




Dynamic Simulation Analysis of Ground Penetrating Radar Robot for Underground Pipeline Detection
-
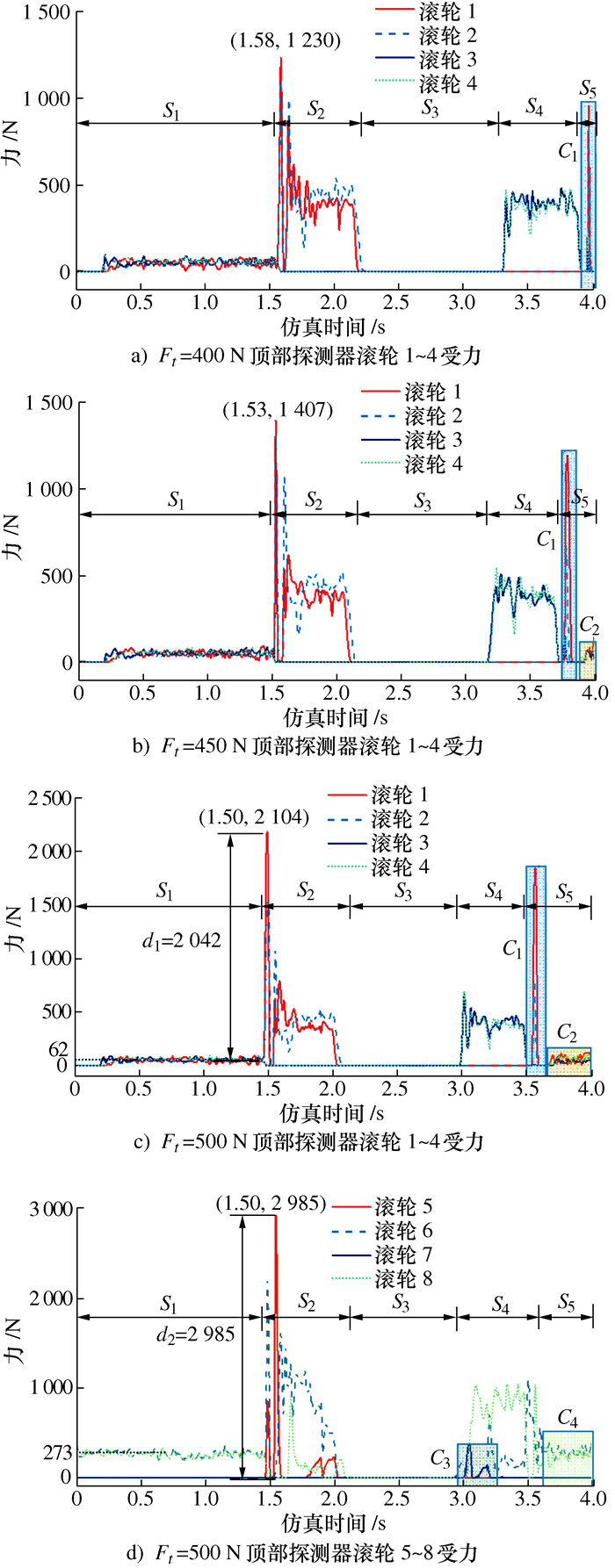
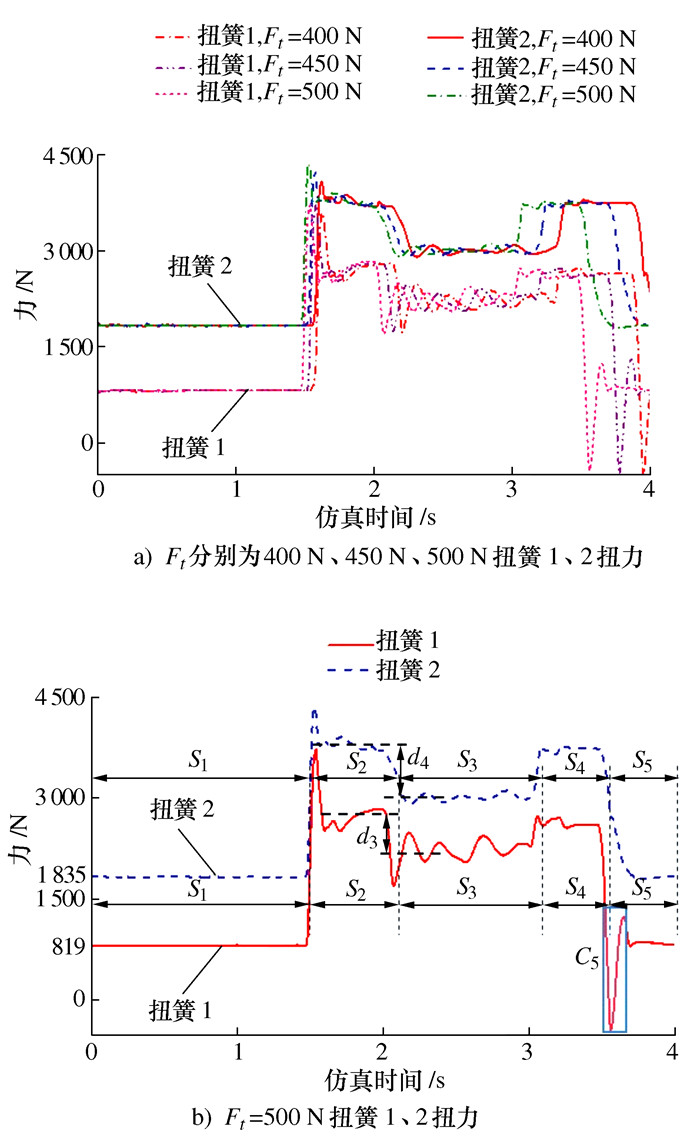
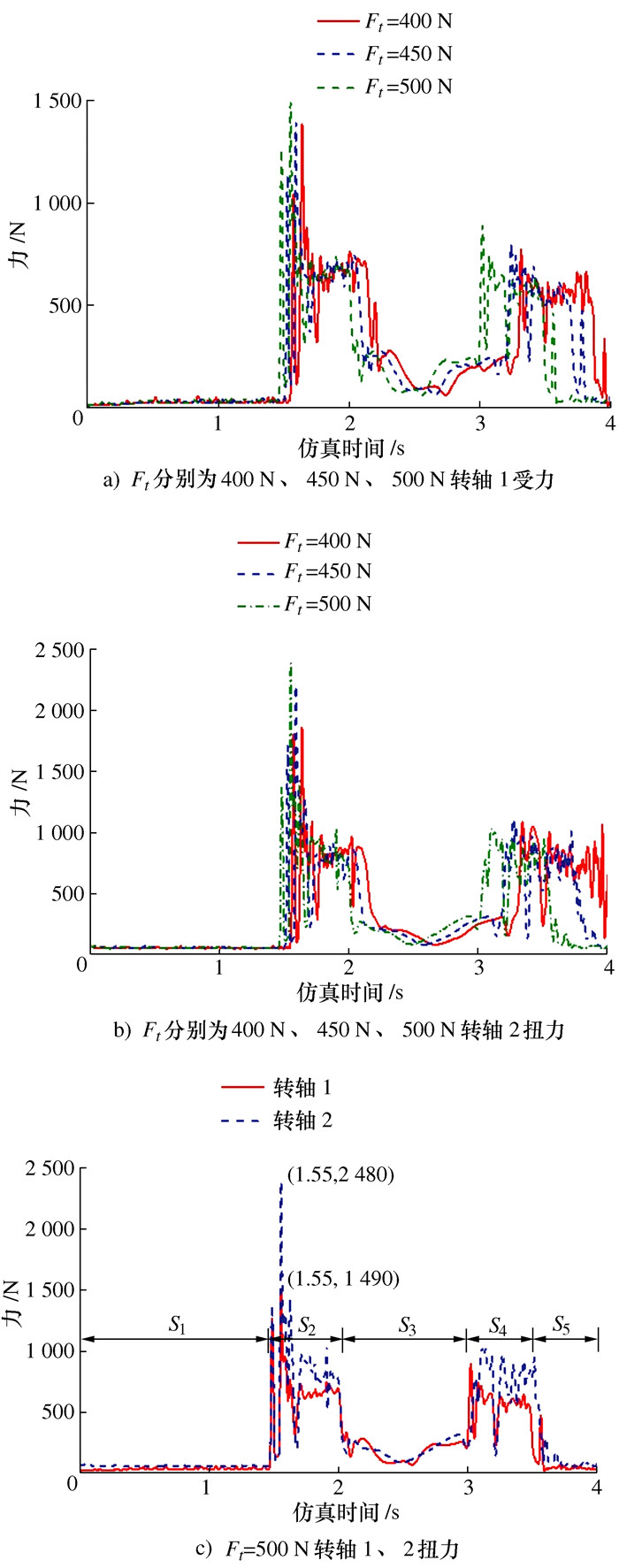
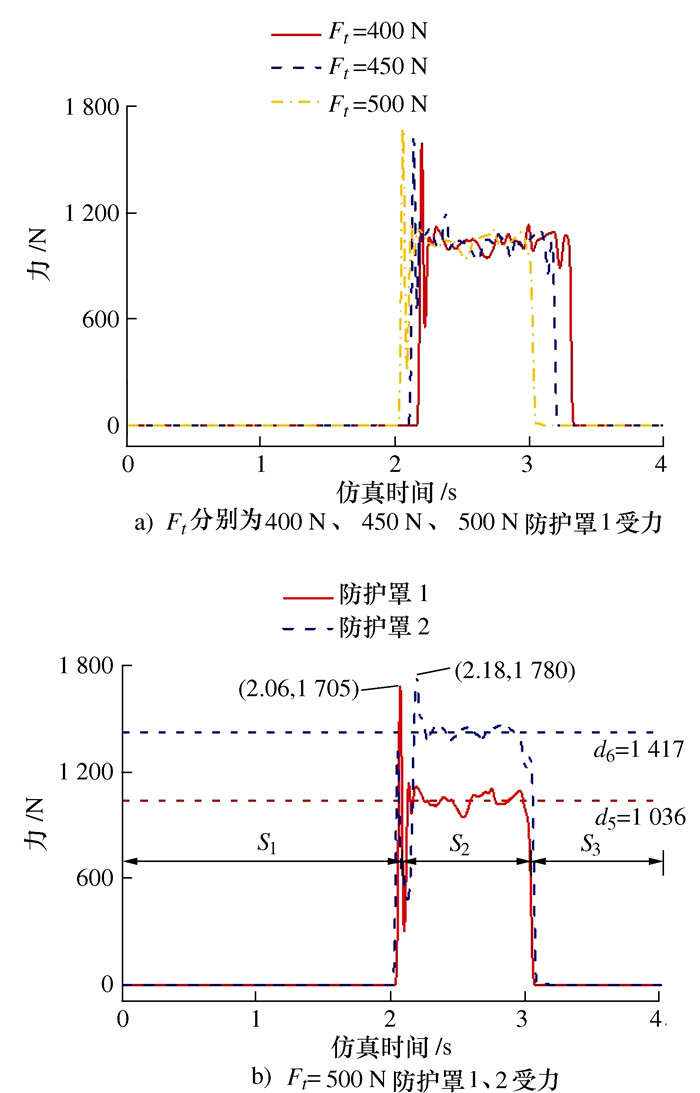
摘要: 地下管道地质雷达检测机器人有效解决了地下管道管内外病害综合检测问题,而机器人的动力学分析是实现机械结构优化和性能改善的基础。对600 mm地下排水管道地质雷达检测机器人开展Adams下的动力学仿真和仿真结果的实测试验验证,分析机器人工作在管道内壁有障碍物时,滚轮、扭簧、摇杆转轴和防护罩等关键部件的受力情况。结果表明:底部探测器关键部件的全程受力大小和过障碍物时的受力振幅均高于顶部探测器;底部探测器滚轮受力差异较大,偏上滚轮在未遇障碍物时不起作用,承载力集中在下侧滚轮;机器人受500 N水平牵引力作用,遇障物瞬间关键部件的受力呈3~60倍激增,防护罩承载达1 700 N冲击力。分析结果为地下管道地质雷达检测机器人优化设计,尤其是不同位置探测器的关键部件设计、选材和加工提供了依据。Abstract: Underground pipeline detection robot (UPDR) equipped with ground penetrating radar (GPR) can effectively realize the comprehensive detection of underground pipeline′s internal and external diseases. In order to improve its performance and mechanical structure, dynamic analysis should be firstly operated. In this paper, dynamic simulation analysis of GPR-UPDR for 600 mm pipeline based on Adams and experimental verification of simulation results are carried out. In