




Algorithm of Quadratic Speed Curve for Comfortable Parking
-
摘要: 停车制动过程中车速变为0时,车辆加速度的阶跃变化是影响制动舒适性的主要原因。通过对纵向制动工况进行控制,即对制动后期的加速度和速度重新规划,对速度的规划采用二次曲线形式。规划后车辆制动时的冲击度(加速度的时间变化率)明显减小。在MATLAB软件中验证了算法的正确性,并通过Simulink和Carsim联合仿真得到了整车层面上的优化结果。针对制动舒适性与制动安全性的问题,提出制动系统“减压-保压-增压”的解决方案,并进行了实车试验,试验结果表明各项评价指标良好,在保证安全性的情况下提高了舒适性。Abstract: Reconstructing the vehicle braking process again and judging the late braking period plays a decisive role in vehicle braking comfort. To control the longitudinal braking condition, it is necessary to re-plan the acceleration and speed in the later braking period, in which the speed planning adopts the form of quadratic curve. After speed planning, the impact degree (the time change rate of acceleration) when the vehicle brakes is obviously reduced. The correctness of the algorithm is verified in MATLAB software, and the optimization results at the vehicle level are obtained through the joint simulation of Simulink and Carsim. Aiming at the problems of braking comfort and braking safety, the solution of "decompression-pressure maintaining-pressure increasing" of the braking system is put forward, and the real vehicle test is carried out. The test results show that all evaluation indexes are good, and the braking comfortableness is improved while ensuring the safety.
-
Key words:
- velocity conic /
- braking input /
- jerk /
- braking comfortableness
-
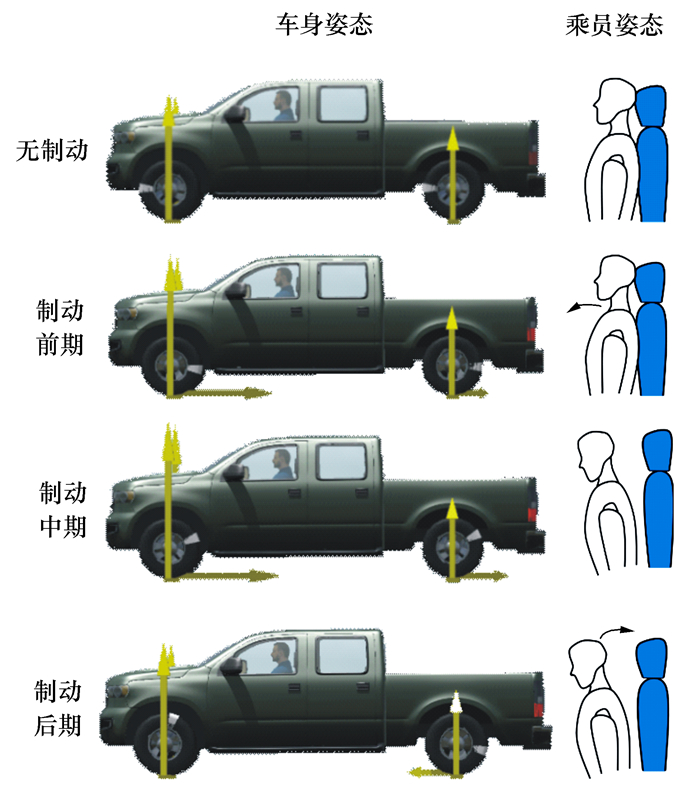
图 2 制动过程中车身与乘员的姿态变化
Figure 2. Change of attitude of vehicle body and occupant during braking
