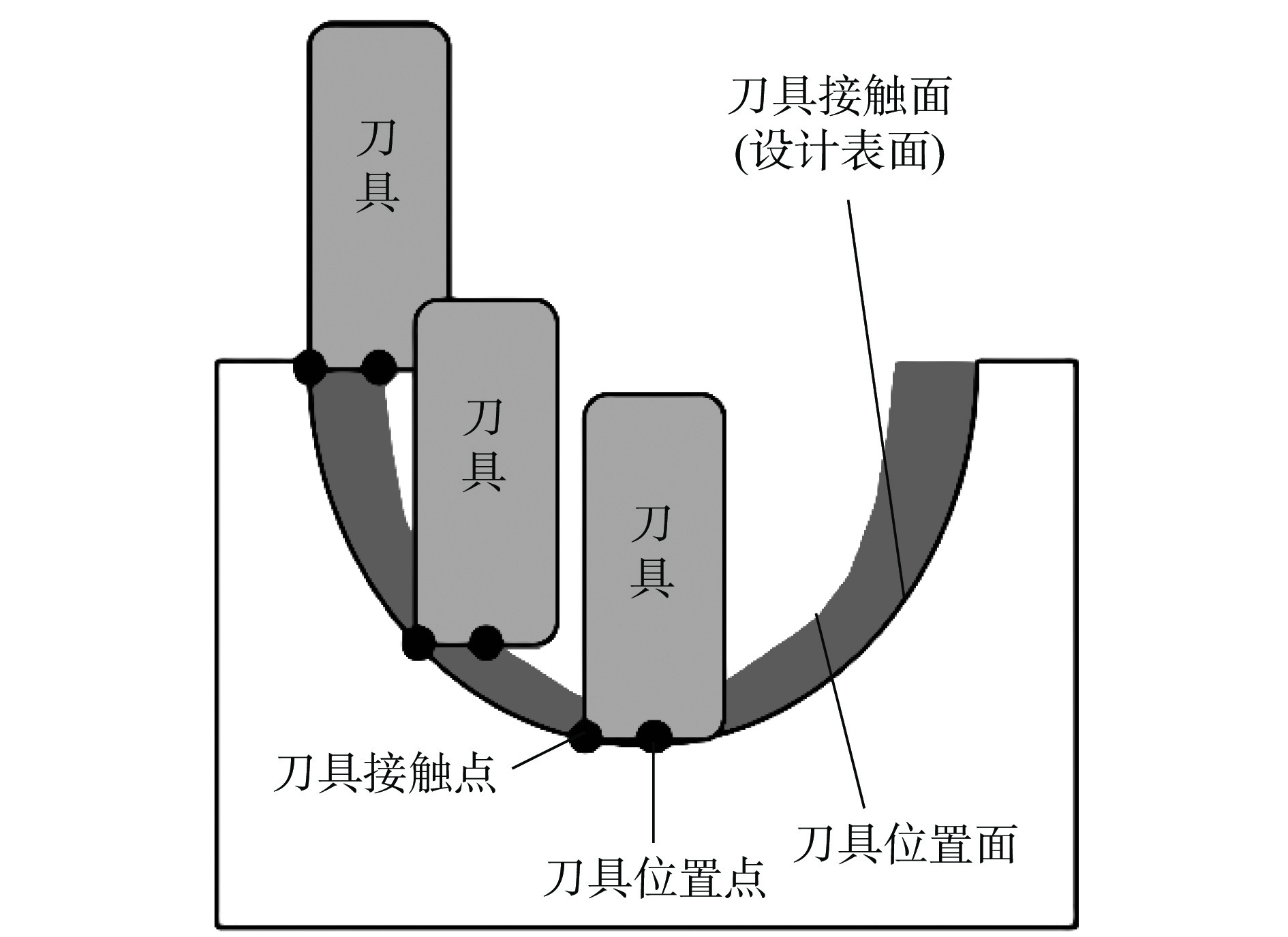
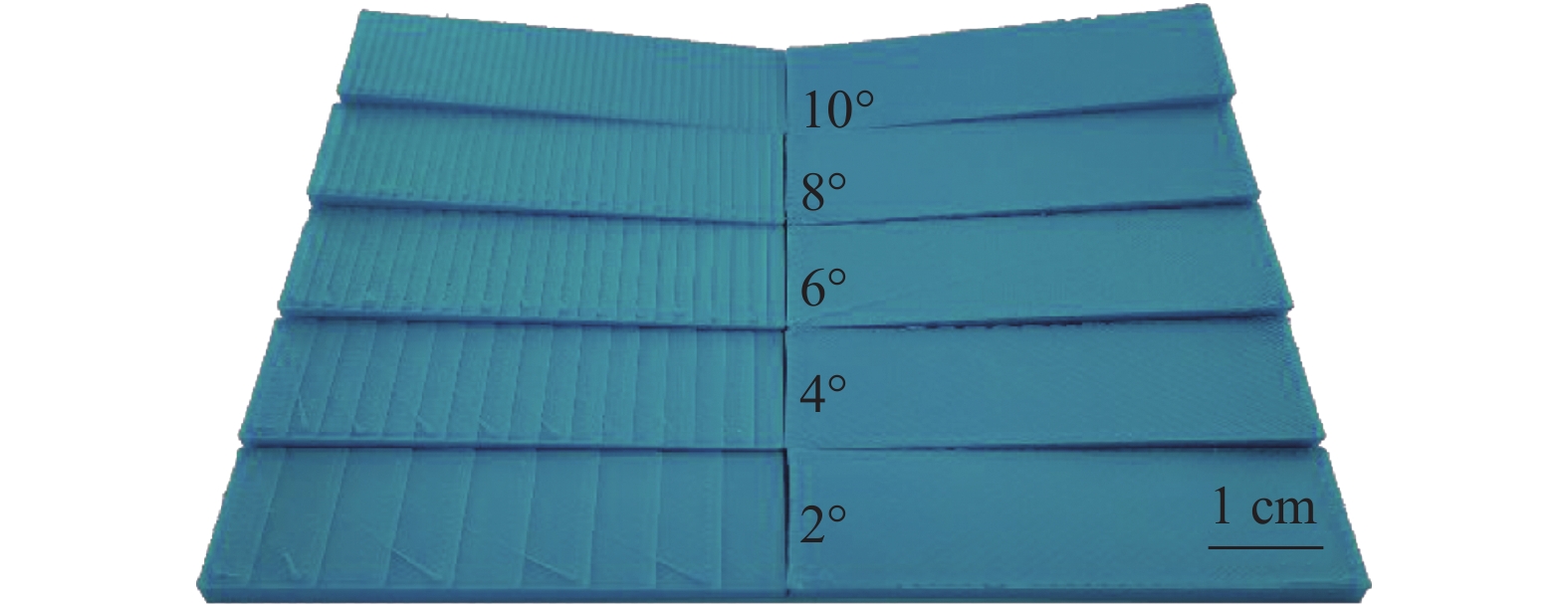
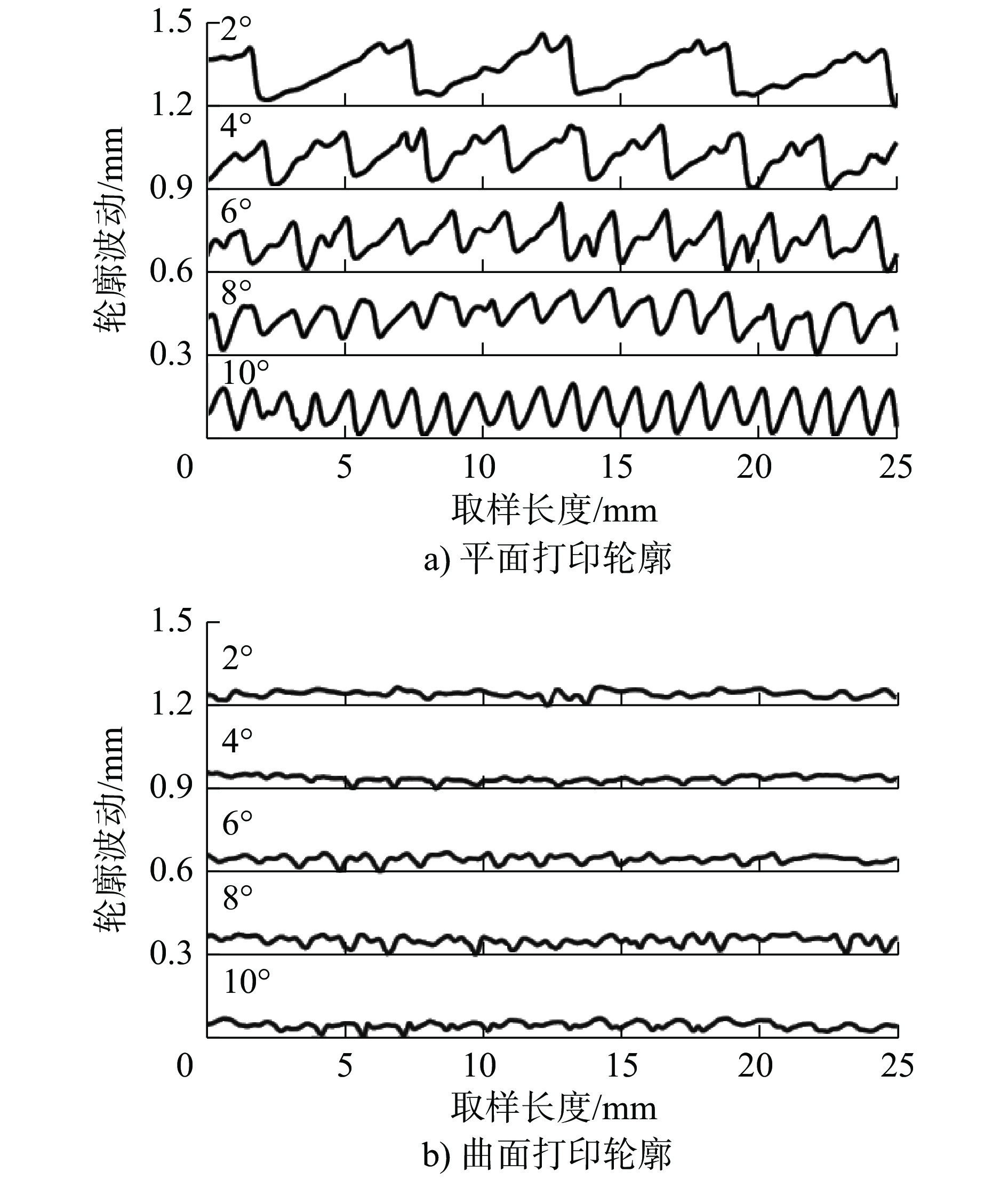
传统成型方式只使用平面层造成零件表面精度不高,针对这一问题研究了曲面混合分层切片,并提出了一种检测成型整体精度的方法。自动检测模型中可以曲面打印的部分,使用更加精准的邻域法向均值算法计算偏移曲面,并对原始模型进行处理生成平面基底;针对实际中较为复杂模型,编写了碰撞检测和成型顺序规划算法,可根据实际成型设备的情况生成无碰撞的刀具路径。最后,实测打印多个零件对比,证明曲面打印能够大幅提升表面质量,拥有更低的表面粗糙度和更高的整体精度。
传统成型方式只使用平面层造成零件表面精度不高,针对这一问题研究了曲面混合分层切片,并提出了一种检测成型整体精度的方法。自动检测模型中可以曲面打印的部分,使用更加精准的邻域法向均值算法计算偏移曲面,并对原始模型进行处理生成平面基底;针对实际中较为复杂模型,编写了碰撞检测和成型顺序规划算法,可根据实际成型设备的情况生成无碰撞的刀具路径。最后,实测打印多个零件对比,证明曲面打印能够大幅提升表面质量,拥有更低的表面粗糙度和更高的整体精度。

2023, 42(3): 446-452.
doi: 10.13433/j.cnki.1003-8728.20200583
摘要:
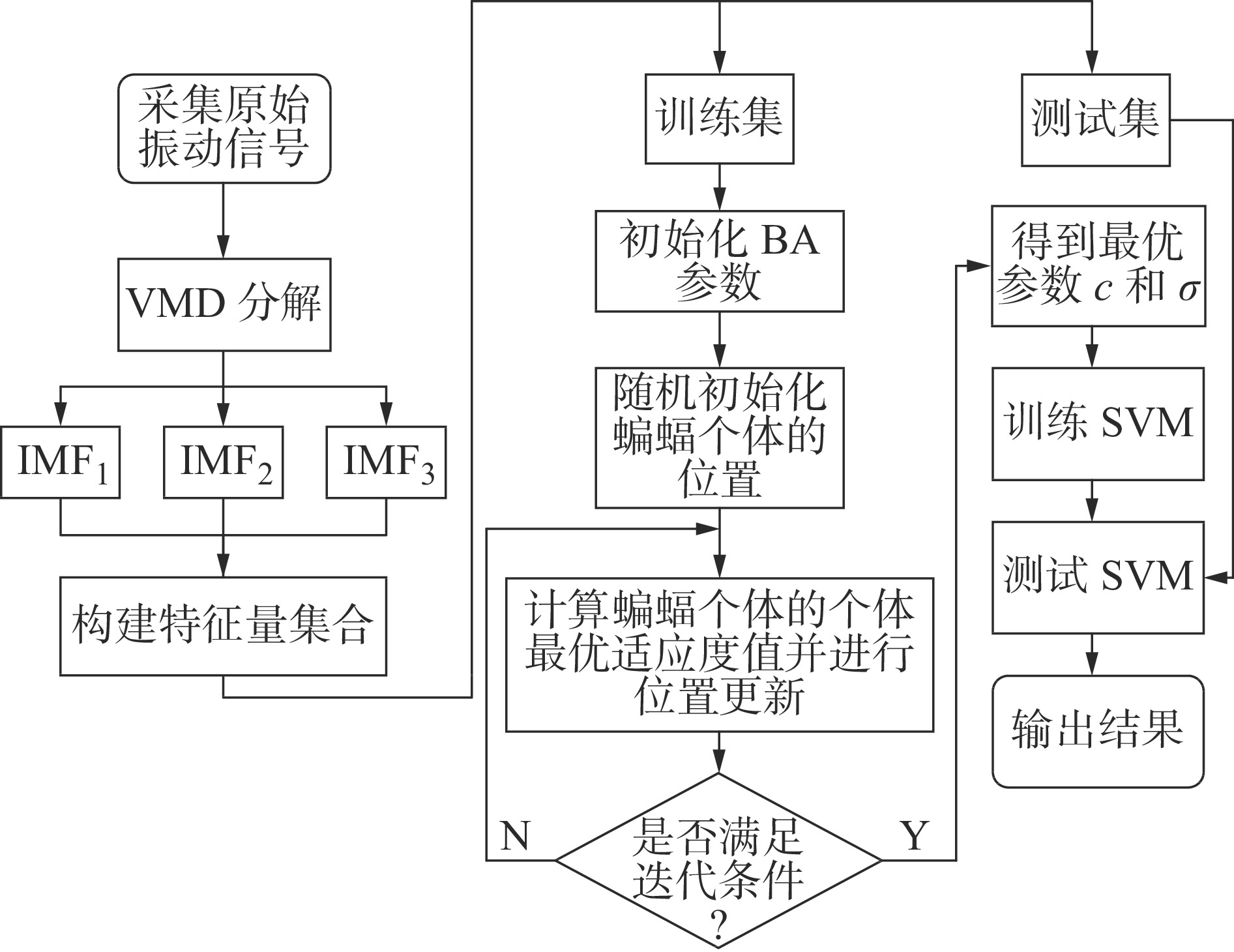
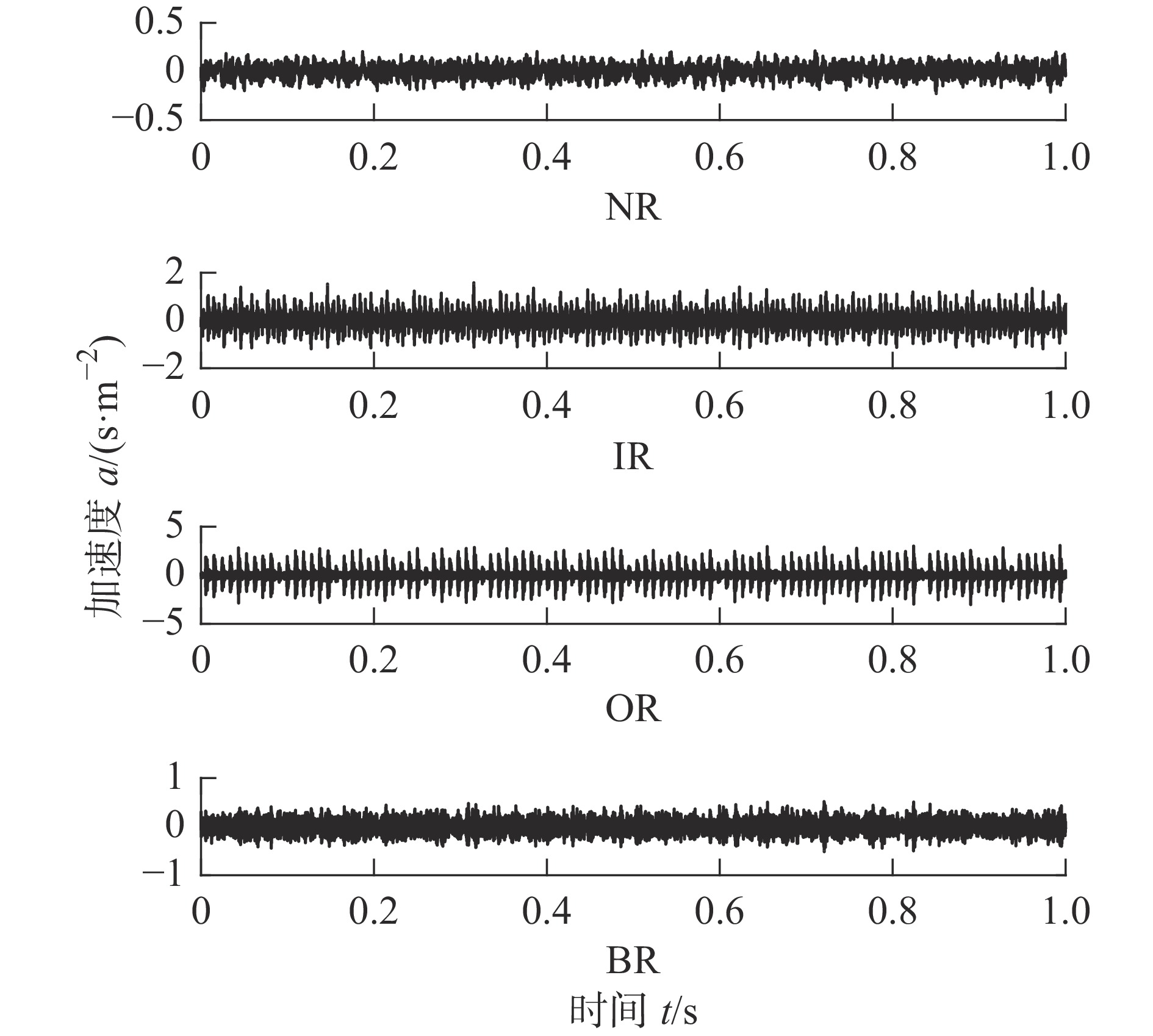
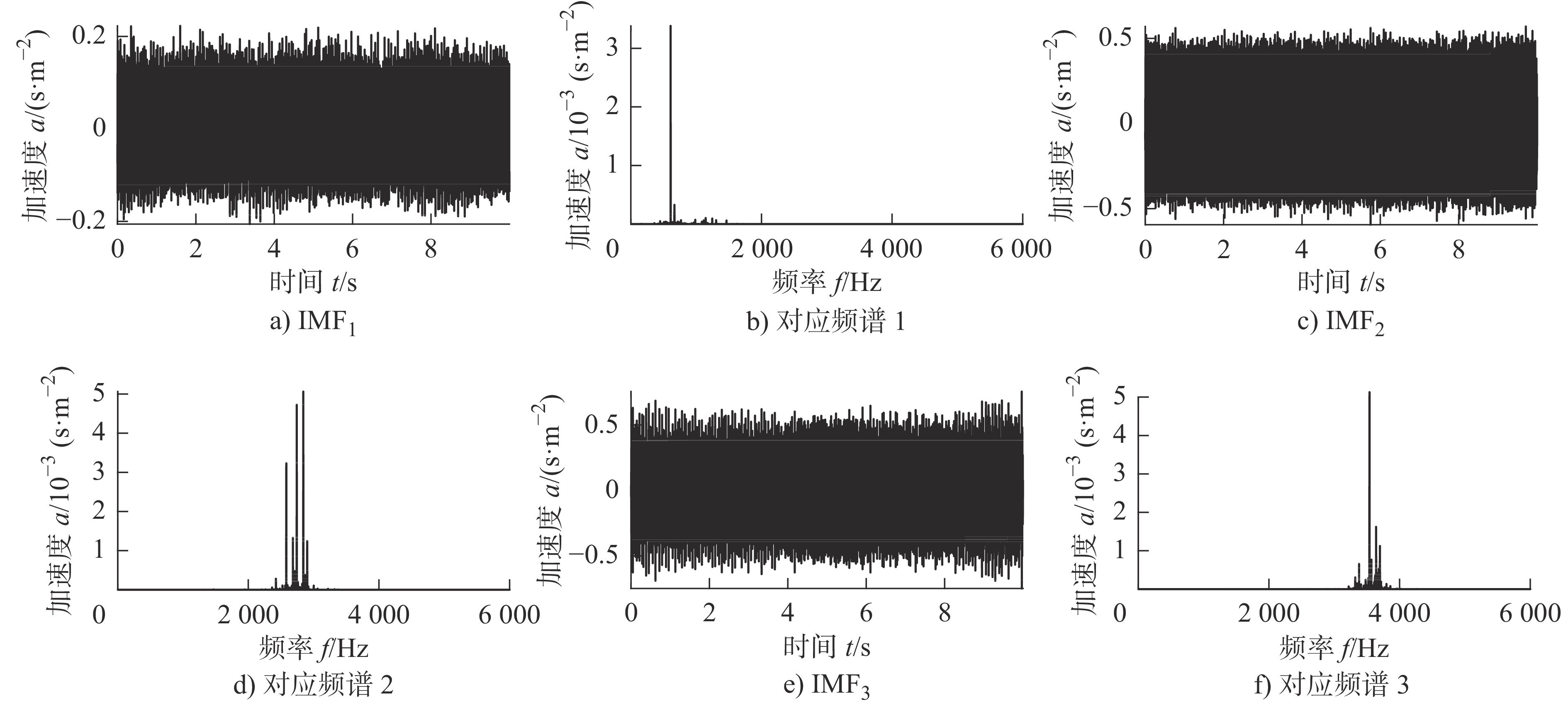
