




Application of Improved Gray Wolf Algorithm in Trajectory Planning of Pallet Handling Robot
-
摘要: 为提高托盘式搬运机器人的运行稳定性,提出一种基于改进灰狼算法的机器人加速度最优轨迹规划方法。针对灰狼算法局部收敛、寻优性能不足等问题,引入Logistic-Tent混沌映射,优化初始种群;引入差分优化算法,提高全局搜索能力;引入淘汰进化机制,优化种群结构,从而全面提升优化性能。仿真结果表明,对比标准灰狼算法和粒子群算法,改进灰狼算法在不同类型的测试函数中具有更好的收敛速度和算法精度;在搬运机器人轨迹规划的应用中,经过该算法优化后的机器人最大关节角加速度下降了44.11%,大幅提高了运行稳定性。Abstract: In order to improve the running stability of the pallet handling robot, an optimal trajectory planning method for robot acceleration based on the improved gray wolf algorithm is proposed. Aiming at the problems of local convergence and insufficient optimization performance of gray wolf algorithm, the Logistic-Tent chaotic map is introduced to optimize the initial population; the differential optimization algorithm is introduced to improve the global search ability; the elimination evolution mechanism is introduced to optimize the population structure and improve the optimization performance in all-round way. Compared with the standard gray wolf algorithm and the particle swarm algorithm, simulation results show that improved gray wolf algorithm has better convergence speed and algorithm accuracy in different types of test functions. In the application of the trajectory planning of the handling robot, after the optimization of the algorithm, the maximum joint angular acceleration of the robot is reduced by 44.11%, which greatly improves the running stability.
-
Key words:
- handling robot /
- trajectory planning /
- acceleration /
- gray wolf algorithm
-

图 1 PSO、GWO和IGWO算法求解8种基准函数的收敛曲线图
Figure 1. Convergence curves of PSO, GWO, and IGWO algorithms for solving 8 benchmark functions
表 1 各算法参数设置
Table 1. Parameter settings for each algorithm
算法 参数 IGWO 交叉概率0.8;缩放因子0.6;种群淘汰比例因子6 PSO 惯性权重分别为0.9和0.6,学习因子c1=c2=2;
个体速度范围为[−0.5,0.5] 下载: 导出CSV
下载: 导出CSV
表 2 各基准函数
Table 2. Each benchmark function
函数 表达式 维数 定义域 F1 ${F_1}(x) = {\max _i}\left\{ {|{x_i}|,1 \leqslant i \leqslant 30} \right\}$ 30 [−100, 100] F2 ${F_2}(x) = \displaystyle\sum\limits_{i = 1}^{30} {{\left(\displaystyle\sum\limits_{i = 1}^{30} {{x_j}} \right)^2}} $ 30 [−100, 100] F3 ${F_3}(x) = - 20\exp \left( - 0.2\sqrt {\dfrac{1}{ {30} }\displaystyle\sum\limits_{i = 1}^{30} {x_i^2} } \right) - {\rm exp}\left(\dfrac{1}{ {30} }\displaystyle\sum\limits_{i = 1}^{30} {\cos 