




Flexible Grasp Control of Manipulator Pneumatic Joint
-
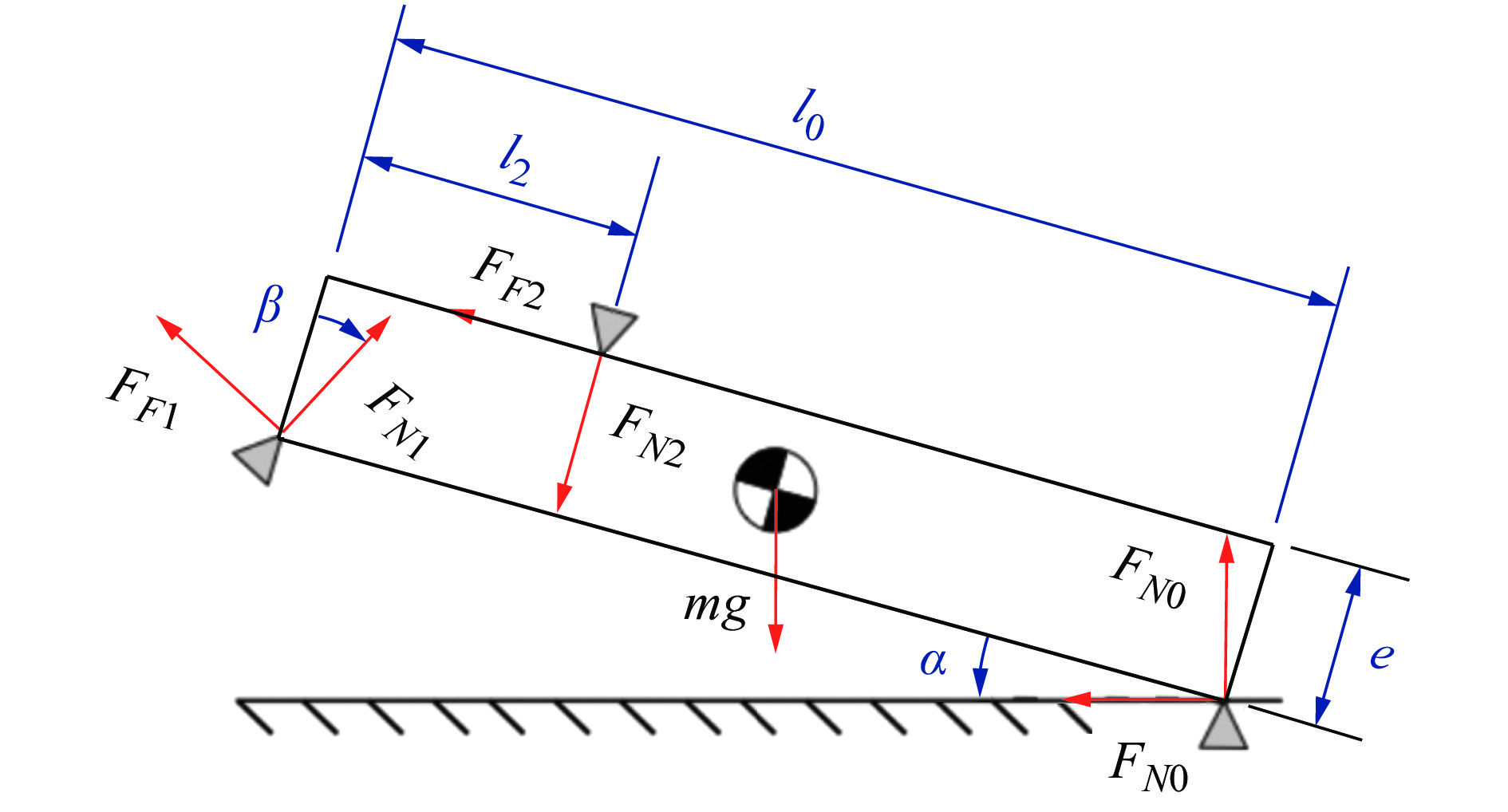
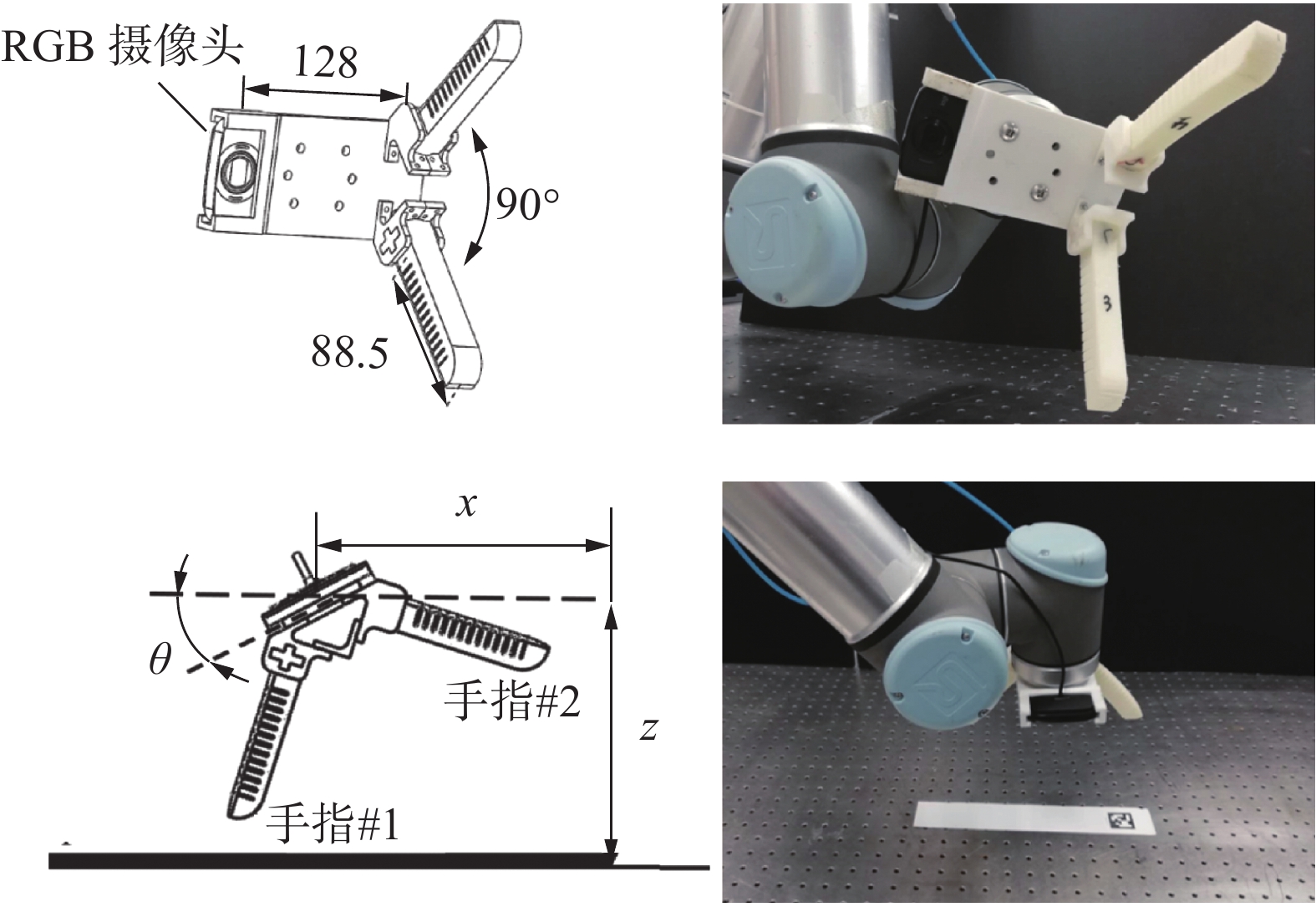
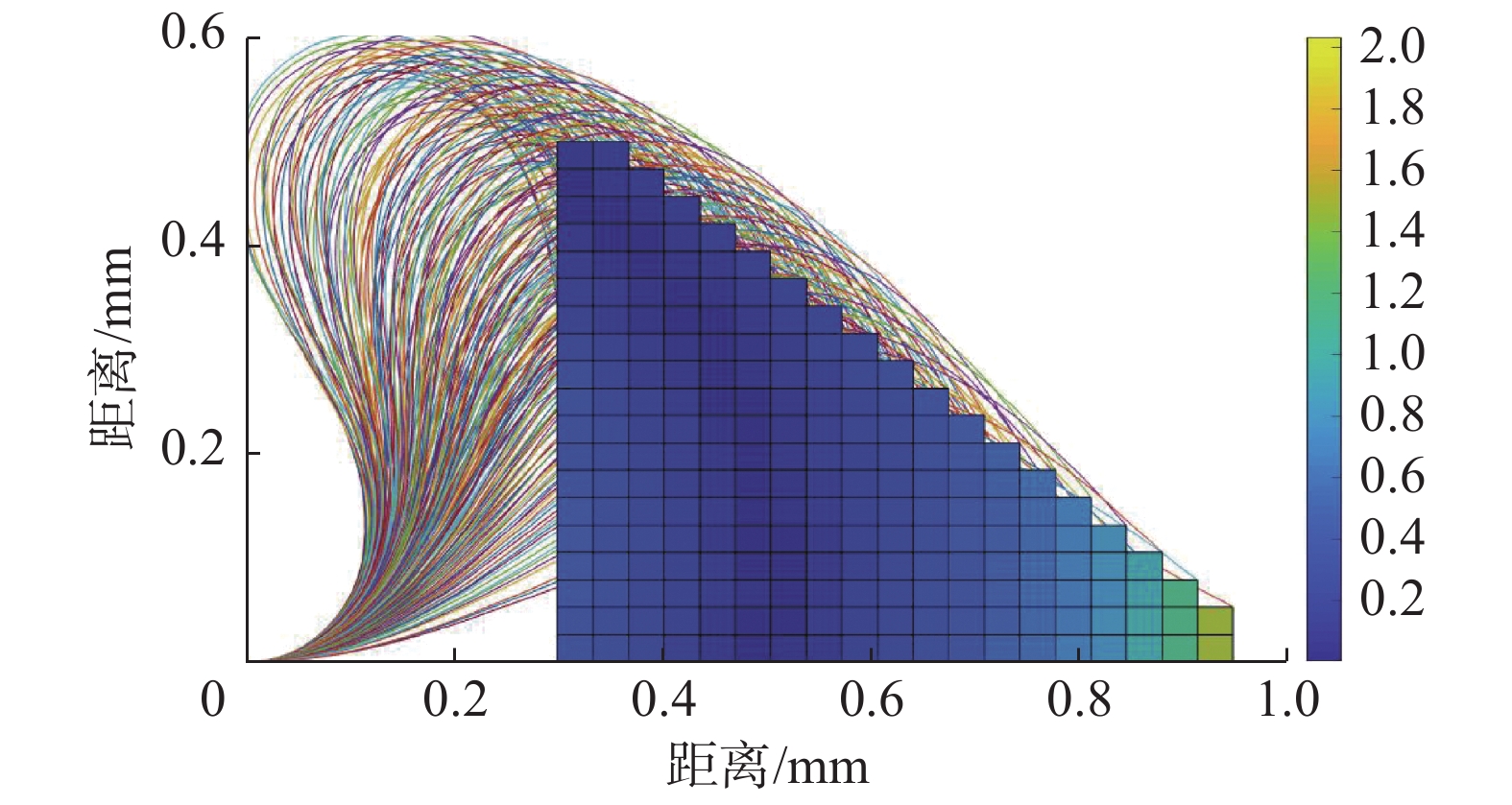
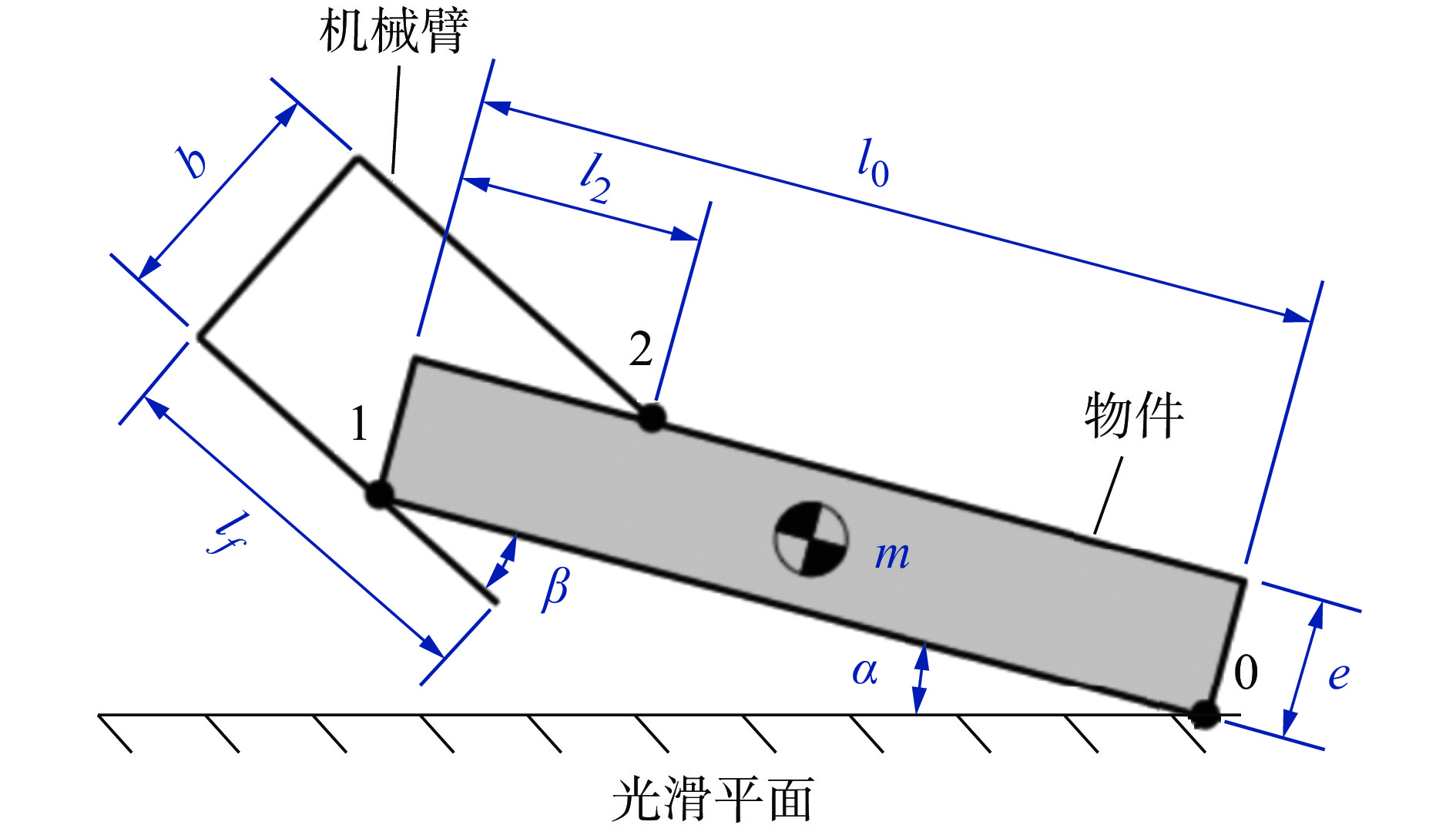
摘要: 针对机械臂不便于从物件上方直接进行抓取的情况,提出一种机械臂气动关节柔性抓取操控技术。分析机械臂常规抓取方式,剖析机械臂与物件接触间的几何约束关系,开展物件一边被抬起的受力情况。在此基础上,分析气动关节曲率和内压之间的线性关系,构建控制关节内压的机械臂柔性抓取操控技术。通过实物测试验证,采集物件曲率变化所对应手指内压变化情况,获取不同曲率下抓握平衡所需摩擦系数变化情况,通过手指和地面“相互对抗”,使纸条曲率变大且重心右移,从而成功实现了机械臂柔性抓取柔软物件,达到设计目标要求。Abstract: Aiming at the situation that the manipulator is not convenient to grasp directly from the upper part of the object, a flexible grasp control technology of the pneumatic joint of the manipulator is proposed. The conventional grasp mode of the manipulator is analyzed, the geometric constraint relationship between the manipulator and the object is analyzed, and the force condition of the object is carried out when one side is lifted. On this basis, the linear relationship between the curvature of the pneumatic joint and the internal pressure was analyzed, and the flexible grasp control technology of the manipulator to control the internal pressure of the joint was constructed. Through the actual test validation, collect objects curvature change corresponding fingers, the change of the internal pressure, the required to grasp balance under different curvature change of the coefficient of friction, and ground against each other through the fingers, make note of curvature change and the focus moves to the right so as to successfully implement the flexible mechanical arm grasp soft objects, to meet the design goals and objectives.