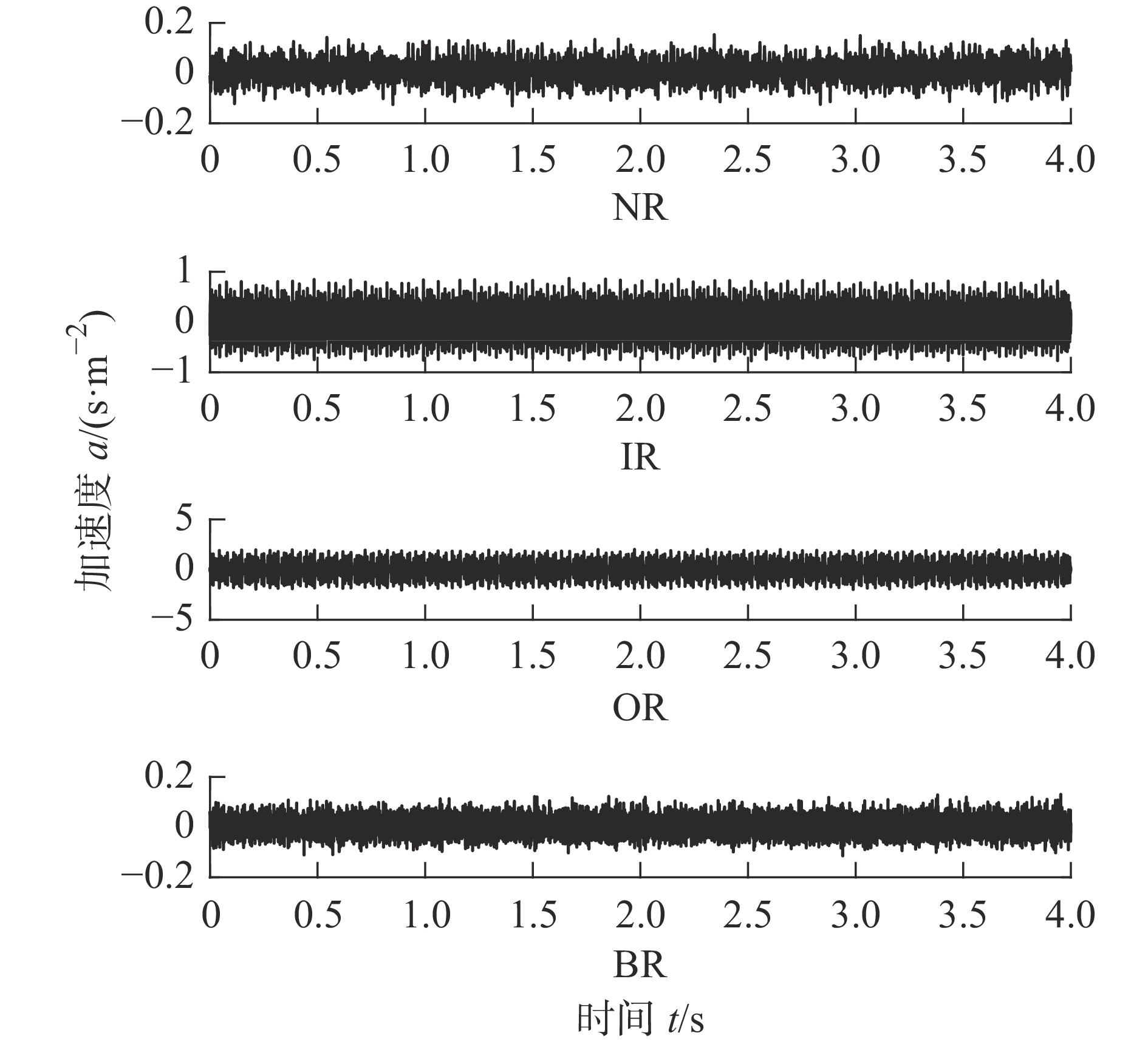
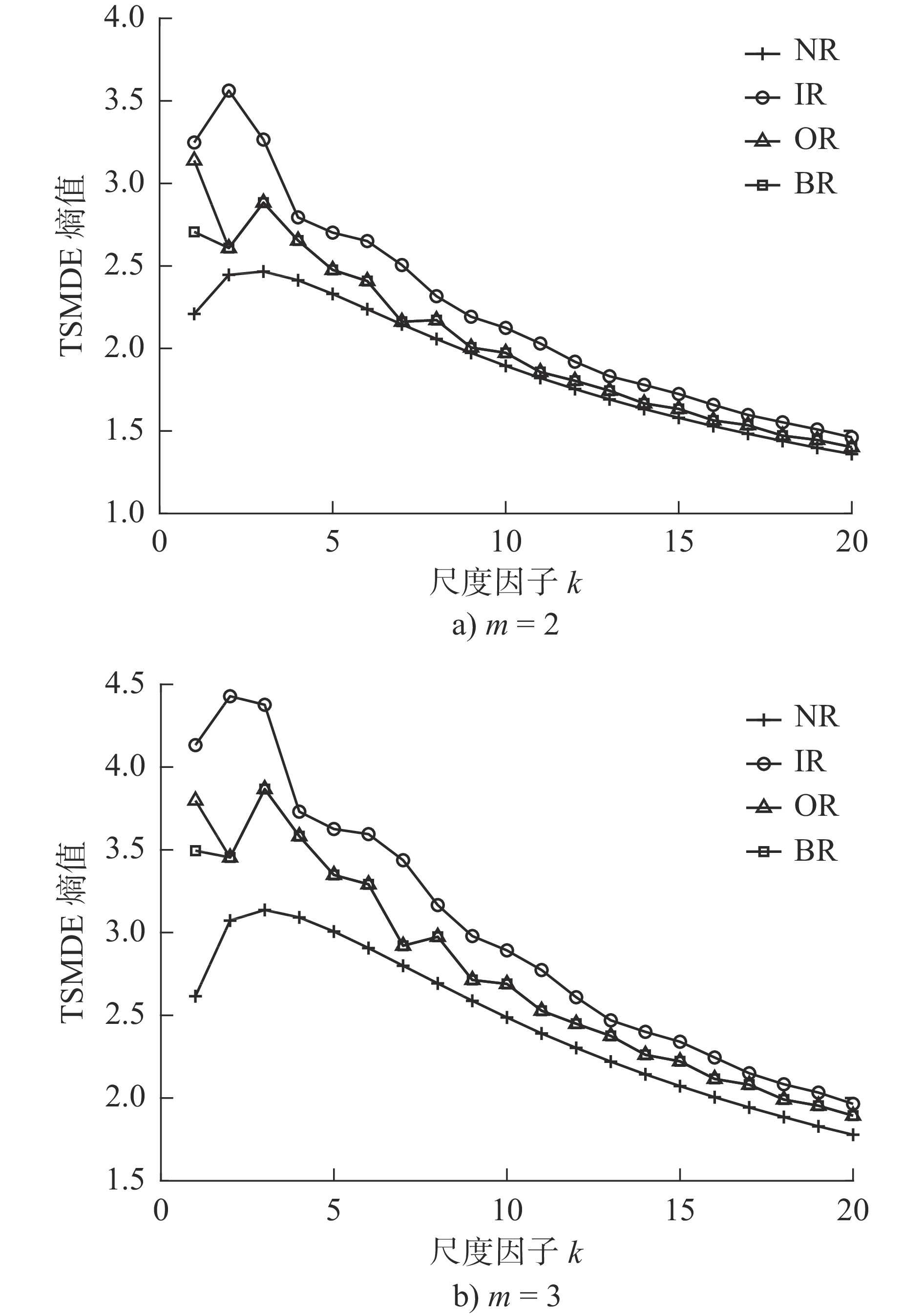
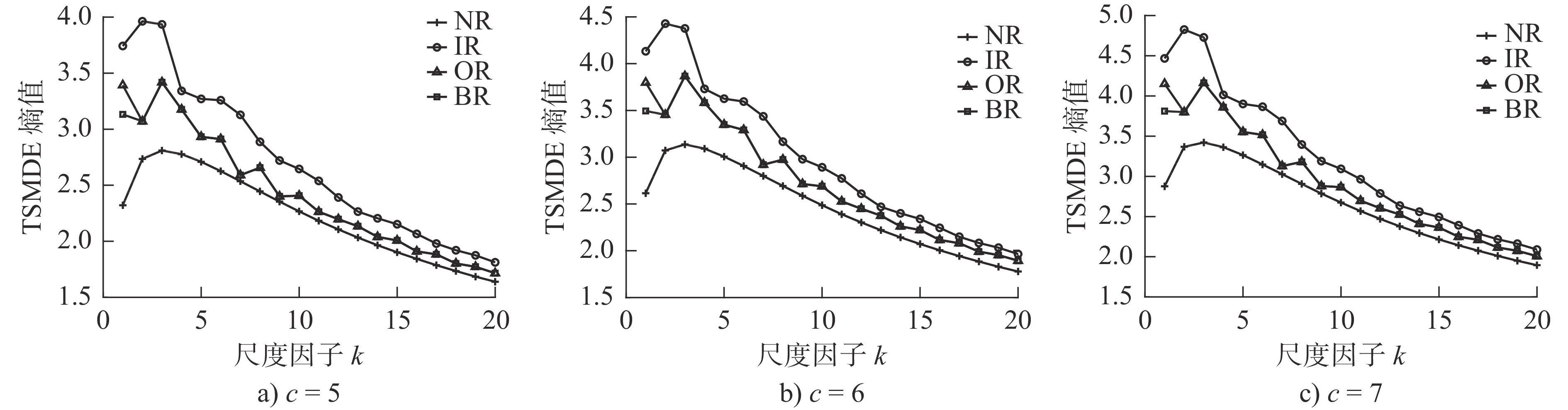
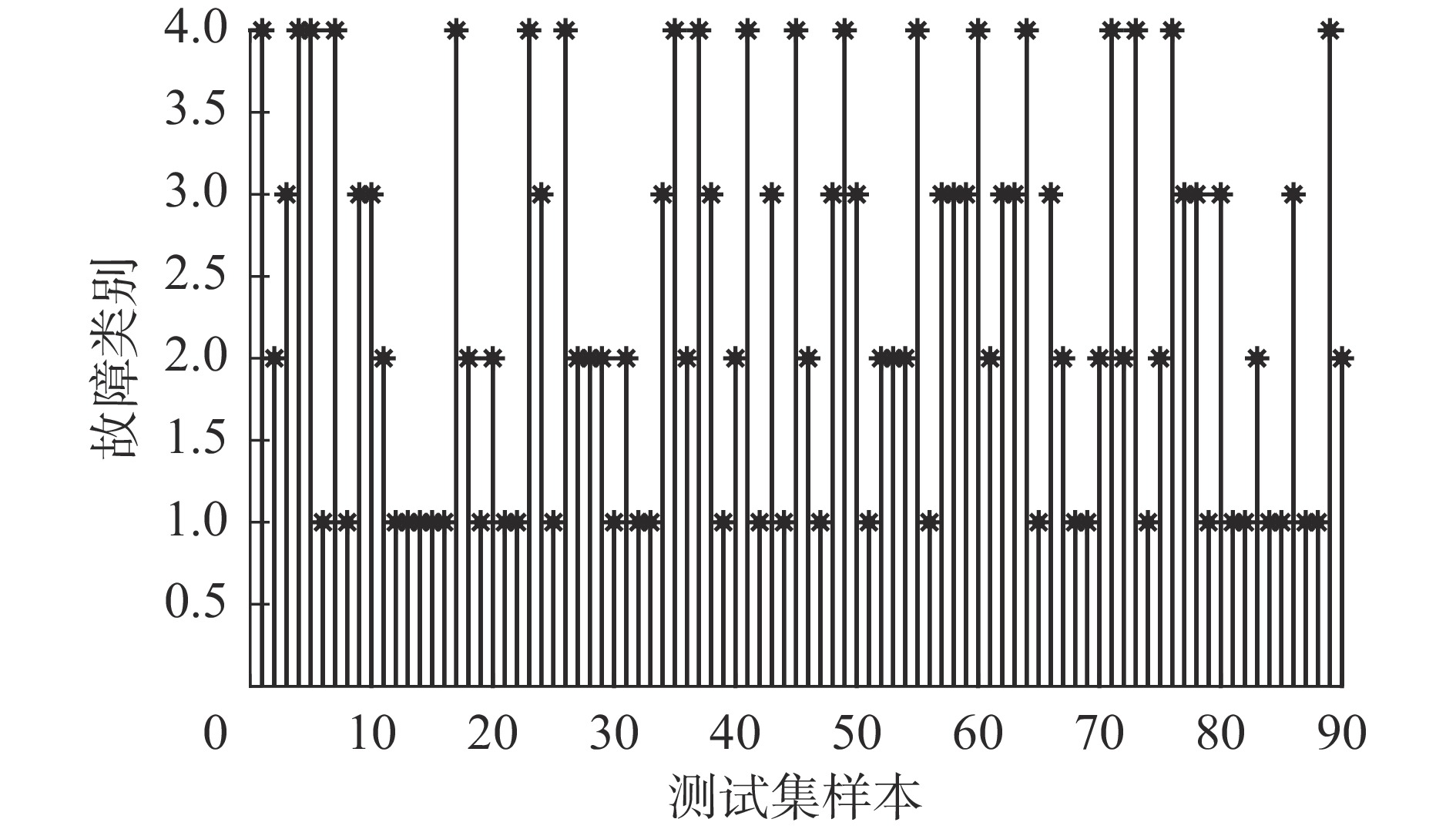
提出了一种基于变分模态分解(VMD)和时移多尺度散布熵(TSMDE)的故障特征提取结合改进的蝙蝠算法(IBA)来优化支持向量机(SVM)的滚动轴承故障诊断方法。通过变分模态分解,避免了模式混叠问题,提取各模态分量的散布熵构造故障特征向量,作为故障诊断模型的输入;提出了一种新的自适应速度权重因子用于构建改进的蝙蝠算法以优化支持向量机(IBA-SVM),实现了对不同故障类型的轴承进行分类;利用实验数据对提出的诊断方法进行验证,并与用粒子群算法(PSO)优化支持向量机(PSO-SVM)的诊断方法进行对比。结果表明所提出的方法分类准确率更高,用时更少。
提出了一种基于变分模态分解(VMD)和时移多尺度散布熵(TSMDE)的故障特征提取结合改进的蝙蝠算法(IBA)来优化支持向量机(SVM)的滚动轴承故障诊断方法。通过变分模态分解,避免了模式混叠问题,提取各模态分量的散布熵构造故障特征向量,作为故障诊断模型的输入;提出了一种新的自适应速度权重因子用于构建改进的蝙蝠算法以优化支持向量机(IBA-SVM),实现了对不同故障类型的轴承进行分类;利用实验数据对提出的诊断方法进行验证,并与用粒子群算法(PSO)优化支持向量机(PSO-SVM)的诊断方法进行对比。结果表明所提出的方法分类准确率更高,用时更少。

2023, 42(3): 453-461.