detail, the stress of robot′s key components, such as rolling wheels, torsional springs, axles of rocker and antenna shells are analyzed, when it works in the underground pipeline with obstacles on inner wall. The results show that the stress in the whole process and its variation amplitude at the stage of passing through obstacles of bottom detectors′ key components are greater than those of top detector. The stress of bottom detectors′ rolling wheels has great differences. Specifically, the upper rolling wheels of bottom detectors don′t work when they don′t contact with obstacles, and the whole force is concentrated on lower rolling wheels. In addition, when robot collides with raised obstacles, the stress of the mentioned key components increase immediately by 3~60 times with simulated traction of 500 N, and the antenna shell bears a great impact force of 1 700 N. The analysis results provide scientific basis for optimal design, material selection and machining process of GPR-UPDR, especially key components of detectors.
-
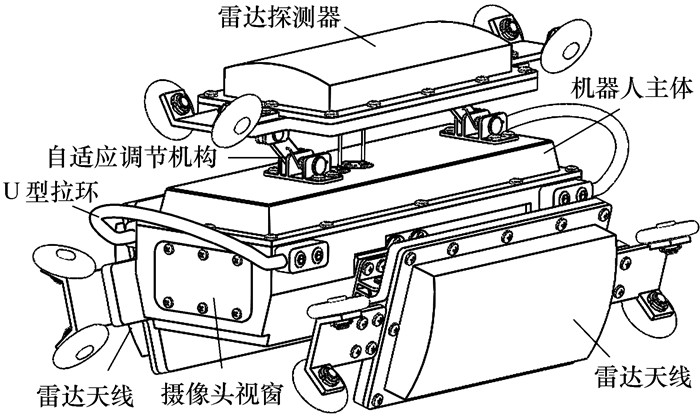
图 1 地下管道地质雷达检测机器人
