




Research on Kinematics Analysis and Positioning System of Double Steering-wheel Parking Robot
-
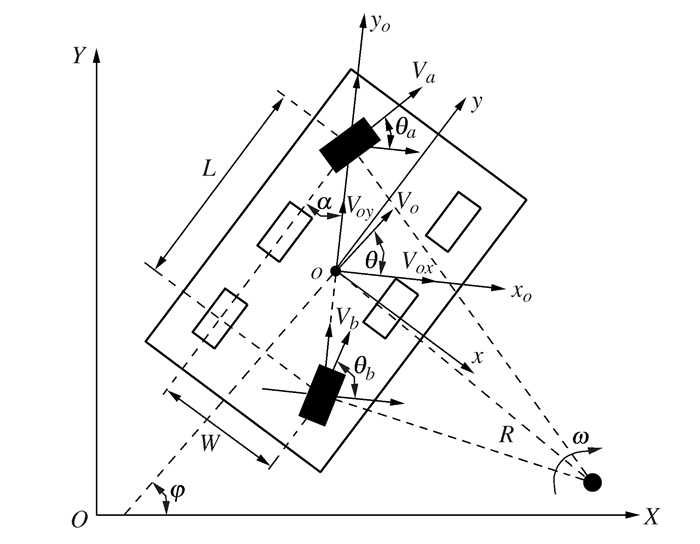
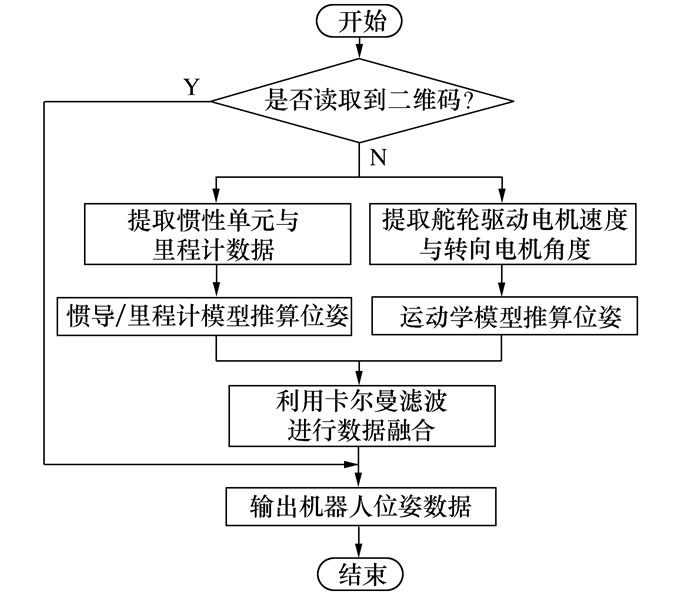
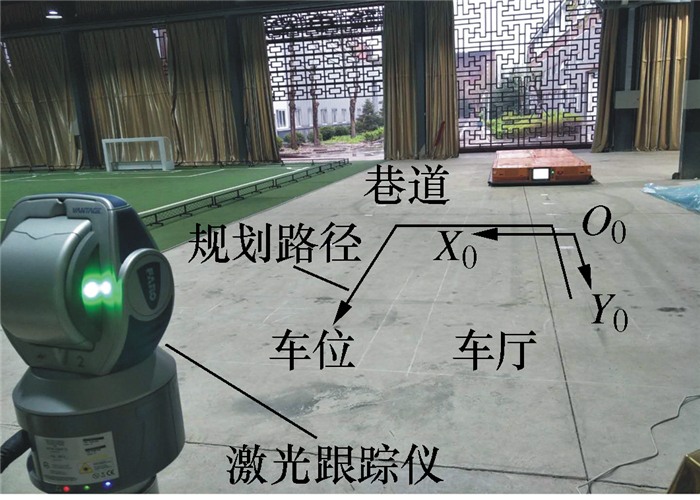
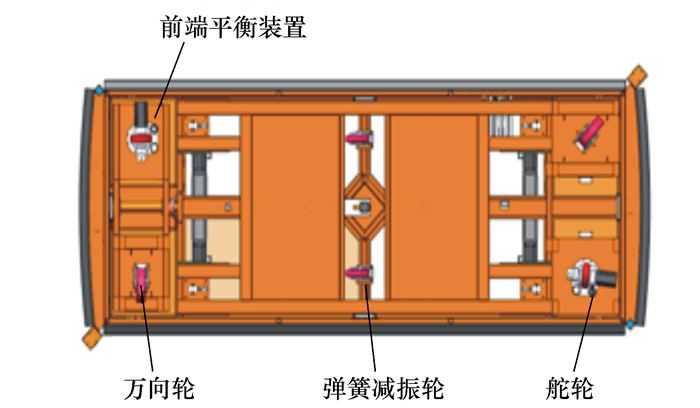
摘要: 针对泊车机器人定位特点, 使用惯导、里程计、二维码模块, 基于Visual C++平台开发了一种泊车机器人定位系统。针对双舵轮泊车机器人构型, 采用速度-几何法建立了机器人运动学模型, 在此基础上, 推导了惯导传感器数据的姿态变换矩阵, 建立了里程计传感器运动模型, 结合运动学航位推算与卡尔曼滤波方法, 提出了一种多传感器组合定位方法。泊车机器人定位实验表明, 应用多传感器组合定位方法的泊车机器人可以较好地实现机器人稳定工作, 相比航位推算定位方法, 其平均定位偏差降低了92%, 达到14.04 mm, 定位精度显著提高, 可以较好地满足泊车机器人定位需求。Abstract: Aiming at the positioning feature of parking robot, by using inertial navigation, odometer and two-dimensional code module, a parking robot positioning system was developed based on Visual C + + platform. The speed geometry method was adopted and the robot kinematic model was established. On this basis, the attitude transformation matrix of inertial navigation sensor data was derived, and the odometer sensor motion model was established. Combined Kalman filter method with kinematic dead reckoning, a multi-sensor combined positioning method was proposed. The positioning experiment of parking robot shows that, the parking robot that adopts multi-sensor combined positioning method can better realize the operation; Compared with dead reckoning positioning method, its average positioning deviation is reduced by 92%, reaching 14.04 mm, and the positioning accuracy is significantly improved, which can better meet the positioning requirements of parking robot.
-
Key words:
- parking robot /
- kinematics /
- mobile robot positioning /
- speed geometry method
-
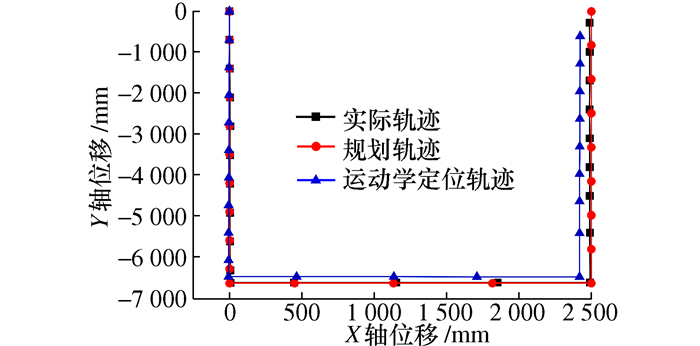
图 6 运动学航位推算定位方法实验结果
Figure 6. Experimental results on kinematic dead reckoning positioning method
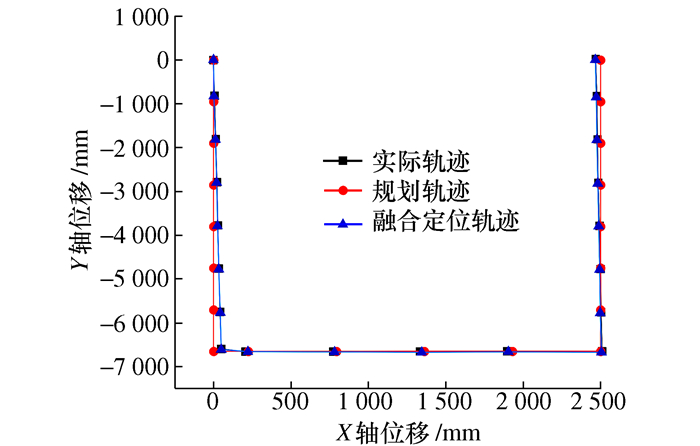
图 7 多传感器组合定位方法实验结果