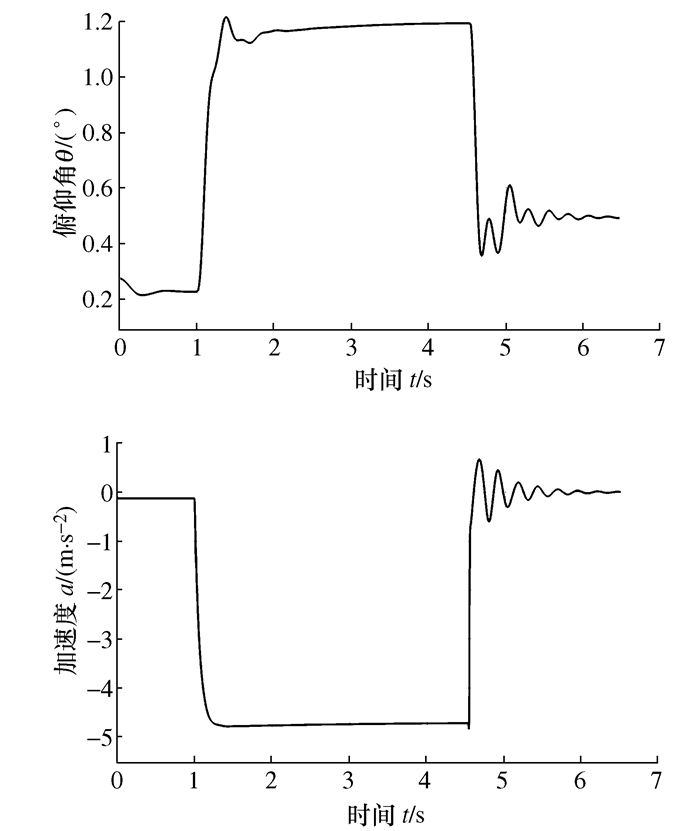
图 3 普通制动时加速度、俯仰角曲线
Figure 3. Acceleration and pitch angle response during normal braking
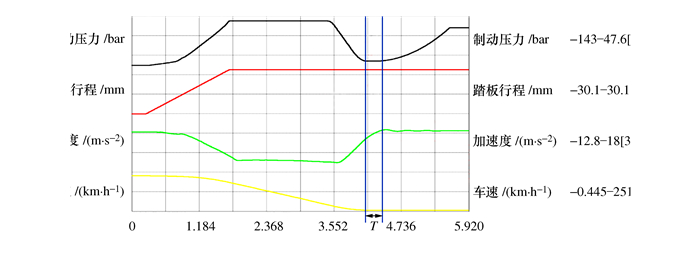
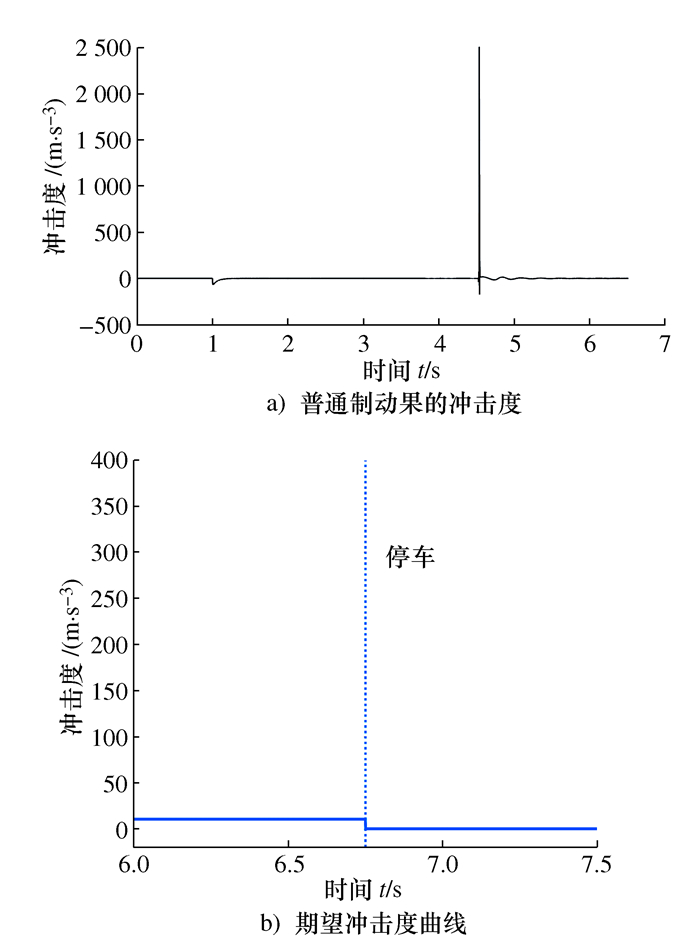
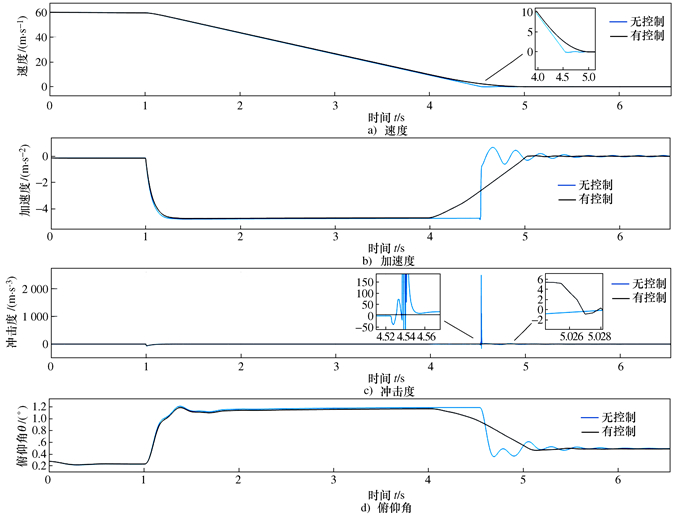
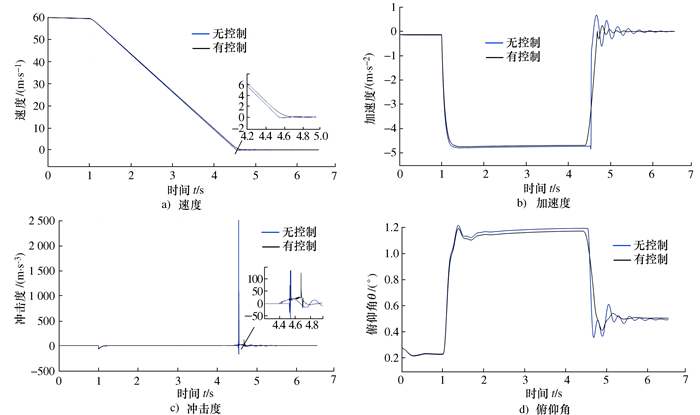
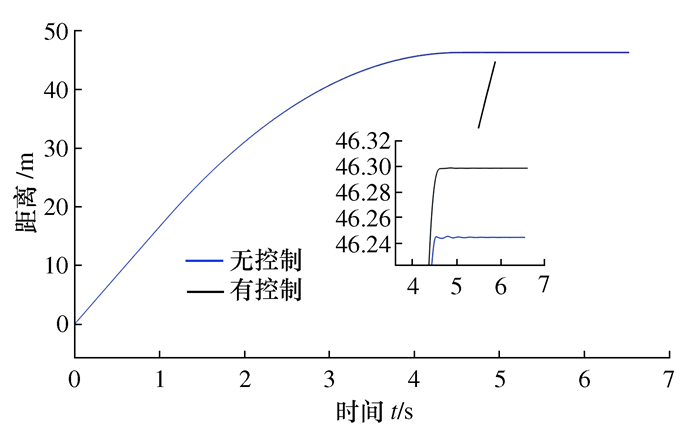
图 12 制动过程中各参数的变化曲线
Figure 12. Curve of various parameter changes during the braking process
表 1 算法作用前后效果对比
Table 1. Comparison of effects with or without algorithmic effects
制动情况 制动距离/m 冲击度/(m·s-3) 无控制 46.24 2 511 有控制 46.29 125  下载: 导出CSV
下载: 导出CSV
-
[1] PAVLOV N L. Reducing pitch angle and suspension jounces of a truck when braking on railway crossing by control of semiactive suspension[J]. International Journal of Mechanical Engineering and Technology, 2019, 10(3): 1584-1586. [2] WANG X F, SHI G, JIN L G, et al. A study on pitching characteristics of the passenger car in braking process[C]//Proceedings of the FISITA 2012 World Automotive Congress. Berlin: Springer, 2013: 505-522. [3] BIN AHMAD F, HUDHA K, JAMALUDDIN H. Gain scheduling PID control with pitch moment rejection for reducing vehicle dive and squat[J]. International Journal of Vehicle Safety, 2009, 4(1): 45-83. doi: 10.1504/IJVS.2009.026973 [4] ZHANG Y C, ZHAO L, CONG H, et al. Study on control of vehicle attitude and ride comfort based on full-car model[C]//Fifth World Congress on Intelligent Control and Automation (IEEE Cat. No. 04EX788). Hangzhou: IEEE, 2004: 3514-3519. [5] TAVERNINI D, VELENIS