




Structural Design and Experimental Research of Flexible Gripper for Waterbomb Origami
-
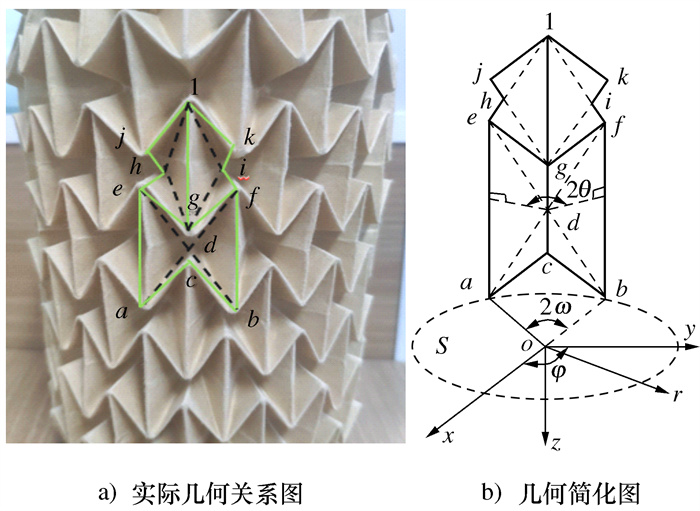
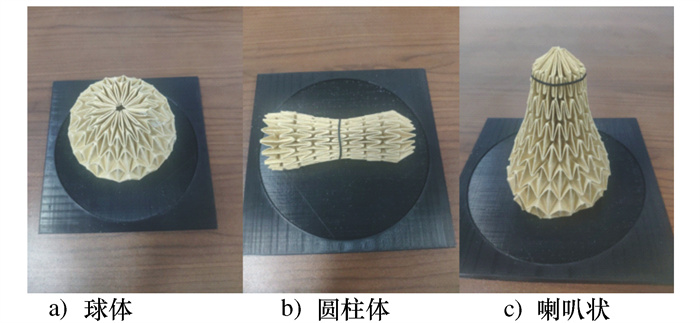
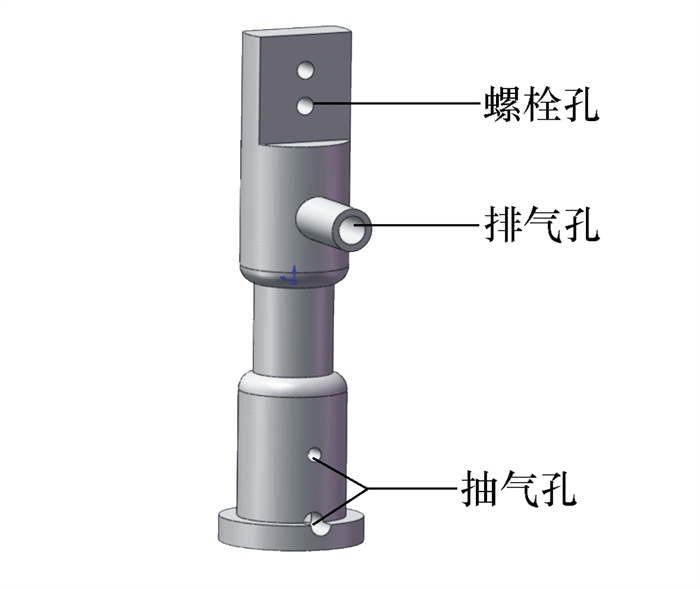
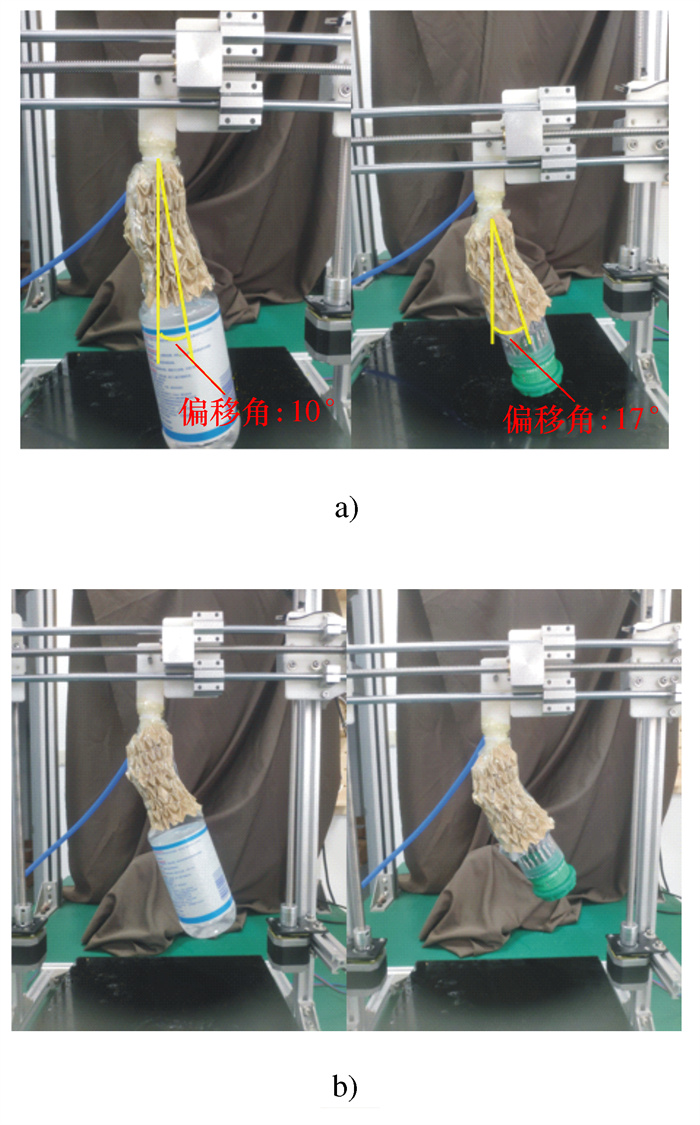
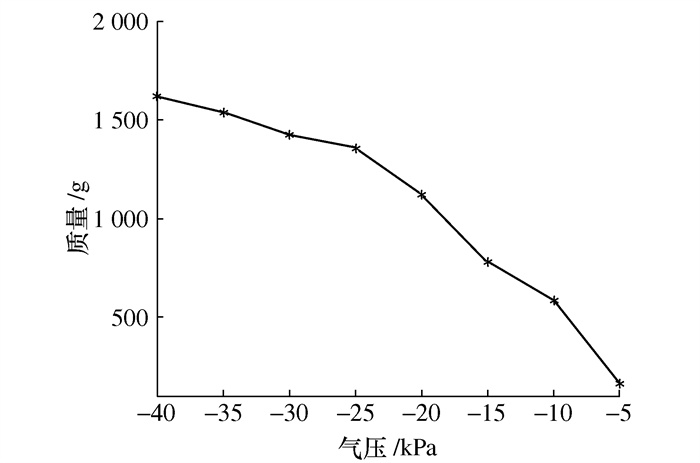
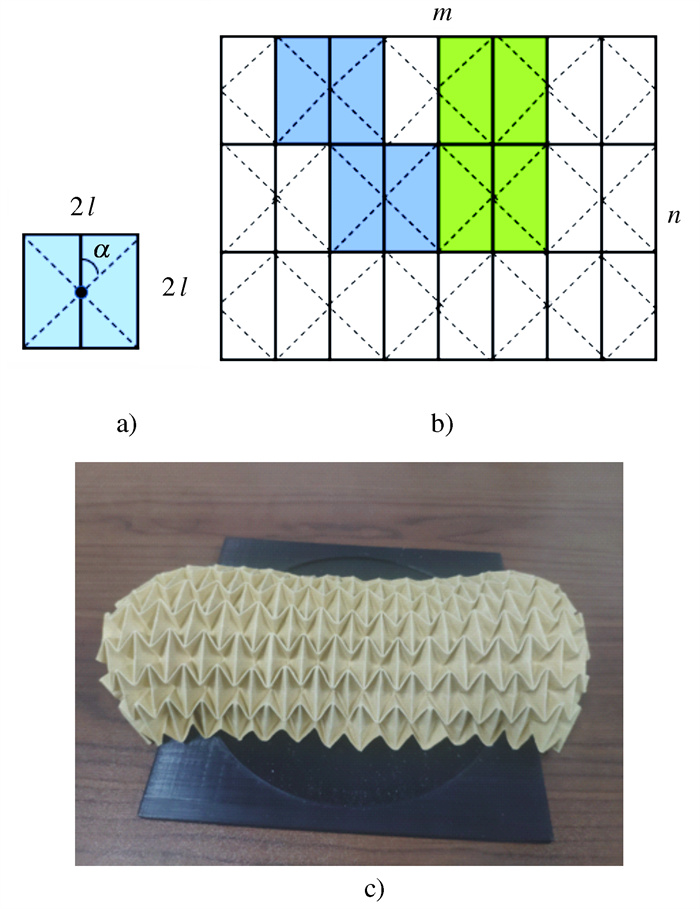
摘要: 提出了一种由水弹折纸为原理的轻量级折纸抓手。对水弹结构进行了介绍和几何分析,得到了形成水弹圆柱体可折叠条件,并介绍了抓取装置设计和制造方法。搭建了折纸抓手的抓取实验平台,对具有不同几何形状、质地和重量的物体进行了抓取和提升测试,测试了抓手轴向偏移抓取的能力,并分析了抓手负载能力随气压的变化关系。抓取实验表明该柔性抓手具有轴向偏移抓取、形状自适应抓取、抓力可控等优点。在食品、水果等质地柔软且质量较轻目标物的抓取及分拣领域具有的实用性。Abstract: This paper proposes a lightweight origami gripper based on the waterbomb origami principle. Firstly, the structure of a waterbomb is introduced and its geometry is analyzed. The foldable conditions for forming the waterbomb′s cylinder are obtained, and the gripping device design and manufacturing method are presented. The gripping experimental platform of the origami gripper was built. The gripping and lifting of objects with different geometries, textures and weights were tested. The gripper′s axial offset gripping capability was also tested, and the relationship between the gripper′s load capacity and air pressure was analyzed. The experiments on gripping show that the flexible gripper has the advantage of axial offset gripping, shape adaptive gripping and controllable gripping force. It is useful to grasp and sort flexible and light objects such as food and fruits.
-
