




Dynamic Modeling and Simulation of Spatial Robots Considering Dual Flexibility
-
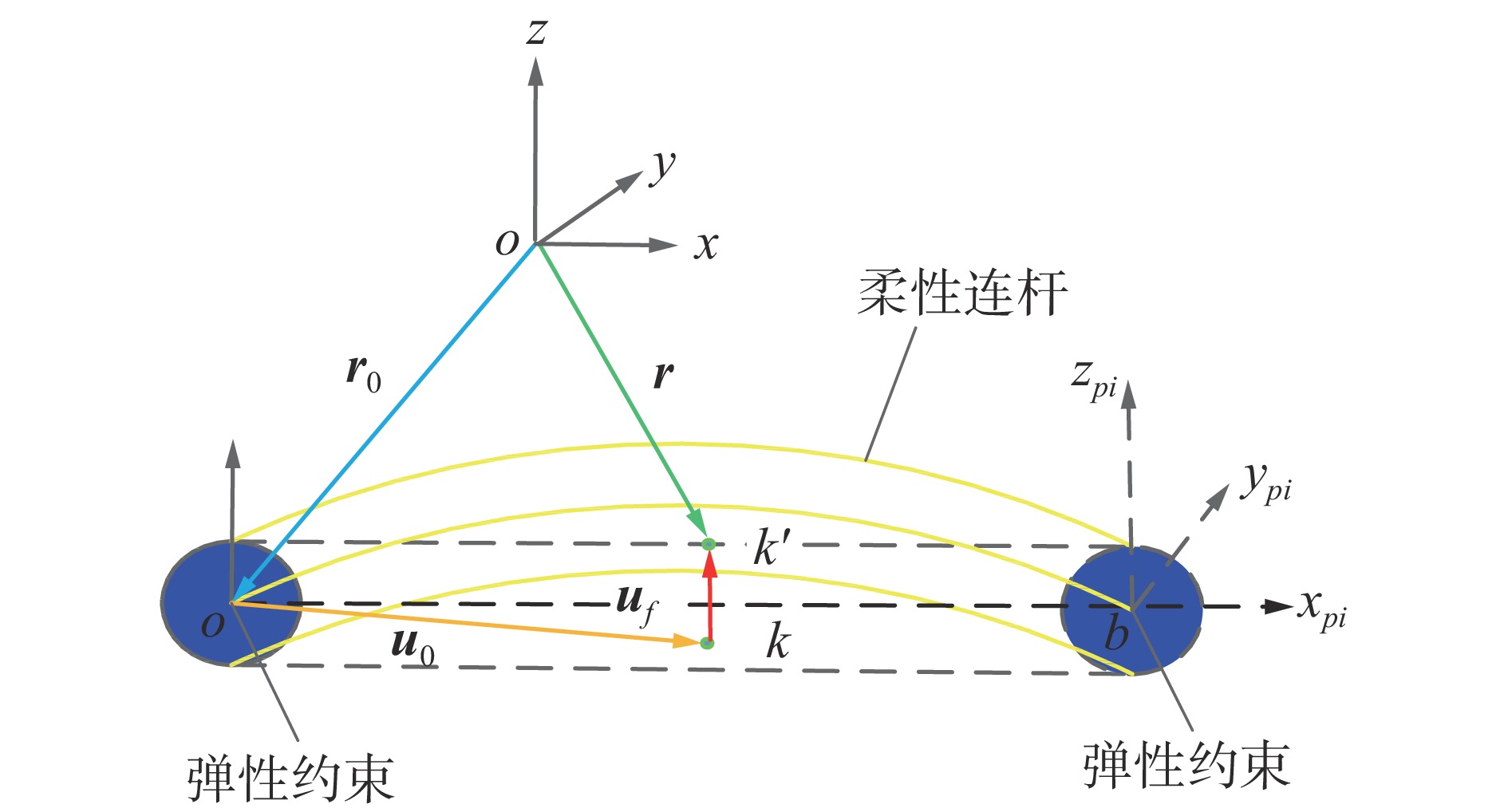
摘要: 以具有柔性关节和柔性构件的空间机器人作为研究对象,提出了一种双重柔性作用下的空间机器人动力学建模方法。首先,柔性关节简化为具有恒定刚度的线性扭转弹簧;其次,通过有限元法与浮动坐标系法相结合,描述含高阶模态信息的柔性空间构件位移场矢量。然后,将柔性关节和柔性空间构件简化为具有单向弹性约束的两个柔性构件和一个简支梁,再根据边界条件建立两者的约束方程。最后,根据协调矩阵建立含位移变化较小的末端执行器动力学模型。结果表明:新方法考虑了柔性关节和柔性空间构件之间的弹性影响,使得末端执行器运动轨迹在双重柔性变形抵消状态下,绝对变形量减小,轨迹精度提高。其中,z方向的偏差范围为0 ~ 0.31 mm,x方向的偏差范围为0 ~ 2.68 mm,y方向的偏差为0 ~ 3.02 mm。因此,所提出的构建双重柔性空间机器人的动力学方法正确,可为下一步控制策略及振动性能分析提供精确模型。Abstract: A dynamic modeling method for spatial robots with dual flexibility is proposed, taking spatial robots with flexible joints and links as the research object. Firstly, the flexible joint is simplified as a linear torsion spring with constant stiffness; Secondly, the displacement field vector of flexible spatial links containing higher-order modal information is described by combining the finite element method with the floating coordinate system method. Then, the flexible joints and spatial links are simplified as two flexible links with unidirectional elastic constraints and a simply supported beam, and the system constraint equation is established by combining the boundary conditions. Finally, a dynamic model of the end effector with small displacement changes is established based on the coordination matrix. The results indicate that the new method takes into account the elastic influence between the flexible joint and the flexible spatial link, resulting in a decrease in absolute deformation and an improvement trajectory accuracy of the end effector in a dual flexible deformation cancellation state. Among them, the deviation range in the z direction is 0 - 0.31 mm, the deviation range in the x direction is 0 - 2.68 mm, and the deviation in the y direction is 0 - 3.02 mm. Therefore, the proposed dynamic modeling method for dual flexible spatial robots is correct and can provide accurate models for system control and vibration analysis.
-
Key words:
- end effector /
- multiple flexibility /
- spatial robots /
- dynamic analysis
