




Exploring Time-optimal Trajectory of Automatic Charging Manipulator with Improved Particle Swarm Optimization Algorithm
-
摘要: 针对桁架充电机械臂关节空间轨迹规划的时间优化问题,提出了一种非线性动态学习因子的粒子群算法。通过运动学分析获取工作空间,引入3-5-3多项式插值进行轨迹规划。结合运动过程中的速度与加速度约束,寻求运动过程中的最短时间。对比改进粒子群算法和基本粒子群算法的收敛速度,分析各关节优化前后运动时间的变化情况,并进行仿真实验验证。结果表明:改进粒子群算法的收敛性能较基本粒子群算法更快,整体运动时间缩短约33%,证实改进粒子群算法的可行性。Abstract: A particle swarm optimization (PSO) algorithm based on the nonlinear dynamic learning factor was proposed to solve the time optimization problem in the joint space trajectory planning of a truss charging manipulator. The workspace was obtained through kinematic analysis, and the 3-5-3 polynomial interpolation was introduced for the trajectory planning. The shortest motion time was sought through combining velocity constraints with acceleration constraints. The convergence speed of the improved PSO algorithm was compared with that of the basic PSO algorithm, and the variation of motion time of each joint before and after optimization was analyzed. The simulation results show that the convergence performance of the improved PSO algorithm is faster than that of the basic PSO algorithm and that the overall motion time is shortened by about 33%, confirming the feasibility of the improved PSO algorithm.
-
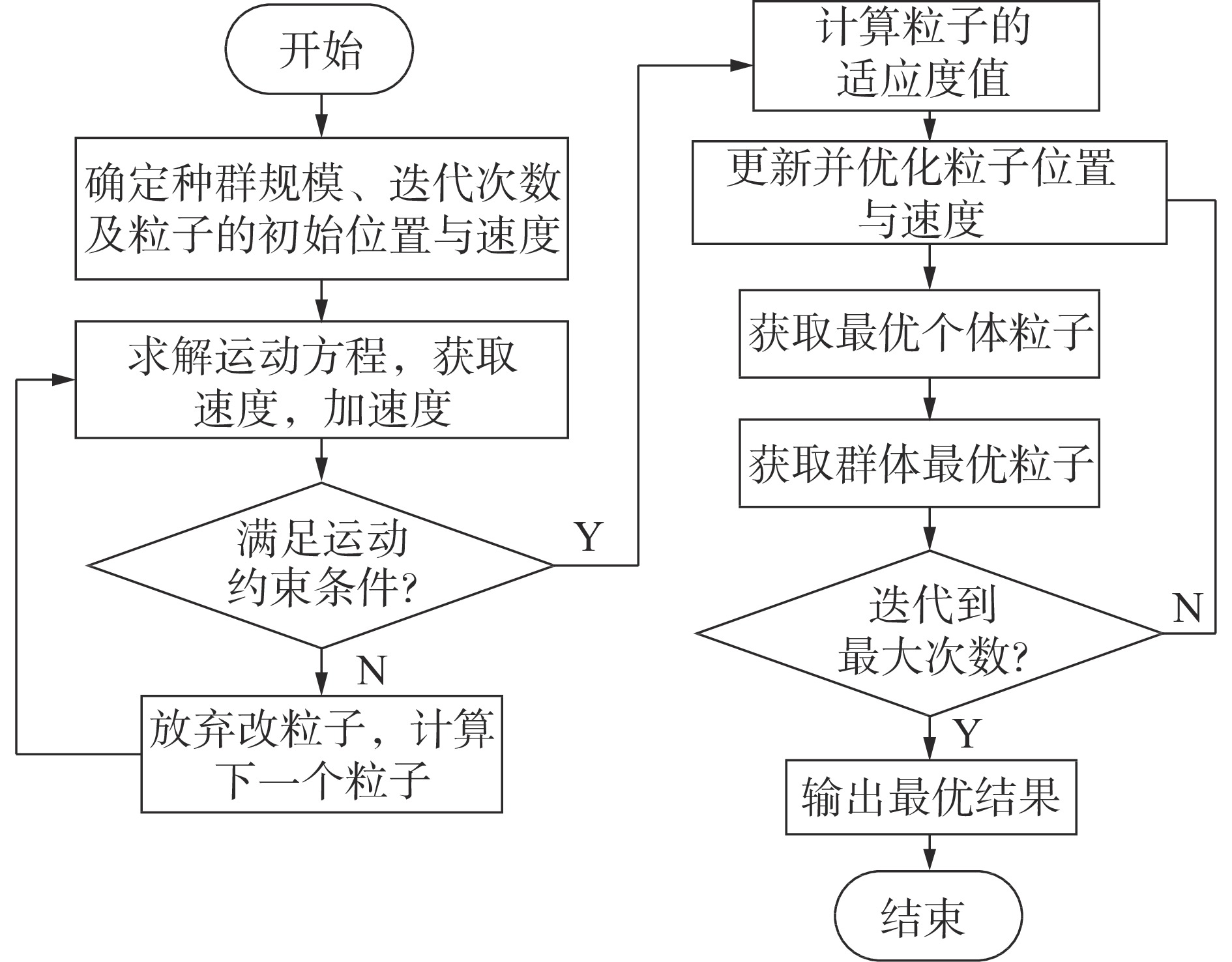
图 4 改进粒子群轨迹时间优化流程图
Figure 4. Improved particle swarm trajectory time optimization flow chart

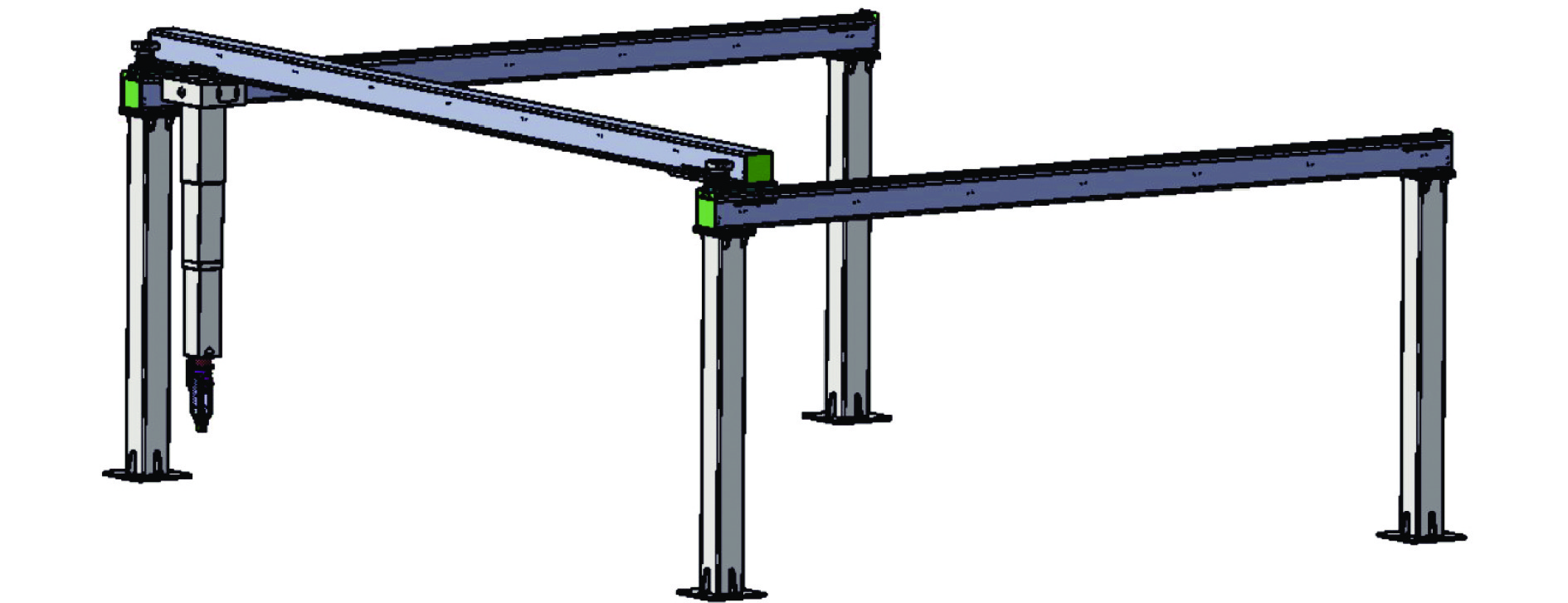
图 5 桁架充电机械臂时间优化实验平台
Figure 5. Experimental platform for time optimization of truss charging robot arm
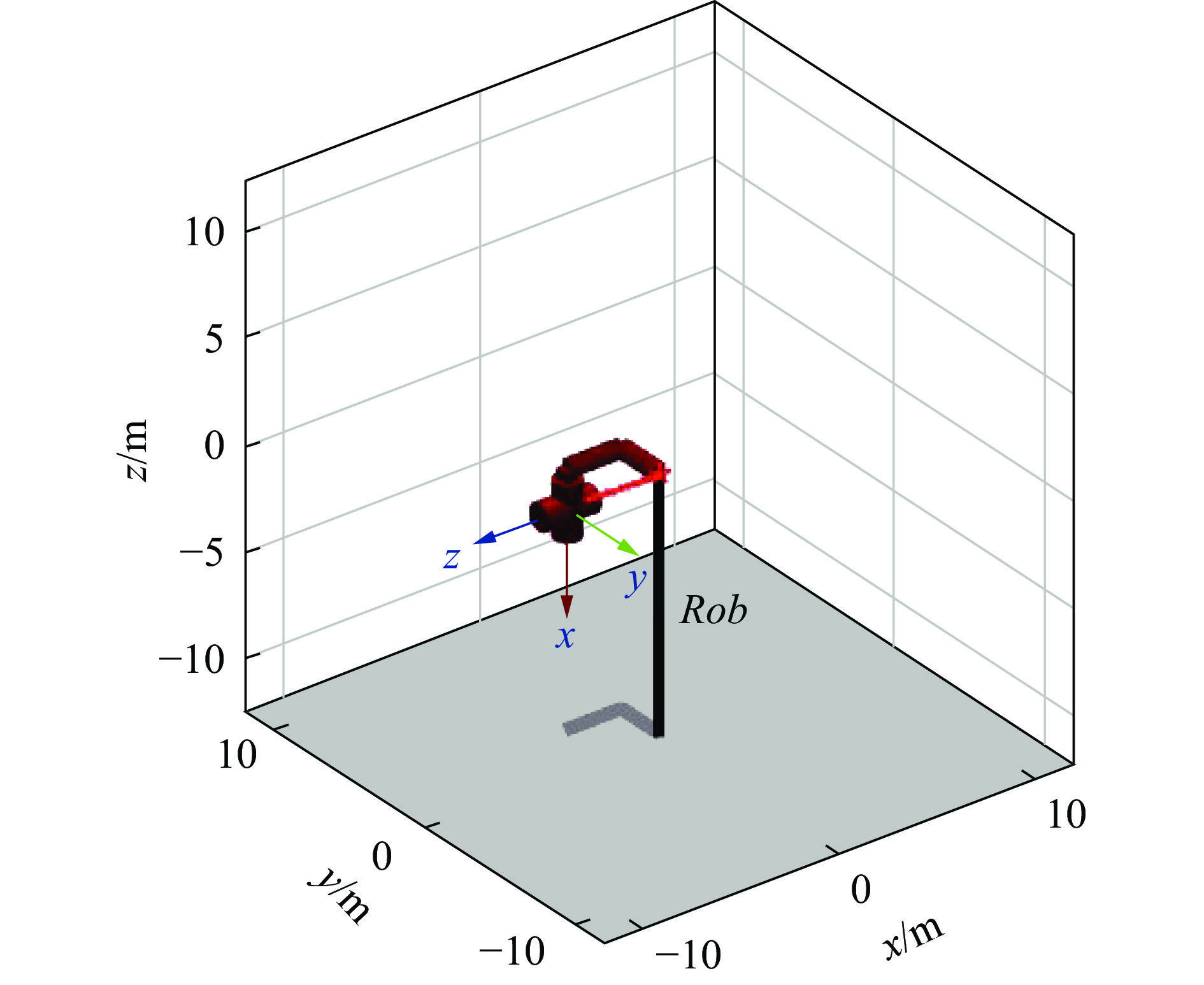
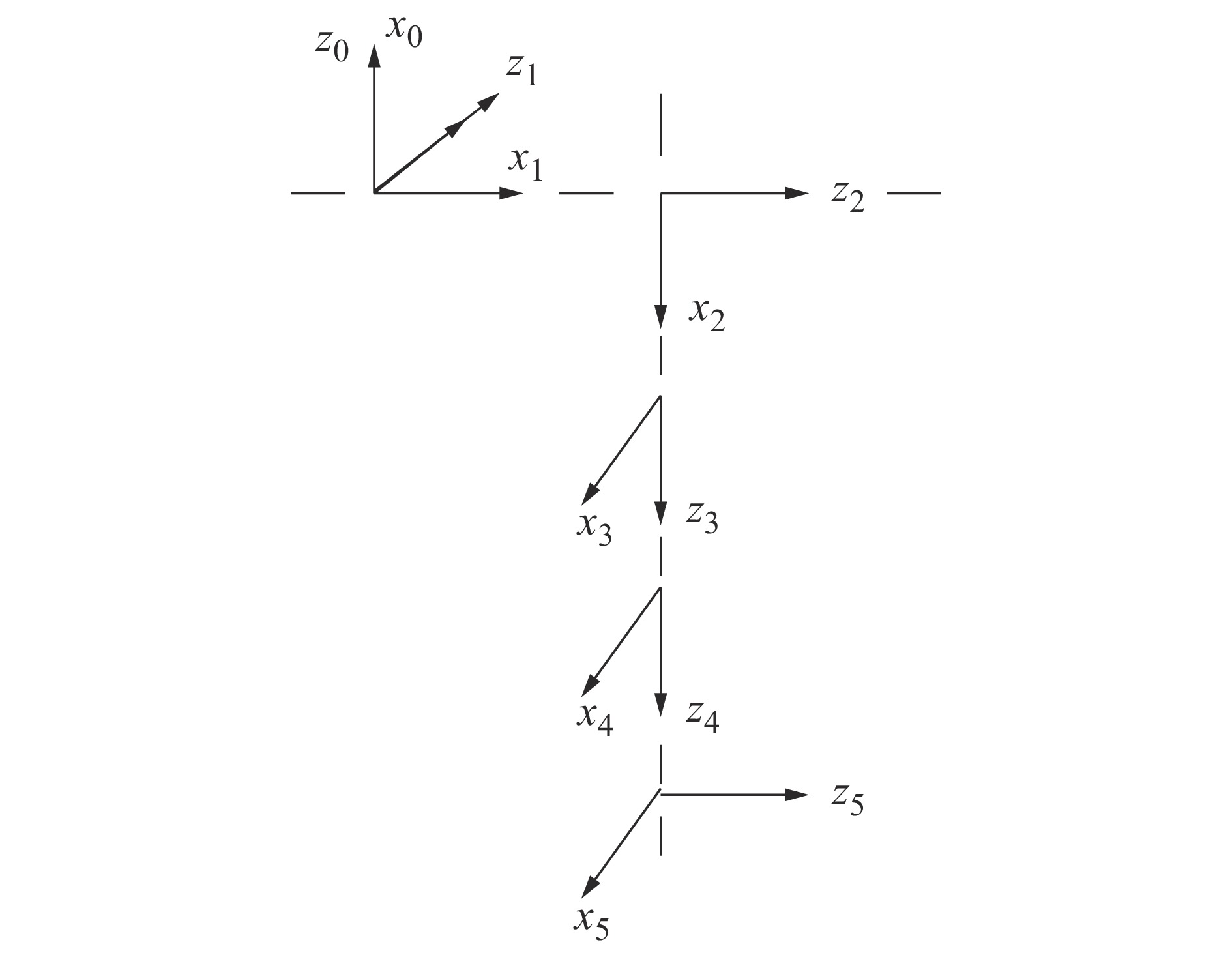
图 6 桁架充电机械臂运动学三维模型
Figure 6. Three dimensional kinematic model of truss charging robotic arm