2{\text{π} } x_i^2} \right) + 20 + e$ 30 [−32, 32] F4 ${F_4}(x) = \displaystyle\sum\limits_{i = 1}^{30} {|{x_i}|} + \displaystyle\prod\limits_{i = 1}^{30} {|{x_i}|} $ 30 [−10, 10] F5 ${F_5}(x) = \displaystyle\sum\limits_{i = 1}^{30} {i{x_i}^4} + {\rm rand}[0,1)$ 30 [−1.28, 1.28] F6 ${F_6}(x) = \displaystyle\sum\limits_{i = 1}^{30} { - {x_i}\sin (\sqrt {|{x_i}|} )} $ 30 [−10, 10] F7 ${F_7}(x) = {\left[\begin{array}{c}\dfrac{1}{{500}} + \displaystyle\sum\limits_{j = 1}^{25} {\dfrac{1}{{j + \displaystyle\sum\limits_{i = 1}^2 {{{({x_i} - {a_{ij}})}^6}} }}} \end{array}\right]^{ - 1}}$ 2 [−65, 65] F8 ${F_8}(x) = \displaystyle\sum\limits_{i = 1}^{30} {[{x_i}^2} - 10\cos (2{\text{π}} {x_i}) + 10]$ 30 [−5.12, 5.12]
下载: 导出CSV
表 3 基准测试函数寻优结果
Table 3. Benchmarking function optimization results
函数 方法 平均值 最差值 最优值 标准差 F1 PSO 1.135816 1.514037 0.907737 0.183233 GWO 7.29 × 10−7 1.58 × 10−6 6.31 × 10−8 5.01 × 10−7 IGWO 7.18 × 10−10 3.09 × 10−9 5.12 × 10−11 8.28 × 10−10 F2 PSO 81.48382 114.4711 39.78484 21.821 GWO 3.20 × 10−5 2.95 × 10−4 2.29 × 10−9 8.76 × 10−5 IGWO 2.46 × 10−11 1.62 × 10−10 2.79 × 10−15 4.71 × 10−11 F3 PSO 0.129362 1.159753 0.003876 0.343681 GWO 1.01 × 10−13 1.29 × 10−13 7.90 × 10−14 1.58 × 10−14 IGWO 2.86 × 10−14 3.29 × 10−14 2.22 × 10−14 3.10 × 10−15 F4 PSO 4.25 × 10−2 1.55 × 10−1 5.81 × 10−3 0.041668 GWO 9.24 × 10−17 2.84 × 10−16 1.46 × 10−17 8.49 × 10−17 IGWO 1.23 × 10−25 4.04 × 10−25 1.32 × 10−26 1.18 × 10−25 F5 PSO 0.173628 0.279294 0.102187 0.059145 GWO 0.002243 0.006324 0.000439 0.001718 IGWO 0.000745 0.001364 0.000493 0.000237 F6 PSO −5089.57 −2701.84 −6686.21 1129.513 GWO −5844.04 −4751.61 −7069.2 726.476 IGWO −8.80 × 1057 −1.70 × 1052 −4.50 × 1058 1.33 × 1058 F7 PSO 2.679246 5.928845 0.998004 1.766345 GWO 3.844082 10.76318 0.998004 3.555987 IGWO 1.295817 2.982105 0.998004 0.635439 F8 PSO 56.04584 96.30331 31.89847 17.4922 GWO 4.181775 22.25851 5.68 × 10−14 6.871585 IGWO 5.24 × 10−14 4.7 × 10−13 0 1.415671
下载: 导出CSV
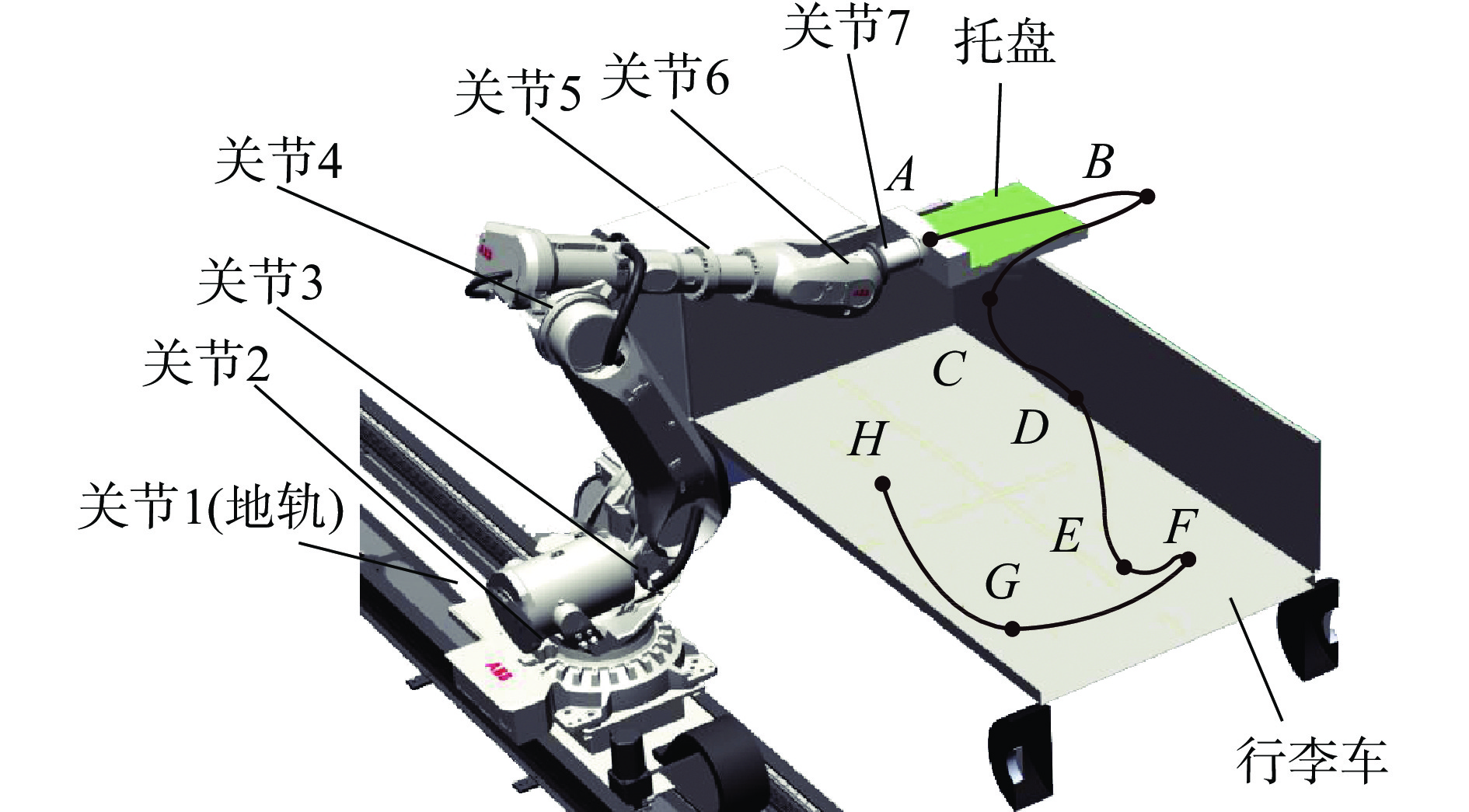
表 4 路径点序列
Table 4. Path point sequence
位置 d1/m θ2/(°) θ3/(°) θ4/(°) θ5/(°) θ6/(°) θ7/(°) A 1.1874 47.2280 −65.2963 −20.1557 85.8047 −47.3947 83.8156 B 2.6150 0.8813 −49.8247 −45.1954 −9.97077 5.09677 0.06786 C 2.4393 6.6172 −83.8267 −0.533756 49.7327 −8.6861 59.4064 D 1.8821 47.2274 −65.2832 −20.1933 85.8270 −47.3923 83.8487 E 1.0969 25.7134 −99.5115 17.6056 73.7020 −26.8743 71.8517 F 0.8791 25.3446 −49.9048 19.7835 28.7049 −63.0295 13.9472 G 0.9968 33.0464 −68.6310 53.4117 33.9881 −77.2882 8.4386 H 1.0602 30.6196 −113.7357 41.3231 62.9544 −34.8809 58.1045