E, LONGO S. Feedback brake distribution control for minimum pitch[J]. Vehicle System Dynamics, 2017, 55(6): 902-923. doi: 10.1080/00423114.2017.1293275 [6] TAVERNINI D, VELENIS E, LONGO S. Model-based active brake force distribution for pitch angle minimization[C]//2015 54th IEEE Conference on Decision and Control (CDC). Osaka: IEEE, 2015: 197-202. [7] LEE J, CHOI S. Braking control for improving ride comfort[J]. MATEC Web of Conferences, 2018, 166: 02002. doi: 10.1051/matecconf/201816602002 [8] HOU X H, ZHANG J Z, LIU W L, et al. LuGre model-based longitudinal ride comfort control of vehicle during the post-braking phase[C]//2020 Chinese Automation Congress (CAC). Shanghai: IEEE, 2020: 7307-7313. [9] KOO S L. Vehicle control utilizing an improved model of tire contact patch kinematics[M]. Berkeley: University of California, 2007. [10] KOO S L, TAN H S, TOMIZUKA M. Analysis of vehicle longitudinal dynamics for longitudinal ride comfort[C]//ASME 2006 International Mechanical Engineering Congress and Exposition. Chicago: ASME, 2006: 431-439. [11] KOO S L, TAN H S, BU F P, et al. Vehicle longitudinal ride comfort control in stop-and-go traffic[C]// ASME 2006 International Mechanical Engineering Congress and Exposition. Chicago: ASME, 2006: 473-481. [12] DE VRIES E, FEHN A, RIXEN D. Flatness-based model inverse for feed-forward braking control[J]. Vehicle System Dynamics, 2010, 48(S1): 353-372. [13] ANTONOV S, FEHN A, KUGI A. A new flatness-based control of lateral vehicle dynamics[J]. Vehicle System Dynamics, 2008, 46(9): 789-801. doi: 10.1080/00423110701602696 [14] 陈朋成. 