




Study on LuGre Model for Friction Compensation of Dual-valve Pneumatic Servo System
-
摘要: 由于摩擦会引起气动位置伺服系统的动态滞后,尤其是气缸活塞在换向过程中容易产生"平顶"现象,因此需要对气动系统进行摩擦补偿。但是由于气动系统本身的参数不确定性和强非线性会影响摩擦补偿的效果,同时气缸两腔耦合与流量饱和会导致控制系统的自由度不高且能量损失较大。针对以上问题,文中采用表征摩擦动态特性良好的LuGre模型来描述气缸摩擦并提出了一种自适应鲁棒控制器进行摩擦补偿,控制器的自适应部分用于控制参数不确定性,鲁棒控制部分用来处理系统的非线性。同时采用两个三位四通比例阀来提高控制自由度并降低能量耗散。仿真结果表明:该补偿策略有效改善了摩擦带来的动态滞后,提高了系统的响应速度与跟踪精度。Abstract: Because the pneumatic position servo friction will cause the dynamic hysteresis of the system, especially the cylinder piston is prone to "flat top" phenomenon in the commutation process, so it is necessary to compensate the friction for the pneumatic system. However, due to the parameter uncertainties and strong nonlinearities of the pneumatic system, the effect of the friction compensation will be reduced. System is subjected to coupling of the two chambers of the cylinder and saturation of gas flow, which will cause the control system to have a low degree of freedom, and a large energy loss. In response to the above problems, the LuGre model is used to characterize the friction dynamics well, to describe the cylinder friction and propose an adaptive robust controller for friction compensation. The adaptive part of the controller is used to control parameter uncertainties. The robust part is used to deal with the nonlinearities of the system. Two three-position four-way proportional valves are applied to increase the control degrees of freedom and reduce the energy dissipation. The simulation illustrate that the compensation strategy effectively improves the dynamic lag, and improves the dynamic response and tracking accuracy of the system.
-
Key words:
- friction compensation /
- dynamic hysteresis /
- pneumatic position servo /
- adaptive robust /
- dual valve /
- LuGre model
-

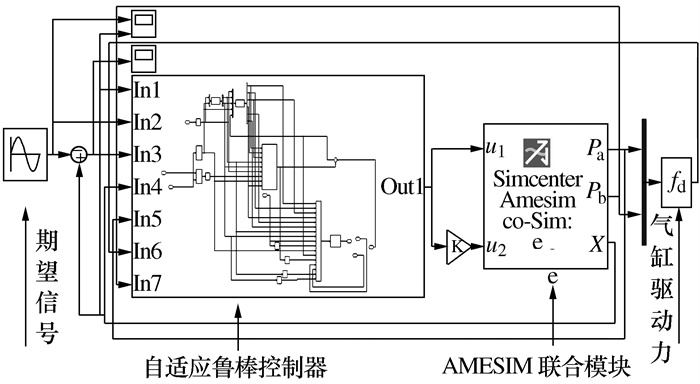
图 1 阀口自适应鲁棒控制器结构图
Figure 1. Diagram of the adaptive robust controller structure of a valve port
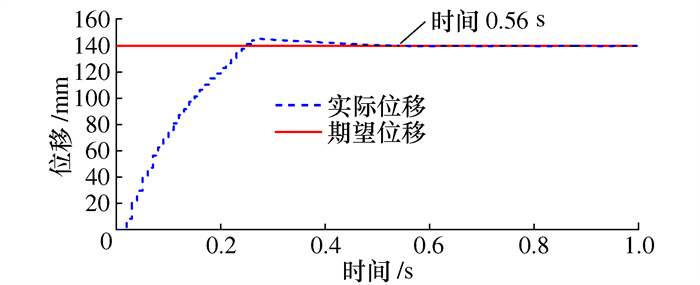
图 4 自适应鲁棒控制的单阀气动伺服系统阶跃响应
Figure 4. Step response of an adaptive robustly controlled single-valve pneumatic servo system

图 5 自适应鲁棒控制的双阀气动伺服系统阶跃响应
Figure 5. Step response of an adaptive robustly controlled two-valve pneumatic servo system
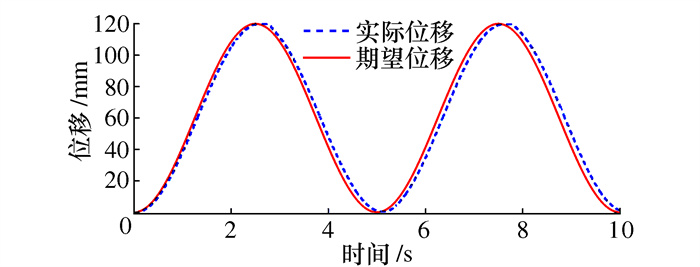
图 6 PID控制的双阀气动伺服系统的位置跟踪
Figure 6. Position tracking of a PID-controlled two-valve pneumatic servo system
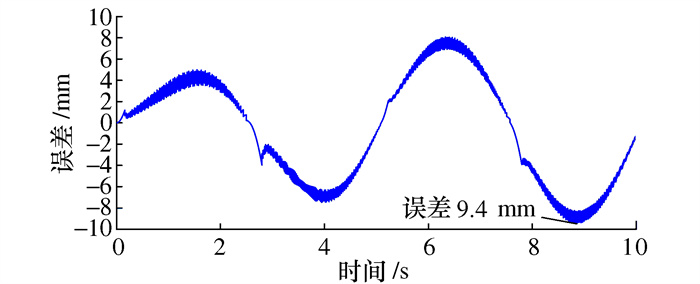
图 7 PID控制的双阀气动伺服系统的位置跟踪误差
Figure 7. Position tracking error of a PID-controlled two-valve pneumatic servo system
