




Research on Over-horizon Preview Control Strategy of a New Type of Continuous Damping Adjustable Suspension System
-
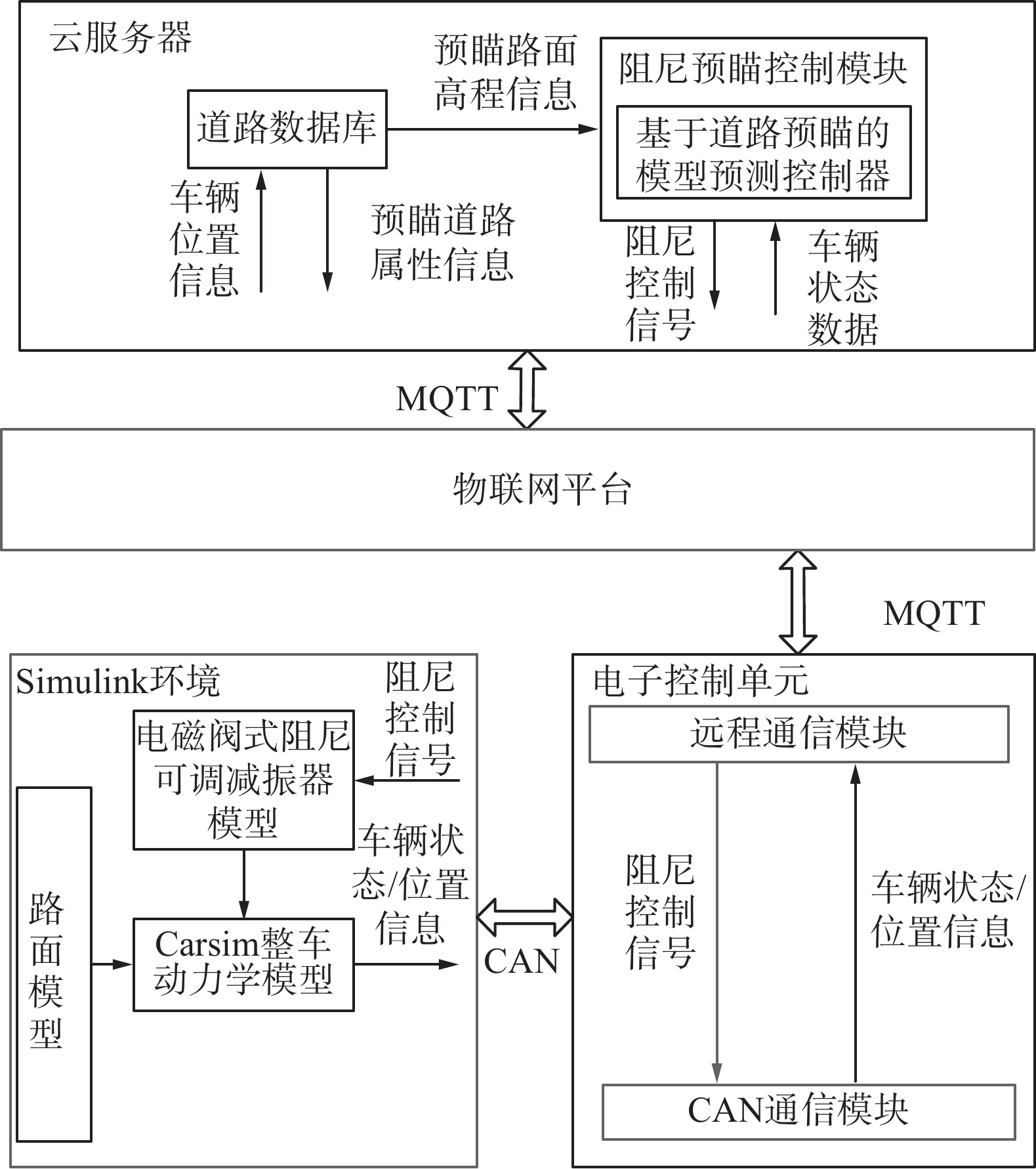
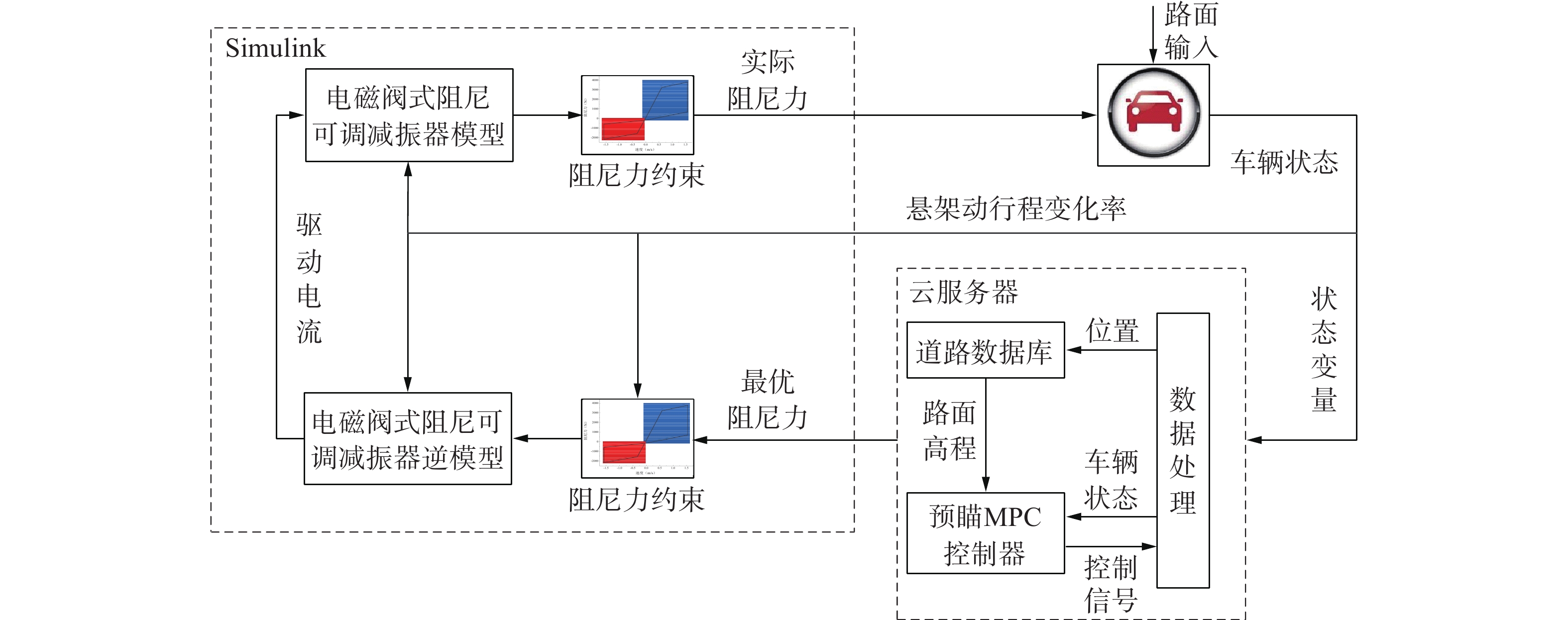
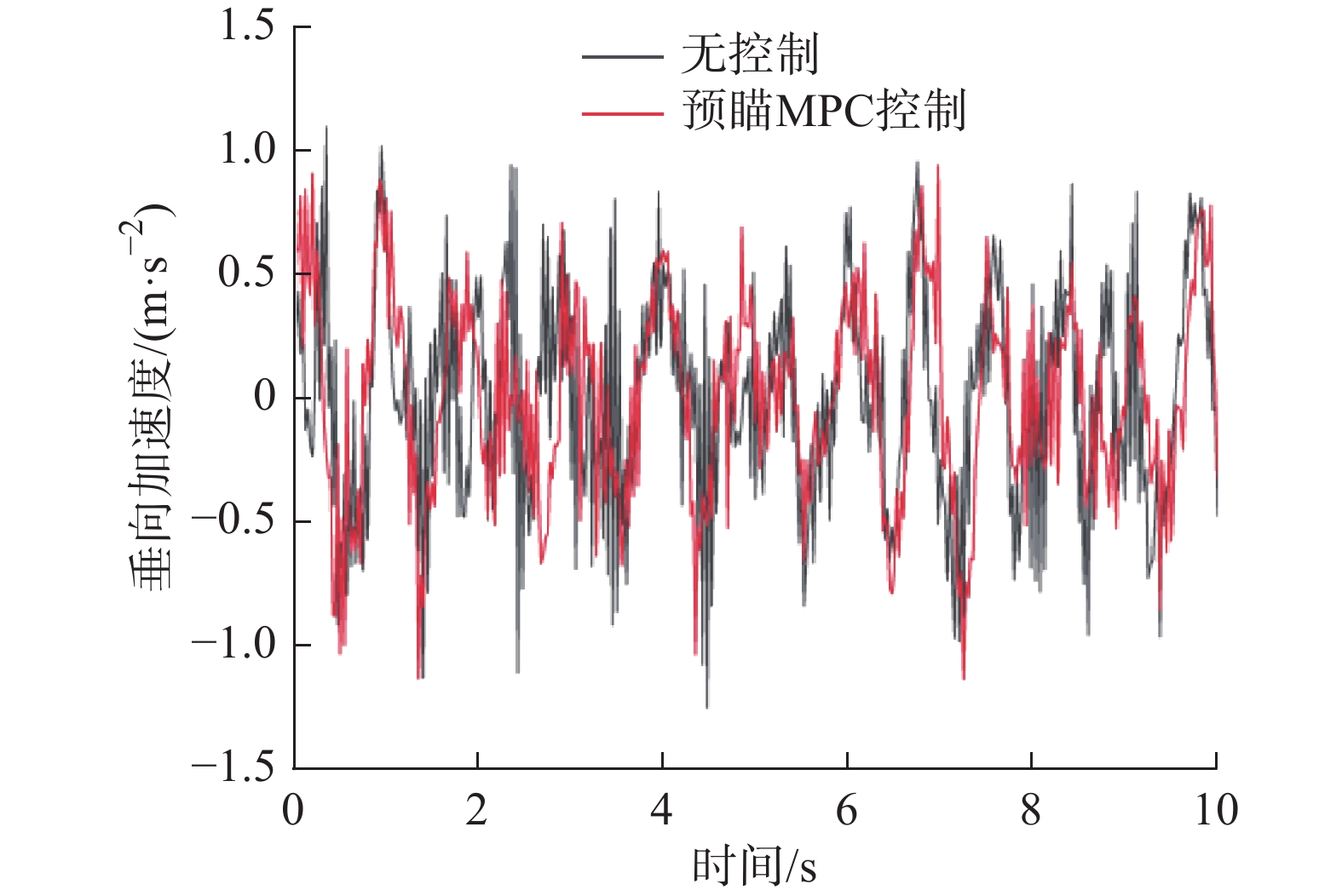
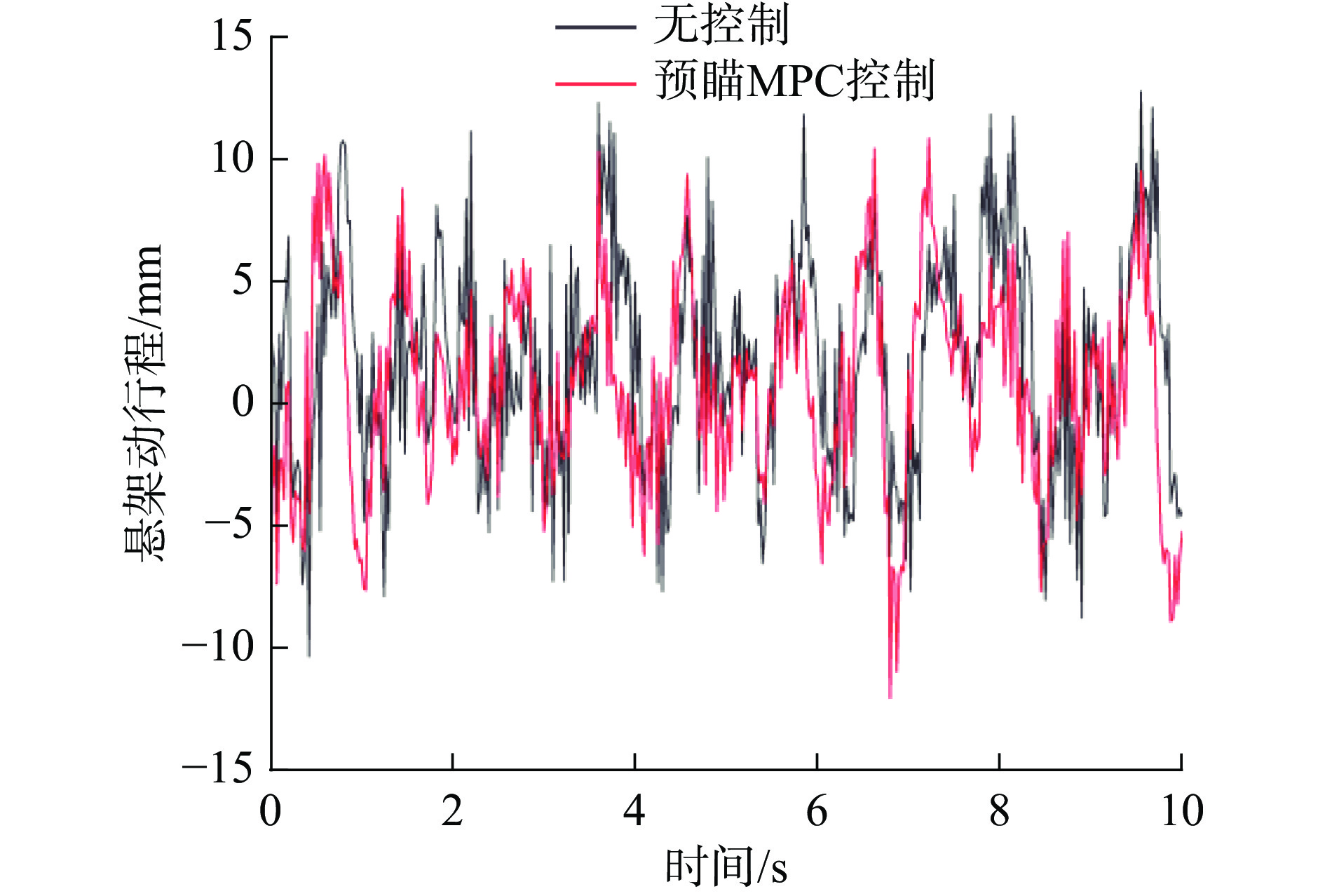
摘要: 针对连续阻尼可调悬架系统中存在的典型时滞问题,本文提出一种基于云平台的超视距预瞄控制策略。首先,利用MATLAB/Simulink构建七自由度连续阻尼可调悬架系统整车动力学模型;然后利用云服务器搭建超视距预瞄控制策略运行平台,并基于消息队列遥测传输(Message queuing telemetry transport, MQTT)协议将车载控制单元与云服务器接入物联网平台,实现云端控制策略与车载控制单元的数据通讯;最后利用CarSim-Simulink联合仿真模型及车载控制单元进行硬件在环试验。结果表明,所提出的控制策略不仅能改善悬架系统的平顺性,而且将预瞄控制策略部署于云端的方式可有效降低车载电子控制单元负荷。
-
关键词:
- 新型连续阻尼可调悬架系统 /
- 超视距预瞄控制 /
- 云平台 /
- 消息队列遥测传输协议 /
- 硬件在环
Abstract: Aiming at the typical time delay problem in the continuous damping adjustable suspension system, a cloud-based over-the-horizon preview control strategy is proposed in this paper. First, MATLAB/Simulink is used to build the vehicle dynamics model of the 7 DOF continuous damping suspension system; then, the cloud server is used to build the over-the-horizon preview control strategy operation platform, and the MQTT (Message queuing telemetry transport) is used to connect the vehicle