doi: 10.13433/j.cnki.1003-8728.20200558
摘要:
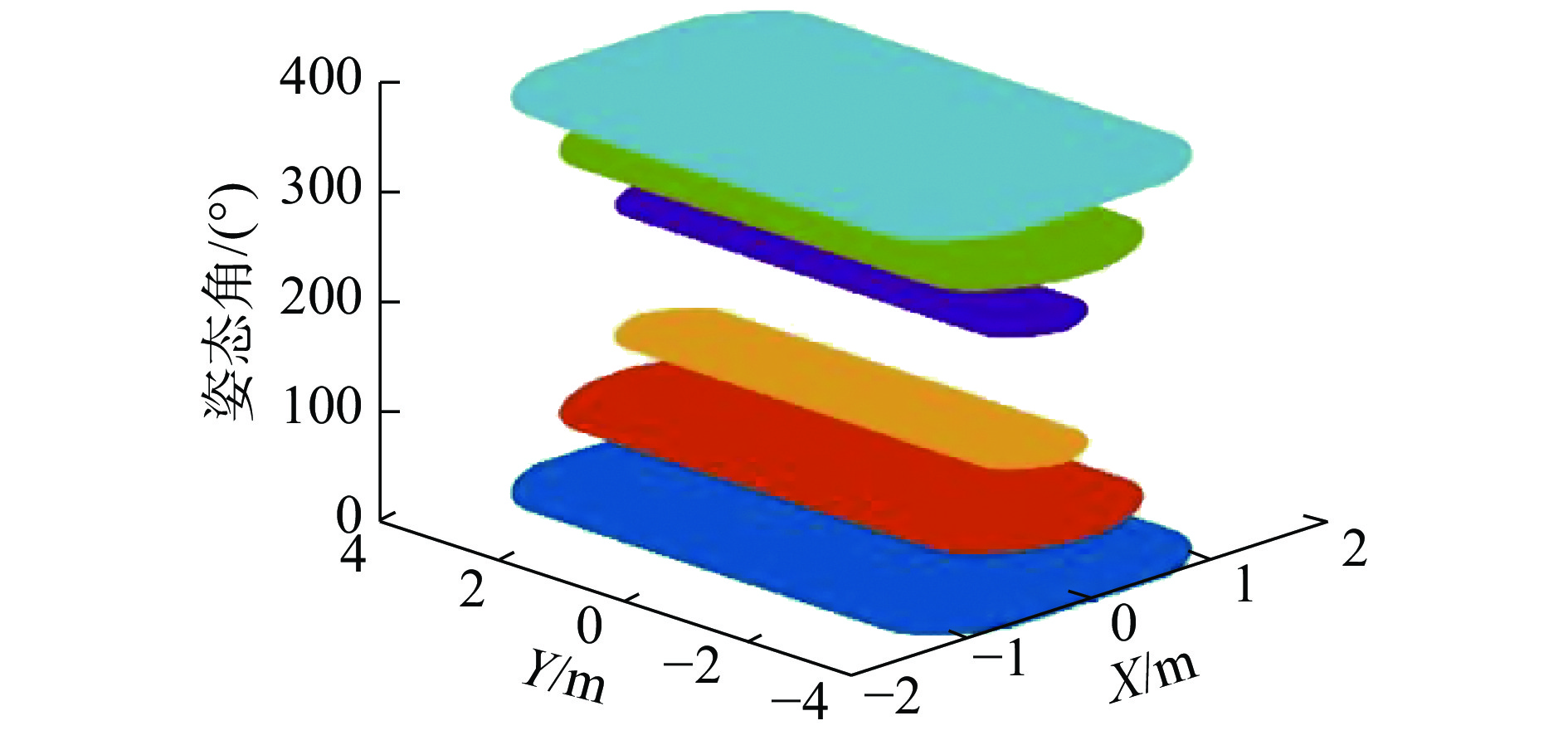
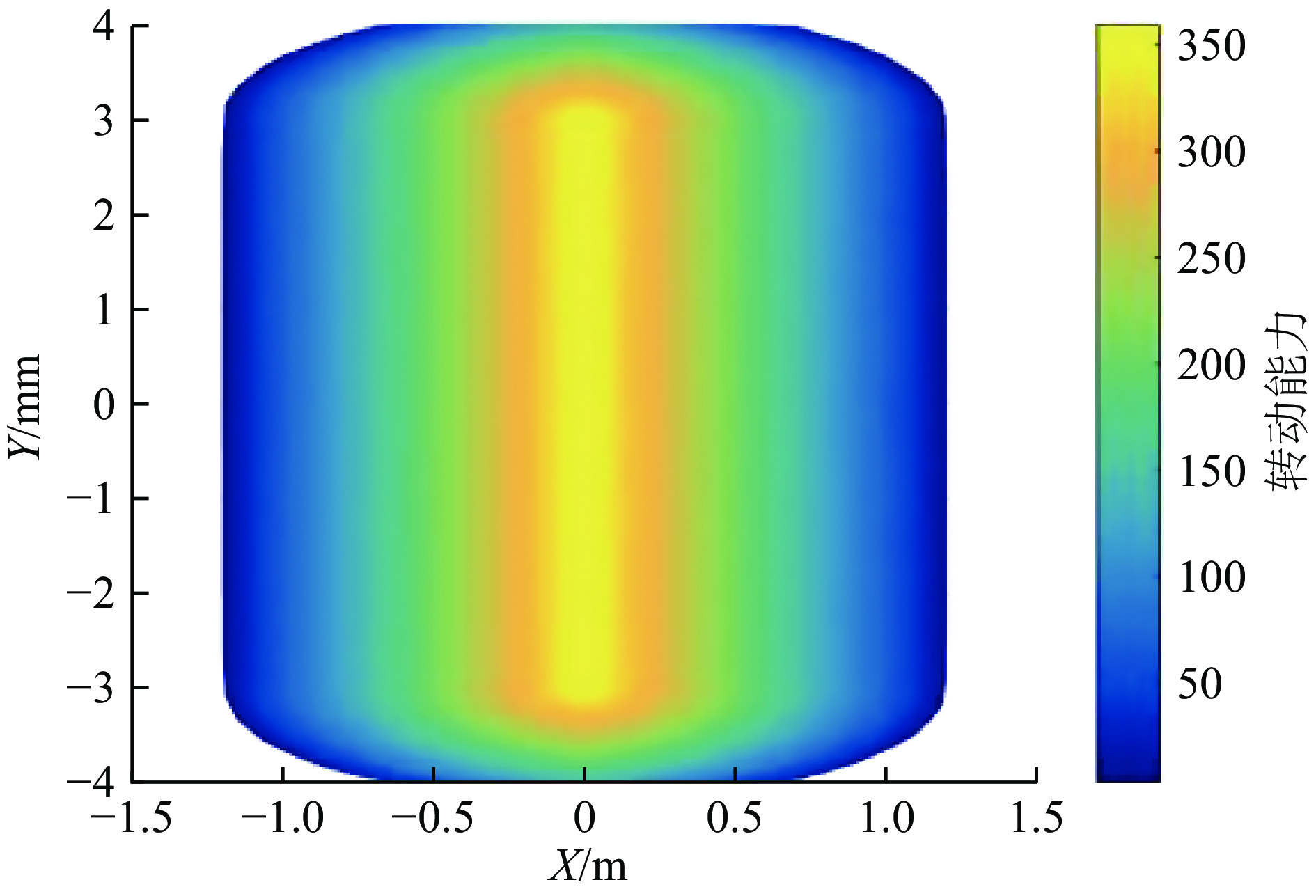
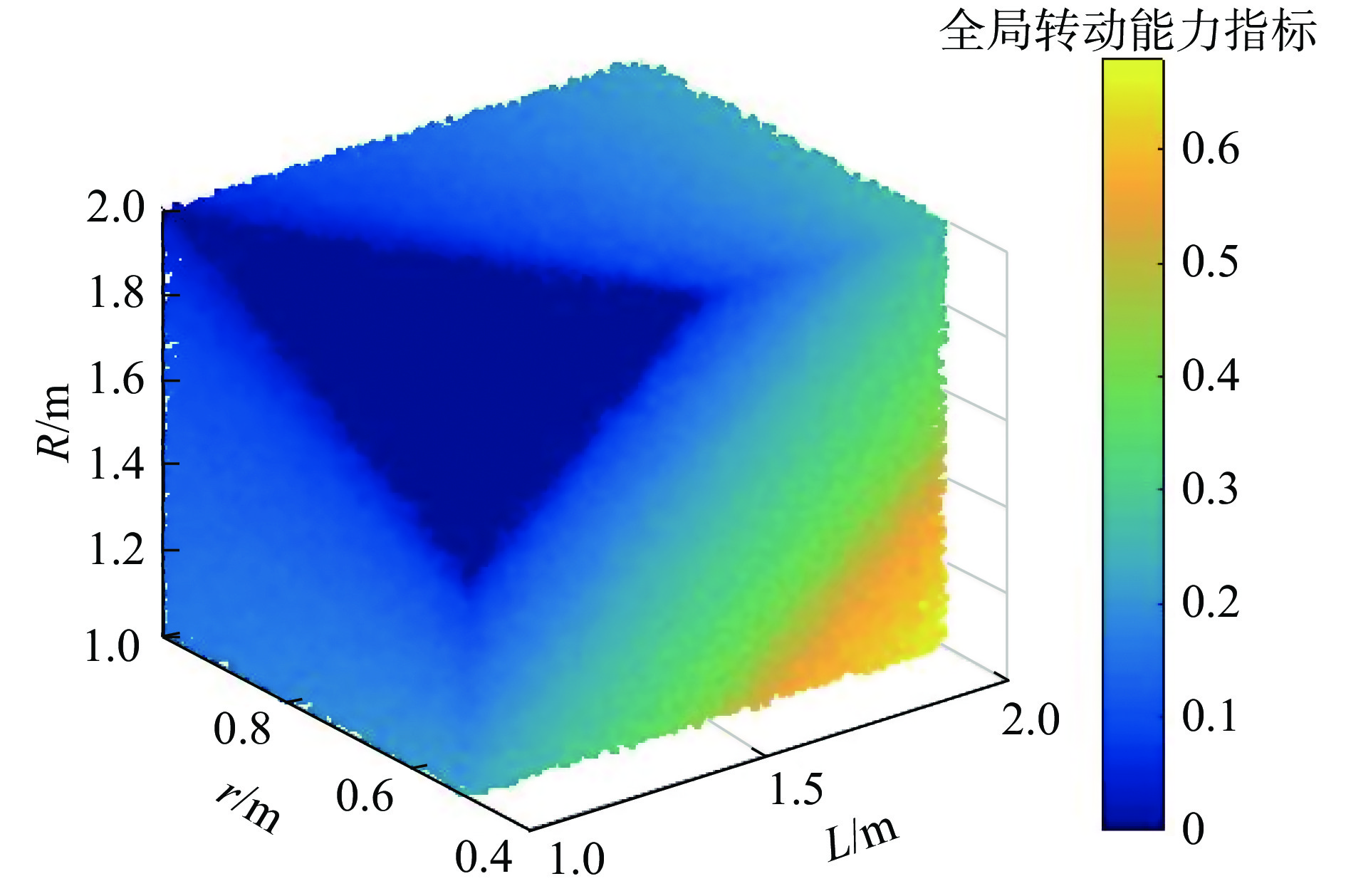
以并联机构2T1R作为研究对象,基于并联机构拓扑结构设计理论综合出一类支链含Pa平行四边形机构的2T1R并联机构,并优选出两种新型2PRPaR-PPaR与2RRPaR-PPaR并联机构,以2PRPaR-PPaR并联机构为例,利用方位特征集拓扑结构理论计算机构的方位特征集、自由度、耦合度等拓扑特性,根据建立的特征方程并得到机构的运动学逆解解析式。基于此,分别对机构的工作空间、灵巧度、转动能力等性能指标可视化分析,并通过图形化对比分析机构参数对这些性能指标的影响,最后建立工作空间和全局灵巧度多目标优化模型,选择快速非支配多目标优化算法(NSGA-Ⅱ)实现机构尺度综合,结果表明:2PRPaR-PPaR机构具有工作空间较大、灵巧度较好、转动能力高等优良特性,优化出一组不同姿态角下的对工作空间和全局灵巧度的多目标pareto优化解。
以并联机构2T1R作为研究对象,基于并联机构拓扑结构设计理论综合出一类支链含Pa平行四边形机构的2T1R并联机构,并优选出两种新型2PRPaR-PPaR与2RRPaR-PPaR并联机构,以2PRPaR-PPaR并联机构为例,利用方位特征集拓扑结构理论计算机构的方位特征集、自由度、耦合度等拓扑特性,根据建立的特征方程并得到机构的运动学逆解解析式。基于此,分别对机构的工作空间、灵巧度、转动能力等性能指标可视化分析,并通过图形化对比分析机构参数对这些性能指标的影响,最后建立工作空间和全局灵巧度多目标优化模型,选择快速非支配多目标优化算法(NSGA-Ⅱ)实现机构尺度综合,结果表明:2PRPaR-PPaR机构具有工作空间较大、灵巧度较好、转动能力高等优良特性,优化出一组不同姿态角下的对工作空间和全局灵巧度的多目标pareto优化解。








2023, 42(3): 462-467.
