




Research on Lateral Tracking Control of Autonomous Vehicles
-
摘要: 使用传统模型预测控制对车辆轨迹进行跟踪时,模型中的路面附着系数往往为特定工况下的经验数值。当车辆在未知路面行驶时,现有控制算法难以对路面附着系数进行及时修正,并调整预测控制模型内的约束,进而导致车辆横向失稳。针对此种情况,提出一种考虑实时路面附着系数估计的横向跟踪控制策略,用于实现车辆横向轨迹跟踪。该算法针对路面附着系数未知的工况,利用车辆当前横纵向加速度、横摆角速度、前轮转角等状态量,通过扩展卡尔曼滤波预测路面附着系数后,再对控制模型中的侧偏角约束量进行实时调整,以保证车辆在未知路面工况下的行驶安全,使车辆跟随预期轨迹行驶。实验表明,将扩展卡尔曼滤波法与模型预测控制结合的控制算法具有可行性,且有效提高了车辆在不同附着系数路面行驶时横向轨迹跟踪的稳定性及鲁棒性。Abstract: The traditional model predictive control method is used to track the vehicle trajectory, the road adhesion coefficient in the model is often fixed as the empirical value of the current road. When the vehicle is driving on unknown road, it is difficult to adjust the inboard constraint of predictive control model in real time, and it is difficult to correct the road adhesion coefficient in time, which leads to vehicle lateral instability. In this paper, a model predictive control algorithmconsidering real-time road adhesion coefficient is proposed to realize trajectory tracking. Under the condition of unknown road friction coefficient, the algorithm predicts the road adhesion coefficient through the vehicle's current transverse and longitudinal acceleration, yaw rate, front wheel angle and other state variables, and adjusts the yaw angle constraint in the control model in real time. Even under the unknown road surface, it can provide redundant protection for vehicle control and ensure the vehicle to follow the expected trajectory.
-