control unit and the cloud server to the IoT platform to realize the data communication between the cloud control strategy and the vehicle control unit. Finally, the Carsim-Simulink co-simulation model and the vehicle control unit are used to conduct hardware-in-the-loop tests. The results show that the proposed control strategy can not only improve the ride comfort of the suspension system, but also can effectively reduce the load of the vehicle electronic control unit by deploying the preview control strategy in the cloud. -
表 1 模糊控制规则表
Table 1. Fuzzy control rule table
e1 e2 NB NS ZE PS PB NB NB NM NS ZE ZE NS NM NS ZE ZE PS ZE NS ZE ZE ZE PS PS NS ZE PS PM PM PB ZE PS PS PM PB  下载: 导出CSV
下载: 导出CSV
表 2 新型连续阻尼可调悬架系统性能评价指标
Table 2. Performance evaluation index of a new continuous damping adjustable suspension system
评价指标 无控制 MPC
控制控制效果
提升垂向加速度峰值 −1.231 −1.130 8.2% 垂向加速度均方根值 0.446 0.404 9.4% 侧倾角加速度峰值 −1.435 −1.361 5.1% 侧倾角加速度均方根值 0.498 0.433 13% 俯仰角加速度峰值 −1.866 1.702 8.7% 俯仰角加速度均方根值 0.635 0.569 10.3% 左后车轮悬架动行程峰值 0.0129 −0.0121 6.2% 左后车轮悬架动行程均方根值 0.0047 0.0041 12.7% 右后车轮动载荷峰值 −1790.43 −1503.98 15.9% 右后车轮动载荷均方根值 626.87 533.38 14.9%
下载: 导出CSV
-