电动助力制动系统及压力控制方法研究[D]. 长春: 吉林大学, 2019.CHEN P C. Research on control strategy of the electric power assisted brake system and pressure[D]. Changchun: Jilin University, 2019. (in Chinese) [15] ZHAO J, HU Z Q, ZHU B. Pressure control for hydraulic brake system equipped with an electro-mechanical brake booster[R]. SAE Technical Paper, 2018. [16] XIONG Z, GUO X X, YANG B, et al. Modeling and pressure tracking control of a novel electro-hydraulic braking system[J]. Advances in Mechanical Engineering, 2018, 10(3): 1687814018764153. [17] 霍舒豪. 基于悬架和线控制动联合控制的制动平顺性研究[D]. 北京: 清华大学, 2015.HUO S H. Research on braking ride comfort based on integrated control of suspension and brake-by-wire system[D]. Beijing: Tsinghua University, 2015. (in Chinese) [18] GOUDY R A. Brake control strategy for optimized safety and comfort[C]//Towards the New Horizon Together. Proceedings of the 5th World Congress on Intelligent Transport Systems. Transport Research Laboratory, 1998. [19] MOHTAVIPOUR S M, MOLLAJAFARI M, NASERI A. A guaranteed-comfort and safe adaptive cruise control by considering driver's acceptance level[J]. International Journal of Dynamics and Control, 2019, 7(3): 966-980. doi: 10.1007/s40435-018-0500-5 [20] CHEN S, ZHANG X L, WANG J Z. Sliding mode control of vehicle equipped with brake-by-wire system considering braking comfort[J]. Shock and Vibration, 2020, 2020: 5602917. -



 点击查看大图
点击查看大图
计量
- 文章访问数: 90
- HTML全文浏览量: 41
- PDF下载量: 17
- 被引次数: 0