-
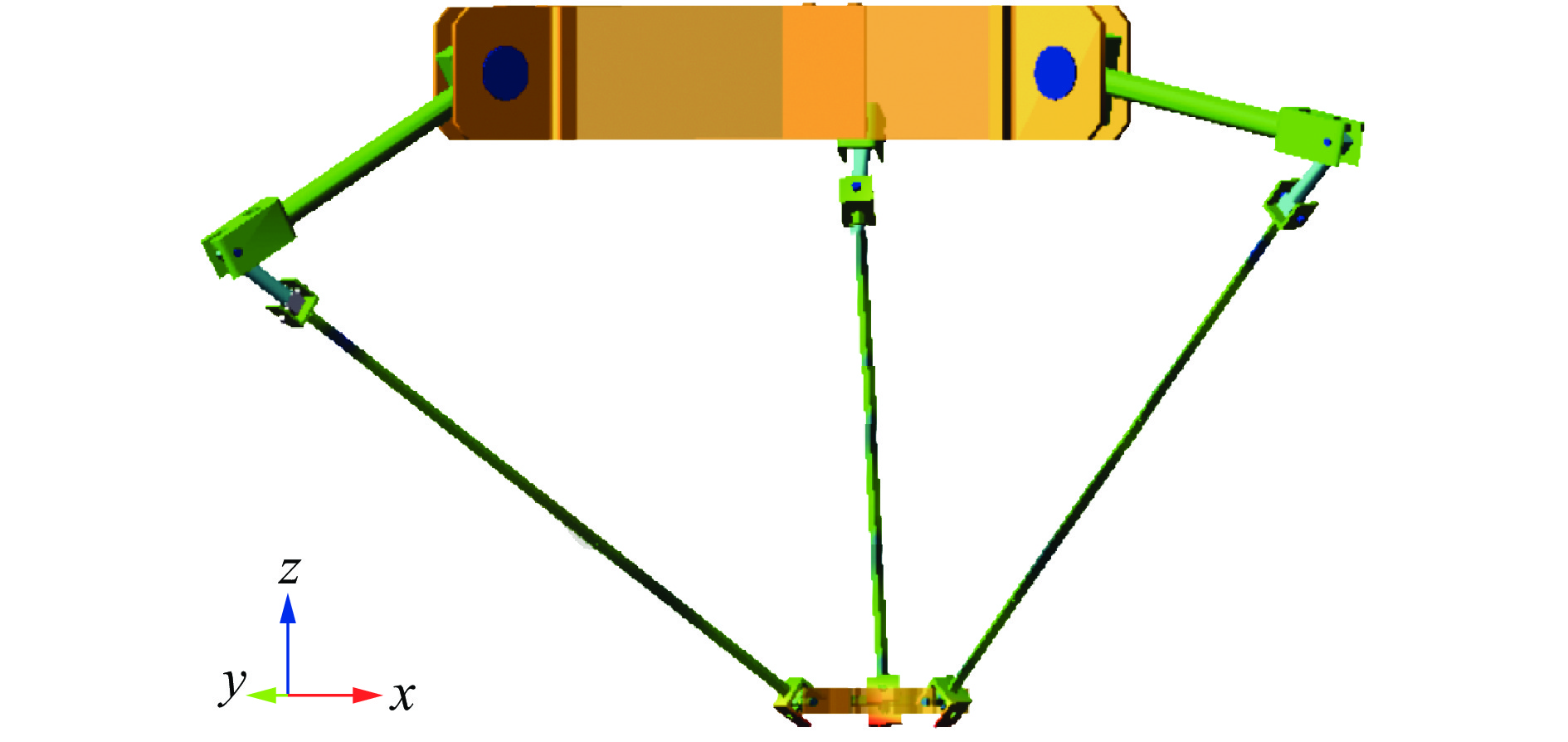
图 6 双重柔性空间机器人商品化仿真模型
Figure 6. Commercialization simulation model for dual flexible spatial robot
表 1 双重柔性空间机器人几何参数
Table 1. Geometric parameters of dual flexible spatial robot
参数 质量/kg 长度/m 密度/(kg·m−3) 泊松比 弹性模量/Pa 主动杆 2 0.4 7801 0.29 2.07 × 1011 中间杆 0.3 0.1 7801 0.29 2.07 × 1011 柔性连杆 1.5 0.8 2740 0.33 7.17 × 1010 末端执行器 2.6 0 7801 0.29 2.07 × 1011 柔性虎克铰 0.14 0.04 2740 0.33 7.17 × 1010  下载: 导出CSV
下载: 导出CSV
表 2 运动轨迹偏差
Table 2. Motion trajectory deviation
坐标轴 最大绝对偏差/mm 最大偏差/mm 本文数值模型 商品化仿真模型 x 96.230 93.550 2.680 y 84.100 87.120 3.020 z 0.701 0.390 0.311
下载: 导出CSV
表 3 柔性关节材料对系统固有频率的影响
Table 3. The influence of flexible joint materials on the natural frequency of the system
关节材料 10阶/Hz 11阶/Hz 12阶/Hz 铜 4.2368 × 10−4 9.3765 20.1237 铝合金 2.0576 × 10−4 14.9298 23.6968 钢 0.0126 17.4983 42.5228
下载: 导出CSV
-
[1] MARK C P, KAMATH S. Review of active space debris removal methods[J]. Space Policy, 2019, 47: 194-206. doi: 10.1016/j.spacepol.2018.12.005 [2] 胡忠华, 徐文福, 杨太玮, 等. 刚柔混合双臂空间机器人抓持-操作协同规划[J]. 宇航学报, 2022, 43(10): 1311-1321.HU Z H, XU W F, YANG T W, et al. Coordinated grasp and operation planning for hybrid rigid-flexible dual-arm space robot[J]. Journal of Astronautics, 2022, 43(10): 1311-1321. (in Chinese) [3] 张福礼, 袁朝辉. 基于递归Gibbs-Appell的柔性空间机器人建模与特性分析[J]. 航空动力学报, 2023, 38(10): 2545-2560.ZHANG F L, YUAN Z H. Flexible space robot modeling and characteristic analysis based on Recursive Gibbs-Appell[J]. Journal of Aerospace Power, 2023, 38(10): 2545-2560. (in Chinese) [4] KORAYEM M H, DEHKORDI S F, MEHRJOOEE O. Nonlinear analysis of open-chain flexible manipulator with time- dependent structure[J]. Advances in Space Research, 2022, 69(2): 1027-1049. doi: 10.1016/j.asr.2021.10.037 [5] 朱江凌. 双柔性关节-柔性臂空间在轨组装机器人动力学建模及控制[D]. 重庆: 重庆大学, 2021.ZHU J L. Dynamic modeling and control of the space on-orbit assembly robot with double flexible joints and arms[D]. Chongqing: Chongqing University, 2021. (in Chinese) [6] ZHANG Q Y, ZHAO X H, LIU L, et al. Dynamics analysis of spatial parallel robot with rigid and flexible links[J]. Mathematical Biosciences and Engineering, 2020, 17(6): 7101-7129. doi: 10.3934/mbe.2020365 [7] 葛东明, 罗文成, 邓润然, 等. 