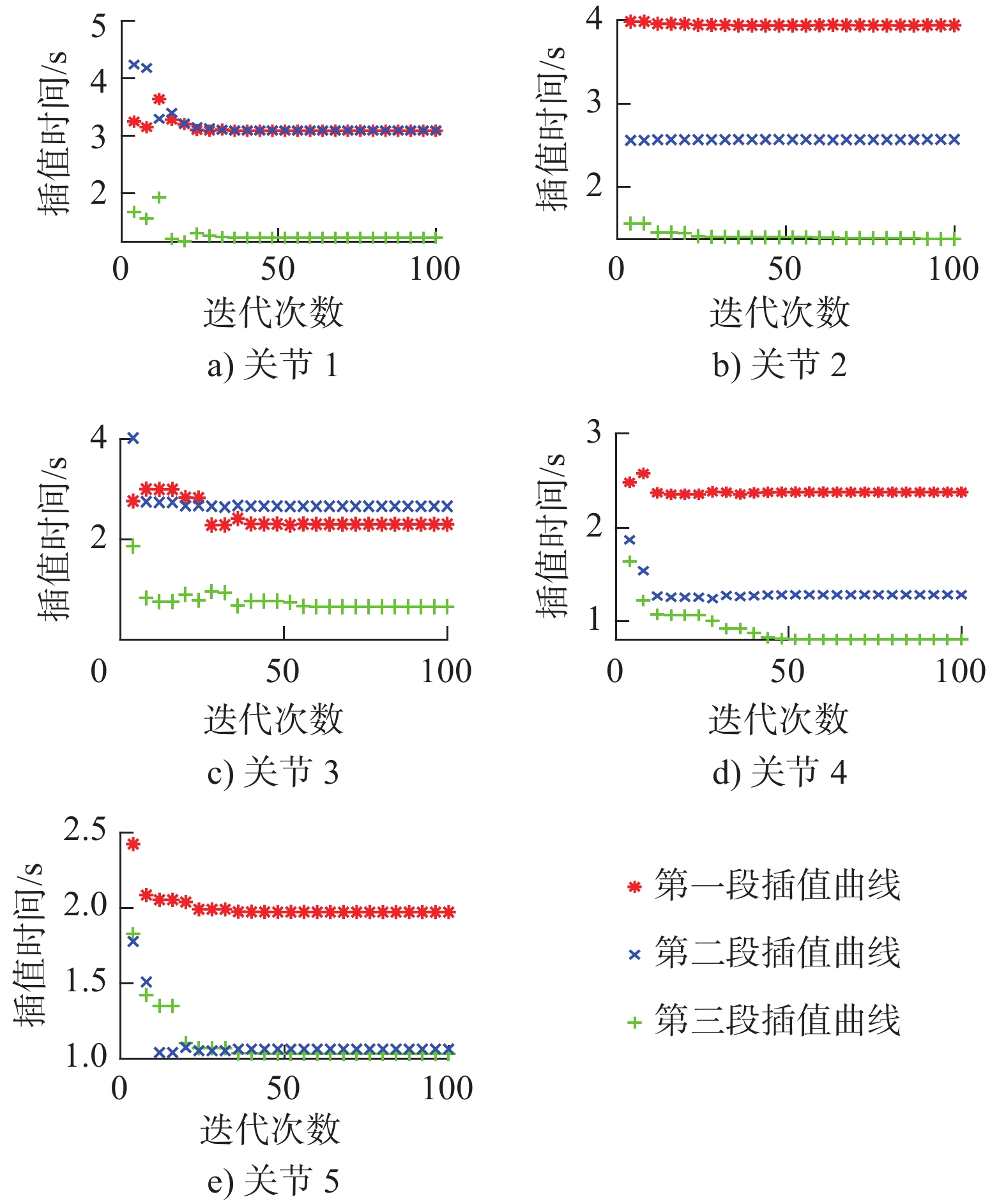
图 7 关节1 ~ 5最优粒子位置迭代各曲线时间分布
Figure 7. Time distribution of the optimal particle position iteration curves for joints 1-5

图 8 关节1 ~ 5的两种算法收敛过程对比图
Figure 8. Comparison of convergence processes between two algorithms for joints 1-5
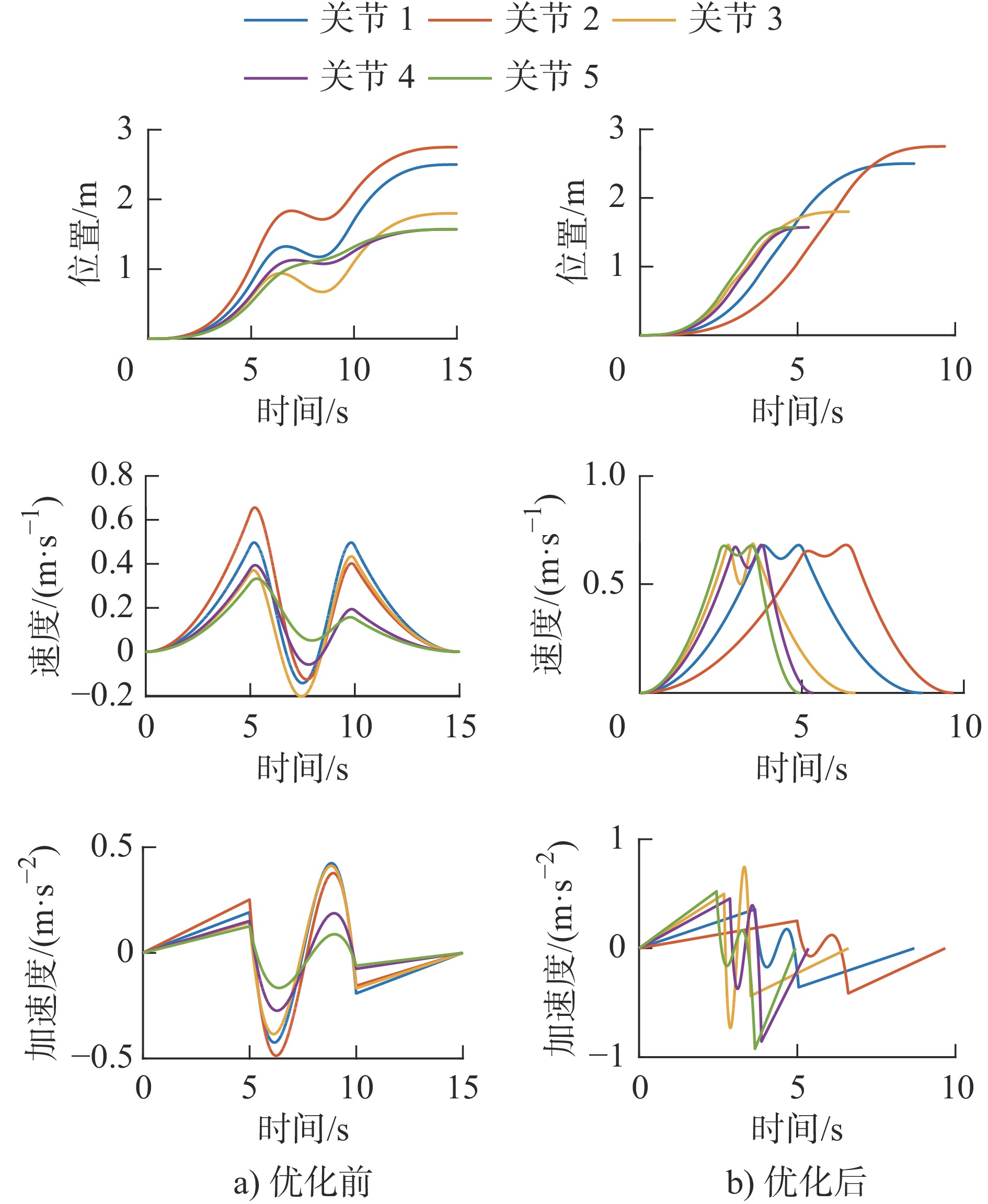
图 9 优化前后位置、速度与加速度对比
Figure 9. Comparison of position, velocity, and acceleration before and after optimization

图 10 实验与仿真时间优化结果对比图
Figure 10. Comparison of experimental and simulation time optimization results
表 1 D-H参数表
Table 1. D-H parameters
关节 ${\theta _i}$ di ai−1 ${\alpha _{i - 1}}$ qi 1 −90° 0 0 −90° d1 2 90° 0 0 90° d2 3 −90° 0 0 −90° d3 4 0 0.03 m 0 0 q4 5 0 0.10 m 0 90° q5  下载: 导出CSV
下载: 导出CSV
表 2 各关节空间运动变量插值点
Table 2. Interpolation points of motion variables in each joint space
