




Study on Damping Control Method of Eight-wheel Heavy Vehicle Suspension Under Non-Gaussian Random Road
-
摘要: 针对非高斯随机路面条件开展了八轮重型装甲车辆悬架的减振控制策略研究。当前随机路面通常采用基于功率谱密度法的高斯信号进行表征, 难以准确描述装甲车辆行驶的复杂路面工况。建立了八轮重型装甲车的整车悬架模型, 实现了对起伏路面非高斯性能的准确表征, 提出了针对非高斯随机路面的模糊自适应悬架振动控制策略。仿真结果表明: 所提出的控制策略可在装甲车所行驶的实际路面工况下对整车起到良好的减振效果, 为八轮装甲车辆的减振控制奠定了理论基础。Abstract: In this paper, the damping control strategy of eight-wheel heavy armored vehicle suspension was studied under non-Gaussian random road conditions. At present, the random road is usually characterized by Gaussian signal based on power spectral density method, which is difficult to exactly describe the complex road conditions of armored vehicles. First, the suspension model of the eight-wheel heavy armored vehicle was established; Second, the accurate characterization of non-Gaussian performance of undulating road was realized; Finally, a fuzzy adaptive suspension vibration control strategy on non-Gaussian random roads was proposed. The simulation results show that the proposed control strategy has a good damping effect on the armored vehicle under the actual road conditions, and lays a theoretical foundation for the damping control of the armored vehicle.
-
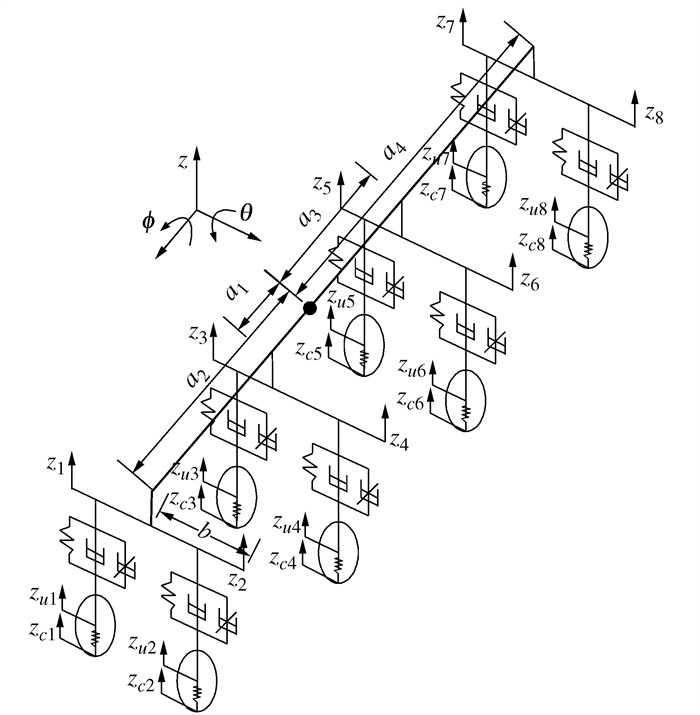
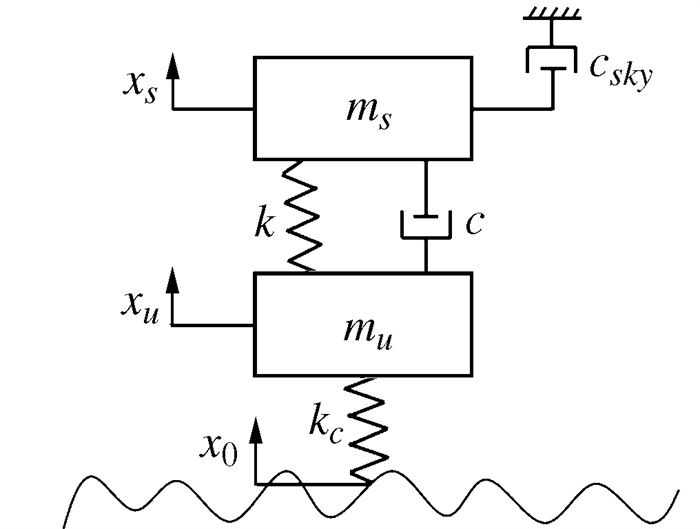
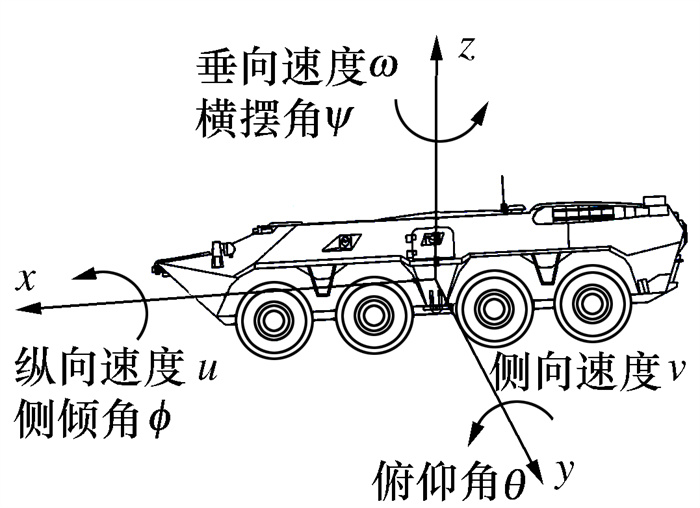
图 2 八轮重型车辆整车悬架模型
Figure 2. Whole vehicle suspension model of eight wheeled heavy armored vehicle
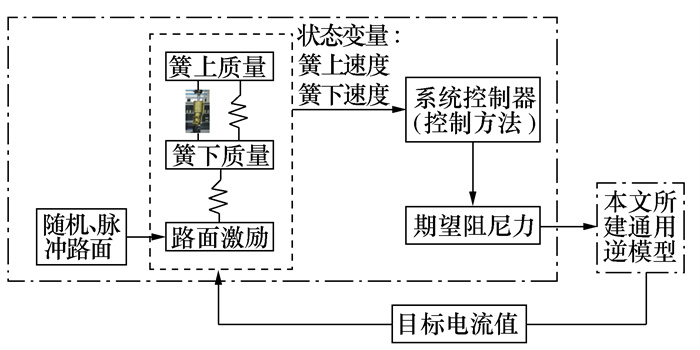
图 8 磁流变半主动悬架控制系统框图