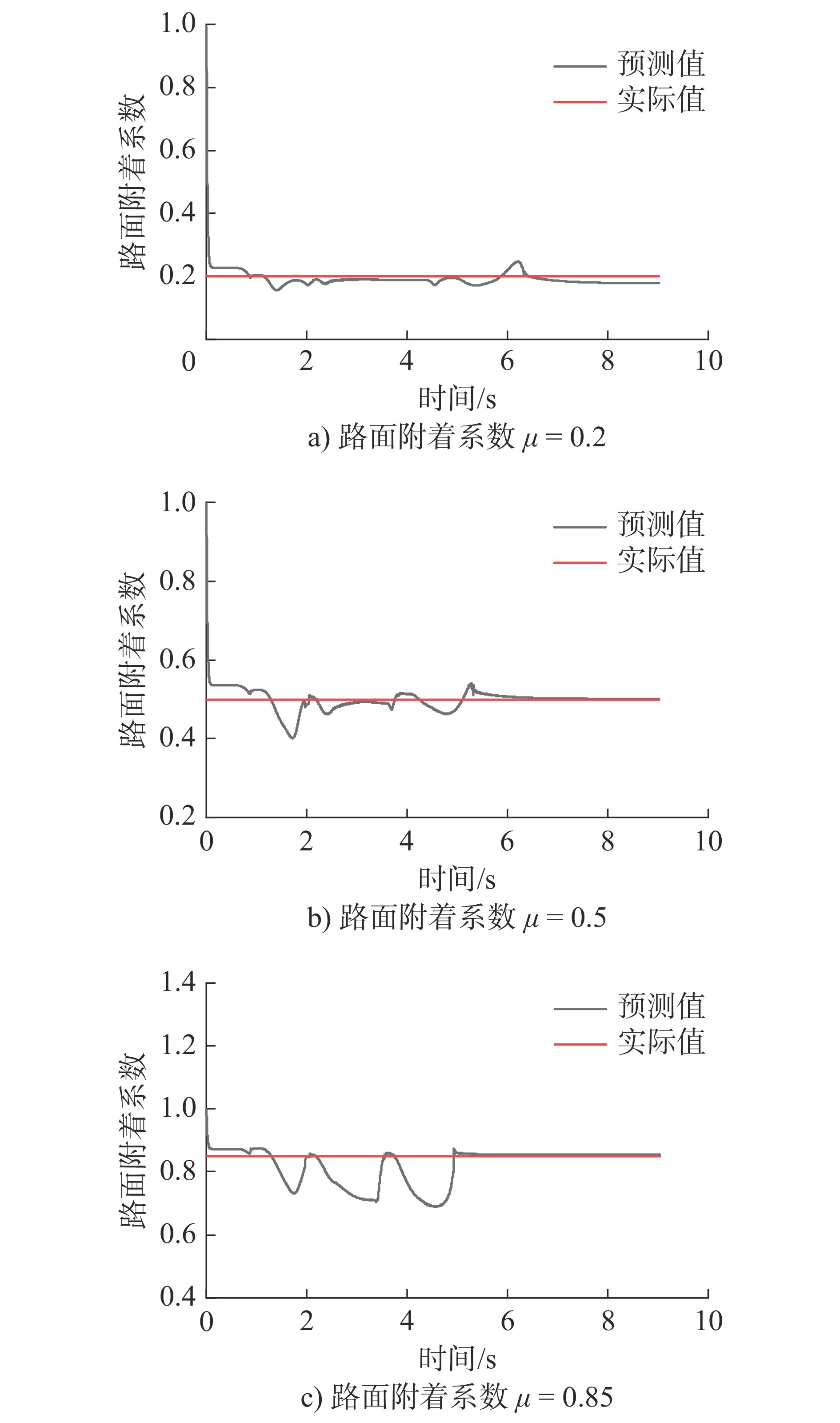
图 2 扩展卡尔曼预测结果
Figure 2. Extended Kalman prediction results of road adhesion coefficient
表 1 方程式车主要参数
Table 1. Main parameters of formula vehicle
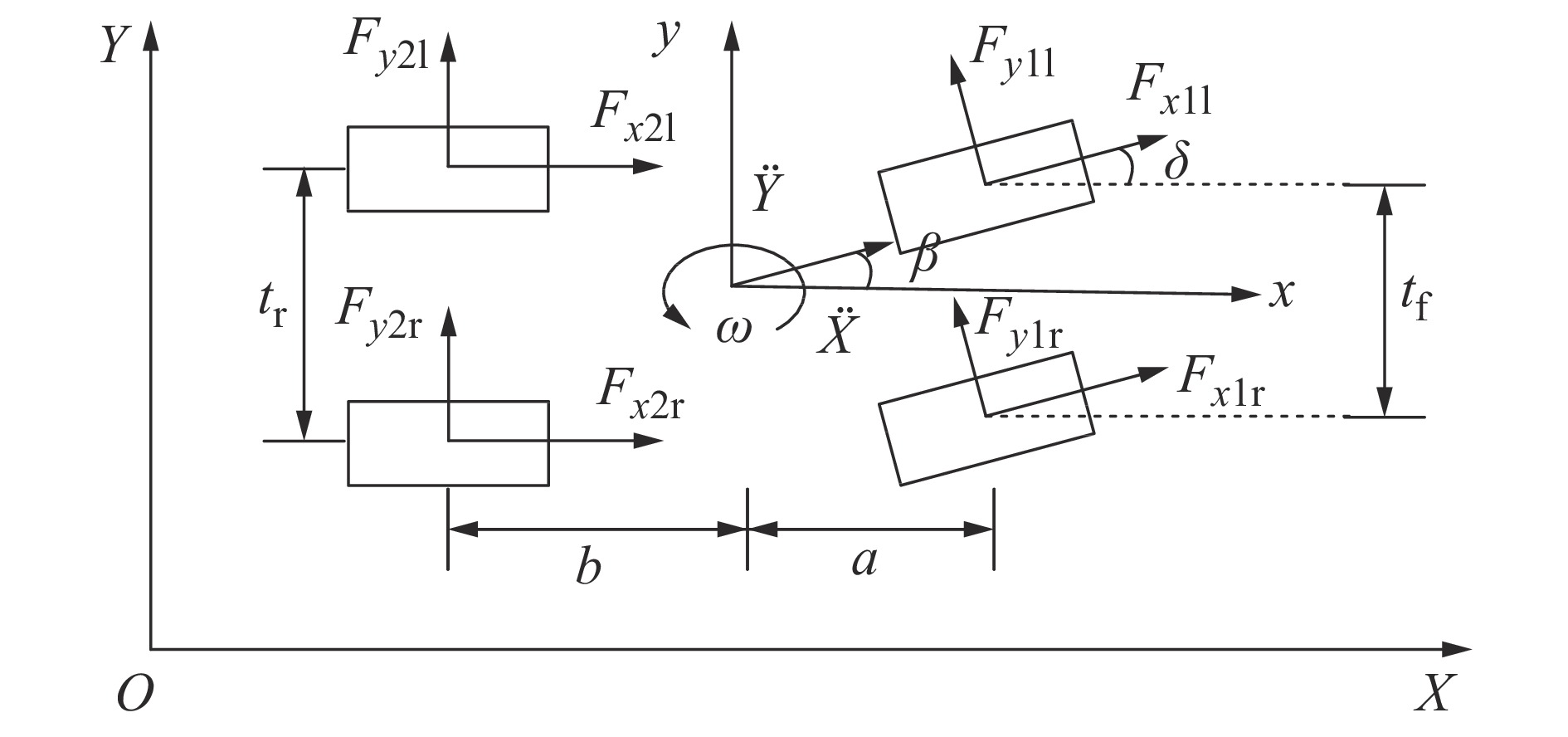
参数名称 数值 整车质量m/kg 250 质心到前轴距离a/m 0.995 质心到后轴距离b/m 0.665 前轮距tf /m 1.27 后轮距tr /m 1.28 轮胎滚动半径RW/m 0.228 横摆转动惯量Iz/(kg·m2) 1410 轮胎侧偏刚度Cy/(N·rad−1) 32000  下载: 导出CSV
下载: 导出CSV
表 2 侧偏角与路面附着系数对应关系
Table 2. Lateral deviation angle and road adhesion coefficient correspondence
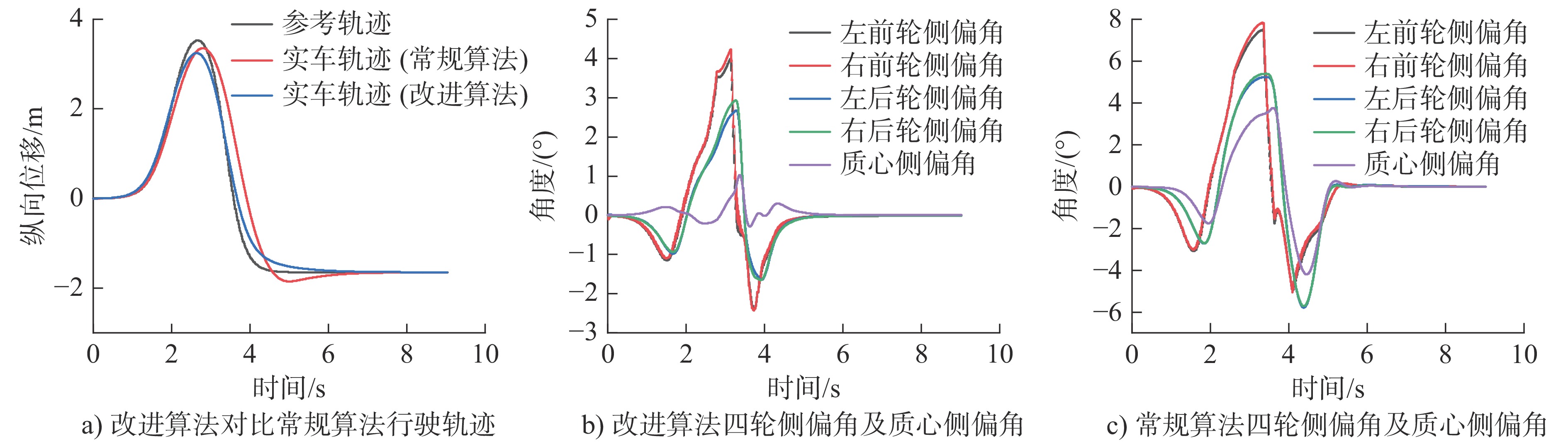
附着系数μ 侧偏角约束β/(°) 0.2 2.2 0.5 5.5 0.85 9.4
下载: 导出CSV
-
[1] MAYNE D Q. Model predictive control: recent developments and future promise[J]. Automatica, 2014, 50(12): 2967-2986. doi: 10.1016/j.automatica.2014.10.128 [2] 李想, 曾春年, 罗杰, 等. 基于线性二次型最优控制的自适应巡航控制算法研究[J]. 武汉理工大学学报(信息与管理工程版), 2019, 41(2): 191-196.LI X, ZENG C N, LUO J, et al. Research on adaptive cruise control algorithm based on linear quadratic optimal control[J]. Journal of Wuhan University of Technology (Information & Management Engineering), 2019, 41(2): 191-196. (in Chinese) [3] 何德峰, 崔靖龙, 何文韬. 自主车辆高效多目标预测巡航控制[J]. 浙江工业大学学报, 2020, 48(4): 355-360.HE D F, CUI J L, HE W T. Efficient multi-objective predictive cruise control of autonomous vehicles[J]. Journal of Zhejiang University of Technology, 2020, 48(4): 355-360. (in Chinese) [4] 张航星, 路永婕, 张俊宁. 基于非线性车辆模型的行驶状态与路面附着系数估计[J]. 