关节 初始点 路径点1 路径点2 终止点 1 0 0.8 m 1.7 m 2.5 m 2 0 1.05 m 2.10 m 2.75 m 3 0 0.6 m 1.1 m 1.8 m 4 0 18° 36° 90° 5 0 15° 40° 90°
下载: 导出CSV
-
[1] 郭勇, 赖广. 工业机器人关节空间轨迹规划及优化研究综述[J]. 机械传动, 2020, 44(2): 154-165.GUO Y, LAI G. Review of joint space trajectory planning and optimization for industrial robot[J]. Journal of Mechanical Transmission, 2020, 44(2): 154-165. (in Chinese) [2] 庞飞. 工业机器人二次最优轨迹规划算法研究[D]. 沈阳: 东北大学, 2014: 3-4.PANG F. Research on quadratic optimal trajectory planning algorithm for industrial robot[D]. Shenyang: Northeastern University, 2014: 3-4. (in Chinese) [3] CHOI Y K, PARK J H, KIM H S, et al. Optimal trajectory planning and sliding mode control for robots using evolution strategy[J]. Robotica, 2000, 18(4): 423-428. doi: 10.1017/S0263574799002118 [4] 李黎, 尚俊云, 冯艳丽, 等. 关节型工业机器人轨迹规划研究综述[J]. 