Figure 8. Block diagram of magnetorheological semi-active suspension control system
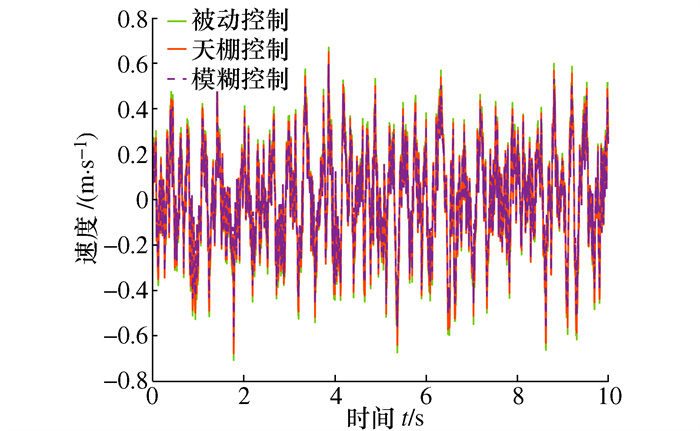
图 10 高斯随机路面激励下车辆质心处振动速度
Figure 10. Vibration velocity at the center of mass of the vehicle under Gaussian random road excitation
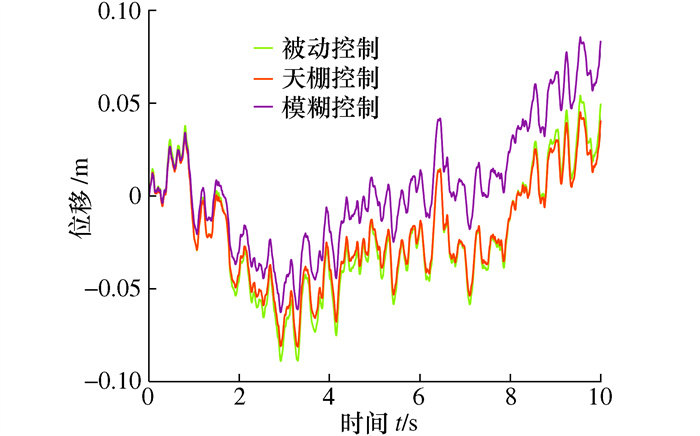
图 11 高斯随机路面激励下车辆质心处振动位移
Figure 11. Vibration displacement at the center of mass of the vehicle under Gaussian random road excitation
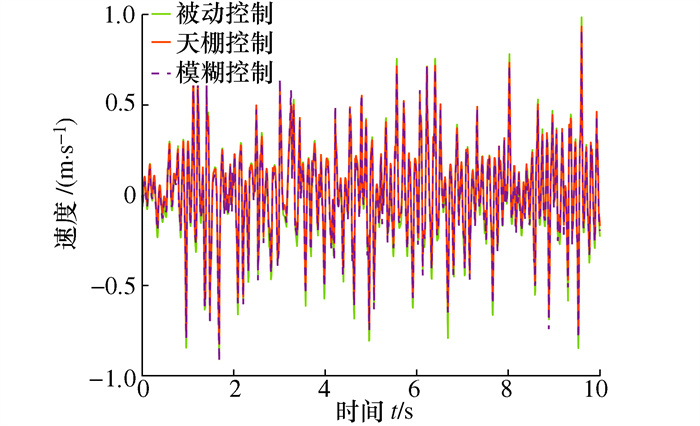
图 12 非高斯随机路面激励下车辆质心处振动速度
Figure 12. Vibration velocity at the center of mass of a vehicle under non-Gaussian random road excitation

图 13 非高斯随机路面激励下车辆质心处振动位移
Figure 13. Vibration displacement at the center of mass of the vehicle under non-Gaussian random road excitation
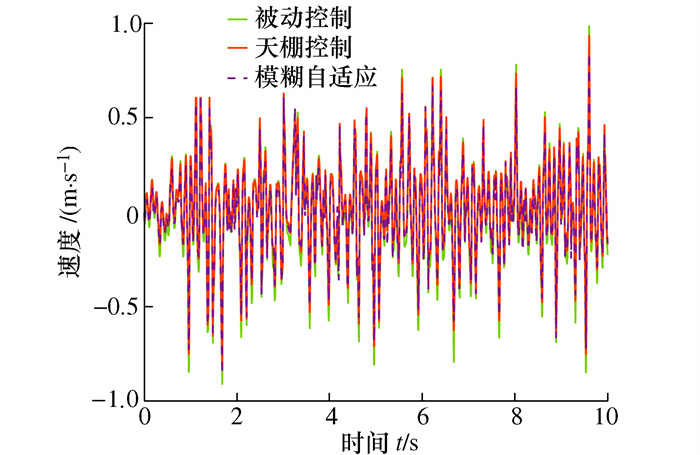
图 14 改进后非高斯随机路面激励下车辆质心处振动速度
Figure 14. Vibration velocity at the centroid of the vehicle under improved non-Gaussian random road excitation
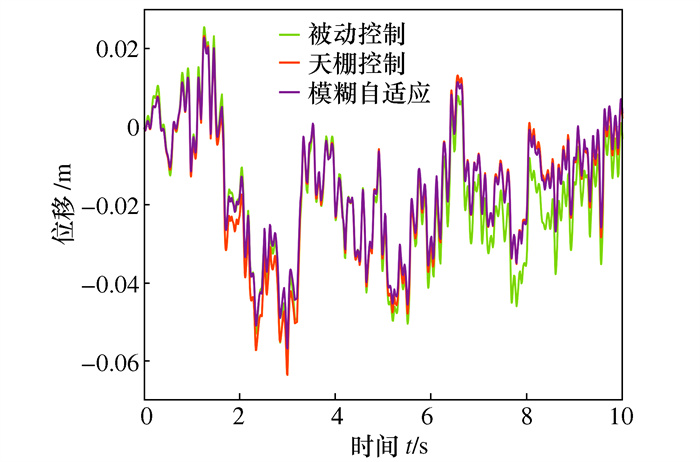
图 15 改进后非高斯随机路面激励下车辆质心处振动位移
Figure 15. Vibration displacement at the center of mass of the vehicle under improved non-Gaussian random road excitation
表 1 高斯随机路面不同控制策略效果比较
Table 1. Comparison of effects of different control strategies on Gaussian random road surface
高斯随机信号 速度 位移 被动控制 0.225 9 m/s 0.037 2 m 天棚控制 0.209 9 m/s 0.0335 m 天棚控制改善比例 -7.08% -9.95% 模糊控制 0.189 6 m/s 0.0318 m 模糊控制改善比例 -16.06% -14.52%  下载: 导出CSV
下载: 导出CSV
表 2 非高斯随机路面不同控制策略效果比较
Table 2. Comparison of the effects of different control strategies on non Gaussian random road surfaces