[1] 来飞, 胡博. 汽车主动悬架技术的研究现状[J]. 南京理工大学学报, 2019, 43(4): 518-526. doi: 10.14177/j.cnki.32-1397n.2019.43.04.020LAI F, HU B. Research status of automotive active suspension technology[J]. Journal of Nanjing University of Science and Technology, 2019, 43(4): 518-526. (in Chinese) doi: 10.14177/j.cnki.32-1397n.2019.43.04.020 [2] LI P S, LAM J, CHEUNG K C. Multi-objective control for active vehicle suspension with wheelbase preview[J]. Journal of Sound and Vibration, 2014, 333(21): 5269-5282. doi: 10.1016/j.jsv.2014.06.017 [3] GÖHRLE C, WAGNER A, SCHINDLER A, et al. Active suspension controller using MPC based on a full-car model with preview information[C]//2012 American Control Conference (ACC). Montreal: IEEE, 2012: 497-502. [4] THEUNISSEN J, SORNIOTTI A, GRUBER P, et al. Regionless explicit model predictive control of active suspension systems with preview[J]. IEEE Transactions on Industrial Electronics, 2020, 67(6): 4877-4888. doi: 10.1109/TIE.2019.2926056 [5] LI Z J, KOLMANOVSKY I, ATKINS E, et al. Cloud aided semi-active suspension control[C]//2014 IEEE Symposium on Computational Intelligence in Vehicles and Transportation Systems (CIVTS). Orlando: IEEE, 2014: 