-
Key words:
- mechanical arm /
- flexible grasping /
- pneumatic joint /
- data collection
-
表 1 机械臂与薄物件接触几何约束
参数 定义描述 $ \beta $ 机械臂与物件之间的夹角 $ {l_2} $ 接触点2与物件边角之间的距离 $ e $ 物件的厚度 $ b $ 机械臂打开指间的距离 $ {l_0} $ 物件长度 $ m $ 物件质量 $ {\mu _0} $ 物件与平面之间的摩擦因数 $ {l_f} $ 机械臂指尖长度 $ {\mu _1} $、$ {\mu _2} $ 机械臂与物件间的摩擦因数  下载: 导出CSV
下载: 导出CSV
-
[1] 张潇, 张秋菊. 基于柔性腕手的最优抓取规划研究[J]. 工程设计学报, 2020, 27(3): 307-316ZHANG X, ZHANG Q J. Research on optimal grasping planning based on flexible wrist-hand[J]. Chinese Journal of Engineering Design, 2020, 27(3): 307-316 (in Chinese) [2] 张许有, 刘有余. 势能代价PRM算法的机械臂避障路径规划研究[J]. 机械科学与技术, 2022, 41(4): 552-558ZHANG X Y, LIU Y Y. Research on obstacle avoidance path planning of manipulators using potential energy cost PRM algorithm[J]. Mechanical Science and Technology for Aerospace Engineering, 2022, 41(4): 552-558 (in Chinese) [3] 张启航, 邵敏, 任树雄, 等. 一种仿象鼻气动连续体机器人的结构设计[J]. 机械科学与技术, 2022, 41(4): 493-499ZHANG Q H, SHAO M, REN S X, et al. Structural design of a pneumatic trunk-type continuum robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2022, 41(4): 493-499 (in Chinese) [4] 柘龙炫, 李少波, 张星星, 等. 基于RBF神经网络的六自由度机械臂轨迹优化[J]. 组合机床与自动化加工技术, 2021(6): 17-20ZHE L X, LI S B, ZHANG X X, et al. Trajectory optimization of six-degree-of-freedom manipulator based on RBF neural network[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2021(6): 17-20 (in Chinese) [5] 王明明, 罗建军, 余敏. 基于Clamped B样条的空间非合作目标抓捕策略研究[J]. 力学学报, 2021, 53(2): 524-538 doi: 10.6052/0459-1879-20-114WANG M M, LUO J J, YU M. An optimal grasp planner for space robots using clamped B-splie[J]. Chinese Journal of Theoretical and Applied Mechanics, 2021, 53(2): 524-538 (in Chinese) doi: 10.6052/0459-1879-20-114 [6] 陈友东, 刘嘉蕾, 胡澜晓. 一种基于高斯过程混合模型的机械臂抓取方法[J]. 机器人, 2019, 41(3): 343-352CHEN Y D, LIU J L, HU L X. A manipulator grasping method based on mixture of Gaussian processes model[J]. Robot, 2019, 41(3): 343-352 (in Chinese) [7] 王国栋, 徐尚超, 冯宁宁, 等. 真空吸盘型板料抓取装置吸盘布置设计[J]. 制造业自动化, 2021, 43(3): 14-16 + 31WANG G D, XU S C, FENG N N, et al. Design of sucker arrangement for vacuum sucker plate grabbing device[J]. Manufacturing Automation, 2021, 43(3): 14-16 + 31 (in Chinese) [8] 贺道坤. 基于Deep Q Networks的机械臂推动和抓握协同控制[J]. 