下载: 导出CSV
-
[1] NAGY Á, VAJK I. Nonconvex time-optimal trajectory planning for robot manipulators[J]. Journal of Dynamic Systems, Measurement, and Control, 2019, 141(11): 111007. doi: 10.1115/1.4044216 [2] KIM J J, LEE J J. Trajectory optimization with particle swarm optimization for manipulator motion planning[J]. IEEE Transactions on Industrial Informatics, 2015, 11(3): 620-631. doi: 10.1109/TII.2015.2416435 [3] XIDIAS E K. Time-optimal trajectory planning for hyper-redundant manipulators in 3D workspaces[J]. Robotics and Computer-integrated Manufacturing, 2018, 50: 286-298. doi: 10.1016/j.rcim.2017.10.005 [4] LIU C, CAO G H, QU Y Y, et al. An improved PSO algorithm for time-optimal trajectory planning of Delta robot in intelligent packaging[J]. The International Journal of Advanced Manufacturing Technology, 2020, 107(3): 1091-1099. [5] MA J W, GAO S, YAN H T, et al. A new approach to time-optimal trajectory planning with torque and jerk limits for robot[J]. Robotics and Autonomous Systems, 2021, 140: 103744. doi: 10.1016/j.robot.2021.103744 [6] 米根锁, 李明. 布谷鸟搜索算法在空间机械臂轨迹规划中的应用研究[J]. 机械科学与技术, 2018, 37(12): 1805-1810.MI G S, LI M. Applying cuckoo search algorithm to path planning of space manipulator[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(12): 1805-1810. (in Chinese) [7] WU L, CHEN M S, XU J T, et al. Minimum-acceleration local modification method for planning tool orientations in 5-axis ball-end machining[J]. The International Journal of Advanced Manufacturing Technology, 2021, 114(7): 2271-2287. [8] 梁常春, 张晓东, 唐自新, 等. 空间机械臂关节故障引起速度突变的抑制[J]. 宇航学报, 2016, 37(1): 48-54.LIANG C C, ZHANG X D, TANG Z X, et al. Suppression of velocity mutation caused by space manipulator joint failure[J]. Journal of Astronautics, 2016, 37(1): 48-54. (in Chinese) [9] MIRJALILI S, MIRJALILI S M, LEWIS A. Grey wolf optimizer[J]. Advances in Engineering Software, 2014, 69: 46-61. doi: 10.1016/j.advengsoft.2013.12.007 [10] LI Y, LIN X X, LIU J S. An improved gray wolf optimization algorithm to solve engineering problems[J]. Sustainability, 2021, 13(6): 3208. doi: 10.3390/su13063208 [11] NADIMI-SHAHRAKI M H, TAGHIAN S, MIRJALILI S. An improved grey wolf optimizer for solving engineering problems[J]. Expert Systems with Applications, 2021, 166: 113917. doi: 10.1016/j.eswa.2020.113917 [12] RODRÍGUEZ L, CASTILLO O, SORIA J. Grey wolf optimizer with dynamic adaptation of parameters using fuzzy logic[C]//2016 IEEE Congress on Evolutionary Computation (CEC). Vancouver: IEEE, 2016: 3116-3123. [13] 左剑, 张程稳, 肖逸, 等. 基于灰狼优化算法的多机电力系统稳定器参数最优设计[J]. 电网技术, 2017, 41(9): 2987-2995.ZUO J, ZHANG C W, XIAO Y, et al. Multi-machine PSS parameter optimal tuning based on grey wolf optimizer algorithm[J]. Power System Technology, 2017, 41(9): 2987-2995. (in Chinese) [14] MIRJALILI S, GANDOMI A H. Chaotic gravitational constants for the gravitational search algorithm[J]. Applied Soft Computing, 2017, 53: 407-419. doi: 10.1016/j.asoc.2017.01.008 [15] 吕鑫, 慕晓冬, 张钧, 等. 混沌麻雀搜索优化算法[J]. 北京航空航天大学学报, 2021, 47(8): 1712-1720. doi: 10.13700/j.bh.1001-5965.2020.0298LYU X, MU X D, ZHANG J, et al. Chaos sparrow search optimization algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(8): 1712-1720. (in Chinese) doi: 10.13700/j.bh.1001-5965.2020.0298 [16] XU H L, QIAN X, ZHANG L. Study of ACO algorithm optimization based on improved tent chaotic mapping[J]. Journal of Information & Computational Science, 2012, 9(6): 1653-1660. [17] ZHANG J Q, SANDERSON A C. JADE: adaptive differential evolution with optional external archive[J]. IEEE Transactions on Evolutionary Computation, 2009, 13(5): 945-958. doi: 10.1109/TEVC.2009.2014613 [18] 曾念寅, 宋丹丹, 李寒, 等. 改进鲸鱼优化算法及涡轮盘结构优化[J]. 机械工程学报, 2021, 57(20): 254-265. doi: 10.3901/JME.2021.20.254ZENG N Y, SONG D D, LI H, et al. Improved whale optimization algorithm and turbine disk structure optimization[J]. Journal of Mechanical Engineering, 2021, 57(20): 254-265. (in Chinese) doi: 10.3901/JME.2021.20.254 [19] 吴虎胜, 张凤鸣, 吴庐山. 一种新的群体智能算法-狼群算法[J]. 系统工程与电子技术, 2013, 35(11): 2430-2438.WU H S, ZHANG F M, WU L S. New swarm intelligence algorithm-wolf pack algorithm[J]. Systems Engineering and Electronics, 2013, 35(11): 2430-2438. (in Chinese) [20] TENG Z J, LV J L, GUO L W. An improved hybrid grey wolf optimization algorithm[J]. Soft Computing, 2019, 23(15): 6617-6631. doi: 10.1007/s00500-018-3310-y -


 点击查看大图
点击查看大图
计量
- 文章访问数: 76
- HTML全文浏览量: 33
- PDF下载量: 0
- 被引次数: 0