76-83. [6] LI Z J, KOLMANOVSKY I, ATKINS E, et al. H∞ filtering for cloud-aided semi-active suspension with delayed road information[J]. IFAC-PapersOnLine, 2015, 48(12): 275-280. doi: 10.1016/j.ifacol.2015.09.390 [7] MIHÁLY A, KISARI Á, GÁSPÁR P, et al. Adaptive semi-active suspension design considering cloud-based road information[J]. IFAC-PapersOnLine, 2019, 52(5): 249-254. doi: 10.1016/j.ifacol.2019.09.040 [8] MIHÁLY A, KISARI Á, GÁSPÁR P, et al. Design of adaptive vehicle suspension using cloud-based road data[C]//2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM). Munich: IEEE, 2017: 529-534. [9] BASARGAN H, MIHÁLY A, KISARI Á, et al. Vehicle semi-active suspension control with cloud-based road information[J]. Periodica Polytechnica Transportation Engineering, 2021, 49(3): 242-249. doi: 10.3311/PPtr.18593 [10] 李克强, 常雪阳, 李家文, 等. 智能网联汽车云控系统及其实现[J]. 汽车工程, 2020, 42(12): 1595-1605. doi: 10.19562/j.chinasae.qcgc.2020.12.001LI K Q, CHANG X Y, LI J W, et al. Cloud control system for intelligent and connected vehicles and its application[J]. Automotive Engineering, 2020, 42(12): 1595-1605. (in Chinese) doi: 10.19562/j.chinasae.qcgc.2020.12.001 [11] 张洪昌, 郭军, 赵伟, 等. 