Figure 7. Experimental results on multi-sensor combined positioning method
表 1 运动学航位推算定位方法实验数据
Table 1. Experimental data of kinematic dead reckoning positioning method
实测坐标 计算坐标 误差d/mm X/mm Y/mm X/mm Y/mm 0.01 -1.19 0.00 0.00 1.19 0.43 -695.08 -0.64 -700.66 5.68 2.01 -1 399.31 -1.33 -1 373.73 25.80 4.37 -2 104.78 -2.00 -2 047.07 58.06 4.85 -2 809.72 -2.62 -2 720.80 89.24 4.48 -3 514.16 -3.31 -3 394.15 120.26 3.90 -4 218.63 -3.94 -4 066.94 151.90 4.17 -4 923.16 -4.48 -4 740.78 182.58 4.73 -5 627.95 -5.11 -5 413.98 214.20 5.99 -6 333.23 -5.68 -6 087.69 245.82 7.83 -6 637.20 -6.03 -6 491.74 146.12 447.03 -6 633.10 263.83 -6 491.99 231.24 1 150.98 -6 633.22 937.00 -6 492.72 255.99 1 853.42 -6 632.98 1 610.57 -6 493.51 280.06 2 490.43 -6 634.39 2 284.48 -6 494.05 249.22 2 490.32 -6 634.39 2 418.81 -6 494.26 157.32 2 490.33 -6 634.39 2 418.81 -6 494.26 157.32 2 483.62 -6 624.79 2 417.48 -6 493.82 146.72 2 489.64 -4 514.31 2 419.13 -4 650.77 153.60 2 489.38 -3 810.98 2 419.79 -3 977.71 180.67 2 488.39 -3 105.48 2 420.38 -3 304.12 209.95 2 487.89 -2 400.05 2 421.04 -2 631.19 240.60 2 489.14 -1 694.51 2 421.63 -1 957.33 271.35 2 489.51 -988.93 2 422.35 -1 283.84 302.46 2 487.83 -282.71 2 423.05 -610.63 334.25  下载: 导出CSV
下载: 导出CSV
表 2 多传感器组合定位方法实验数据
Table 2. Experimental data of multi-sensor combined positioning method
实测坐标 计算坐标 误差d/mm X/mm Y/mm X/mm Y/mm -0.02 0.01 0.00 0.00 0.29 5.71 -813.90 2.85 -828.41 15.04 14.40 -1 800.33 12.34 -1 817.10 17.14 22.35 -2 787.31 20.54 -2 801.02 14.08 27.90 -3 773.44 26.34 -3 789.14 16.02 34.73 -4 759.40 35.36 -4 776.09 16.92 41.77 -5 745.98 44.99 -5 766.02 20.49 49.62 -6 591.78 50.99 -6 608.03 16.52 206.50 -6 656.84 222.54 -6 655.94 15.86 772.61 -6 655.64 782.30 -6 664.49 13.13 1 333.01 -6 652.03 1 344.76 - 6 670.20 21.72 1 894.90 -6 648.24 1 904.85 -6 660.54 15.88 2 509.28 -6 645.60 2 505.80 -6 669.92 24.82 2 504.31 -5 756.20 2 498.52 -5 774.02 19.01 2 498.92 -4 769.71 2 494.07 -4 787.60 18.81 2 492.97 -3 785.05 2 487.91 -3 799.48 15.57 2 484.93 -2 797.57 2 481.89 -2 822.93 25.79 2 480.36 -1 809.09 2 475.80 -1 825.96 17.74 2 475.23 -821.64 2 472.53 -844.66 23.43 2 468.92 25.08 2 466.59 2.58 22.86
下载: 导出CSV
-
[1] NING Z X, WANG X, WANG J, et al. Vehicle pose estimation algorithm for parking automated guided vehicle[J]. International Journal of Advanced Robotic Systems, 2020, 17(1): 1-11. [2] 王帅, 杨建玺. 基于双目视觉的泊车机器人障碍物检测系统[J]. 智能计算机与应用, 2019, 9(4): 79-81. https://www.cnki.com.cn/Article/CJFDTOTAL-DLXZ201904017.htmWANG S, YANG J X. Parking robot obstacle detection system based on binocular vision[J]. Intelligent Computer and Applications, 2019, 9(4): 79-81. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DLXZ201904017.htm [3] YE H, JIANG H B, MA S D, et al. Linear model predictive control of automatic parking path tracking with soft constraints[J]. International Journal of Advanced Robotic Systems, 2019, 16(3): 1-13. [4] BAI L, DU C J. Wide-band high-gain DGS antenna system for indoor robot positioning[J]. International Journal of Antennas and Propagation, 2019, 2019: 2102593. [5] KIM J, GUIVANT J, SOLLIE M L, et al. Compressed pseudo-SLAM: pseudorange-integrated compressed simultaneous localisation and mapping for unmanned aerial vehicle navigation[J]. Journal of Navigation, 2021, 74(5): 1091-1103. doi: 10.1017/S037346332100031X [6] YANG Y, SHEN Q, LI J, et al. Position and attitude estimation method integrating visual odometer and GPS[J]. Sensors, 2020, 20(7): 2121-2136. doi: 10.3390/s20072121 [7] YAN X Y, GUO H, YU M, et al. Light detection and ranging/inertial measurement unit-integrated navigation positioning for indoor mobile robots[J]. International Journal of Advanced Robotic Systems, 2020, 17(2): 1-11. [8] TSAI S H, KAO L