石家庄铁道大学学报(自然科学版), 2020, 33(1): 49-58. doi: 10.13319/j.cnki.sjztddxxbzrb.20180626001ZHANG H X, LU Y J, ZHANG J N. Vehicle state and road surface adhesion coefficient estimation based on nonlinear model[J]. Journal of Shijiazhuang Tiedao University (Natural Science Edition), 2020, 33(1): 49-58. (in Chinese) doi: 10.13319/j.cnki.sjztddxxbzrb.20180626001 [5] 刘志强, 刘逸群. 路面附着系数的自适应衰减卡尔曼滤波估计[J]. 中国公路学报, 2020, 33(7): 176-185. doi: 10.19721/j.cnki.1001-7372.2020.07.018LIU Z Q, LIU Y Q. Estimation algorithm for road adhesion coefficient using adaptive fading unscented Kalman filter[J]. China Journal of Highway and Transport, 2020, 33(7): 176-185. (in Chinese) doi: 10.19721/j.cnki.1001-7372.2020.07.018 [6] 李绪龙. 基于路面附着系数的汽车防碰撞控制算法研究[D]. 合肥: 合肥工业大学, 2018.LI X L. Research on vehicle anti-collision control algorithm based on road adhesion coefficient[D]. Hefei: Hefei University of Technology, 2018. (in Chinese) [7] 杨秀建, 李金雨, 张昆, 等. 基于路面附着系数估计的车辆自适应巡航控制研究[J]. 南京理工大学学报, 2018, 42(4): 466-473. doi: 10.14177/j.cnki.32-1397n.2018.42.04.012YANG X J, LI J Y, ZHANG K, et al. Vehicular adaptive cruise control based on road adhesive coefficient estimation[J]. Journal of Nanjing University of Science and Technology, 2018, 42(4): 466-473. (in Chinese) doi: 10.14177/j.cnki.32-1397n.2018.42.04.012 [8] 张向文, 王飞跃, 高彦臣. 轮胎稳态模型的分析综述[J]. 汽车技术, 2012(6): 1-7.ZHANG X W, WANG F Y, GAO Y C. Analysis and review of tire steady state models[J]. Automobile Technology, 2012(6): 1-7. (in Chinese) [9] 龚建伟, 姜岩, 徐威. 无人驾驶车辆模型预测控制[M]. 