非高斯随机信号 速度 位移 被动控制 0.266 7 m/s 0.022 7 m 天棚控制 0.247 2 m/s 0.021 0 m 天棚控制改善比例 -7.31% -7.49% 模糊控制 0.251 2 m/s 0.021 4 m 模糊控制改善比例 -5.81% -5.72% 模糊自适应 0.230 2 m/s 0.020 1 m 模糊自适应改善比例 -13.69% -11.45%
下载: 导出CSV
-
[1] 丁法乾. 履带式装甲车辆悬挂系统动力学[M]. 北京: 国防工业出版社, 2004.DING F Q. Dynamics of tracked armored vehicle suspension system[M]. Beijing: National Defense Industry Press, 2004. (in Chinese) [2] 祁宏钟, 雷雨成, 吴云飞, 等. 某悬架减振器的精确建模及仿真[J]. 机械科学与技术, 2002, 21(5): 714-716. doi: 10.3321/j.issn:1003-8728.2002.05.010QI H Z, LEI Y C, WU Y F, et al. Precise modeling and simulation of a kind of suspension absorber[J]. Mechanical Science and Technology for Aerospace Engineering, 2002, 21(5): 714-716. (in Chinese) doi: 10.3321/j.issn:1003-8728.2002.05.010 [3] 刘玉霞. 基于整车动力学的轮式装甲车动力装置减振优化[D]. 武汉: 华中科技大学, 2018.LIU Y X. Vibration optimization of powertrain mounting for wheeled panzer based on whole-vehicle dynamics[D]. Wuhan: Huazhong University of Science and Technology, 2018. (in Chinese) [4] 陈花玲, 胡选利, 张铁山, 等. 履带式装甲车甲板振动强度测量与减振研究[J]. 振动与冲击, 1996, 15(3): 76-82. https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ603.017.htmCHEN H L, HU X L, ZHANG T S, et al. Study on vibration intensity measurement and vibration reduction of tracked armored vehicle deck[J]. Journal of Vibration and Shock, 1996, 15(3): 76-82. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZDCJ603.017.htm [5] 刘非. 轮式装甲车磁流变半主动悬架控制系统设计[D]. 重庆: 重庆大学, 2012.LIU F. Design of magnetorheological semi-active suspension control system in wheeled armored vehicles[D]. Chongqing: Chongqing University, 2012. (in Chinese) [6] 刘振旺. 