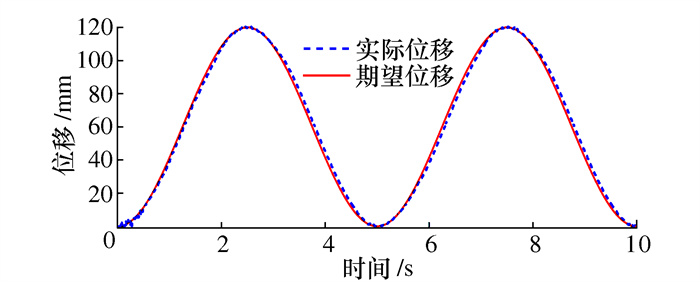
图 8 自适应鲁棒控制的单阀气动伺服系统的位置跟踪
Figure 8. Position tracking of an adaptive robustly controlled single-valve pneumatic servo system

图 9 自适应鲁棒控制的单阀气动伺服系统的位置跟踪误差
Figure 9. Position tracking error of an adaptive robustly controlled single-valve pneumatic servo system
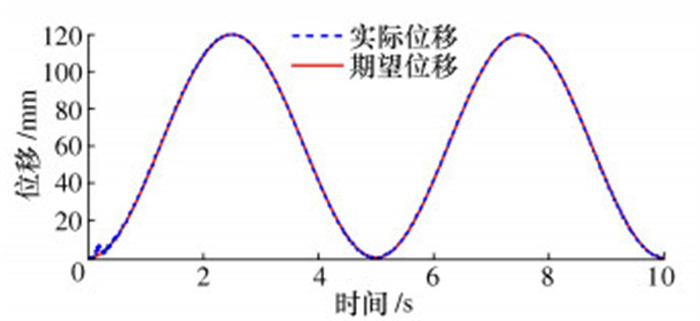
图 10 自适应鲁棒控制的双阀气动伺服系统的位置跟踪
Figure 10. Position tracking of an adaptive robustly controlled two-valve pneumatic servo system
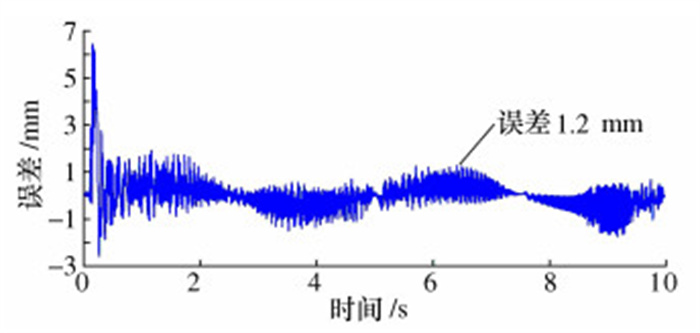
图 11 自适应鲁棒控制的双阀气动伺服系统的位置跟踪误差
Figure 11. Position tracking error of an adaptive robustly controlled double-valve pneumatic servo system
表 1 联合仿真系统参数
Table 1. Parameters of joint simulation system
系统参数 数值 M/kg 0.5 ρ/mm 20 γ 1.4 Aa/m2 3.116×10-3 Ab/m2 2.810 1×10-3 Va0/m3 2.4×10-5 ps/Pa 6.53×105 p0/Pa 1×105 R/[m·(kg·K-1)] 287 L/m 0.16 n 1.35 Fs/N 12 Fc/N 10 vs/(m·s-1) 0.01 σ0/Nm 50 000 σ1/(m·s-1) 2 B/(m·s-1) 5 k1 100 k2 30 k3 200 h2(t) 21 h3(t) 30 η2 4 η3 1 γ0 0.2 γ1 0.2 Γ diag{106, 103, 103, 102, 102, 102}  下载: 导出CSV
下载: 导出CSV
-
[1] 魏琼, 焦宗夏, 吴帅, 等. 气动伺服加载系统的非线性复合控制[J]. 机械工程学报, 2017, 53(14): 217-224. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201714026.htmWEI Q, JIAO Z X, WU S, et al. Nonlinear compound control of pneumatic servo loading system[J]. Journal of Mechanical Engineering, 2017, 53(14): 217-224. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201714026.htm [2] 刘昱, 王安, 刘昌龙, 等. 自抗扰控制器的无摩擦气缸控制研究[J]. 机械设计与制造, 2020(6): 11-15. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ202006005.htmLIU Y, WANG A, LIU C L, et al. Research on active disturbance rejection control for frictionless cylinder[J]. Machinery Design & Manufacture, 2020(6): 11-15. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ202006005.htm [3] 魏琼, 焦宗夏, 王君, 等. 基于LuGre模型的气动位置伺服系统摩擦补偿控制[J]. 机械工程学报, 2018, 54(20): 131-138. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201820016.htmWEI Q, JIAO Z X, WANG J, et al. Control of pneumatic position servo with LuGre model-based friction compensation[J]. Journal of Mechanical Engineering, 2018, 54(20): 131-138. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201820016.htm [4] 夏鹏. 基于振动减摩原理的低摩擦气缸及其运动轨迹跟踪控制[D]. 镇江: 江苏大学, 2020.XIA P. A low friction pneumatic cylinder based on vibration friction reduction theory and its motion tracking control[D]. Zhenjiang: Jiangsu University, 2020. (in Chinese) [5] 梁定坤, 陈轶珩, 孙宁, 等. 气动人工肌肉驱动的机器人控制方法研究现状概述[J]. 控制与决策, 2021, 36(1): 27-41. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC202101002.htmLIANG D K, CHEN Y H, SUN N, et al. Overview of control methods for pneumatic artificial muscle-actuated robots[J]. Control and Decision, 2021, 36(1): 27-41. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC202101002.htm [6] 吴昌文, 朱玉川, 高强. 高速开关阀控气动位置伺服系统的模糊自适应PID控制[J]. 液压与气动, 2021, 45(3): 47-53. https://www.cnki.com.cn/Article/CJFDTOTAL-YYYQ202103007.htmWU C W, ZHU Y C, GAO Q. Fuzzy adaptive PID control of pneumatic position servo system using high-speed on/off valves[J]. Chinese Hydraulics & Pneumatics, 2021, 45(3): 47-53. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YYYQ202103007.htm [7] 曹晓明, 姚静. 负载口独立控制负载模拟系统多余力解耦补偿抑制控制[J]. 锻压技术, 2021, 46(7): 157-165. https://www.cnki.com.cn/Article/CJFDTOTAL-DYJE202107033.htmCAO X M, YAO J. Redundant force decoupling compensation suppression control for load simulation system with independent metering control[J]. Forging & Stamping Technology, 2021, 46(7): 157-165. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DYJE202107033.htm [8] 张鹏, 郭志军. 节流独立控制负载敏感液压系统特性及其仿真分析[J]. 液压与气动, 2021, 45(4): 82-86. https://www.cnki.com.cn/Article/CJFDTOTAL-YYYQ202104015.htmZHANG P, GUO Z J. Characteristics and simulation analysis of load sensitive hydraulic system with independent throttle control[J]. Chinese Hydraulics & Pneumatics, 2021, 45(4): 82-86. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YYYQ202104015.htm [9] 王涛, 刘毅, 黄方平, 等. 负载口独立控制双联阀建模与特性分析[J]. 液压与气动, 2019(10): 11-19. https://www.cnki.com.cn/Article/CJFDTOTAL-YYYQ201910002.htmWANG T, LIU Y, HUANG F P, et al. Modeling and characteristic analysis of independent metering control twin-valve[J]. Chinese Hydraulics & Pneumatics, 2019(10): 11-19. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YYYQ201910002.htm [10] 史得力. 气压位置伺服系统摩擦力因素影响及抑制研究[D]. 哈尔滨: 哈尔滨工业大学, 2011.SHI D L. Research on the impact and suppression of the cylinder friction in pneumatic position servo system[D]. Harbin: Harbin Institute of Technology, 2011. (in Chinese) [11] FREIDOVICH L, ROBERTSSON A, SHIRIAEV A, et al. LuGre-model-based friction compensation[J]. IEEE Transactions on Control Systems Technology, 2010, 18(1): 194-200. [12] 焦珊珊. 气动位置伺服系统神经网络控制方法研究[D]. 西安: 西安理工大学, 2021.JIAO S S. Neural network control of pneumatic position servo system[D]. Xi'an: Xi'an University of Technology, 2021. (in Chinese) [13] 魏军辉, 冯昌林, 张俊. 舰炮随动系统的模糊滑模控制[J]. 兵工自动化, 2019, 38(10): 93-96. https://www.cnki.com.cn/Article/CJFDTOTAL-BGZD201910021.htmWEI J H, FENG C L, ZHANG J. Fuzzy sliding mode control for naval-gun servo system[J]. Ordnance Industry Automation, 2019, 38(10): 93-96. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BGZD201910021.htm [14] 蒋栋林. 基于LuGre模型的比例多路阀摩擦力分析与颤振补偿[D]. 秦皇岛: 燕山大学, 2014.JIANG D L. Friction analysis and flutter compensationof proportional multi-way valve based on LuGre model[D]. Qinhuangdao: Yanshan University, 2014. (in Chinese) [15] 吴晓敏, 刘暾东, 贺苗, 等. 机器人关节摩擦建模与补偿研究[J]. 仪器仪表学报, 2018, 39(10): 44-50. https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB202011031.htmWU X M, LIU T D, HE M, et al. Research on friction modeling and compensation of robot manipulator[J]. Chinese Journal of Scientific Instrument, 2018, 39(10): 44-50. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB202011031.htm [16] 郭丁旭, 姜乃晶, 张舒, 等. 含有LuGre摩擦并联机械臂的自适应控制[J]. 动力学与控制学报, 2019, 17(4): 362-368. https://www.cnki.com.cn/Article/CJFDTOTAL-DLXK201904011.htmGUO D X, JIANG N J, ZHANG S, et al. Adaptive control of parallel manipulators with LuGre friction compensation[J]. Journal of Dynamics and Control, 2019, 17(4): 362-368. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DLXK201904011.htm [17] 丛中旖. 基于LuGre模型的伺服转台自适应反演滑模控制[J]. 四川兵工学报, 2014, 35(7): 75-78. https://www.cnki.com.cn/Article/CJFDTOTAL-CUXI201407022.htmCONG Z Y. Adaptive backstepping sliding mode Control of servo turntable based on LuGre model[J]. Sichuan Armed Forces Journal, 2014, 35(7): 75-78. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CUXI201407022.htm [18] YAO J Y, JIAO Z X, YAO B. Robust control for static loading of electro-hydraulic load simulator with friction compensation[J]. Chinese Journal of Aeronautics, 2012, 25(6): 954-962. [19] DE WIT C C, OLSSON H, ASTROM K J, et al. A new model for control of systems with friction[J]. IEEE Transactions on Automatic Control, 1995, 40(3): 419-425. [20] CARNEIRO J F, DE ALMEIDA F G. Reduced-order thermodynamic models for servo-pneumatic actuator chambers[J]. Proceedings of the Institution of Mechanical Engineers, Part Ⅰ: Journal of Systems and Control Engineering, 2006, 220(4): 301-314. [21] XU L, YAO B. Adaptive robust control of mechanical systems with non-linear dynamic friction compensation[J]. International Journal of Control, 2008, 81(2): 167-176. [22] YAO B, TOMIZUKA M. Smooth robust adaptive sliding mode control of manipulators with guaranteed transient performance[J]. Journal of Dynamic Systems, Measurement, and Control, 1996, 118(4): 764-775. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 94
- HTML全文浏览量: 66
- PDF下载量: 15
- 被引次数: 0