doi: 10.13433/j.cnki.1003-8728.20200600
摘要:
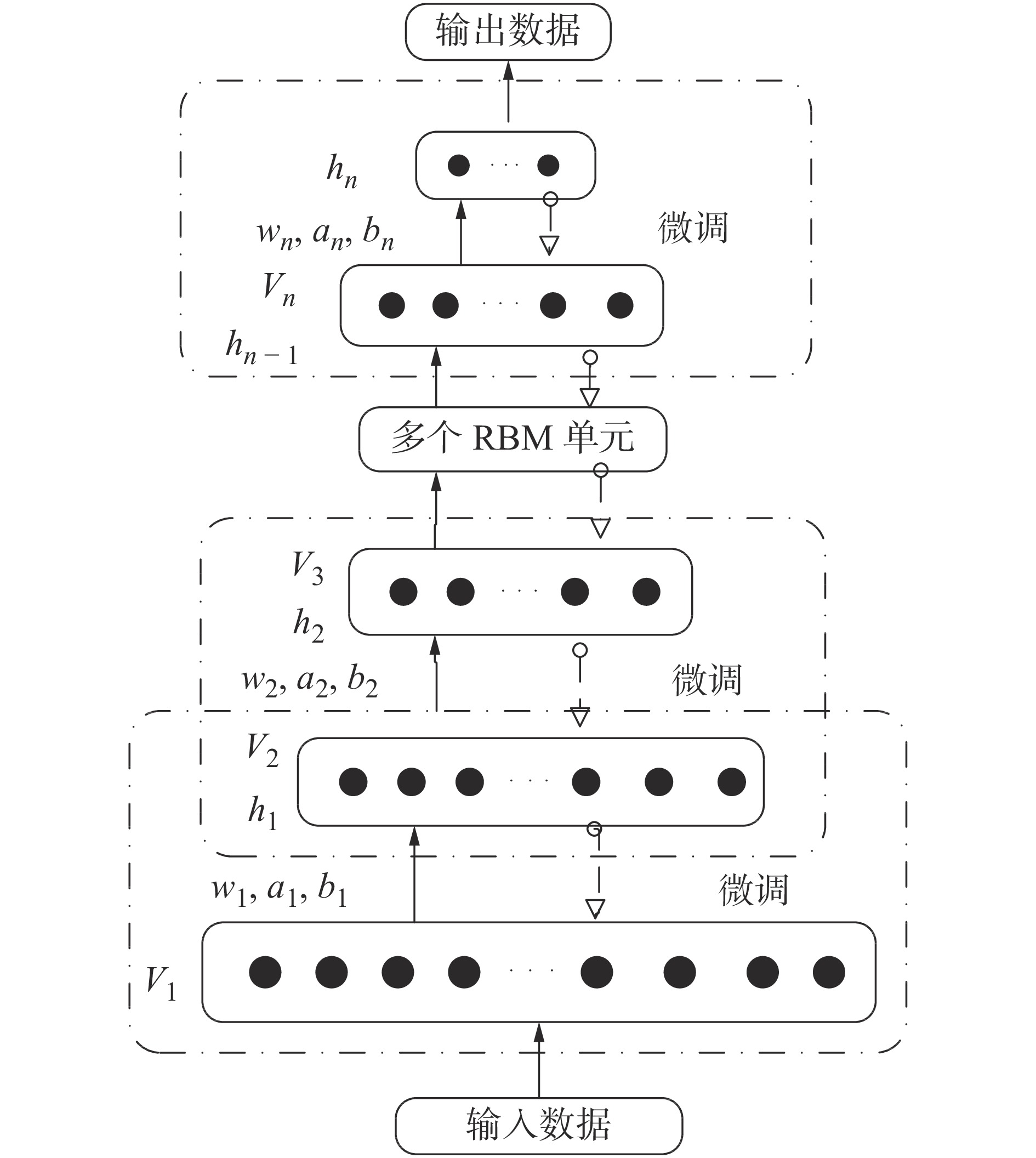
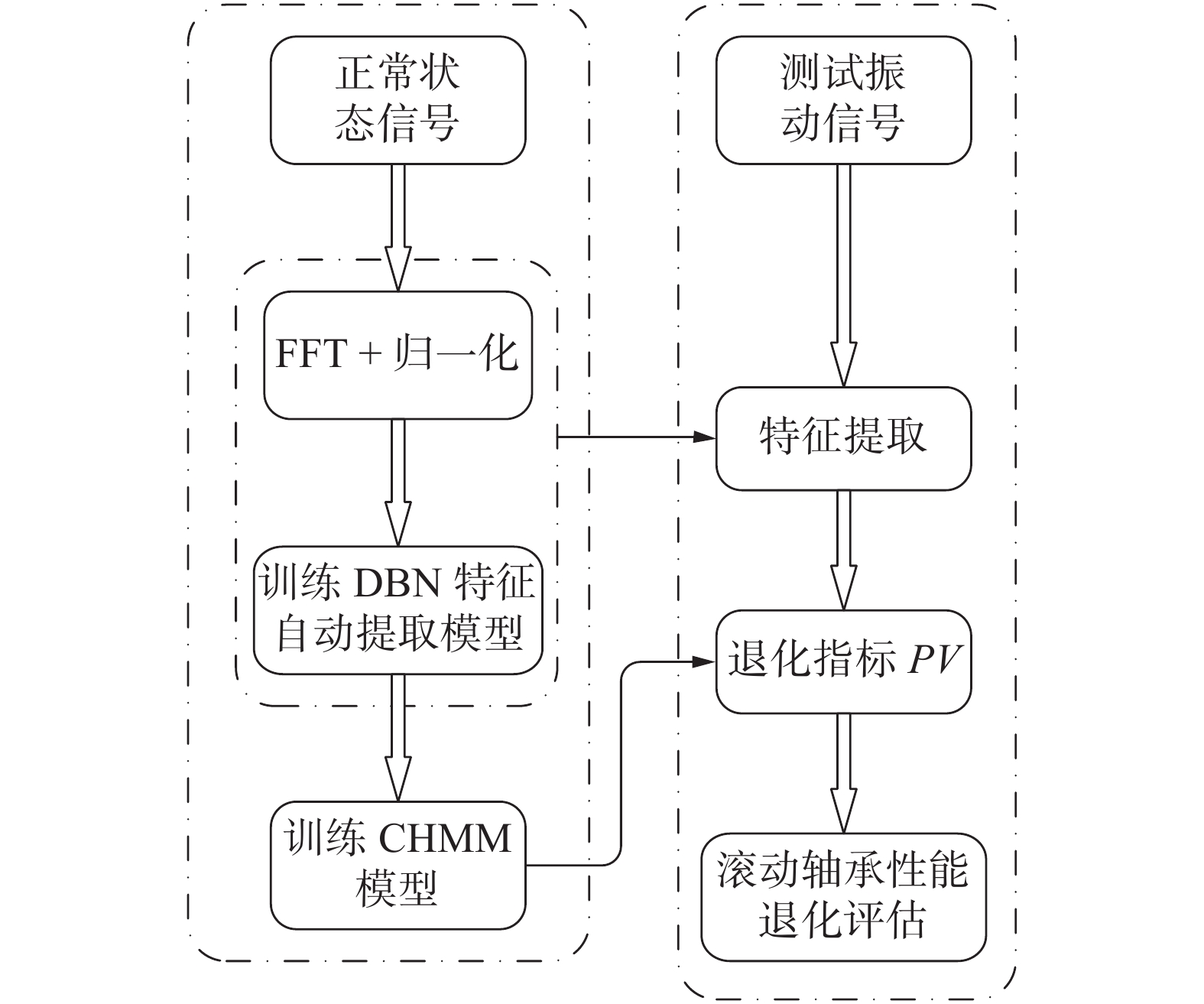
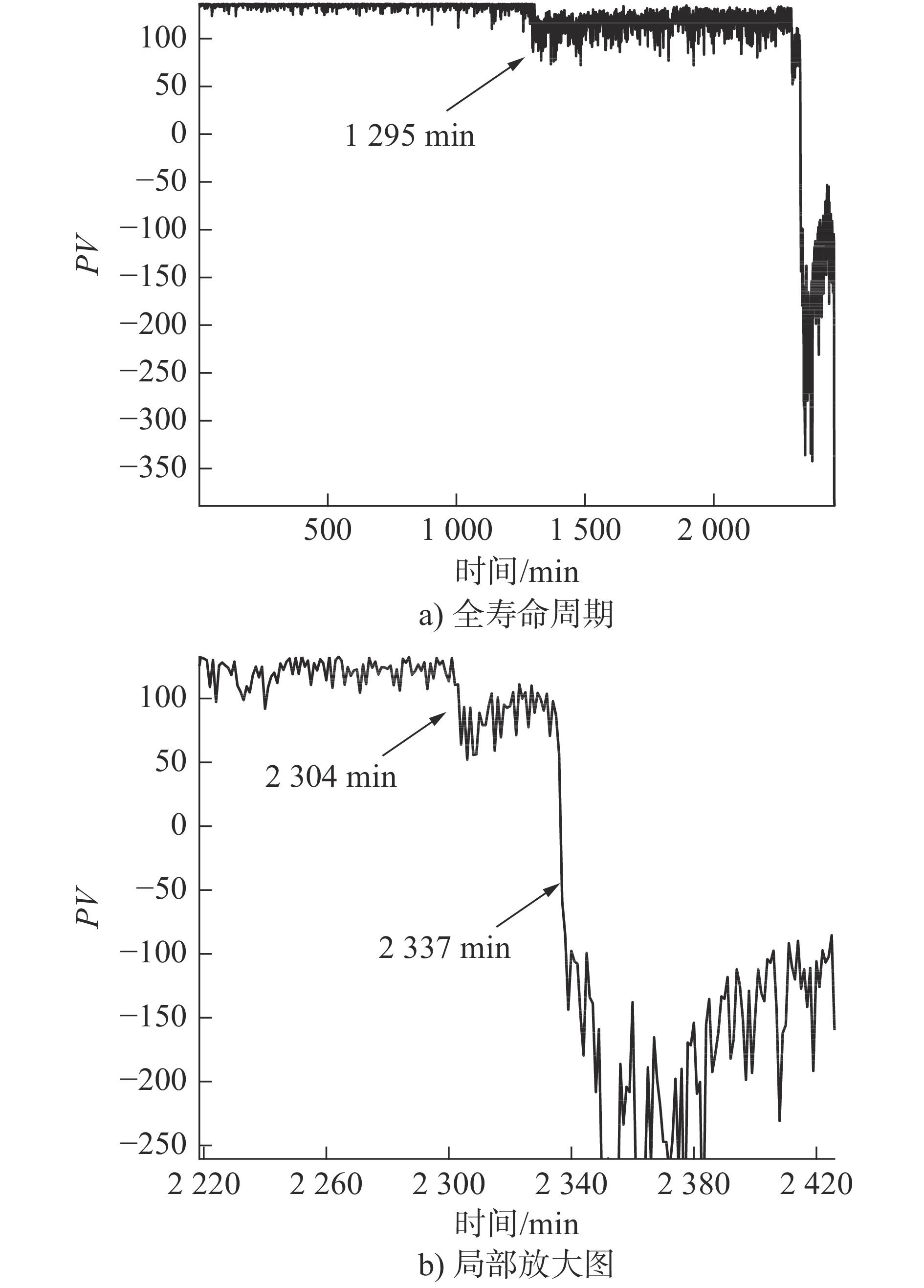
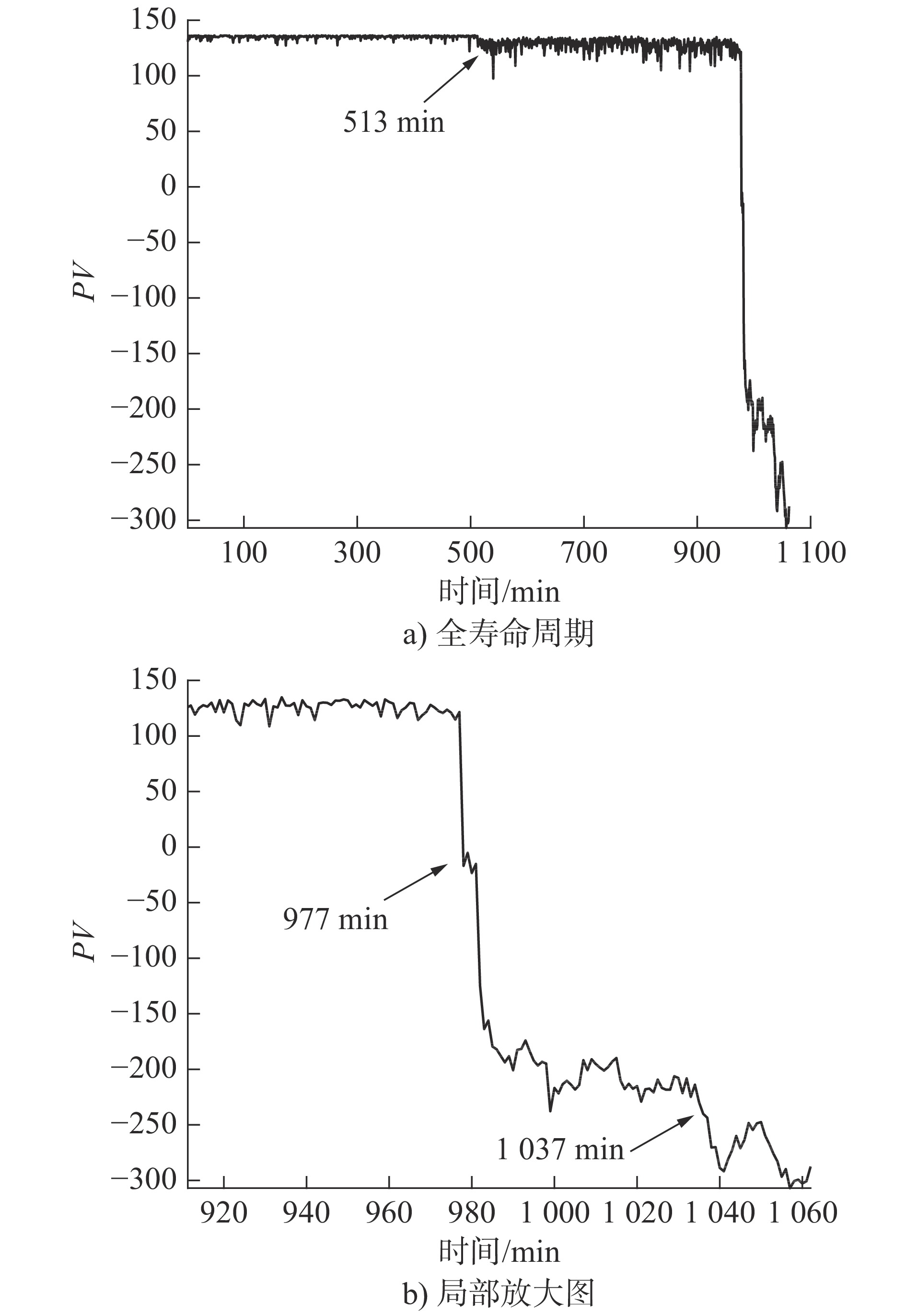
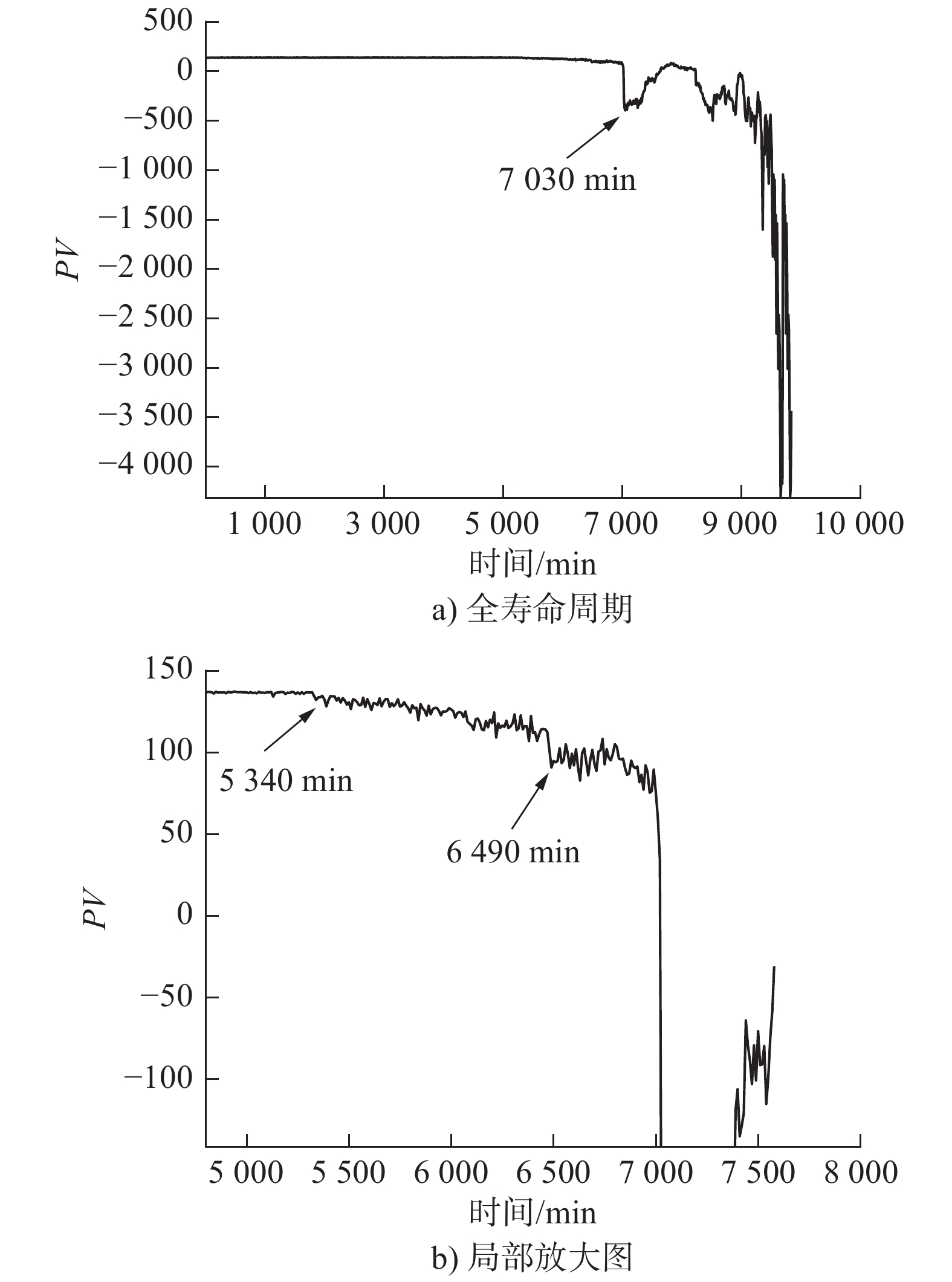
针对现有退化评估方法应用情境单一,特征指标筛选依赖人工经验,提出了一种基于深度置信网络(Deep belief network, DBN)和连续隐马尔科夫(Continuous hidden markov model, CHMM)相结合的滚动轴承性能退化评估方法。将滚动轴承正常状态下的振动信号处理为归一化幅值谱,以此作为DBN特征自动提取模型的输入,并使用CHMM做评估模型,其中CHMM的训练样本即通过DBN提取的正常状态下的特征向量。通过不同情境下的滚动轴承全寿命周期实验数据验证了所提模型的有效性。与近期有关文献所提方法进行比较,该方法避免了人工选择特征指标,且对早期微弱故障检测具有一定的敏感性。
针对现有退化评估方法应用情境单一,特征指标筛选依赖人工经验,提出了一种基于深度置信网络(Deep belief network, DBN)和连续隐马尔科夫(Continuous hidden markov model, CHMM)相结合的滚动轴承性能退化评估方法。将滚动轴承正常状态下的振动信号处理为归一化幅值谱,以此作为DBN特征自动提取模型的输入,并使用CHMM做评估模型,其中CHMM的训练样本即通过DBN提取的正常状态下的特征向量。通过不同情境下的滚动轴承全寿命周期实验数据验证了所提模型的有效性。与近期有关文献所提方法进行比较,该方法避免了人工选择特征指标,且对早期微弱故障检测具有一定的敏感性。
2023, 42(3): 468-474.