Figure 1. The geological radar detection robot for underground pipelines
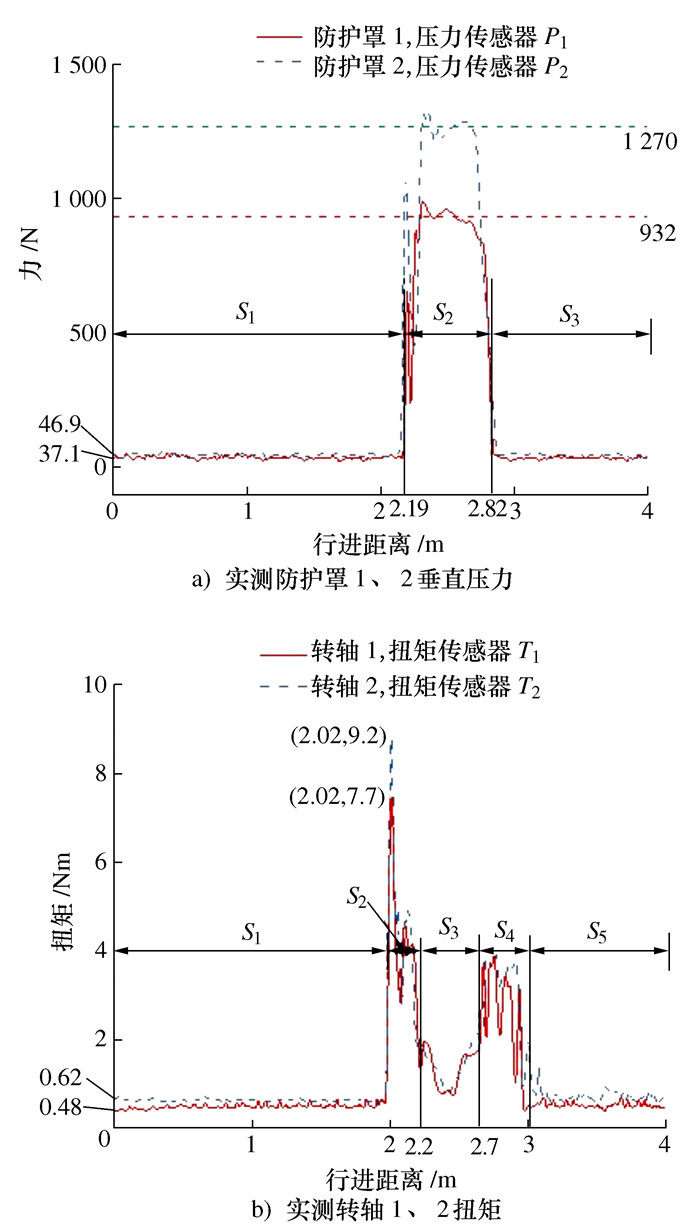
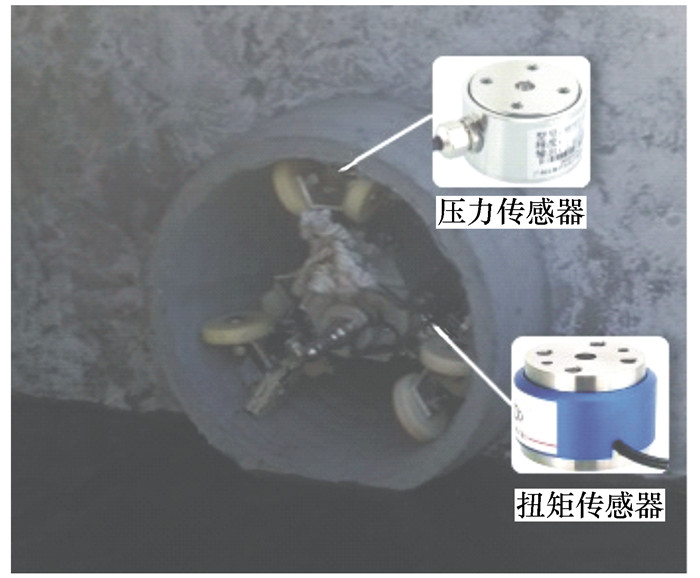
图 10 传感器关键部件受力实测结果
Figure 10. Actual measurements of the force applied to key sensor components
表 1 探测器关键部件编号对照表
Table 1. Correspondence table for key components of the detector
关键部件 位置 编号 滚轮 顶部、靠前、左侧 滚轮1 顶部、靠前、右侧 滚轮2 顶部、靠后、右侧 滚轮3 顶部、后方、左侧 滚轮4 右下测、靠前、偏上 滚轮5 右下测、靠前、偏下 滚轮6 右下测、靠后、偏上 滚轮7 右下测、靠后、偏下 滚轮8 扭簧 顶部、靠前 扭簧1 右下测、靠后 扭簧2 天线防护罩 顶部 防护罩1 右下测 防护罩2 摇杆转轴 顶部、靠前 转轴1 右下测、靠后 转轴2  下载: 导出CSV
下载: 导出CSV
-
[1] 易荣, 贾开国. 我国城市地下空间安全问题探讨[J]. 地质与勘探, 2020, 56(5): 1072-1079. https://www.cnki.com.cn/Article/CJFDTOTAL-DZKT202005016.htmYI R, JIA K G. Discussion on the safety of urban underground space in China[J]. Geology and Exploration, 2020, 56(5): 1072V1079. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DZKT202005016.htm [2] HAWARI A, ALAMIN M, ALKADOUR F, et al. Automated defect detection tool for closed circuit television (CCTV) inspected sewer pipelines[J]. Automation in Construction, 2018, 89: 99-109. doi: 10.1016/j.autcon.2018.01.004 [3] HALFAWY