




Integrated Control of Differential Steering and Transverse Sway Stability of Vehicles on Small Curvature Roads
-
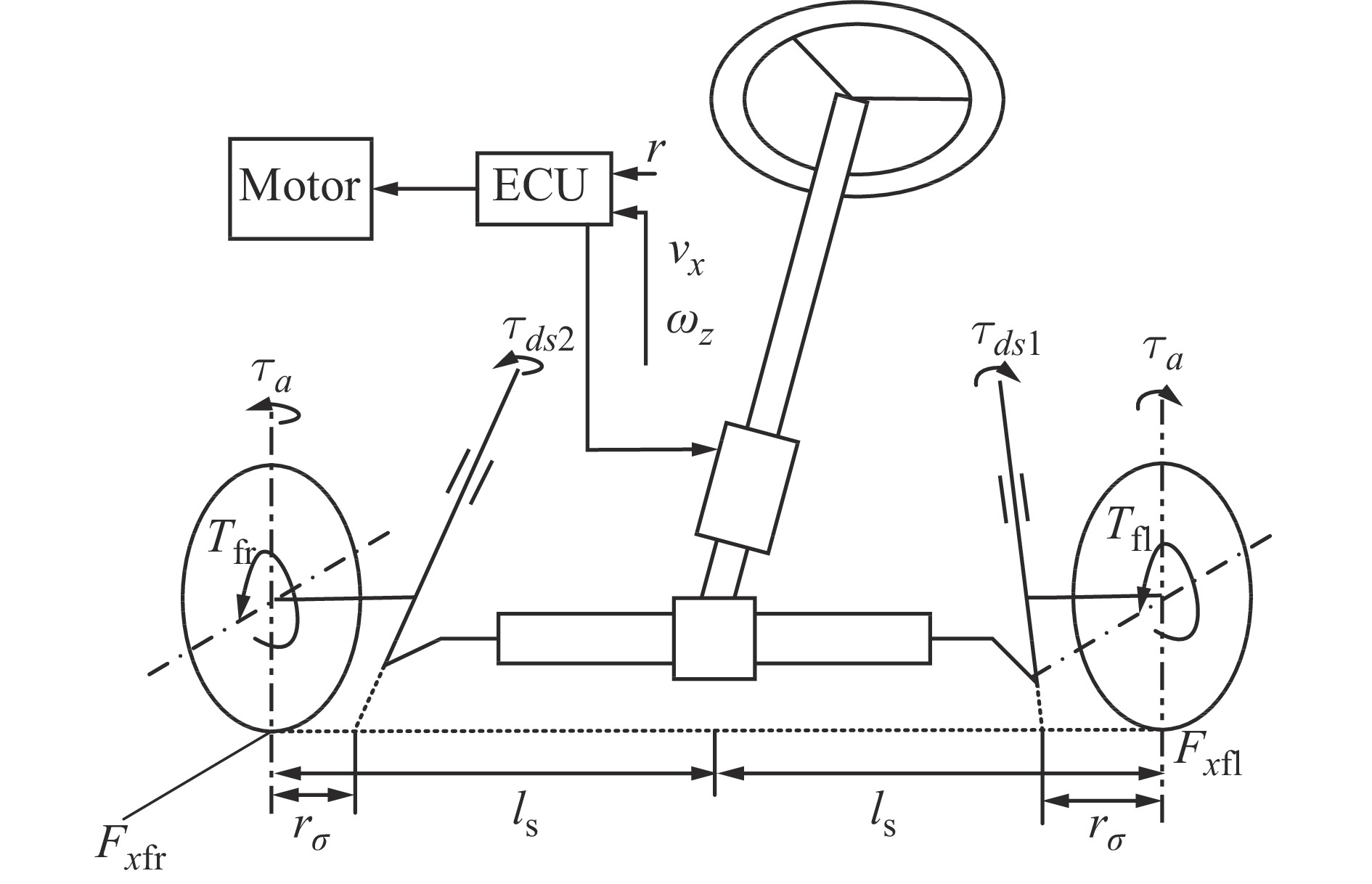
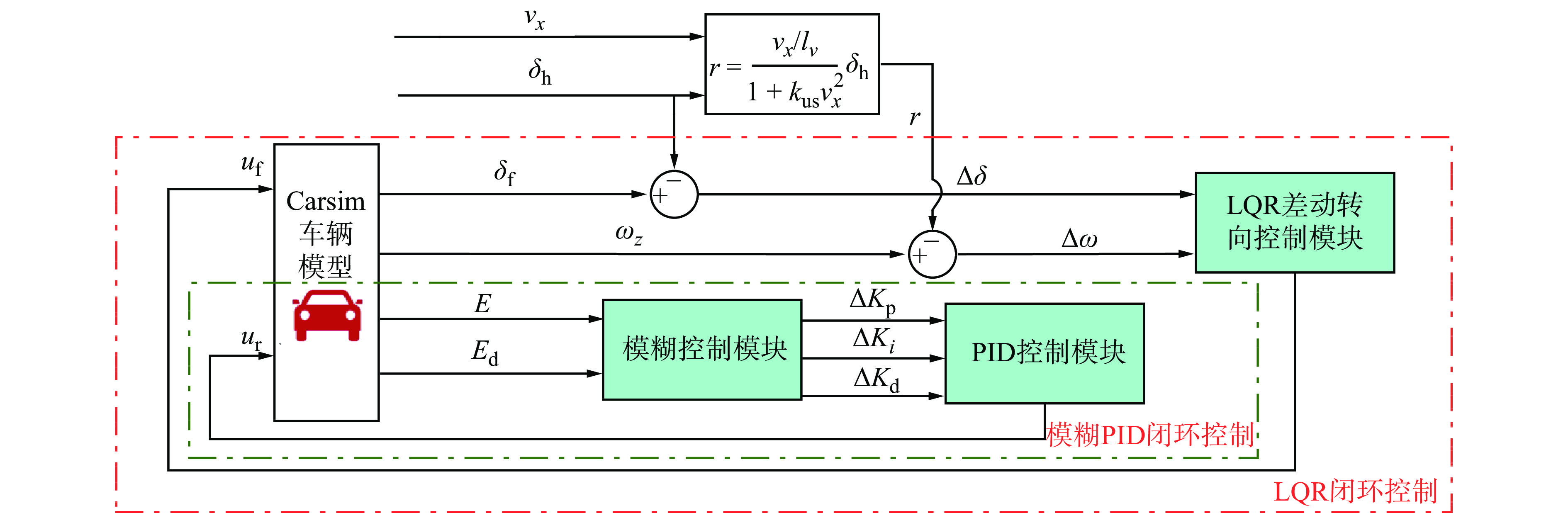
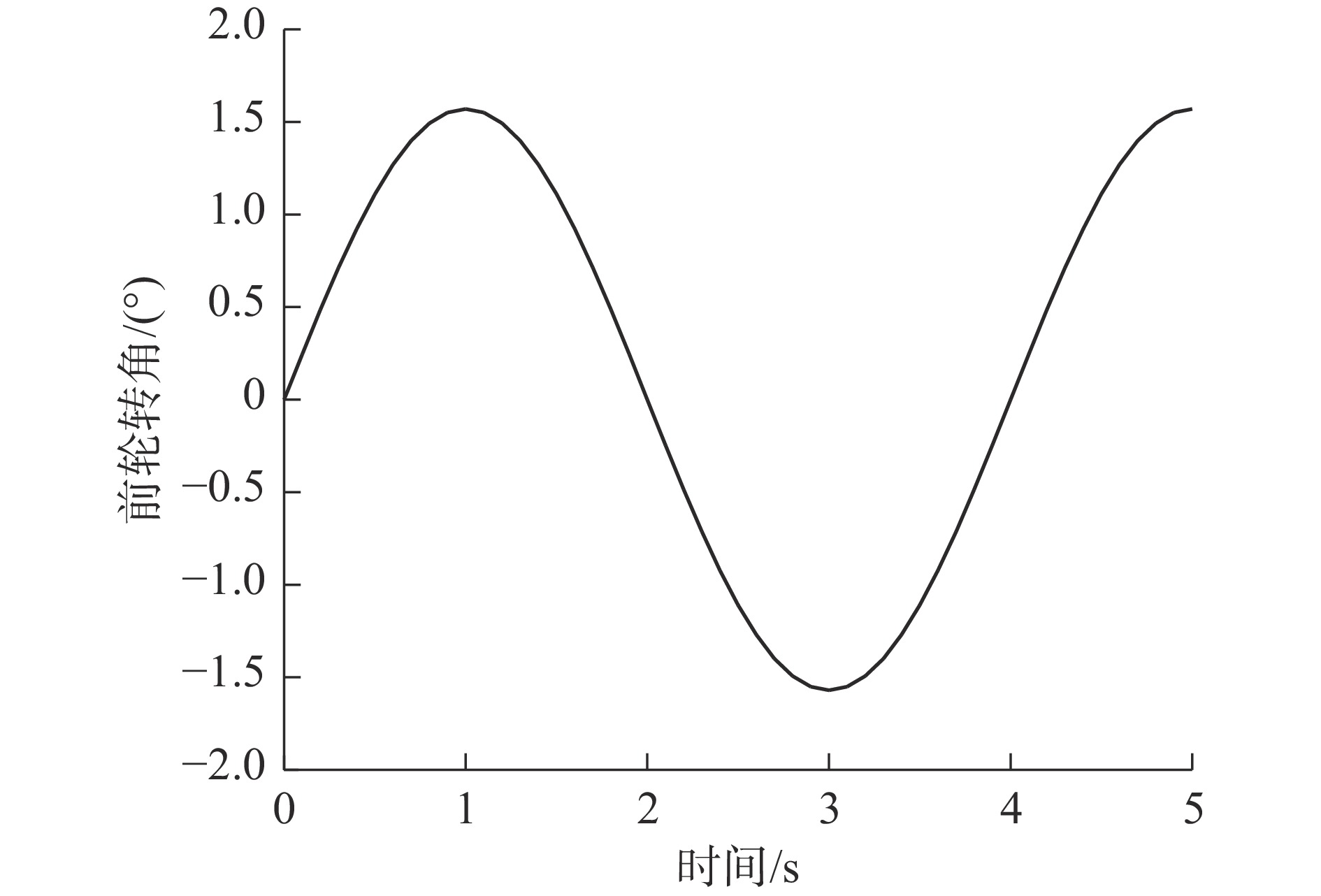
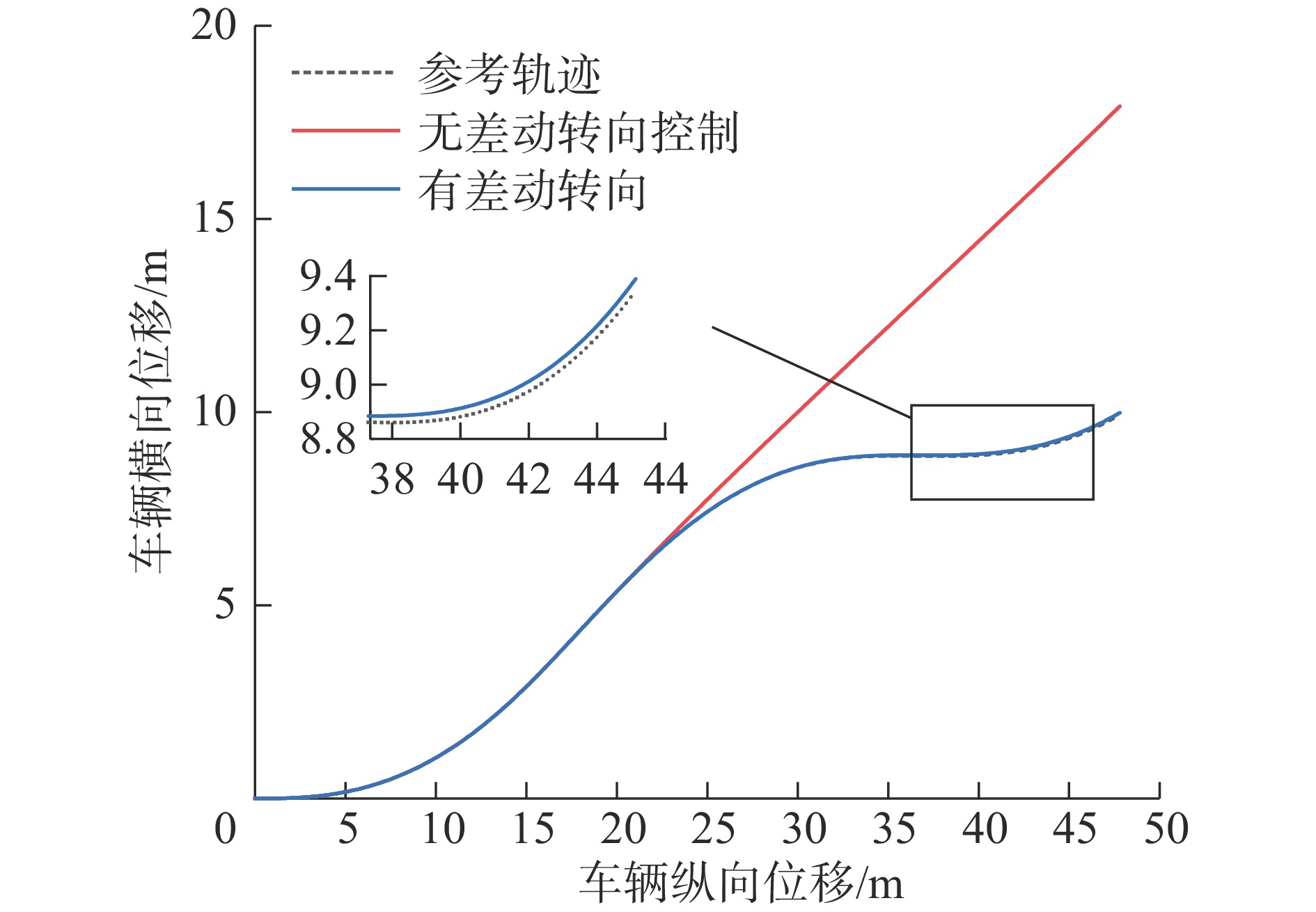
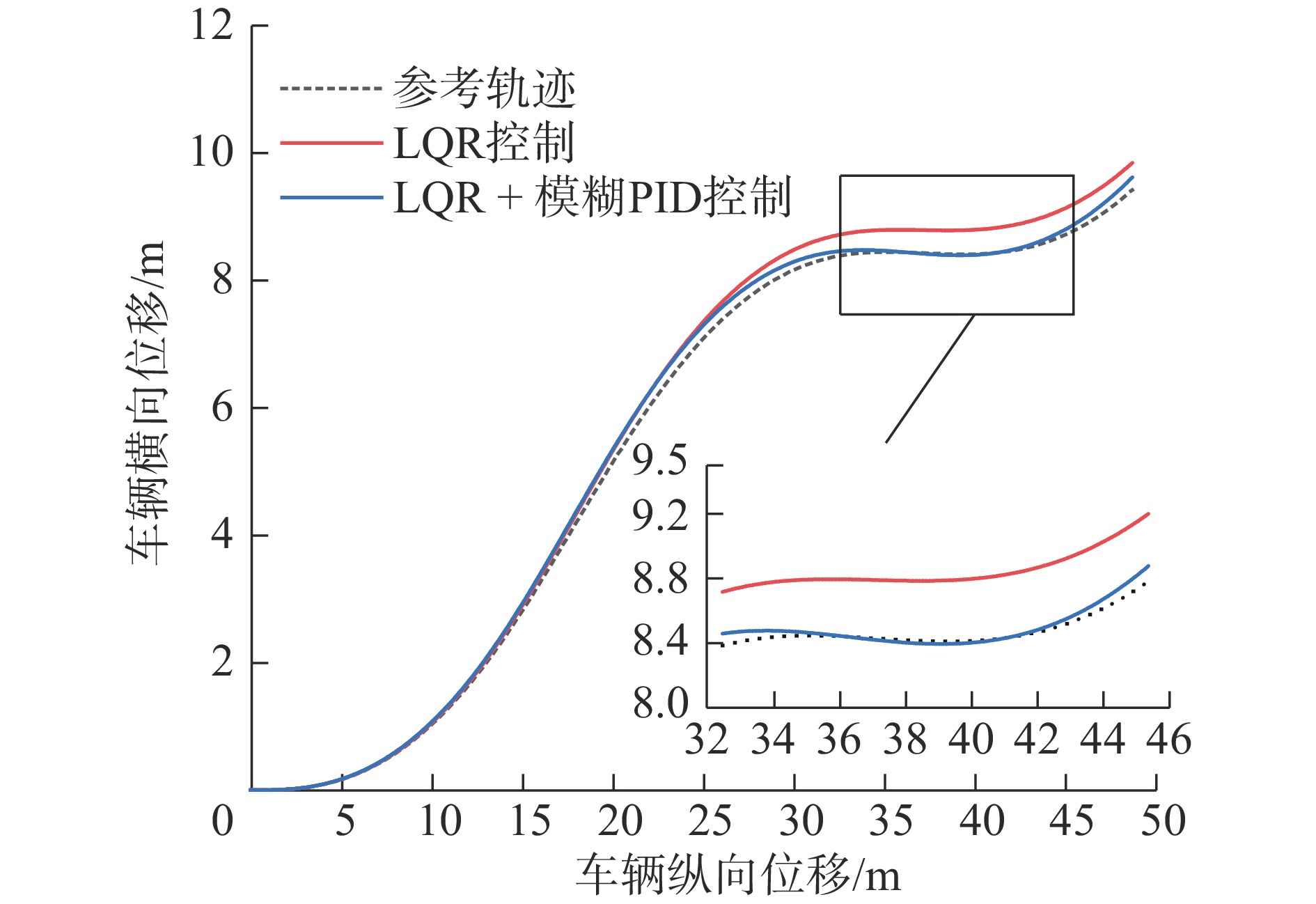
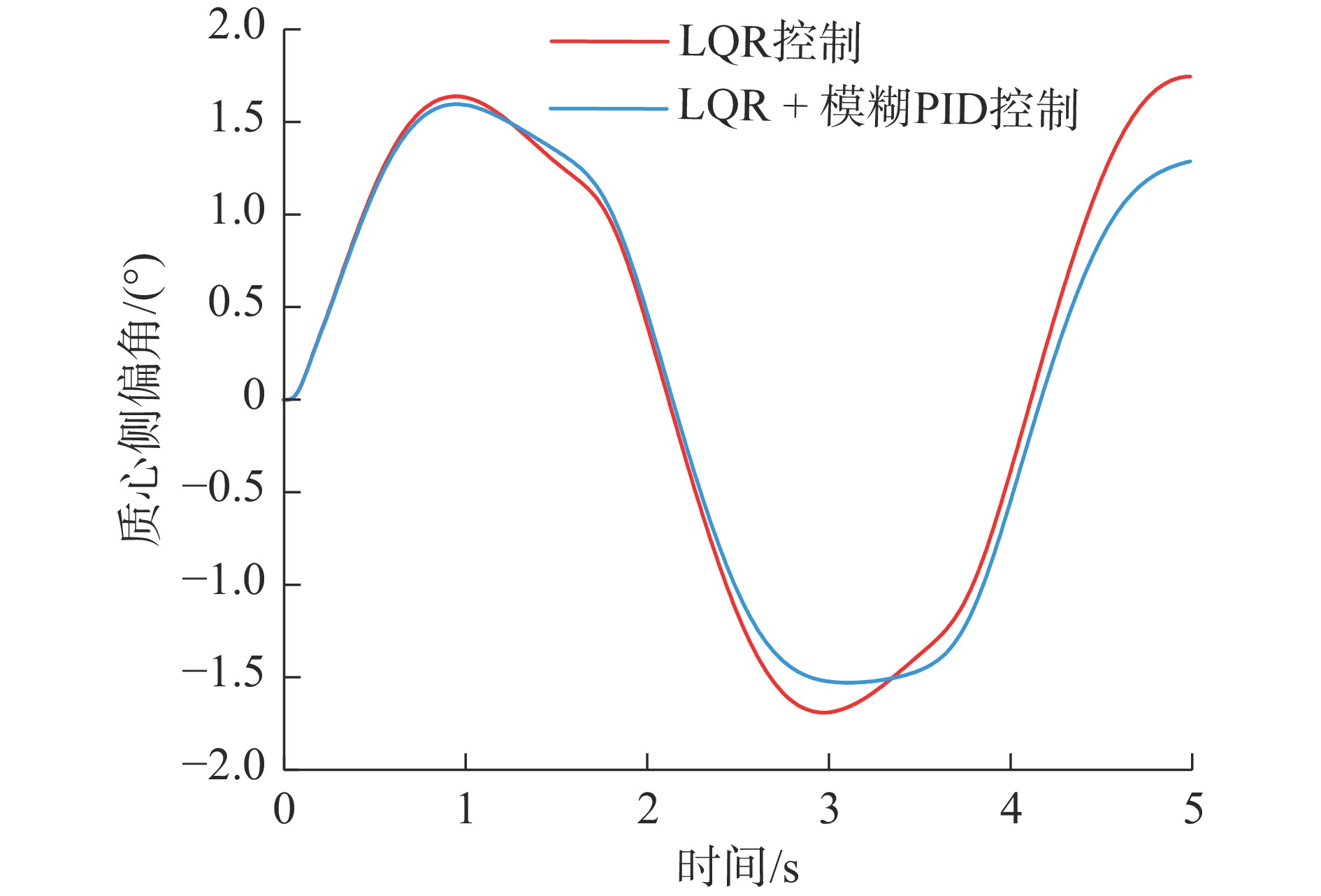
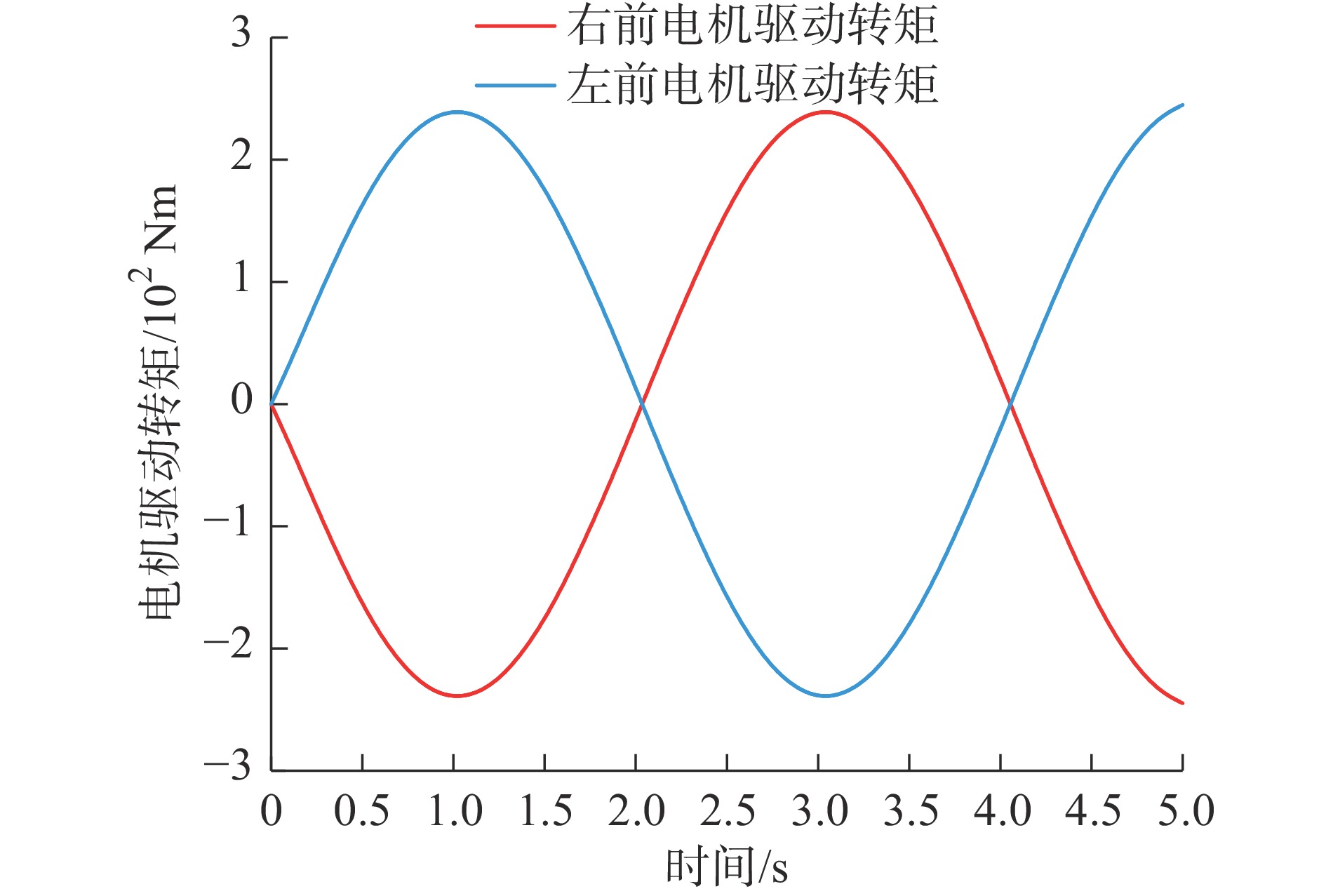
摘要: 为减小车辆在前轮转向系统失效的负面影响,保证转向系统的瞬态控制性能,本文提出差动转向控制与横向稳定性控制相结合的控制方法,通过调节左右轮毂电机转矩形成横摆力矩,实现对系统完全失效车辆的转向控制与横向稳定性控制。首先设计基于LQR差动转向控制器跟踪参考前轮转角与参考横摆角速度,保证车辆轨迹跟踪能力,然后设计基于模糊PID横向稳定性控制器跟踪参考质心侧偏角,保证车辆横摆稳定性,两者构成双闭环控制系统将控制量最终转化为横摆力矩,实现车辆的集成控制。最后通过Simulink-Carsim联合仿真验证,仿真结果表明差动转向系统能够在前轮转向系统失效情况下实现车辆转向控制,并在横向稳定性控制系统的作用下有效地提高了车辆瞬态控制性能。Abstract: In order to reduce the negative impact of vehicle failure in the front wheel steering system and ensure the transient control performance of the steering system, an integrated control method combining differential steering control and lateral stability