doi: 10.13433/j.cnki.1003-8728.20200631
摘要:
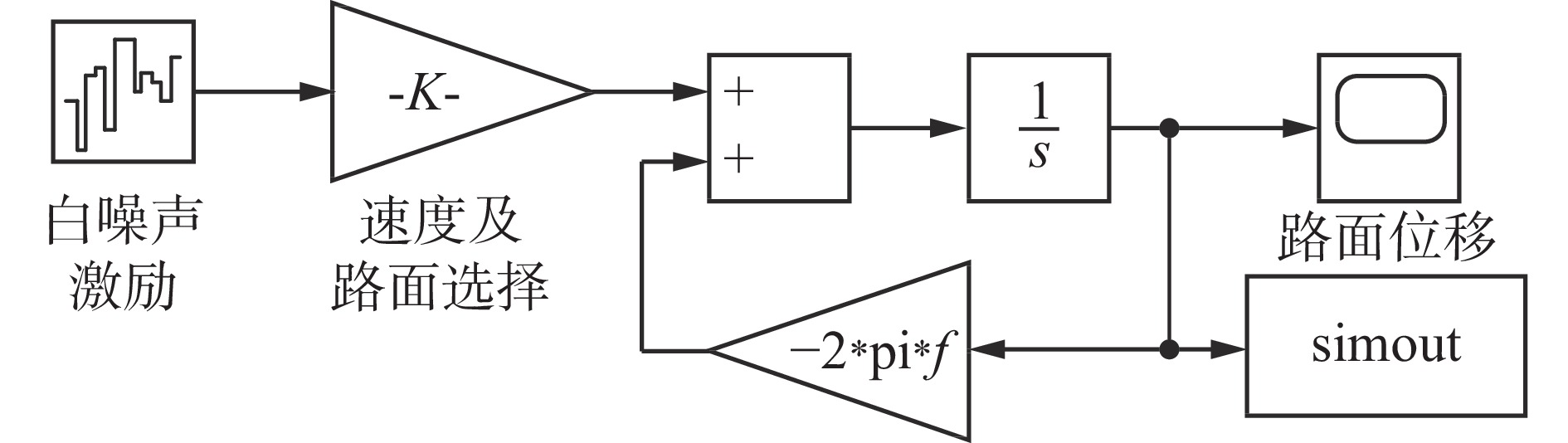
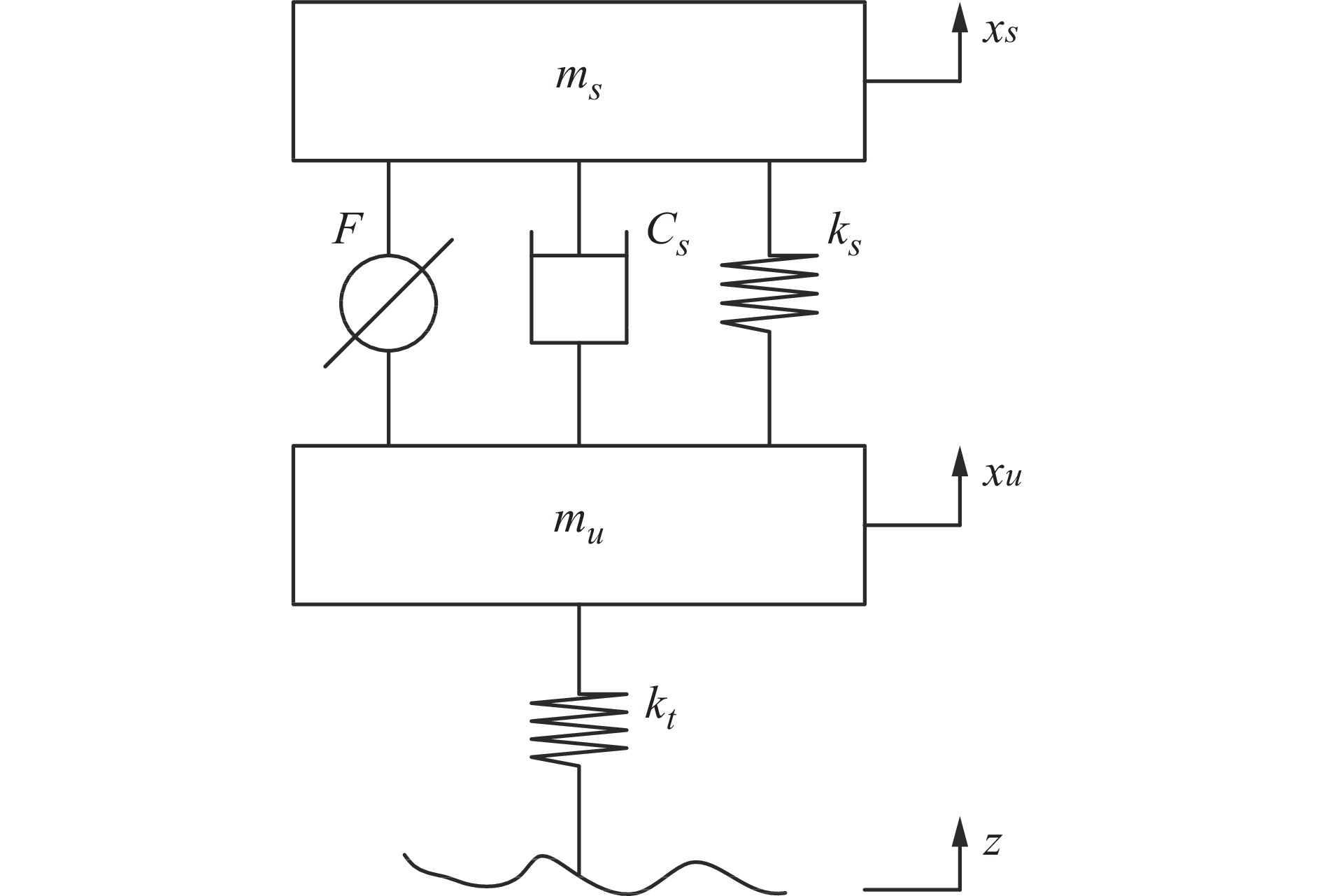
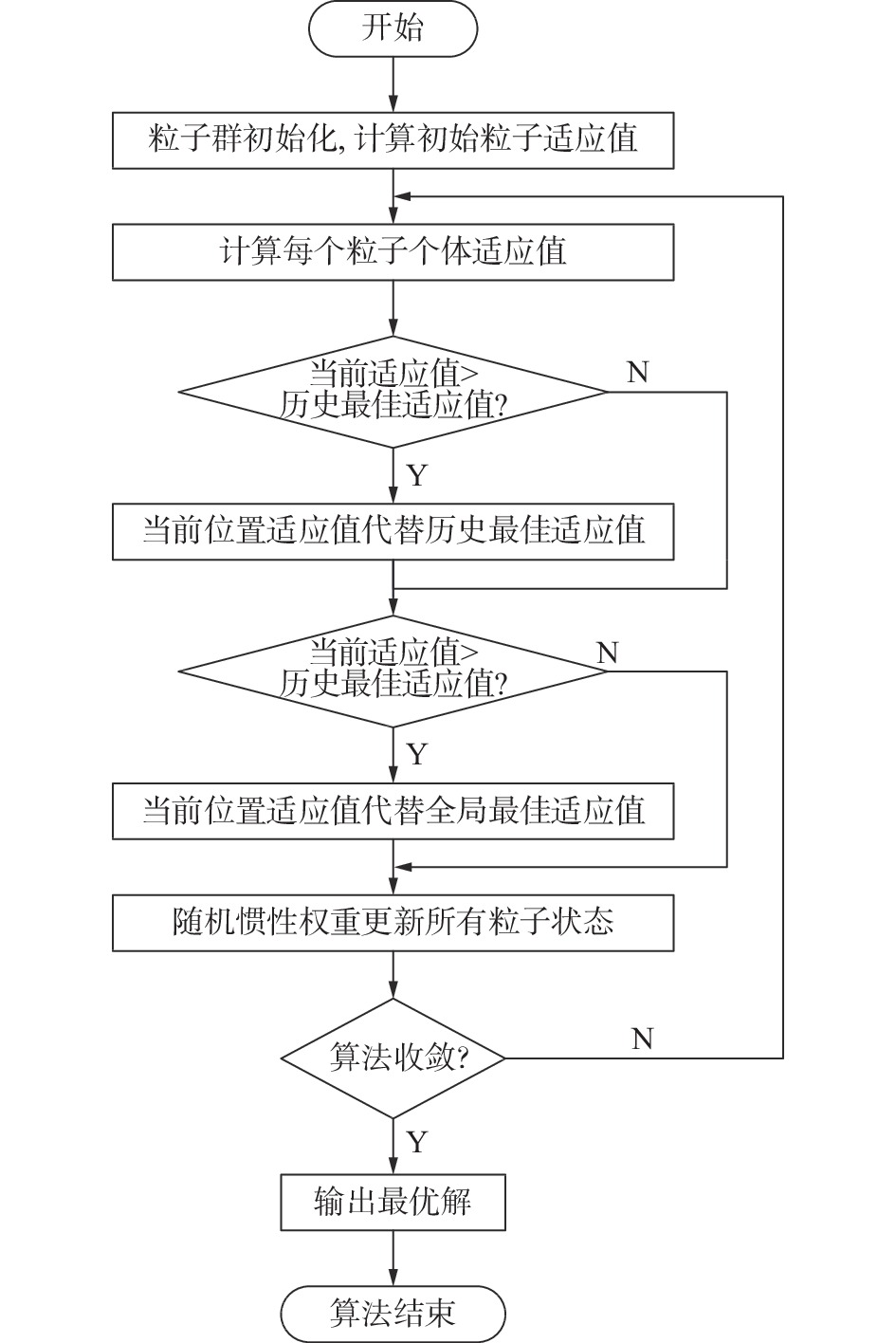
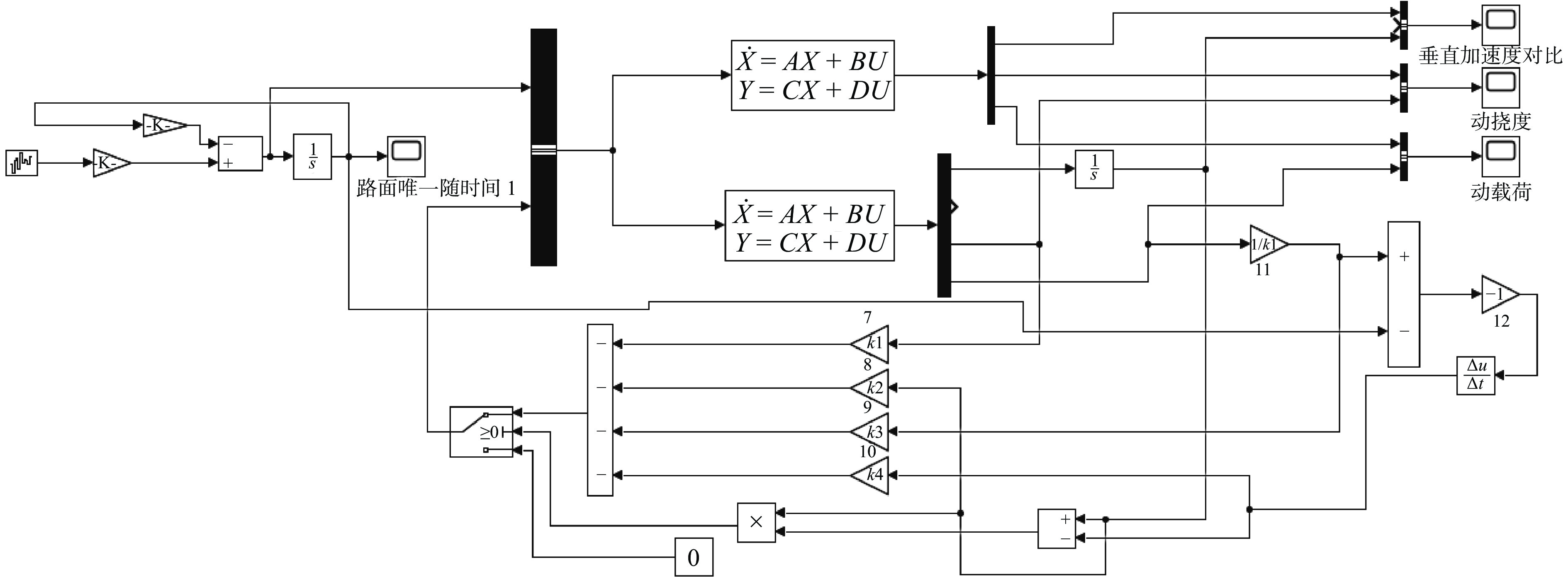
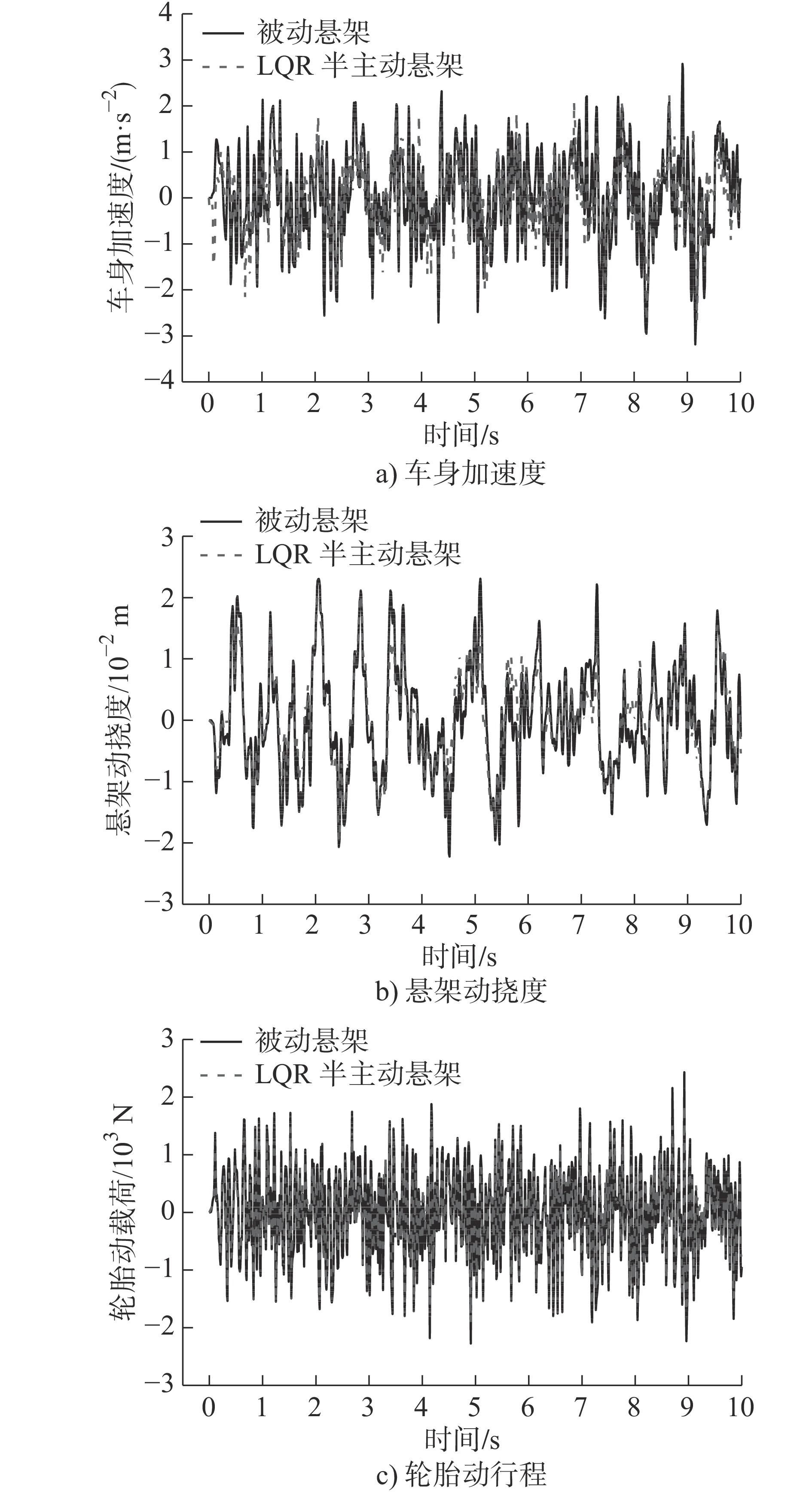
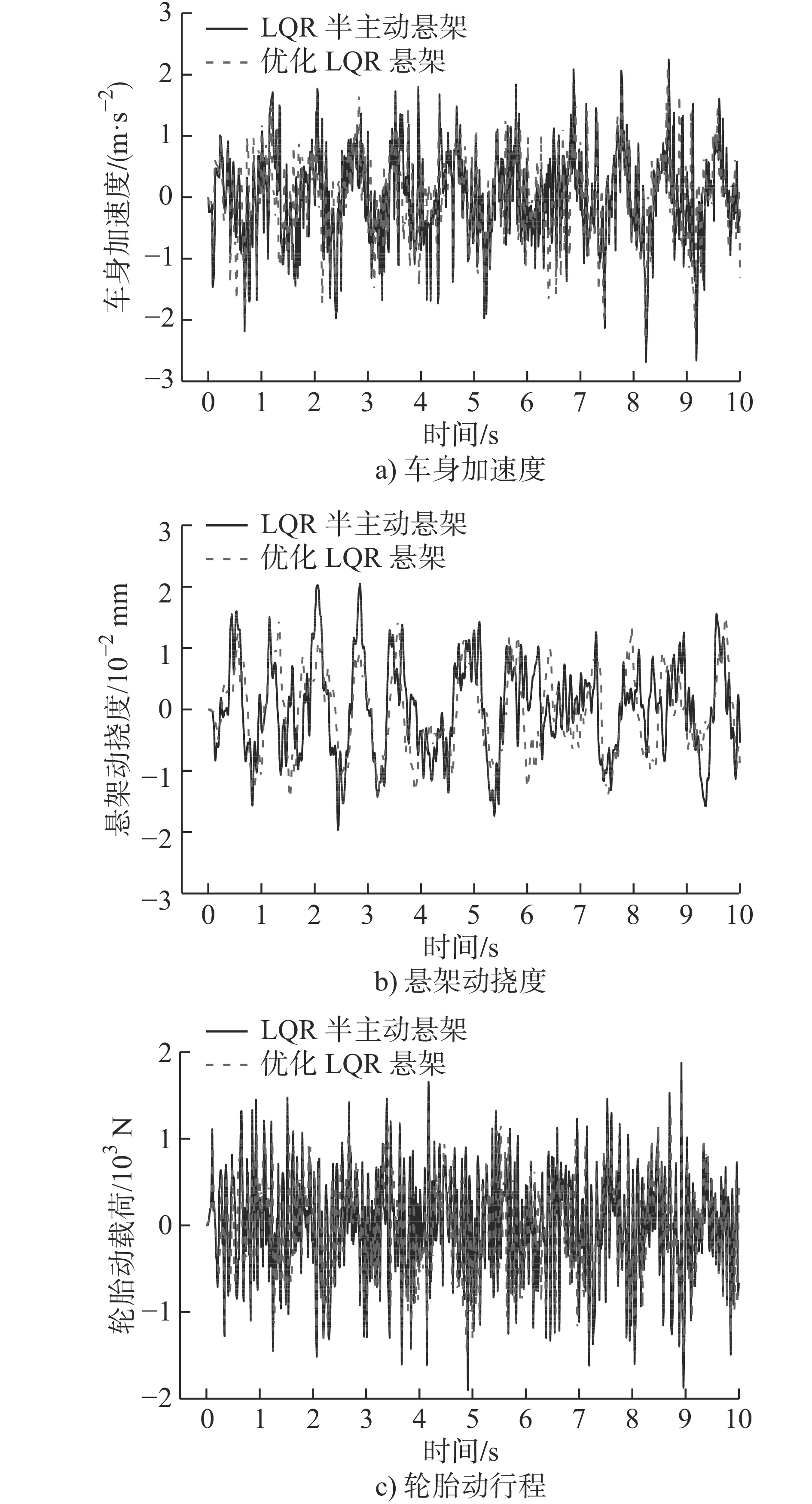
针对车辆半主动悬架LQR控制中Q矩阵和R矩阵往往由经验取值的问题,提出一种基于改进粒子群算法的LQR控制方法。该算法采用随机惯性权重代替了传统粒子群算法的固定惯性权重,提高了求解精度和效率,得到了更加具有适应性的LQR控制矩阵系数。为验证此方法的有效性,基于天棚阻尼模型建立1/4车被动悬架模型和半主动悬架模型,利用线性二次最优控制建立LQR控制器,并利用优化算法得到新的控制矩阵。通过仿真对比被动悬架、LQR控制的LQR半主动悬架、改进粒子群算法优化后的优化LQR悬架的各项性能参数,发现优化LQR悬架在悬架动挠度没有受到影响的前提下,使车辆的垂向加速度和轮胎动载荷得到有效降低,提高了车辆的行驶平顺性和操纵安全性。
