




Numerical Modeling and Verification of Rolling Stock Braking Anti-skid Control System
-
摘要: 基于轨道车辆制动系统三位式防滑阀工作原理,建立防滑阀数学模型,进行充排气特性仿真分析;依次建立电空转换阀、紧急阀及中继阀等阀类数学模型,构建空气制动单元模型;针对制动防滑控制系统,建立防滑控制单元及制动动力学单元模型,结合空气制动单元模型搭建四轴车辆制动防滑控制数值仿真平台;利用数值仿真平台进行列车制动防滑性能仿真分析,并通过制动距离、车速及滑动量误差量3个指标与实车在线试验数据对比。结果表明:制动距离仿真值与试验值误差小于5%;车速仿真曲线和试验曲线吻合较好,二者任意时刻的差值小于3 km/h;各个滑动间隔内的滑动量误差平均值小于20%;三者均满足指标要求,验证了所建四轴车辆制动防滑控制模型的有效性。Abstract: Based on the working principle of the three-position anti-skid valve of the rolling stock braking system, a mathematical model of the anti-skid valve is established, and the simulation analysis of the charging and exhaust characteristics is carried out; And the mathematical models of electro-pneumatic switching valves, emergency valves, and relay valves are established in order to construct air brake unit models; Then, for the brake anti-skid control system, the anti-skid control unit and brake dynamics unit models are established, combined with the air brake unit model to build a four-axle vehicle braking anti-skid control numerical simulation platform. Finally, the numerical simulation platform is used to simulate and analyze the braking anti-skid performance of the train, and compare with actual vehicle online test data through three indicators of braking distance, vehicle speed and slippage error. The results show that: the error between the braking distance simulation value and the test value is less than 5%; The vehicle speed simulation curve and the test curve are in good agreement, and the difference between the two at any time is less than 3 km/h; The average value of slippage error in each sliding interval is less than 20%. All three meet the indicator requirements, verifying the effectiveness of the built four-axle vehicle brake anti-skid control model.
-
Key words:
- rolling stock /
- braking system /
- anti-skid control /
- numerical modeling
-
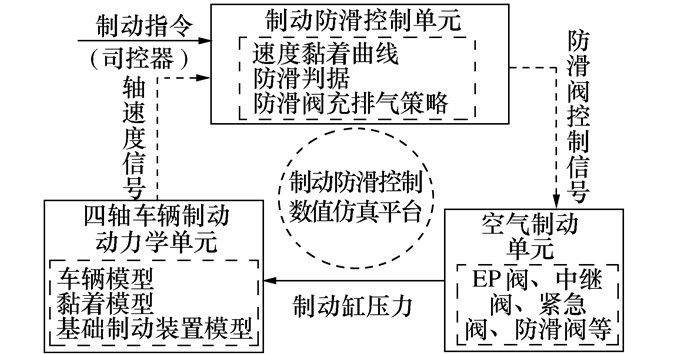
图 5 四轴车辆制动防滑控制数值仿真平台
Figure 5. Numerical simulation platform for four-axle vehicle braking and anti-skid control
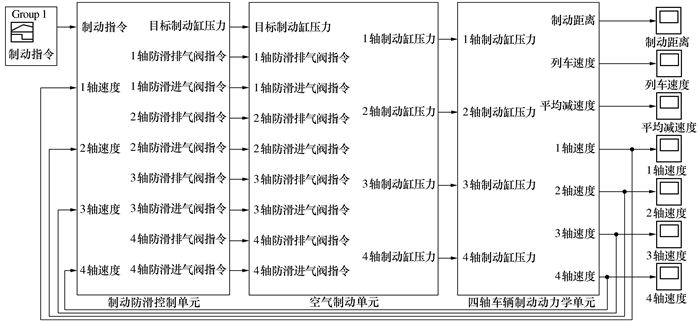
图 6 四轴车辆制动防滑控制数值仿真模型
Figure 6. Numerical simulation model of four-axle vehicle braking and anti-skid control

图 7 列车速度仿真值、试验值及其差值曲线
Figure 7. Train speed simulation value and test value and their difference curves
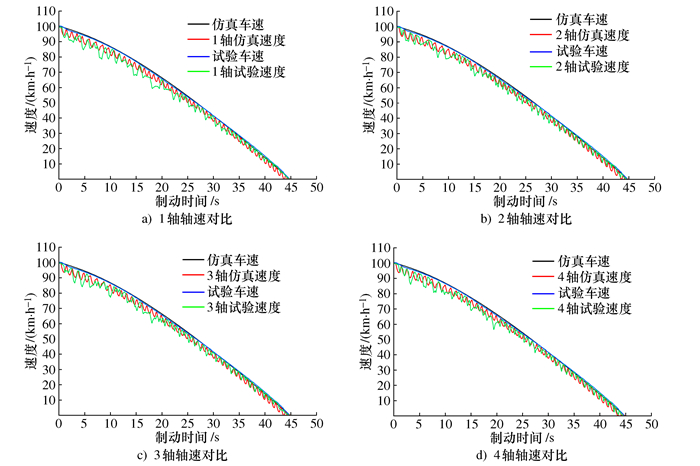
图 8 各轴轴速仿真值与试验值对比
Figure 8. Comparison between the simulation value and the test value of each axle speed
表 1 仿真模型部分参数
Table 1. Some parameters of the simulation model