control is proposed to realize the steering control and lateral stability control of the vehicle with complete system failure by adjusting the left and right wheel hub motor torque to form the transverse swing torque. Firstly, the LQR (Linear quadratic regulator)-based differential steering controller is designed to track the reference front wheel rotation angle and the reference transverse swing angular velocity to ensure the vehicle trajectory tracking capability, and then the fuzzy PID-based lateral stability controller is designed to track the reference mass lateral deflection angle to ensure the vehicle transverse swing stability. The two controllers above constitute a double closed-loop control system, which finally converts the control quantity into transverse swing torque to realize vehicle control. The simulation results show that the differential steering system can achieve vehicle steering control under the failure of the front wheel steering system and effectively improve the vehicle transient control performance under the action of the lateral stability control system.
-
Key words:
- electric vehicles /
- wheel motors /
- differential steering /
- trajectory tracking /
- lateral stability
-
表 1 模糊PID控制器输入输出参数
Table 1. Fuzzy PID controller input and output parameters
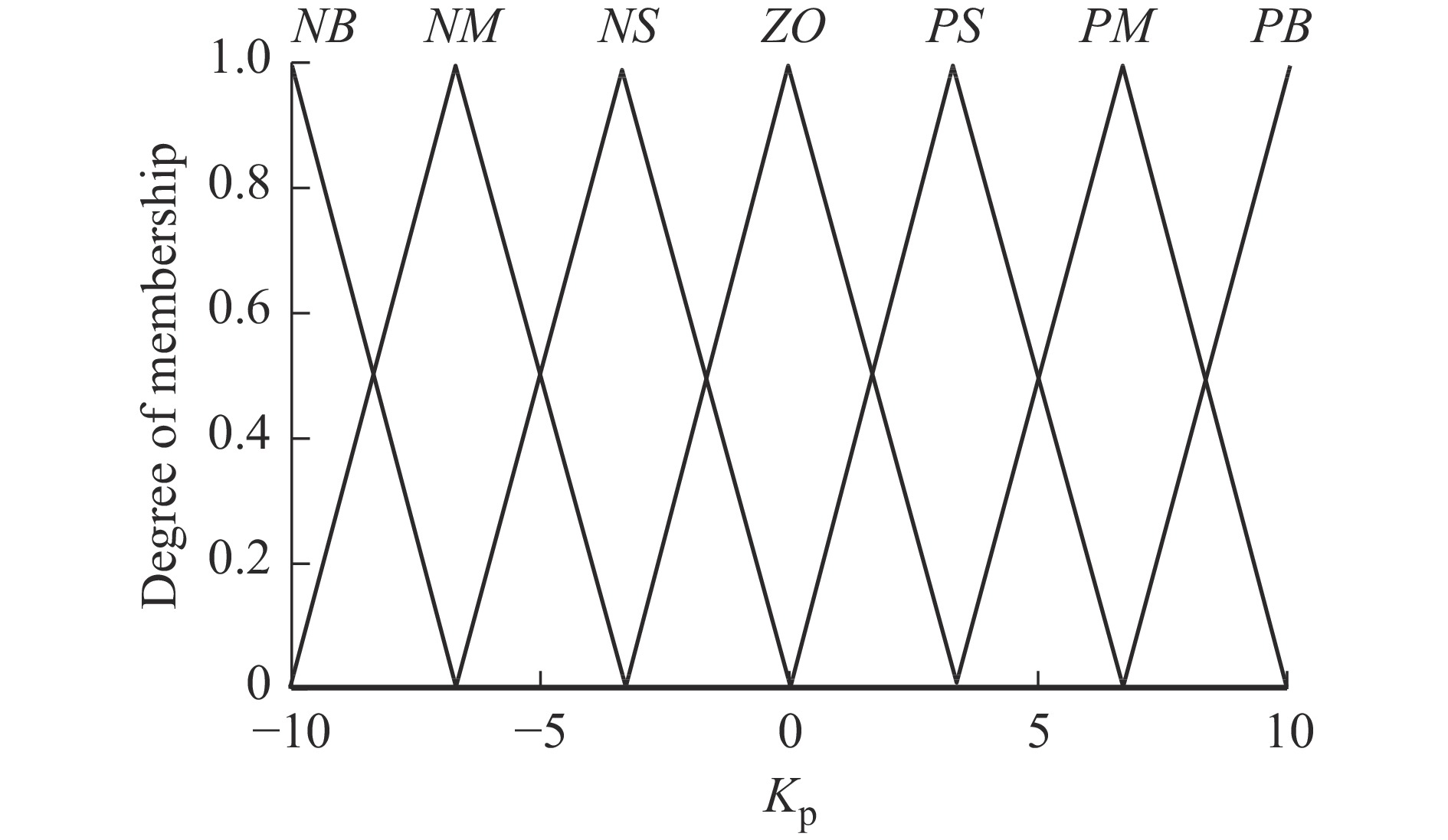
参数 模糊域 函数数量 $ {E}(t) $ $ [-2,\ 2] $ 7 $ \mathrm{d}E(t)/\mathrm{d}t $ $ [-4,\ 4] $ 7 $ \Delta K_{\rm{p}} $ $ [-10,\ 10] $ 7 $ \Delta K_{i} $ $ [-2,\ 2] $ 7 $ \Delta K_{\rm{d}} $ $ [-5,\ 5] $ 7  下载: 导出CSV
下载: 导出CSV
表 2 $ \Delta K_{\rm{p}} $模糊控制规则
Table 2. $ \Delta K_{\rm{p}} $ Fuzzy control rules
输入 Ed NB NM NS ZO PS PM PB E NB PB PB PM PM PS ZO ZO NM PB PB PM PS PS ZO NS NS PM PM PM PS ZO NS NS ZO PM PM PS ZO NS NM NM PS PS PS ZO NS NS NM NM PM PS ZO NS NM NM NM NB PB ZO ZO NM NM NM NB NB
下载: 导出CSV
表 3 $ \Delta K_{i} $模糊控制规则
Table 3. $\Delta K_{i} $ Fuzzy control rules