针对车辆半主动悬架LQR控制中Q矩阵和R矩阵往往由经验取值的问题,提出一种基于改进粒子群算法的LQR控制方法。该算法采用随机惯性权重代替了传统粒子群算法的固定惯性权重,提高了求解精度和效率,得到了更加具有适应性的LQR控制矩阵系数。为验证此方法的有效性,基于天棚阻尼模型建立1/4车被动悬架模型和半主动悬架模型,利用线性二次最优控制建立LQR控制器,并利用优化算法得到新的控制矩阵。通过仿真对比被动悬架、LQR控制的LQR半主动悬架、改进粒子群算法优化后的优化LQR悬架的各项性能参数,发现优化LQR悬架在悬架动挠度没有受到影响的前提下,使车辆的垂向加速度和轮胎动载荷得到有效降低,提高了车辆的行驶平顺性和操纵安全性。

2023, 42(3): 475-483.
doi: 10.13433/j.cnki.1003-8728.20200603
摘要:
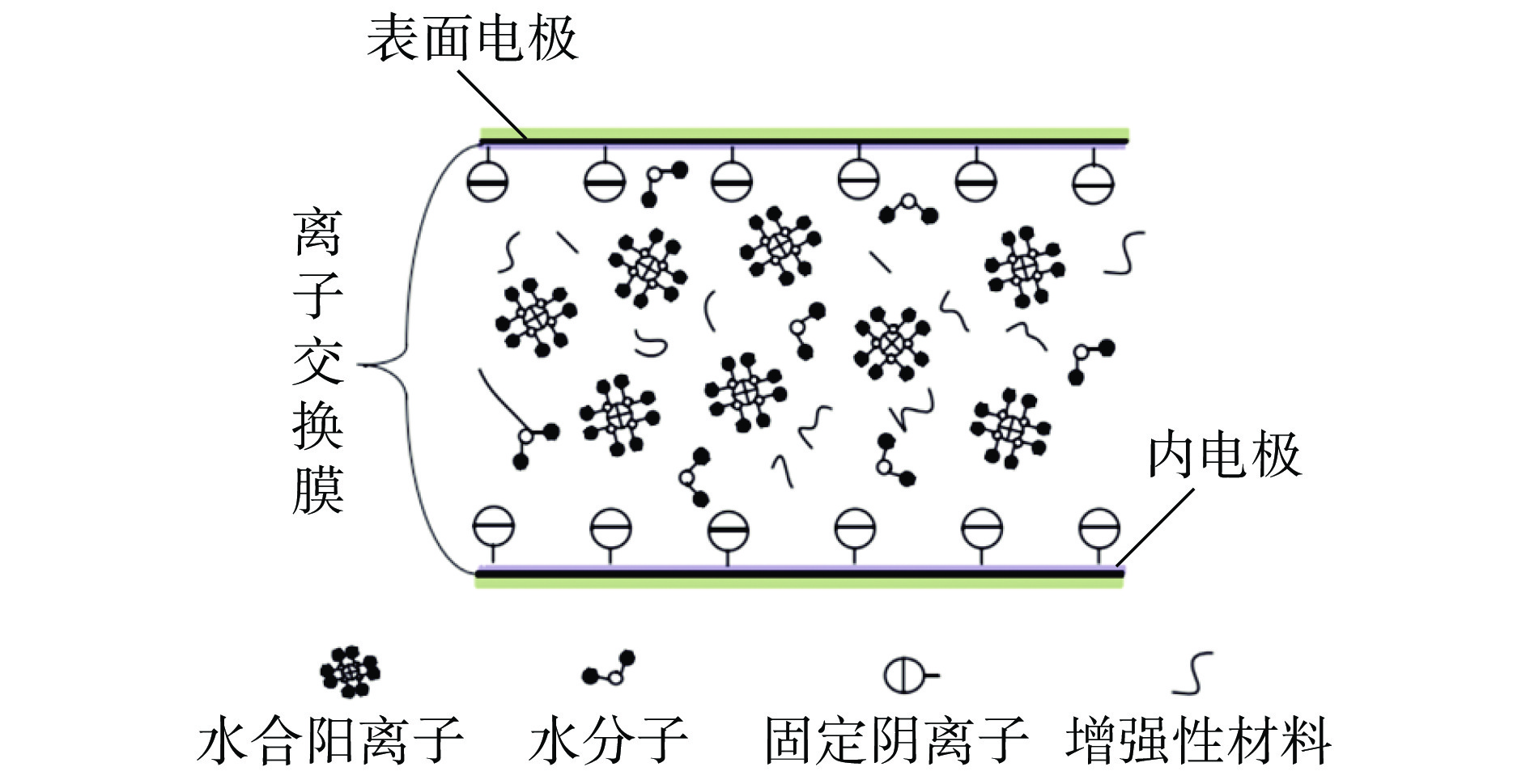
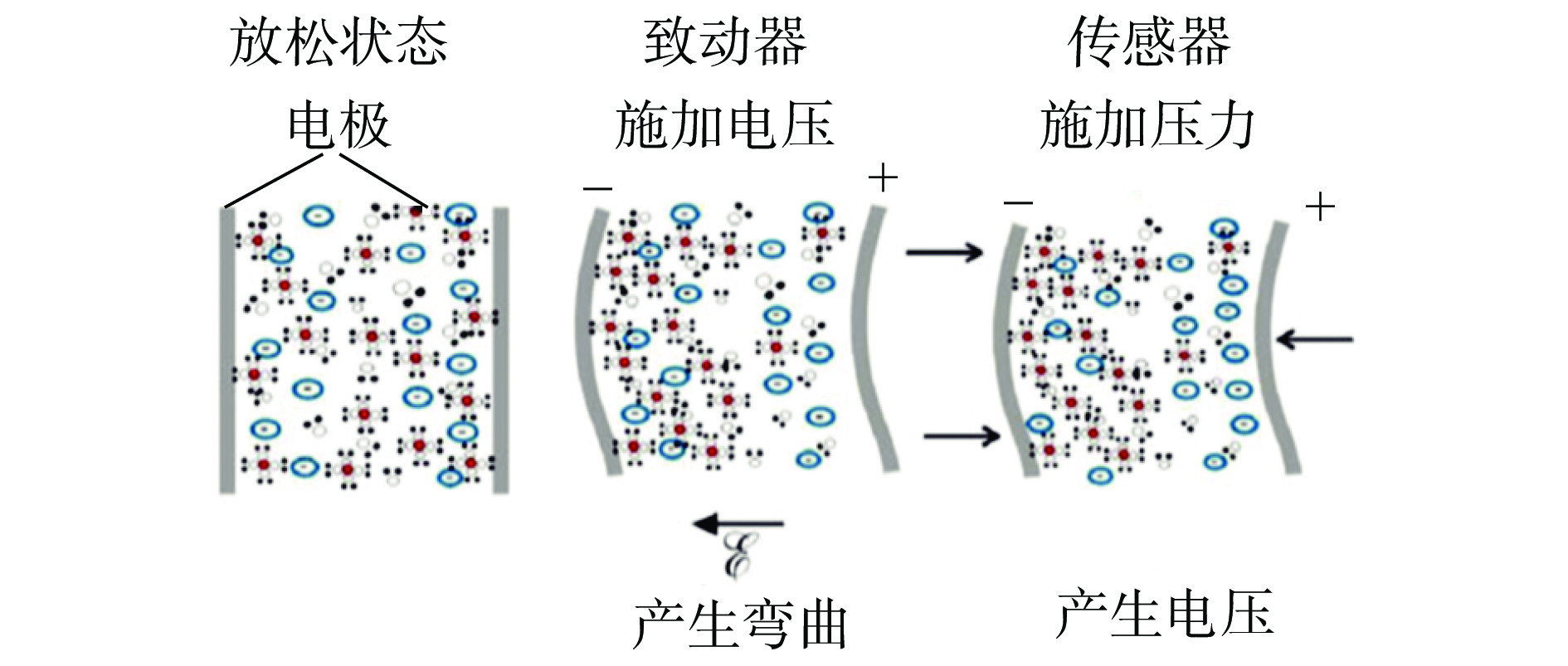
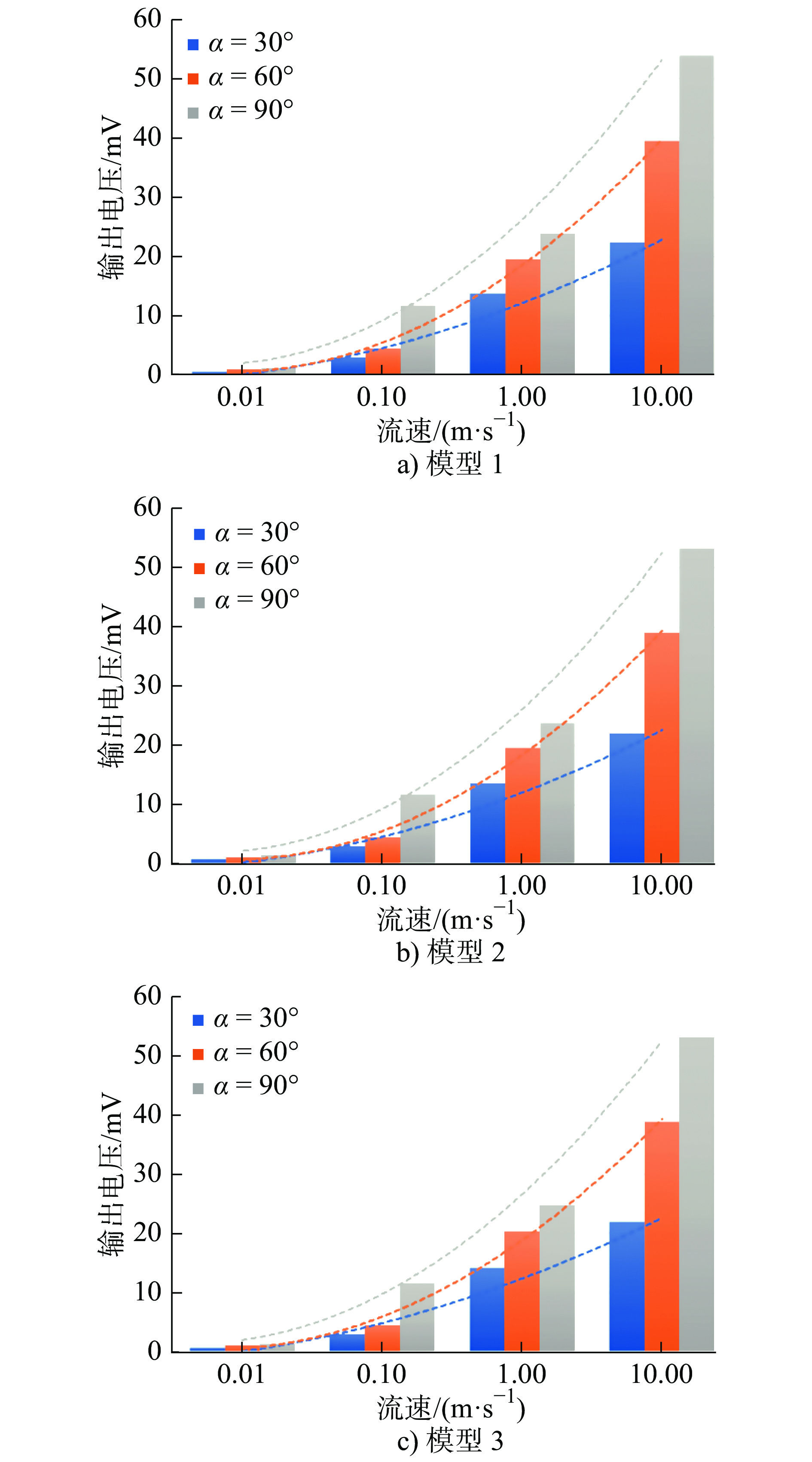
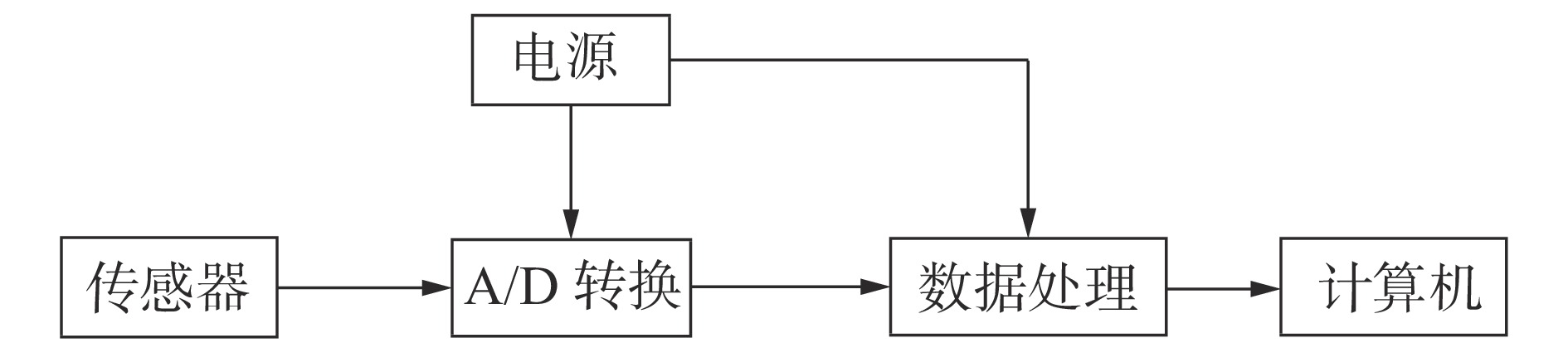
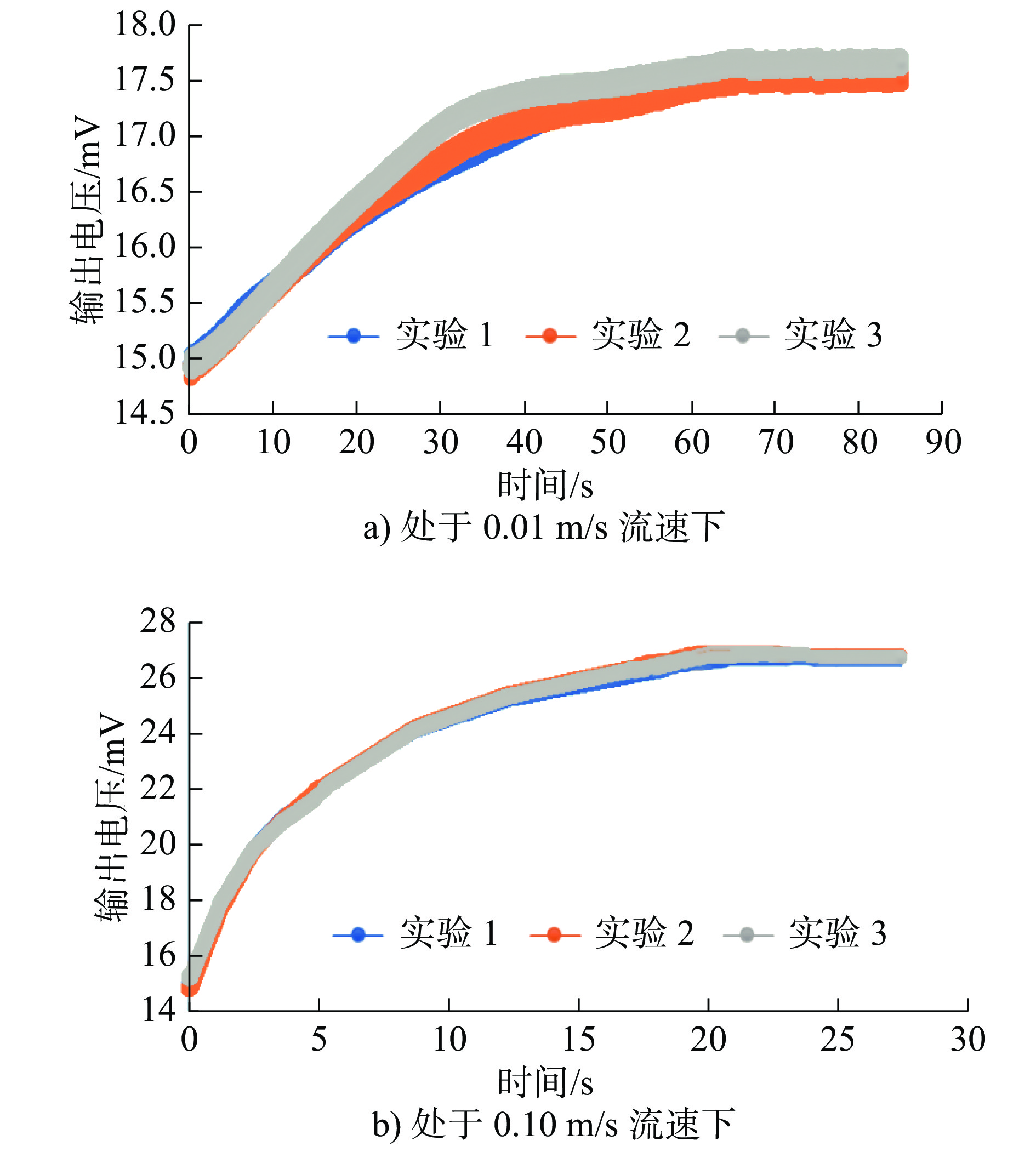
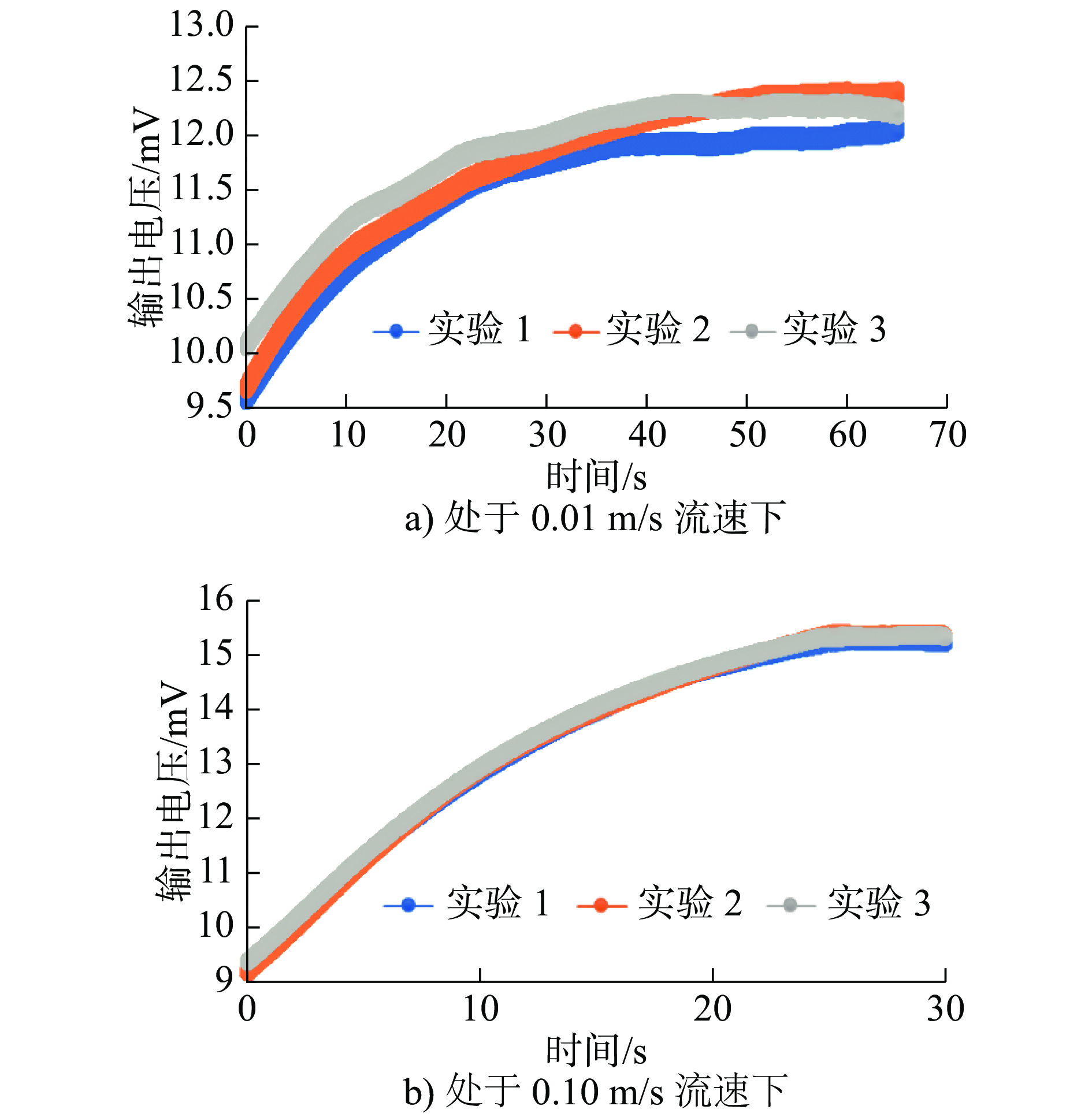