Key words:
- origami gripper /
- waterbomb structure /
- gripping test /
- flexible gripping
-
表 1 位于圆柱坐标系中主要节点坐标
Table 1. Coordinates of main nodes in the cylindrical coordinate system
节点 r φ z a R 2ω 0 b R 0 0 c 
ω 
d Rcosω ω -l e R 2ω -2l f R 0 -2l g 
ω 
 下载: 导出CSV
下载: 导出CSV
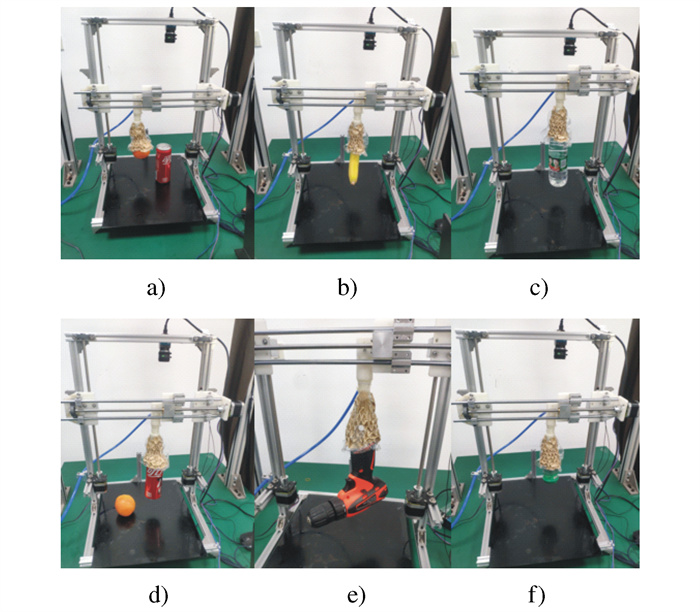
表 2 抓手成功抓取的目标
Table 2. Objects to be successfully gripped by the gripper
类型 种类及质量 食物 橙子(160 g), 苹果(171 g), 香蕉(152 g), 鸡蛋(65 g), 芒果(226 g), 杨桃(140 g) 瓶子 易拉罐(357 g), 可乐瓶装(630 g), 矿泉水(583 g), 咖啡瓶(345 g), 墨水瓶(126 g), 其他 工具盒(162 g), 电钻(916 g), 方形木块(40 g), 卷尺(115 g), 鼠标(76 g), 乒乓球(2.6 g)
下载: 导出CSV
-
[1] 魏树军, 王天宇, 谷国迎. 基于纤维增强型驱动器的气动软体抓手设计[J]. 机械工程学报, 2017, 53(13): 29-38. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201713004.htmWEI S J, WANG T Y, GU G Y. Design of a soft pneumatic robotic gripper based on fiber-reinforced actuator[J]. Journal of Mechanical Engineering, 2017, 53(13): 29-38. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201713004.htm [2] GLICK P, SURESH S A, RUFFATTO D, et al. A soft robotic gripper with gecko-inspired adhesive[J]. IEEE Robotics and Automation Letters, 2018, 3(2): 903-910. doi: 10.1109/LRA.2018.2792688 [3] WANG Z K, KANEGAE R, HIRAI S. Circular shell gripper for handling food products[J]. Soft Robotics, 2021, 8(5): 542-554. doi: 10.1089/soro.2019.0140 [4] 贾江鸣, 叶玉泽, 程培林, 等. 细长果蔬采摘软体气动抓手设计与参数优化[J]. 