某装甲车车内隔振降噪特性研究[D]. 太原: 中北大学, 2008.LIU Z W. Research of vibration isolation and noise reduction performance of armored vehicles' inside[D]. Taiyuan: North University of China, 2018. (in Chinese) [7] 胡国良, 林豪, 李刚. 采用磁流变阻尼器的三自由度半主动座椅悬架系统变论域模糊控制[J]. 机械科学与技术, 2020, 39(3): 425-432. doi: 10.13433/j.cnki.1003-8728.20190127HU G L, LIN H, LI G. Variable universe fuzzy control of 3-DOF semi-active seat suspension system using magnetorheological damper[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(3): 425-432. (in Chinese) doi: 10.13433/j.cnki.1003-8728.20190127 [8] 毕凤荣, 石纯放, 梁永勤. 悬架系统非线性减振器阻尼值变化系数对整车振动影响的研究[J]. 机械科学与技术, 2017, 36(9): 1421-1427. doi: 10.13433/j.cnki.1003-8728.2017.0918BI F R, SHI C F, LIANG Y Q. Research on effect of variation coefficient of nonlinear suspension system of shock absorber damping values on vehicle vibration[J]. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(9): 1421-1427. (in Chinese) doi: 10.13433/j.cnki.1003-8728.2017.0918 [9] 寇发荣, 景强强, 马建, 等. 电磁混合主动悬架内分泌复合天地棚控制研究[J]. 机械科学与技术, 2020, 39(10): 1615-1623. doi: 10.13433/j.cnki.1003-8728.20190314KOU F R, JING Q Q, MA J, et al. Reserach on endocrine compound skyhook and groundhook control of electro-magnetic hybrid active suspension[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(10): 1615-1623. (in Chinese) doi: 10.13433/j.cnki.1003-8728.20190314 [10] NING D H, SUN S S, WEI L D, et al. Vibration reduction of seat suspension using observer based terminal sliding mode control with acceleration data fusion[J]. Mechatronics, 2017, 44: 71-83. [11] 李金辉, 何杰, 李旭宏. 