输入 Ed NB NM NS ZO PS PM PB E NB NB NB NM NM NS ZO ZO NM NB NB NM NS NS ZO ZO NS NB NM NS NS ZO PS PS ZO NM NM NS ZO PS PM PM PS NM NS ZO PS PS PM PB PM ZO ZO PS PS PM PB PB PB ZO ZO PS PM PM PB PB
下载: 导出CSV
表 4 $ \Delta K_{\rm{d}} $模糊控制规则
Table 4. $ \Delta K_{\rm{d}} $ Fuzzy control rules
输入 Ed NB NM NS ZO PS PM PB E NB PS NS NB NB NB NM PS NM PS NS NB NM NM NS ZO NS ZO NS NM NM NS NS ZO ZO ZO NS NS NS NS NS ZO PS ZO ZO ZO ZO ZO ZO ZO PM PB PS PS PS PS PS PB PB PB PM PM PM PS PS PB
下载: 导出CSV
表 5 仿真采用的整车参数
Table 5. Vehicle parameters used for simulation
参数 数值 整车质量$ m $ 1500 kg 绕z轴的转动惯量$ I_{\textit{z}} $ 2 000 kg·m2 有效转向阻尼$ b\mathrm{_{\rm{eff}}} $ 100 N·s/(m·rad) 轮胎接地印迹长度2$ l$ 0.1 m 轮距2$ l_{{\mathrm{s}}} $ 1.5 m 前轴至质心距离$ l_{{\mathrm{f}}} $ 1.0 m 后轴至质心距离$ l_{\rm{r}} $ 1.6 m 摩擦半径$ \gamma_{\sigma} $ 0.08 m 前轮侧偏刚度$ c_{{\mathrm{f}}} $ 80000 N/rad 后轮侧偏刚度$ c_{{\mathrm{r}}} $ 80000 N/rad 稳定性因子$ k_{\rm{us}} $ 0.001
下载: 导出CSV
-