M R, HENGMEECHAI J. Integrated vision-based system for automated defect detection in sewer closed circuit television inspection videos[J]. Journal of Computing in Civil Engineering, 2015, 29(1): 04014024. doi: 10.1061/(ASCE)CP.1943-5487.0000312 [4] YANG H W, YANG Z K, PEI Y K. Ground-penetrating radar for soil and underground pipelines using the forward modeling simulation method[J]. Optik, 2014, 125(23): 7075-7079. doi: 10.1016/j.ijleo.2014.08.099 [5] 王雪静, 杨韶辉, 徐凡. 一种用于排水管道的探地雷达机器人: 中国, 106523852B[P]. 2019-03-22.WANG X J, YANG S H, XU F. A ground penetrating radar robot for drainage pipeline: CN, 106523852B[P]. 2019-03-22. (in Chinese) [6] 李涛涛, 杨峰, 徐茂轩, 等. 一种用于地下排水管道内检测的复合探头: 中国, 109490328A[P]. 2019-03-19.LI T T, YANG F, XU M X, et al. A composite probe for internal detection of underground drainage pipeline: CN, 109490328A[P]. 2019-03-19. (in Chinese) [7] 罗天洪, 李乔易, 马翔宇, 等. 管道疏通机器人非结构环境下多模态感知研究[J]. 机械科学与技术, 2018, 37(5): 683-689. doi: 10.13433/j.cnki.1003-8728.2018.0505LUO T H, LI Q Y, MA X Y, et al. Multi-modal cognitive strategy research for plumbing robot under unstructured environment[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(5): 683-689. (in Chinese) doi: 10.13433/j.cnki.1003-8728.2018.0505 [8] 张翔宇, 包瑞新, 陈保东, 等. 