离子聚合物金属复合材料IPMC(Ion-exchange polymer metal composite,IPMC)具有驱动和传感功能。本文利用IPMC的传感能力,设计了一种海流速度信息传感器,基于3种模型分别使用ANSYS和MATLAB软件对不同条件的情况进行仿真,并设计测试系统进行实验,分析验证了片状IPMC在均匀流速下的传感能力。研究结果表明:片状IPMC的初始稳定电压以及测量灵敏度均与材料面积正相关;随着流速的增大,IPMC达到稳定输出电压的时间缩短,且材料输出电压在达到稳定前与时间呈现二次多项式函数关系,函数最大值即为实验所测得的稳定输出电压;各组次实验的重复性良好。
离子聚合物金属复合材料IPMC(Ion-exchange polymer metal composite,IPMC)具有驱动和传感功能。本文利用IPMC的传感能力,设计了一种海流速度信息传感器,基于3种模型分别使用ANSYS和MATLAB软件对不同条件的情况进行仿真,并设计测试系统进行实验,分析验证了片状IPMC在均匀流速下的传感能力。研究结果表明:片状IPMC的初始稳定电压以及测量灵敏度均与材料面积正相关;随着流速的增大,IPMC达到稳定输出电压的时间缩短,且材料输出电压在达到稳定前与时间呈现二次多项式函数关系,函数最大值即为实验所测得的稳定输出电压;各组次实验的重复性良好。





2023, 42(3): 484-490.