[1] KIHM A, TROMMER S. The new car market for electric vehicles and the potential for fuel substitution[J]. Energy Policy, 2014, 73: 147-157. doi: 10.1016/j.enpol.2014.05.021 [2] BOUCHETTATA N, BOURAHLA M, GHAOUTI L. Behavior modeling and simulation of double wheeled electric vehicle drive[J]. Przegląd Elektrotechniczny, 2012, 88(10a): 218-223. [3] SATO M, YAMAMOTO G, GUNJI D, et al. Development of wireless in-wheel motor using magnetic resonance coupling[J]. IEEE Transactions on Power Electronics, 2016, 31(7): 5270-5278. doi: 10.1109/TPEL.2015.2481182 [4] HU J S, LIN X C, YIN D J, et al. Dynamic motion stabilization for front-wheel drive in-wheel motor electric vehicles[J]. Advances in Mechanical Engineering, 2015, 7(12): 1-11. doi: 10.1177/1687814015623694 [5] 陈国迎, 姚军, 王鹏, 等. 适用于后轮轮毂驱动车辆的稳定性控制策略[J]. 吉林大学学报(工学版), 2021, 51(2): 397-405. doi: 10.13229/j.cnki.jdxbgxb20191037CHEN G Y, YAO J, WANG P, et al. Stability control strategy for rear in-wheel motor drive vehicle[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(2): 397-405. (in Chinese) doi: 10.13229/j.cnki.jdxbgxb20191037 [6] 耿聪, 张欣, 姜涛, 等. 