




Design on Pitching Control Strategy of Wheeled Crane Cab
-
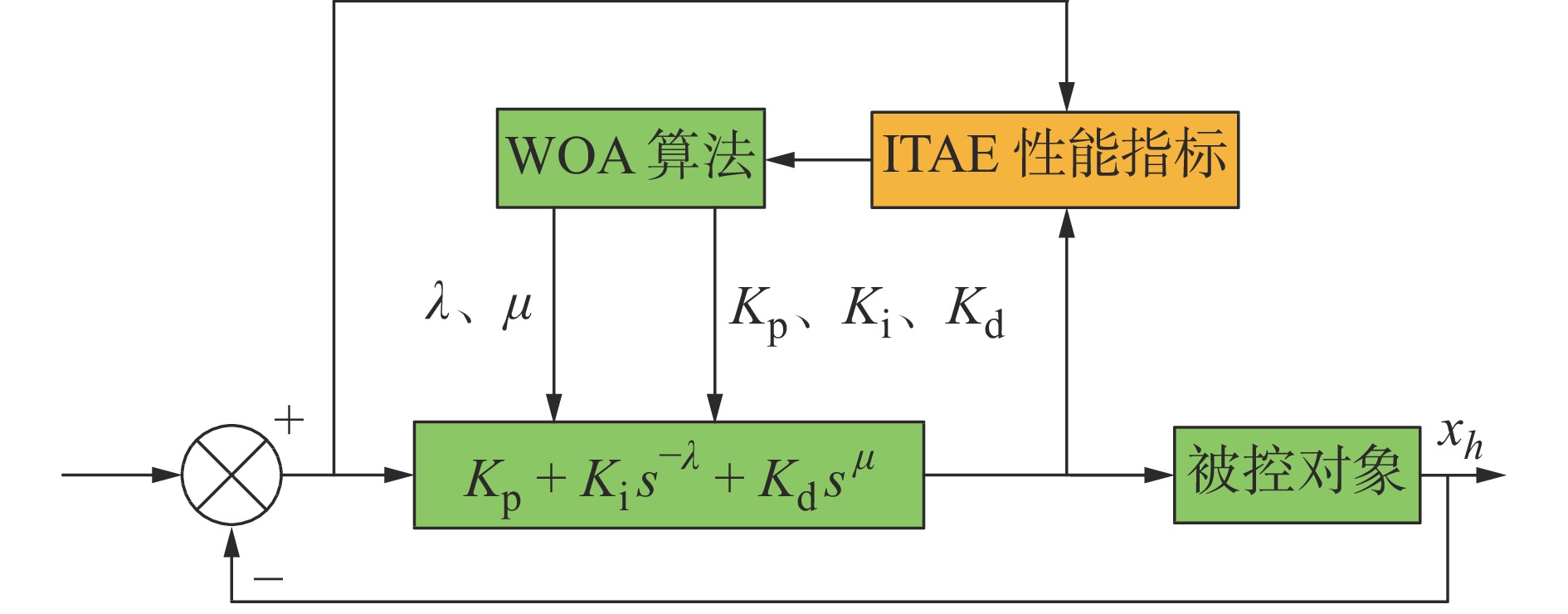
摘要: 在面临超大服役空间的起升高度场合进行作业时,轮式起重机的驾驶室需要适时调整上仰下俯动作以适应升降变化。为获得稳定的驾驶室空间变化,采用物理拓扑结构解耦,构建液压系统的数学模型,并提出鲸鱼算法优化分数阶控制器(WOA-FOPID)的控制策略,重点分析对比控制策略优化前后的动态响应性和抗干扰性。结果表明,WOA-FOPID控制策略可以对驾驶室的俯仰进行准确、快速、稳定的控制,提高了驾驶室的舒适性和宜人性。Abstract: When working at the lifting height in large service space, the cab of wheeled crane needs to adjust the up and down actions in time to adapt to the lifting changes. In order to obtain the stable spatial change of the cab, the physical topology decoupling is used to construct the mathematical model of the hydraulic system, and the whale algorithm is proposed to optimize the control strategy of the fractional order controller (WOA-FOPID), focusing on the analysis and comparison of the dynamic response and anti-interference before and after the optimization of the control strategy. The results show that WOA-FOPID control strategy can accurately, quickly and stably control the cab pitch, improve the comfort and amenity of the cab, and this study has certain guiding significance in engineering practice.