doi: 10.13433/j.cnki.1003-8728.20200592
摘要:
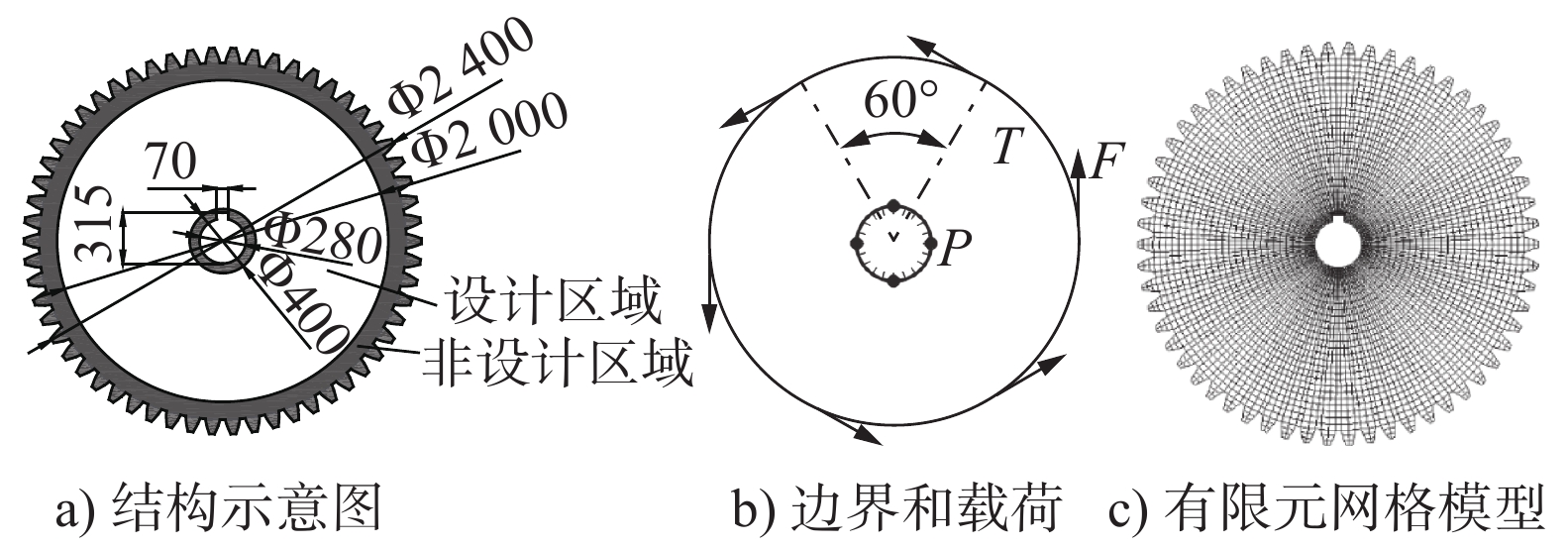
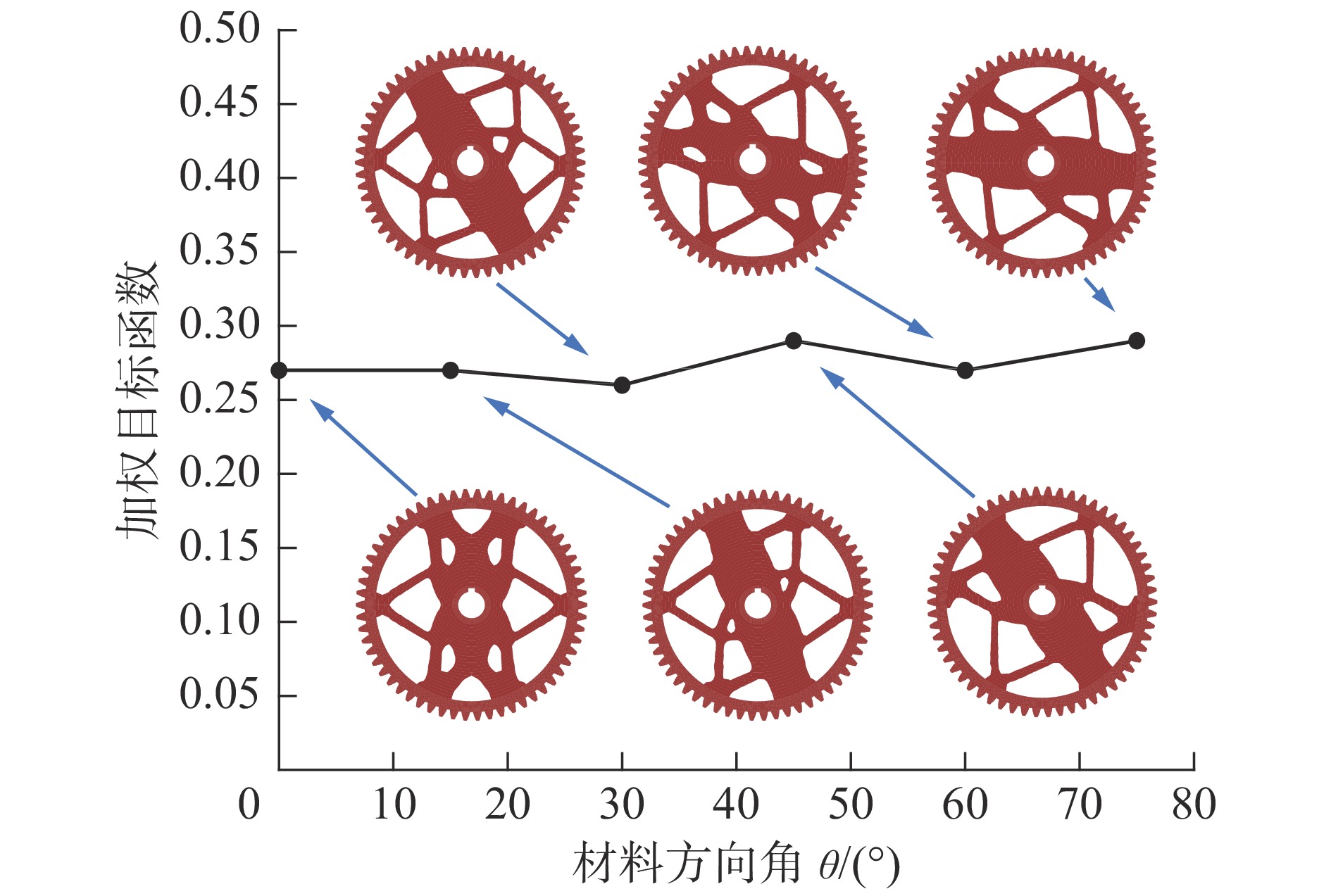
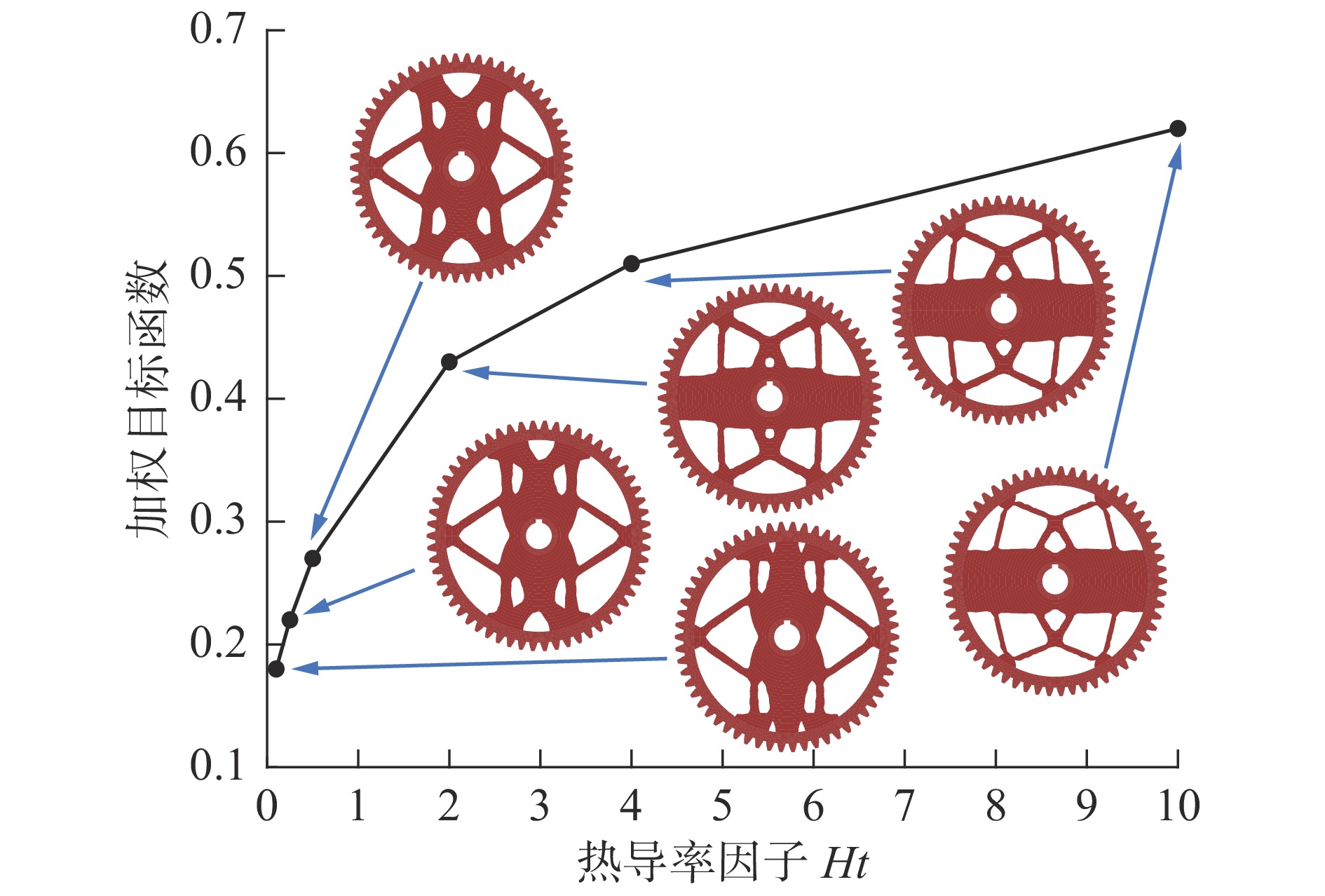
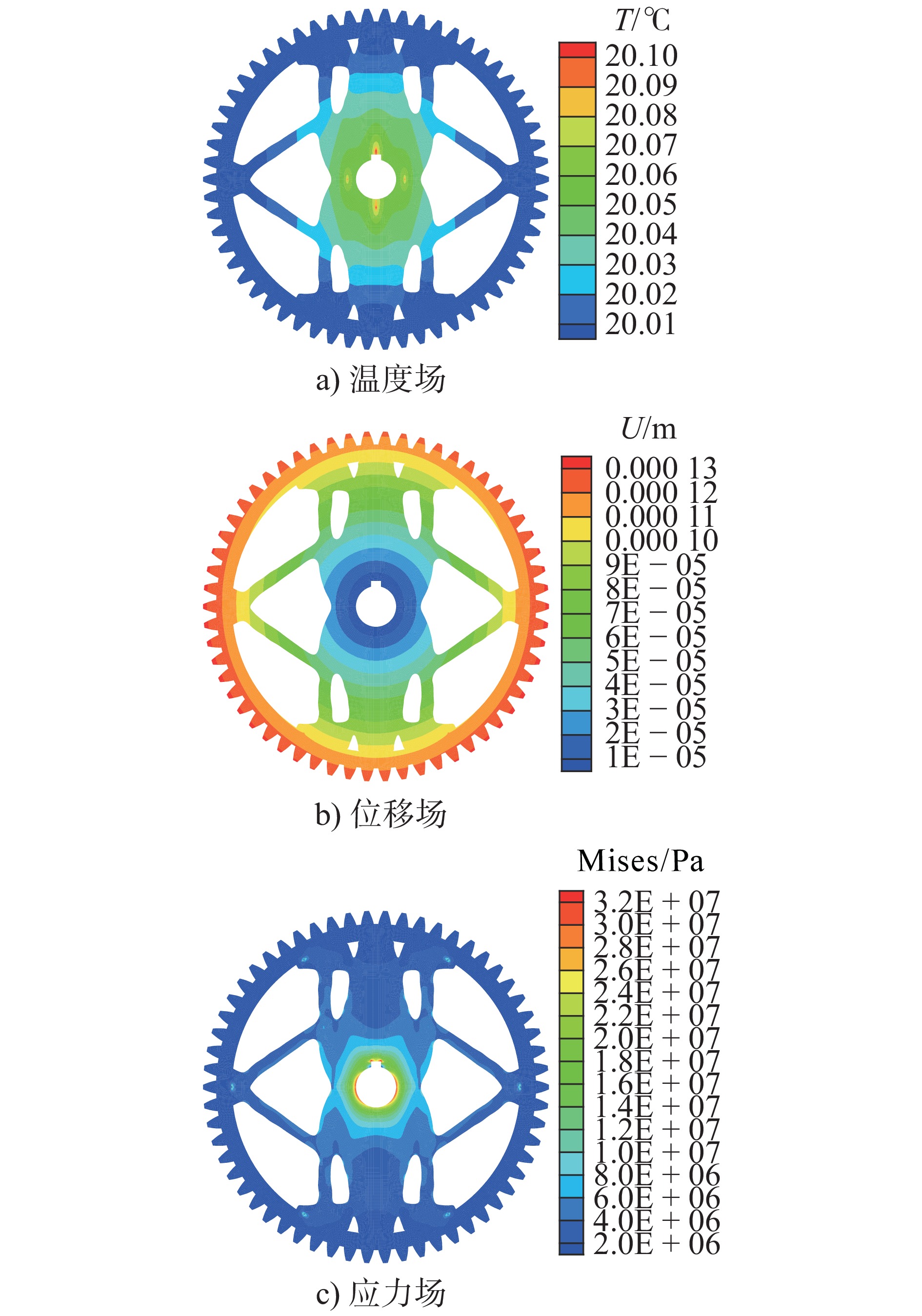
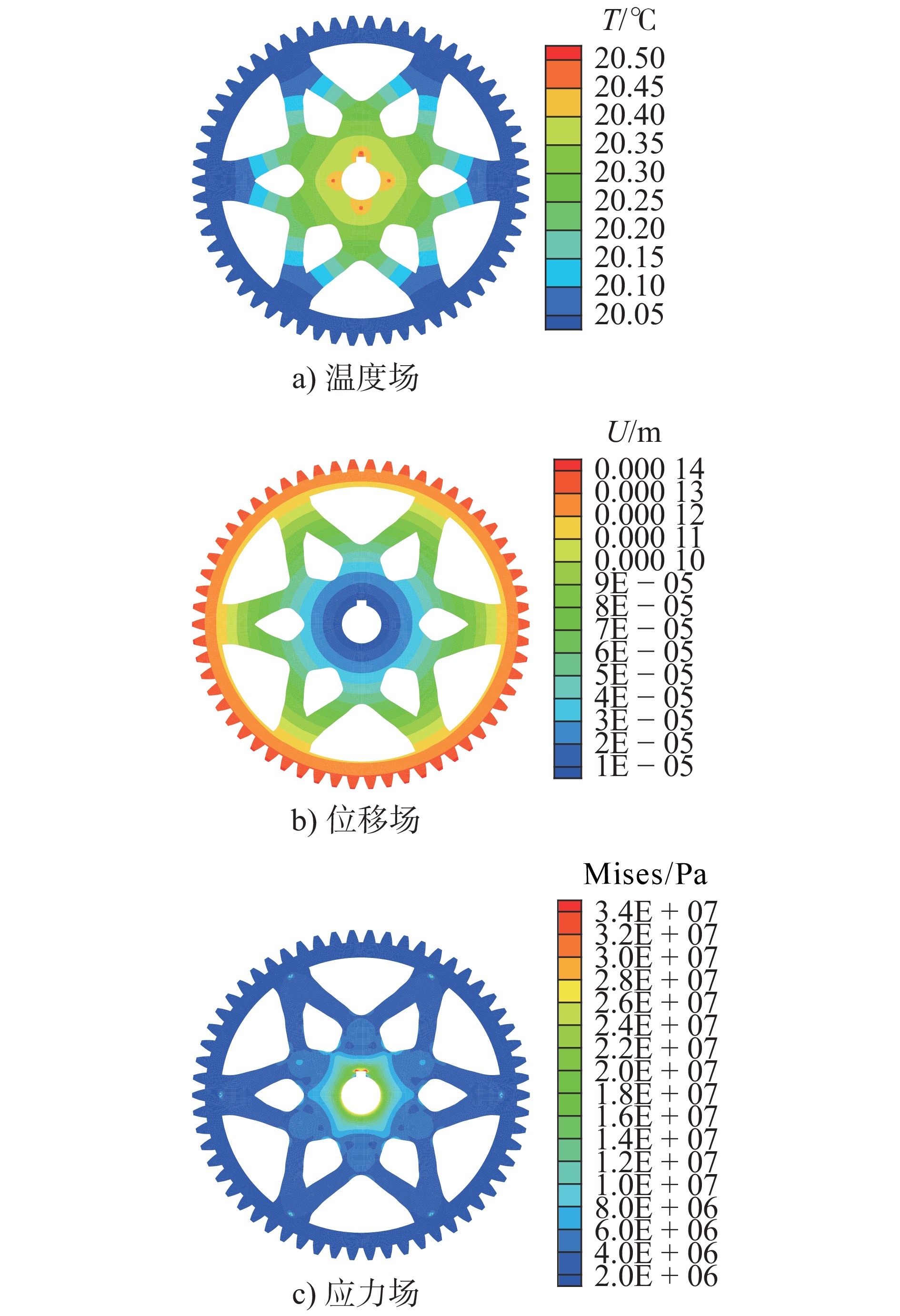
利用全局支撑径向基函数插值初始水平集函数,以水平集函数为设计变量,以结构柔度和散热弱度的加权函数为目标函数,基于参数化水平集法(Parameterized level set method,PLSM)建立了正交各向异性结构的热力耦合多目标拓扑优化模型。结合数值算例研究了权系数、材料方向角、泊松比因子和热导率因子对PLSM多目标最优拓扑结构和目标函数的影响,并给出了相关参数的合理取值范围;在3D打印实物的基础上完成了最优各向异性拓扑结构的性能分析,并与各向同性结构进行了对比讨论。结果表明,PLSM最优拓扑结构比变密度法的拓扑结构边界更光滑、清晰,不会出现中间密度和锯齿等现象;同时正交各向异性结构的温度场、位移场和应力场比各向同性结构均有较好地改善,加权目标函数、结构柔度和散热弱度分别降低了55%、3.18%和81.1%。
利用全局支撑径向基函数插值初始水平集函数,以水平集函数为设计变量,以结构柔度和散热弱度的加权函数为目标函数,基于参数化水平集法(Parameterized level set method,PLSM)建立了正交各向异性结构的热力耦合多目标拓扑优化模型。结合数值算例研究了权系数、材料方向角、泊松比因子和热导率因子对PLSM多目标最优拓扑结构和目标函数的影响,并给出了相关参数的合理取值范围;在3D打印实物的基础上完成了最优各向异性拓扑结构的性能分析,并与各向同性结构进行了对比讨论。结果表明,PLSM最优拓扑结构比变密度法的拓扑结构边界更光滑、清晰,不会出现中间密度和锯齿等现象;同时正交各向异性结构的温度场、位移场和应力场比各向同性结构均有较好地改善,加权目标函数、结构柔度和散热弱度分别降低了55%、3.18%和81.1%。