超稠油环境下管道内修复机器人流场分析[J]. 机械科学与技术, 2020, 39(12): 1889-1897. doi: 10.13433/j.cnki.1003-8728.20200002ZHANG X Y, BAO R X, CHEN B D, et al. Analysis of flow field for repairing robots in pipes under super heavy oil environment[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(12): 1889-1897. (in Chinese) doi: 10.13433/j.cnki.1003-8728.20200002 [9] 周利坤, 刘宏昭, 李悦. 清洗机器人研究现状与关键技术综述[J]. 机械科学与技术, 2014, 33(5): 635-642. doi: 10.13433/j.cnki.1003-8728.2014.0503ZHOU L K, LIU H Z, LI Y. Summary for the key technologies and research status of the cleaning robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2014, 33(5): 635-642. (in Chinese) doi: 10.13433/j.cnki.1003-8728.2014.0503 [10] 于晶晶, 路懿. 一种新型管道机器人的运动学及静力学分析[J]. 机械科学与技术, 2017, 36(10): 1530-1535. doi: 10.13433/j.cnki.1003-8728.2017.1008YU J J, LU Y. Kinematics and statics analysis of an novel pipeline robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(10): 1530-1535. (in Chinese) doi: 10.13433/j.cnki.1003-8728.2017.1008 [11] 李颖欣, 刘满禄, 李新茂. 