-
Key words:
- wheeled crane /
- large lifting height /
- cab /
- WOA-FOPID /
- control strategy
-
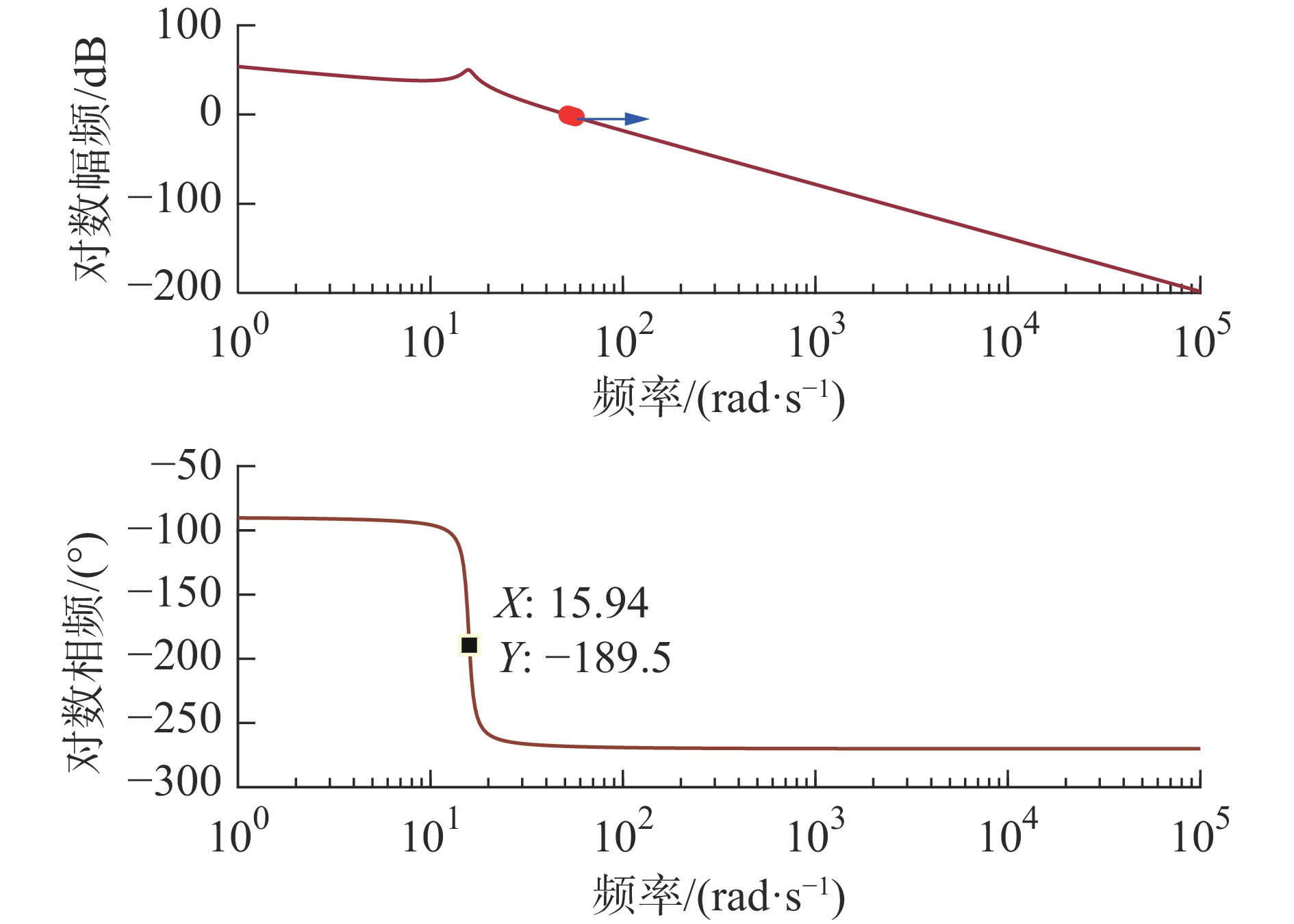
图 4 系统在无干扰无控制状态下Bode图
Figure 4. Bode diagram of the system in a state of no interference and no control

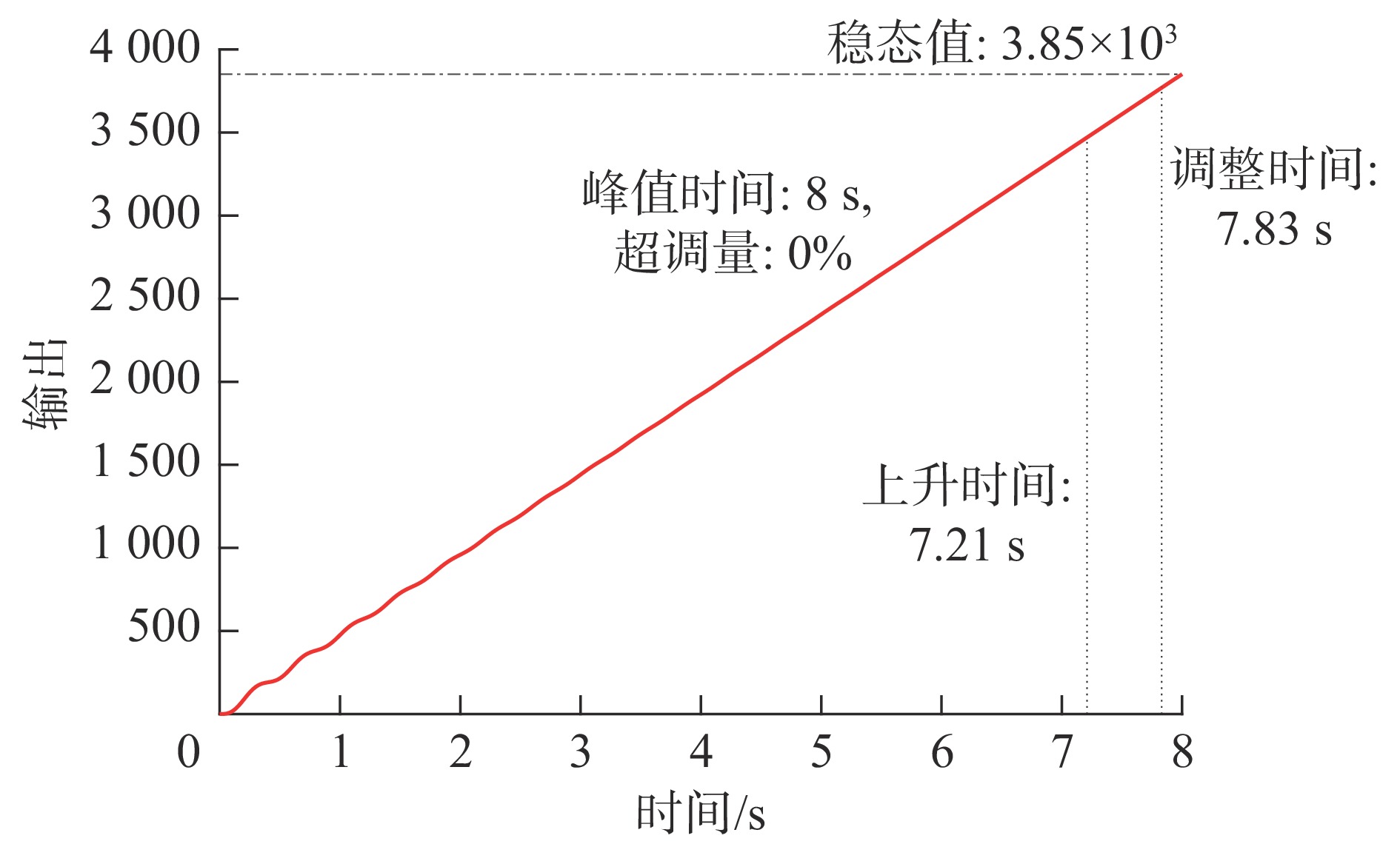
图 8 有无优化算法FOPID的阶跃响应对比图
Figure 8. Comparison of step response with and without optimization algorithm FOPID
表 1 数学模型参数
Table 1. Mathematical model parameters
参数 参数值 阀芯的固有频率$ \omega\mathrm{_h} $ 15.1 阀芯的阻尼比$ \xi_{\mathrm{h}} $ 0.046 活塞有效面积$ {A_1} $/m2 5.02 × 10−3 流量增益$ K\mathrm{_q}\underline{ } $/(m2·s−1) 2.42  下载: 导出CSV
下载: 导出CSV
表 2 控制策略阶跃响应参数
Table 2. Control strategy's step response parameters
控制策略 超调量/% 稳定时间/s FOPID 26.3582 0.12 WOA-FOPID 2.63 0.02
下载: 导出CSV
-
[1] 白林迎, 管小兴. 轮式起重机控制驾驶室俯仰液压系统AMESim的仿真与优化[J]. 液压气动与密封, 2019, 39(5): 85-87.BAI L Y, GUAN X X. Simulation and optimization of wheel crane cab pitch hydraulic system based on AMESim[J]. Hydraulics Pneumatics & Seals, 2019, 39(5): 85-87. (in Chinese) [2] 孙艳芬. 桥式起重机模糊自适应PID控制系统的应用[J]. 山东农业大学学报(自然科学版), 2018, 49(6): 1020-1023.SUN Y F. Application of fuzzy adaptive PID control system in bridge crane[J]. Journal of Shandong Agricultural University (Natural Science Edition), 2018, 49(6): 1020-1023. (in Chinese) [3] 曹传剑, 宋慧, 姜云春, 等. 基于自适应滑模控制的随车起重机控制特性分析[J]. 机床与液压, 2021, 49(12): 166-170.CAO C J, SONG H, JIANG Y C, et al. Control characteristics analysis of lorry-mounted crane based on adaptive sliding mode control[J]. Machine Tool & Hydraulics, 2021, 49(12): 166-170. (in Chinese) [4] 刘宏博. 