轮毂电机驱动纯电动汽车的车体侧偏角观测与稳定性控制[J]. 北京交通大学学报, 2019, 43(4): 96-101. doi: 10.11860/j.issn.1673-0291.20180144GENG C, ZHANG X, JIANG T, et al. Research on sideslip angle estimation and stability control for electric vehicle with in-wheel motors[J]. Journal of Beijing Jiaotong University, 2019, 43(4): 96-101. (in Chinese) doi: 10.11860/j.issn.1673-0291.20180144 [7] 付翔, 杨凤举, 黄斌, 等. 主动后轮转向四轮独立驱动车辆的协调控制[J]. 江苏大学学报(自然科学版), 2021, 42(5): 497-505.FU X, YANG F J, HUANG B, et al. Coordinated control of active rear wheel steering and four wheel independent driving vehicle[J]. Journal of Jiangsu University (Natural Science Edition), 2021, 42(5): 497-505. (in Chinese) [8] HU C, JING H, WANG R R, et al. Robust H∞ output-feedback control for path following of autonomous ground vehicles[J]. Mechanical Systems and Signal Processing, 2016, 70-71: 414-427. doi: 10.1016/j.ymssp.2015.09.017 [9] 王庆年, 王军年, 宋世欣, 等. 差动助力转向系统离线仿真验证[J]. 