计算机工程与应用, 2018, 54(5): 36-50. doi: 10.3778/j.issn.1002-8331.1712-0116LI L, SHANG J Y, FENG Y L, et al. A Research of trajectory planning for articulated industrial robot: a review[J]. Computer Engineering and Applications, 2018, 54(5): 36-50. (in Chinese) doi: 10.3778/j.issn.1002-8331.1712-0116 [5] 王永琦, 江潇潇. 基于混合灰狼算法的机器人路径规划[J]. 计算机工程与科学, 2020, 42(7): 1294-1301. doi: 10.3969/j.issn.1007-130X.2020.07.019WANG Y Q, JIANG X X. Robot path planning using a hybrid grey wolf optimization algorithm[J]. Computational Engineering and Science, 2020, 42(7): 1294-1301. (in Chinese) doi: 10.3969/j.issn.1007-130X.2020.07.019 [6] LAMINI C, BENHLIMA S, ELBEKRI A. Genetic algorithm based approach for autonomous mobile robot path planning[J]. Procedia Computer Science, 2018, 127: 180-189. doi: 10.1016/j.procs.2018.01.113 [7] 张震, 方群, 宋金丰, 等. 基于协同粒子群算法的航天器集群动态路径规划算法研究[J]. 西北工业大学学报, 2021, 39(6): 1222-1232. doi: 10.3969/j.issn.1000-2758.2021.06.007ZHANG Z, FANG Q, SONG J F, et al. Research on dynamic path planning algorithm of spacecraft cluster based on cooperative particle swarm algorithm[J]. Journal of Northwestern Polytechnical University, 2021, 39(6): 1222-1232. (in Chinese) doi: 10.3969/j.issn.1000-2758.2021.06.007 [8] LUO Q, WANG H B, ZHENG Y, et al. Research on path planning of mobile robot based on improved ant colony algorithm[J]. Neural Computing and Applications, 2020, 32(6): 1555-1566. doi: 10.1007/s00521-019-04172-2 [9] 田兴华, 张纪会, 李阳. 基于混沌映射的自适应退火型粒子群算法[J]. 复杂系统与复杂性科学, 2020, 17(1): 45-54.TIAN X H, ZHANG J H, LI Y. An adaptive annealing particle swarm optimization based on chaotic mapping[J]. Complex Systems and Complexity Science, 2020, 17(1): 45-54. (in Chinese) [10] 陈波, 刘有余. 双种群粒子群算法的时间最优轨迹规划研究[J]. 