农业机械学报, 2021, 52(6): 26-34. https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX202106003.htmJIA J M, YE Y Z, CHENG P L, et al. Design and parameter optimization of soft pneumatic gripper for slender fruits and vegetables picking[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(6): 26-34. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX202106003.htm [5] TAWK C, PANHUIS M I H, SPINKS G M, et al. Bioinspired 3D printable soft vacuum actuators for locomotion robots, grippers and artificial muscles[J]. Soft Robotics, 2018, 5(6): 685-694. doi: 10.1089/soro.2018.0021 [6] AMEND J, CHENG N, FAKHOURI S, et al. Soft robotics commercialization: jamming grippers from research to product[J]. Soft Robotics, 2016, 3(4): 213-222. doi: 10.1089/soro.2016.0021 [7] LI S G, STAMPFLI J J, XU H J, et al. A vacuum- driven origami "magic-ball" soft gripper[C]//Proceedings of 2019 International Conference on Robotics and Automation. Montreal: IEEE, 2019. [8] 胡楠, 陈花玲. 折纸结构驱动技术的研究进展[J]. 机械工程学报, 2020, 56(15): 118-128. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB202015013.htmHU N, CHENG H L. Progress in actuating technology of origami structure[J]. Journal of Mechanical Engineering, 2020, 56(15): 118-128. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB202015013.htm [9] FELTON S, TOLLEY M, DEMAINE E, et al. A method for building self-folding machines[J]. Science, 2014, 345(6197): 644-646. doi: 10.1126/science.1252610 [10] 刘世毅, 王立武. 折纸技术在空间结构中的应用和发展[J]. 