汽车工程, 2009, 31(6): 545-551. doi: 10.3321/j.issn:1000-680X.2009.06.014WANG Q N, WANG J N, SONG S X, et al. Validation of differential drive assisted steering system by off-line simulation[J]. Automotive Engineering, 2009, 31(6): 545-551. (in Chinese) doi: 10.3321/j.issn:1000-680X.2009.06.014 [10] YAN C, WANG Y M. Design and evaluation on electric differentials for overactuated electric ground vehicles with four independent in-wheel motors[J]. IEEE Transactions on Vehicular Technology, 2012, 61(4): 1534-1542. doi: 10.1109/TVT.2012.2187940 [11] 王军年. 电动轮独立驱动汽车差动助力转向技术研究[D]. 长春: 吉林大学, 2009.WANG J N. Study on differential drive assist steering technology for electric vehicle with independent-motorized-wheel-drive[D]. Changchun: Jilin University, 2009. (in Chinese) [12] 李隐卓. 电动轮驱动汽车驱动助力转向理论及动力学控制研究[D]. 长春: 吉林大学, 2007.LI Y Z. Driving-power steering theory and VDC research of motorized wheels driving vehicle[D]. Changchun: Jilin University, 2007. (in Chinese) [13] 龚建伟, 姜岩, 徐威. 无人驾驶车辆模型预测控制[M]. 