基于批次控制和模糊控制的桥式起重机防摇控制系统研究[D]. 大连: 大连理工大学, 2016.LIU H B. The study of anti-swing control system based on run-to-run control and fuzzy control for overhead crane[D]. Dalian: Dalian University of Technology, 2016. (in Chinese) [5] 林静正, 方勇纯, 卢彪, 等. 基于迭代学习和神经网络的船用起重机控制[J]. 控制理论与应用, 2022, 39(4): 602-612.LIN J Z, FANG Y C, LU B, et al. Controller design of an offshore boom crane utilizing iterative learning and neural network[J]. Control Theory & Applications, 2022, 39(4): 602-612. (in Chinese) [6] 张彩红, 刘永志, 杨云勇, 等. 全地面起重机自动排绳系统设计及控制研究[J]. 机械设计与制造, 2017(9): 190-192.ZHANG C H, LIU Y Z, YANG Y Y, et al. The designand control of the all-terrain crane automatic rope system[J]. Machinery Design & Manufacture, 2017(9): 190-192. (in Chinese) [7] 余容, 陈子龙, 何朝明. 核用智能桥式起重机实时纠偏控制策略[J]. 机械设计与制造, 2017(2): 50-52.YU R, CHEN Z L, HE C M. Real-time correction control strategy of nuclear intelligent bridge crane[J]. Machinery Design & Manufacture, 2017(2): 50-52. (in Chinese) [8] 王博, 肖金凤, 贾磊, 等. 粒子群优化模糊PID的塔式起重机定位和防摆研究[J]. 南华大学学报(自然科学版), 2021, 35(2): 47-52.WANG B, XIAO J F, JIA L, et al. Study on positioning and anti-pendulum of tower crane based on particle swarm optimization fuzzy PID[J]. Journal of University of South China (Science and Technology), 2021, 35(2): 47-52. (in Chinese) [9] 赵田锋, 许红梅, 李岩, 等. 原子力显微镜的分数阶PID控制设计[J]. 