北京: 北京理工大学出版社, 2014.GONG J W, JIANG Y, XU W. Model predictive control for self-driving vehicles[M]. Beijing: Beijing Institute of Technology Press, 2014. (in Chinese) [10] 张晨晨, 夏群生, 何乐. 质心侧偏角对车辆稳定性影响的研究[J]. 汽车工程, 2011, 33(4): 277-282. doi: 10.19562/j.chinasae.qcgc.2011.04.001ZHANG C C, XIA Q S, HE L. A study on the influence of sideslip angle at mass center on vehicle stability[J]. Automotive Engineering, 2011, 33(4): 277-282. (in Chinese) doi: 10.19562/j.chinasae.qcgc.2011.04.001 [11] FALCONE P. Nonlinear model predictive control for autonomous vehicles[J]. 2007. [12] XIAO L Y, GAO F. A comprehensive review of the development of adaptive cruise control systems[J]. Vehicle System Dynamics, 2010, 48(10): 1167-1192. doi: 10.1080/00423110903365910 [13] MAYNE D Q. Model predictive control: recent developments and future promise[J]. Automatica, 2014, 50(12): 2967-2986. [14] 周兵, 邱香, 吴晓建, 等. 基于UKF车辆状态及路面附着系数估计的AFS控制[J]. 湖南大学学报(自然科学版), 2019, 46(8): 1-8. doi: 10.16339/j.cnki.hdxbzkb.2019.08.001ZHOU B, QIU X, WU X J, et al. AFS control based on estimation of vehicle state and road coefficient using UKF method[J]. Journal of Hunan University (Natural Sciences), 2019, 46(8): 1-8. (in Chinese) doi: 10.16339/j.cnki.hdxbzkb.2019.08.001 [15] LI Q X, LIU L J, YUAN X F. Model predictive controller-based optimal slip ratio control system for distributed driver electric vehicle[J]. Mathematical Problems in Engineering, 2020, 2020: 8086590. -

 点击查看大图
点击查看大图
图(6) / 表(2)
计量
- 文章访问数: 95
- HTML全文浏览量: 19
- PDF下载量: 34
- 被引次数: 0