H, LIN H Y, et al. A sensor fusion based nonholonomic wheeled mobile robot for tracking control[J]. Sensors, 2020, 20(24): 7055. doi: 10.3390/s20247055 [9] DOGRU S, MARQUES L. An improved kinematic model for skid-steered wheeled platforms[J]. Autonomous Robots, 2021, 45(2): 229-243. doi: 10.1007/s10514-020-09959-0 [10] FARHANGIAN F, SEFIDGAR M, LANDRY R. Applying a ToF/IMU-based multi-sensor fusion architecture in pedestrian indoor navigation methods[J]. Sensors, 2021, 21(11): 3615. doi: 10.3390/s21113615 [11] 陈映秋, 旷俭, 牛小骥, 等. 基于车轮安装惯性测量单元的车载组合导航[J]. 中国惯性技术学报, 2018, 26(6): 799-804. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201806016.htmCHEN Y Q, KUANG J, NIU X J, et al. Vehicle integrated navigation based on wheel mounted MEMS-IMU[J]. Journal of Chinese Inertial Technology, 2018, 26(6): 799-804. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201806016.htm [12] 刘艳娇, 张云洲, 荣磊, 等. 基于直接法与惯性测量单元融合的视觉里程计[J]. 机器人, 2019, 41(5): 683-689. https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201905014.htmLIU Y J, ZHANG Y Z, RONG L, et al. Visual odometry based on the direct method and the inertial measurement unit[J]. Robot, 2019, 41(5): 683-689. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201905014.htm [13] WANG F F, SU T L, JIN X B, et al. Indoor tracking by RFID fusion with IMU data[J]. Asian Journal of Control, 2019, 21(4): 1768-1777. [14] 刘爽. 基于二维码识别的自动泊车机器人定位导航技术研究[D]. 武汉: 华中科技大学, 2017.LIU S. Research on localization and navigation of automatic parking robot based on two-dimension code recognition[D]. Wuhan: Huazhong University of Science and Technology, 2017. (in Chinese) [15] CRASSIDIS J L. Sigma-point Kalman filtering for integrated GPS and inertial navigation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(2): 750-756. -


 点击查看大图
点击查看大图
计量
- 文章访问数: 95
- HTML全文浏览量: 89
- PDF下载量: 22
- 被引次数: 0