空间站系统柔性多体动力学建模与仿真[J]. 航天器工程, 2022, 31(4): 8-15.GE D M, LUO W C, DENG R R, et al. Flexible multi-body dynamics modeling and simulation for space station system[J]. Spacecraft Engineering, 2022, 31(4): 8-15. (in Chinese) [8] AGHAJARI M, DEHKORDI S F, KORAYEM M H. Nonlinear dynamic analysis of the extended telescopic joints manipulator with flexible links[J]. Arabian Journal for Science and Engineering, 2021, 46(8): 7909-7928. doi: 10.1007/s13369-020-05316-6 [9] 任军, 何文浩. 3-PSS柔性并联微操作机器人运动学及工作空间分析[J]. 机械设计与制造, 2022(12): 58-63.REN J, HE W H. Kinematics and workspace analysis of 3-PSS flexible parallel micromanipulator[J]. Machinery Design & Manufacture, 2022(12): 58-63. (in Chinese) [10] 于阳, 王学问, 徐振邦, 等. 基于柔性铰链的大口径望远镜并联调整机构[J]. 光学 精密工程, 2023, 31(3): 352-362. doi: 10.37188/OPE.20233103.0352YU Y, WANG X W, XU Z B, et al. Parallel adjustment mechanism for large aperture telescope based on flexible hinges[J]. Optics and Precision Engineering, 2023, 31(3): 352-362. (in Chinese) doi: 10.37188/OPE.20233103.0352 [11] PAN H, CHEN G L, KANG Y Z, et al. Design and kinematic analysis of a flexible-link parallel mechanism with a spatially quasi-translational end effector[J]. Journal of Mechanisms and Robotics, 2021, 13(1): 011022. doi: 10.1115/1.4048754 [12] 张青云, 赵新华, 刘凉, 等. 刚柔耦合空间闭链机器人轨迹跟踪与振动抑制研究[J]. 农业机械学报, 2021, 52(2): 401-407.ZHANG Q Y, ZHAO X H, LIU L, et al. Trajectory tracking and vibration suppression of rigid-flexible coupling spatial closed-chain robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(2): 401-407. (in Chinese) [13] BAI Z F, JIANG X, LI J Y, et al. Dynamic analysis of mechanical system considering radial and axial clearances in 3D revolute clearance joints[J]. Journal of Vibration and Control, 2021, 27(15-16): 1893-1909. doi: 10.1177/1077546320950517 [14] 张明, 房立金, 孙凤, 等. 变刚度柔性机器人关节的设计与解耦控制方法[J]. 