航天返回与遥感, 2020, 41(6): 114-128. https://www.cnki.com.cn/Article/CJFDTOTAL-HFYG202006012.htmLIU S Y, WANG L W. Development and application of origami in space structure[J]. Spacecraft Recovery & Remote Sensing, 2020, 41(6): 114-128. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HFYG202006012.htm [11] BUTLER J, MORGAN J, PEHRSON N, et al. Highly compressible origami bellows for harsh environments[C]//Proceedings of the 2016 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Charlotte: ASME, 2016. [12] TAYLOR J M, PEREZ-TORALLA K, AISPURO R, et al. Covalent bonding of thermoplastics to rubbers for printable, reel-to-reel processing in soft robotics and microfluidics[J]. Advanced Materials, 2018, 30(7): 1705333. doi: 10.1002/adma.201705333 [13] SONG J, CHEN Y, LU G X. Axial crushing of thin- walled structures with origami patterns[J]. Thin-Walled Structures, 2012, 54: 65-71. doi: 10.1016/j.tws.2012.02.007 [14] LEE D Y, KIM S R, KIM J S, et al. Origami wheel transformer: a variable-diameter wheel drive robot using an origami structure[J]. Soft Robotics, 2017, 4(2): 163-180. doi: 10.1089/soro.2016.0038 [15] 李笑, 李明. 折纸及其折痕设计研究综述[J]. 力学学报, 2018, 50(3): 467-476. https://www.cnki.com.cn/Article/CJFDTOTAL-LXXB201803002.htmLI X, LI M. A review of origami and its crease design[J]. Chinese Journal of Theoretical and Applied Mechanics, 2018, 50(3): 467-476. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-LXXB201803002.htm -






 点击查看大图
点击查看大图
图(12) / 表(2)
计量
- 文章访问数: 81
- HTML全文浏览量: 80
- PDF下载量: 26
- 被引次数: 0