北京: 北京理工大学出版社, 2014.GONG J W, JIANG Y, XU W. Model predictive control for self-driving vehicles[M]. Beijing: Beijing Institute of Technology Press, 2014. (in Chinese) [14] AHN C, PENG H, TSENG H E. Robust estimation of road frictional coefficient[J]. IEEE Transactions on Control Systems Technology, 2013, 21(1): 1-13. doi: 10.1109/TCST.2011.2170838 [15] 丁海涛, 郭孔辉, 陈虹. 汽车稳定性控制中横摆力矩决策的LQR方法[J]. 吉林大学学报(工学版), 2010, 40(3): 597-601. doi: 10.13229/j.cnki.jdxbgxb2010.03.024DING H T, GUO K H, CHEN H. LQR method for vehicle yaw moment decision in vehicle stability control[J]. Journal of Jilin University (Engineering and Technology Edition), 2010, 40(3): 597-601. (in Chinese) doi: 10.13229/j.cnki.jdxbgxb2010.03.024 [16] LIN F, WANG S B, ZHAO Y Q, et al. Research on autonomous vehicle path tracking control considering roll stability[J]. Proceedings of the Institution of Mechanical Engineers, 2020, 235(1): 095440702094200. doi: 10.1177/0954407020942006 -


 点击查看大图
点击查看大图
计量
- 文章访问数: 103
- HTML全文浏览量: 23
- PDF下载量: 8
- 被引次数: 0