电机与控制学报, 2019, 23(7): 120-128.ZHANG M, FANG L J, SUN F, et al. Design and decoupling control of variable-stiffness flexible robot joint[J]. Electric Machines and Control, 2019, 23(7): 120-128. (in Chinese) [15] DATOUO R, AHANDA J J B M, MELINGUI A, et al. Adaptive fuzzy finite-time command-filtered backstepping control of flexible-joint robots[J]. Robotica, 2021, 39(6): 1081-1100. doi: 10.1017/S0263574720000910 [16] CHEN X L, SUN C H. Dynamic modeling of spatial parallel mechanism with multi-spherical joint clearances[J]. International Journal of Advanced Robotic Systems, 2019, 16(5): 1729881419875910. [17] ZHENG K M, HU Y M, YU W Y. A novel parallel recursive dynamics modeling method for robot with flexible bar-groups[J]. Applied Mathematical Modelling, 2020, 77: 267-288. doi: 10.1016/j.apm.2019.07.038 [18] LI Y B, WANG Z S, CHEN C Q, et al. Dynamic accuracy analysis of a 5PSS/UPU parallel mechanism based on rigid-flexible coupled modeling[J]. Chinese Journal of Mechanical Engineering, 2022, 35(1): 33. doi: 10.1186/s10033-022-00693-5 [19] SPONG M W. Modeling and control of elastic joint robots[J]. Journal of Dynamic Systems, Measurement, and Control, 1987, 109(4): 310-318. doi: 10.1115/1.3143860 [20] CHEN G M, HOWELL L L. Two general solutions of torsional compliance for variable rectangular cross-section hinges in compliant mechanisms[J]. Precision Engineering, 2009, 33(3): 268-274. doi: 10.1016/j.precisioneng.2008.08.001 [21] 应玲君, 赵荣珍, 马德福, 等. 基于动态等效刚度的平面柔性铰链建模与分析[J]. 振动与冲击, 2019, 38(3): 222-228.YING L J, ZHAO R Z, MA D F, et al. Modeling and analysis for planar flexible hinges based on dynamic equivalent stiffness[J]. Journal of Vibration and Shock, 2019, 38(3): 222-228. (in Chinese) [22] ZHANG Q Y, ZHAO X H, LIU L, et al. Adaptive sliding mode neural network control and flexible vibration suppression of a flexible spatial parallel robot[J]. Electronics, 2021, 10(2): 212. doi: 10.3390/electronics10020212 [23] 黄真, 孔令富, 方跃法. 并联机器人机构学理论及控制[M]. 北京: 机械工业出版社, 1997.HUANG Z, KONG L F, FANG Y F. Mechanism theory and control of parallel robot[M]. Beijing: China Machine Press, 1997. (in Chinese) -







 点击查看大图
点击查看大图
计量
- 文章访问数: 41
- HTML全文浏览量: 15
- PDF下载量: 1
- 被引次数: 0