超视界路况下网联汽车的辅助驾驶方法[J]. 中国机械工程, 2020, 31(14): 1666-1671. doi: 10.3969/j.issn.1004-132X.2020.14.004ZHANG H C, GUO J, ZHAO W, et al. Assisted driving method of network-connected vehicle in out-of-sight roads[J]. China Mechanical Engineering, 2020, 31(14): 1666-1671. (in Chinese) doi: 10.3969/j.issn.1004-132X.2020.14.004 [12] 张立军, 张天侠. 车辆四轮相关路面非平稳随机输入通用时频模型[J]. 振动与冲击, 2008, 27(7): 75-78. doi: 10.3969/j.issn.1000-3835.2008.07.017ZHANG L J, ZHANG T X. General nonstationary random input model of road surface with four wheels correlated[J]. Journal of Vibration and Shock, 2008, 27(7): 75-78. (in Chinese) doi: 10.3969/j.issn.1000-3835.2008.07.017 [13] 郭翠娟, 暴宁, 荣锋. 基于MQTT的物联网平台研究与设计[J]. 计算机工程与设计, 2022, 43(8): 2378-2384. doi: 10.16208/j.issn1000-7024.2022.08.036GUO C J, BAO N, RONG F. Research and design of internet of things platform based on MQTT[J]. Computer Engineering and Design, 2022, 43(8): 2378-2384. (in Chinese) doi: 10.16208/j.issn1000-7024.2022.08.036 [14] 陈文艺, 梁宁宁, 杨辉. 基于MQTT的物联网网关双向通信系统设计[J]. 