现代制造工程, 2021(7): 23-28HE D K. Collaborative control of mechanical arm pushing and grasping based on Deep Q Networks[J]. Modern Manufacturing Engineering, 2021(7): 23-28 (in Chinese) [9] 秦志民, 高振清, 高宝雷, 等. 视觉机械臂物体识别与抓取技术研究及系统开发[J]. 机械科学与技术, 2022, 41(7): 1018-1022 doi: 10.13433/j.cnki.1003-8728.20200385QIN Z M, GAO Z Q, GAO B L, et al. Exploring target recognition and grasping technology and developing vision manipulator system[J]. Mechanical Science and Technology for Aerospace Engineering, 2022, 41(7): 1018-1022 (in Chinese) doi: 10.13433/j.cnki.1003-8728.20200385 [10] 田跃欣, 吴芬芬. 卷积神经网络算法在工件抓取中的应用[J]. 机床与液压, 2020, 48(15): 76-80TIAN Y X, WU F F. Application of convolutional neural network algorithm in artifact grabbing[J]. Machine Tool & Hydraulics, 2020, 48(15): 76-80 (in Chinese) [11] 张业明, 李东园, 许未晴, 等. 柔性夹爪收缩与扩张过程的能耗研究[J]. 北京航空航天大学学报, 2021, 47(11): 2208-2214ZHANG Y M, LI D Y, XU W Q, et al. Energy consumption of flexible gripper during contraction and expansion[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(11): 2208-2214 (in Chinese) [12] 曹玉君, 尚建忠, 梁科山, 等. 软体机器人研究现状综述[J]. 机械工程学报, 2012, 48(3): 25-33 doi: 10.3901/JME.2012.03.025CAO Y J, SHANG J Z, LIANG K H, et al. Review of soft-bodied robots[J]. Journal of Mechanical Engineering, 2012, 48(3): 25-33 (in Chinese) doi: 10.3901/JME.2012.03.025 [13] 刘宏, 姜力. 仿人多指灵巧手及其操作控制[M]. 北京: 科学出版社, 2010: 1-8LIU H, JIANG L. Humanoid multi fingered dexterous hand and its operation control[M]. Beijing: Science Press, 2010: 1-8 (in Chinese) [14] SUN Y L, ZHANG Q J, CHEN X Y, et al. An optimum design method of Pneu-net actuators for trajectory matching utilizing a bending model and GA[J]. Mathematical Problems in Engineering, 2019, 2019: 6721897 [15] 皮杰, 柳军, 徐磊, 等. 三指柔性气动夹爪结构设计与实验[J]. 农业机械学报, 2020, 51(S1): 93-101 doi: 10.6041/j.issn.1000-1298.2020.S1.011PI J, LIU J, XU L, et al. Structure design and experiment of three finger flexible pneumatic gripper[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S1): 93-101 (in Chinese) doi: 10.6041/j.issn.1000-1298.2020.S1.011 [16] YAP H K, NG H Y, YEOW C H. High-force soft printable pneumatics for soft robotic applications[J]. Soft Robotics, 2016, 3(3): 144-158 doi: 10.1089/soro.2016.0030 -






 点击查看大图
点击查看大图
图(9) / 表(2)
计量
- 文章访问数: 179
- HTML全文浏览量: 128
- PDF下载量: 41
- 被引次数: 0