车辆随机及移动荷载作用下路面动态响应[J]. 长安大学学报(自然科学版), 2015, 35(2): 38-45. https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL201502008.htmLI J H, HE J, LI X H. Dynamic response of pavement under vehicle random load and moving constant load[J]. Journal of Chang'an University (Natural Science Edition), 2015, 35(2): 38-45. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XAGL201502008.htm [12] HU M J, PARK J H, CHENG J. Robust fuzzy delayed sampled-data control for nonlinear active suspension systems with varying vehicle load and frequency-domain constraint[J]. Nonlinear Dynamics, 2021, 105(3): 2265-2281. [13] WU J, ZHOU H L, LIU Z Y, et al. Ride comfort optimization via speed planning and preview semi-active suspension control for autonomous vehicles on uneven roads[J]. IEEE Transactions on Vehicular Technology, 2020, 69(8): 8343-8355. [14] MIL-STD-810F Department of defense test method standard for environmental engineering considerations and laboratory tests, USA, January, 2000. [15] ALEXANDER S. Random vibration testing beyond PSD limitations[D]. New Zealand: University of Auckland, 2014. [16] SLAVIĈ J, MRŠNIK M, ĈESNIK M, et al. Uniaxial vibration fatigue[M]//SLAVIĈ J, MRŠNIK M, ĈESNIK M, et al. Vibration Fatigue by Spectral Methods. Amsterdam: Elsevier, 2021: 99-113. -


 点击查看大图
点击查看大图
计量
- 文章访问数: 173
- HTML全文浏览量: 180
- PDF下载量: 84
- 被引次数: 0