传感器与微系统, 2022, 41(8): 100-103. doi: 10.13873/J.1000-9787(2022)08-0100-04CHEN W Y, LIANG N N, YANG H. Design of two-way communication system of IoT gateway based on MQTT[J]. Transducer and Microsystem Technologies, 2022, 41(8): 100-103. (in Chinese) doi: 10.13873/J.1000-9787(2022)08-0100-04 [15] 张亮修, 王宇, 吴光强, 等. 汽车阻尼可调半主动悬架混杂模型预测控制[J]. 西安交通大学学报, 2017, 51(11): 156-164. doi: 10.7652/xjtuxb201711022ZHANG L X, WANG Y, WU G Q, et al. Hybrid model predictive control of semi-active suspension with variable damping shock absorber[J]. Journal of Xi'an Jiaotong University, 2017, 51(11): 156-164. (in Chinese) doi: 10.7652/xjtuxb201711022 [16] 范健文, 高远, 蓝会立, 等. 汽车非线性悬架系统的最优模糊复合控制策略研究[J]. 机械设计与制造, 2014(4): 85-88. doi: 10.3969/j.issn.1001-3997.2014.04.027FAN J W, GAO Y, LAN H L, et al. Control of a nonlinear vehicle suspension using hybrid strategy of optimal controller and fuzzy controller[J]. Machinery Design & Manufacture, 2014(4): 85-88. (in Chinese) doi: 10.3969/j.issn.1001-3997.2014.04.027 [17] GÖHRLE C, SCHINDLER A, WAGNER A, et al. Model predictive control of semi-active and active suspension systems with available road preview[C]//2013 European Control Conference (ECC). Zurich: IEEE, 2013: 1499-1504. -





 点击查看大图
点击查看大图

图(9) / 表(2)
计量
- 文章访问数: 123
- HTML全文浏览量: 71
- PDF下载量: 15
- 被引次数: 0