电子测量与仪器学报, 2021, 35(5): 91-99.ZHAO T F, XU H M, LI Y, et al. Design of fractional PID control for atomic force microscope[J]. Journal of Electronic Measurement and Instrumentation, 2021, 35(5): 91-99. (in Chinese) [10] DEVI M S, KUMAR V S. WITHDRAWN: optimized FOPID controller for power quality enhancement between feeders using interline dynamic voltage restorer[J]. Materialstoday: Proceedings, 2021. [11] 丁玉兰. 人机工程学[M]. 5版. 北京: 北京理工大学出版社, 2017.DING Y L. Man machine engineering[M]. Beijing: Beijing Institute of Technology Press, 2017. (in Chinese) [12] 张明军. 基于人机工程学理论的汽车起重机操纵装置改进与设计探析[J]. 现代农机, 2021(2): 31-33.ZHANG M J. Improvement and design of truck crane control device based on ergonomics theory[J]. Modern Agricultural Machinery, 2021(2): 31-33. (in Chinese) [13] 辛运胜, 张亚伶, 徐格宁. 基于CATIA的桥式起重机司机室人机工程设计[J]. 起重运输机械, 2020(3): 51-57.XIN Y S, ZHANG Y L, XU G N. Ergonomic design of cab of overhead crane based on CATIA[J]. Hoisting and Conveying Machinery, 2020(3): 51-57. (in Chinese) [14] 孙建锐. 港口起重机司机室人机工程现状及优化研究[J]. 起重运输机械, 2017(4): 62-65. doi: 10.3969/j.issn.1001-0785.2017.04.022SUN J R. Research on status quo and optimization of human-machine engineering for cab of port crane[J]. Hoisting and Conveying Machinery, 2017(4): 62-65. (in Chinese) doi: 10.3969/j.issn.1001-0785.2017.04.022 [15] 边轩毅, 赵静, 李娟莉. WK-35大型矿用挖掘机驾驶室人机工程改进设计[J]. 矿业研究与开发, 2019, 39(7): 92-98. doi: 10.13827/j.cnki.kyyk.2019.07.020BIAN X Y, ZHAO J, LI J L. Man-machine engineering improvement design of WK-35 large mining excavator cab[J]. Mining Research and Development, 2019, 39(7): 92-98. (in Chinese) doi: 10.13827/j.cnki.kyyk.2019.07.020 -




 点击查看大图
点击查看大图

计量
- 文章访问数: 27
- HTML全文浏览量: 9
- PDF下载量: 10
- 被引次数: 0