仿真参数 数值 进气口输入压力pi/kPa 500 工作电压U/V 24 线圈匝数N 200 励磁线圈阻值R/Ω 20 磁路工作气隙最大长度δl/m 0.000 1 工作气隙横截面直径D/m 0.007 动铁芯质量m/kg 0.005 动铁芯所受气压作用直径di/m 0.004 运动阻尼系数Ci/(N·s·m-1) 0.2 膜片质量m′/kg 0.008 膜片最大位移ximax′/m 0.001 进气膜片左侧受力直径dHl′/m 0.022 排气膜片左侧受力直径dRl′/m 0.04  下载: 导出CSV
下载: 导出CSV
表 2 制动性能参数的仿真值与试验值对比
Table 2. Comparison of simulation values and test values of braking performance parameters
参数 仿真 试验 误差 制动距离 713.42 m 712.09 m 0.19% 制动时间 44.82 s 44.72 s 0.22% 平均减速度 0.541 m/s2 0.542 m/s2 0.18%
下载: 导出CSV
表 3 不同滑动间隔下的仿真与试验滑动量总和误差结果
Table 3. Error results of the sum of simulation and test sliding momentum at different sliding intervals
滑动间隔 车轴 ASsim/% ASreal/% erroraxle-n/% E/% 0≤S<5% 1 48.84 37.36 30.72 19.19 2 46.12 56.04 17.70 3 45.86 53.85 14.83 4 46.15 53.35 13.50 5%≤S<10% 1 42.98 42.76 0.52 18.96 2 43.53 33.07 31.63 3 43.71 35.26 23.94 4 43.78 36.56 19.74 10%≤S<20% 1 7.55 19.38 61.02 17.82 2 9.64 9.99 3.48 3 9.20 9.79 5.99 4 9.06 8.99 0.79 20%≤S<30% 1 0.63 0.50 25.70 16.73 2 0.71 0.90 21.47 3 1.23 1.10 11.52 4 1.01 1.10 8.22 30%≤S 1 0.00 0.00 - - 2 0.00 0.00 - 3 0.00 0.00 - 4 0.00 0.00 -
下载: 导出CSV
-
[1] 韦皓. 动车组超低黏着轨面制动防滑性能试验研究[J]. 铁道学报, 2017, 39(9): 67-73. https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201709010.htmWEI H. EMU anti-slide performance experimental study on ultra-low adhesion rail surface[J]. Journal of the China Railway Society, 2017, 39(9): 67-73. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TDXB201709010.htm [2] 马天和, 吴萌岭, 田春. 基于黏着力观测器的列车空气制动防滑控制[J]. 同济大学学报(自然科学版), 2020, 48(11): 1668-1675. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ202011016.htmMA T H, WU M L, TIAN C. Anti-skid control based on adhesion force observer for train pneumatic braking[J]. Journal of Tongji University (Natural Science), 2020, 48(11): 1668-1675. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ202011016.htm [3] 李邦国, 范荣巍, 杨伟君, 等. 高速动车组制动防滑阀建模及仿真分析[J]. 铁道机车车辆, 2011, 31(5): 128-131. doi: 10.3969/j.issn.1008-7842.2011.05.032LI B G, FAN R W, YANG W J, et al. Modeling and simulation analysis of anti-skid valve[J]. Railway Locomotive & Car, 2011, 31(5): 128-131. (in Chinese) doi: 10.3969/j.issn.1008-7842.2011.05.032 [4] 胡晓峰, 闫富菊, 郭斌, 等. 高速机车防滑阀动特性仿真及测试方法研究[J]. 仪器仪表学报, 2019, 40(11): 250-259. https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201911030.htmHU X F, YAN F J, GUO B, et al. Dynamic characteristics simulation and test method for the high speed locomotive anti-skid valve[J]. Chinese Journal of Scientific Instrument, 2019, 40(11): 250-259. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201911030.htm [5] LUO Z J, WU M L, ZUO J Y, et al. Modelling and model validation of an electropneumatic brake on subway trains[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2016, 230(2): 374-391. doi: 10.1177/0954409714542860 [6] ZHU W L, DIAO F, WU M L. Modeling and anti-skid control of the rail vehicle braking system[C]//Proceedings of the 6th International Conference on Advanced Design and Manufacturing Engineering (ICADME 2016). Atlantis Press, 2016: 582-590. [7] TURABIMANA P, SOSTHENE K, MUSABYIMANA J. Modeling and simulation of anti-skid control system of railway vehicle in curved track[J]. European Mechanical Science, 2020, 4(4): 158-165. doi: 10.26701/ems.703079 [8] 刁锋, 朱文良, 秦凌光, 等. 基于有限状态机的轨道交通车辆防滑控制建模仿真与验证[J]. 城市轨道交通研究, 2019, 22(1): 55-59. https://www.cnki.com.cn/Article/CJFDTOTAL-GDJT201901015.htmDIAO F, ZHU W L, QIN L G, et al. Modeling simulation and verification of railway vehicle anti-sliding control based on finite state machine[J]. Urban Mass Transit, 2019, 22(1): 55-59. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GDJT201901015.htm [9] ZHU X Y, WU M L, TIAN C, et al. Simulation research of anti-sliding control of urban rail brake system based on AMESim and Simulink[J]. Applied Mechanics and Materials, 2014, 666: 175-178. [10] TB/T 3009-2019, 机车车辆制动系统用防滑装置[S]. 北京: 中国铁道出版社, 2019.TB/T 3009-2019, Anti-skid device of brake system for rolling stock[S]. Beijing: China Railway Press, 2019. (in Chinese) [11] BS EN 15595-2011, Railway applications braking wheel slide protection[S]. London: CEN Management Centre, 2011. [12] Taghizadeh M, Ghaffari A, Najafi F. Modeling and identification of a solenoid valve for PWM control applications[J]. Comptes rendus-Mécanique, 2009, 337(3): 131-140. [13] Bu F P, Tan H S. Pneumatic brake control for precision stopping of heavy-duty vehicles[J]. IEEE Transactions on Control Systems Technology, 2006, 15(1): 53-64. [14] 朱文良, 吴萌岭, 田春, 等. 基于多学科协同分析的轨道车辆制动系统集成化仿真平台[J]. 交通运输工程学报, 2017, 17(3): 99-110. https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201703011.htmZhu W L, Wu M L, Tian C, et al. Integrated simulation platform analysis for braking system of rolling stock based on multi-discipline collaborative analysis[J]. Journal of Traffic and Transportation Engineering, 2017, 17(3): 99-110. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JYGC201703011.htm [15] Zhu W L, Zhu W J, Zheng S B, et al. An improved degraded adhesion model for wheel-rail under braking conditions[J]. Industrial Lubrication and Tribology, 2021, 73(3): 450-456. -



 点击查看大图
点击查看大图

计量
- 文章访问数: 43
- HTML全文浏览量: 59
- PDF下载量: 14
- 被引次数: 0