机械科学与技术, 2022, 41(10): 1530-1535.CHEN B, LIU Y Y. Research on time optimal trajectory planning for double-population particle swarm optimization algorithm[J]. Mechanical Science and Technology for Aerospace Engineering, 2022, 41(10): 1530-1535. (in Chinese) [11] 巫光福, 万路萍. 粒子群算法优化机器人路径规划的研究[J]. 机械科学与技术, 2022, 41(11): 1759-1764.WU G F, WAN L P. Research on improved particle swarm optimization algorithm for robot path planning[J]. Mechanical Science and Technology for Aerospace Engineering, 2022, 41(11): 1759-1764. (in Chinese) [12] 李东洁, 邱江艳, 尤波. 一种机器人轨迹规划的优化算法[J]. 电机与控制学报, 2009, 13(1): 123-127. doi: 10.3969/j.issn.1007-449X.2009.01.023LI D J, QIU J Y, YOU B. Optimal algorithm for trajectory planning of the robot[J]. Electric Machines and Control, 2009, 13(1): 123-127. (in Chinese) doi: 10.3969/j.issn.1007-449X.2009.01.023 [13] 邓伟, 张其万, 刘平, 等. 基于双种群遗传混沌优化算法的最优时间轨迹规划[J]. 计算机集成制造系统, 2018, 24(1): 101-106.DENG W, ZHANG Q W, LIU P, et al. Optimal time trajectory planning based on dual population genetic and chaotic optimization algorithm[J]. Computer Integrated Manufacturing Systems, 2018, 24(1): 101-106. (in Chinese) [14] JIN X, KANG J F, ZHANG J J, et al. Trajectory planning of a six-DOF robot based on a hybrid optimization algorithm[C]//Proceeding of the 9th International Symposium on Computational Intelligence and Design. Hangzhou, China: IEEE, 2016: 148-151. [15] 臧继元, 刁燕, 陈勇. 七自由度微创手术机器人运动学及其工作空间分析[J]. 机械设计与制造, 2010(2): 181-183. doi: 10.3969/j.issn.1001-3997.2010.02.073ZANG J Y, DIAO Y, CHEN Y. The kinematics and workspace analysis of a seven DOF minimally invasive surgical robot[J]. Machinery Design & Manufacture, 2010(2): 181-183. (in Chinese) doi: 10.3969/j.issn.1001-3997.2010.02.073 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 47
- HTML全文浏览量: 20
- PDF下载量: 0
- 被引次数: 0