管道检测机器人机构ADAMS动力学仿真分析[J]. 机械设计与制造, 2020(10): 243-247. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ202010057.htmLI Y X, LIU M L, LI X M. ADAMS dynamics simulation analysis of pipeline detection robot[J]. Machinery Design & Manufacture, 2020(10): 243-247. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ202010057.htm [12] SCHEMPF H, MUTSCHLER E, GAVAERT A, et al. Visual and nondestructive evaluation inspection of live gas mains using the ExplorerTM family of pipe robots[J]. Journal of Field Robotics, 2010, 27(3): 217-249. [13] 薛耀勇, 张继忠, 王庆前, 等. 基于Adams的管道机器人自适应机构优化设计[J]. 青岛大学学报(工程技术版), 2020, 35(1): 33-38. https://www.cnki.com.cn/Article/CJFDTOTAL-QDDX202001011.htmXUE Y Y, ZHANG J Z, WANG Q Q, et al. Optimization design of pipeline robot adaptive mechanism based on Adams[J]. Journal of Qingdao University (E & T), 2020, 35(1): 33-38. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QDDX202001011.htm [14] 闫宏伟, 崔子梓, 焦彪彪, 等. 基于Adams螺旋驱动行走机构的弯管通过性能研究[J]. 机械设计, 2017, 34(12): 32-36. https://www.cnki.com.cn/Article/CJFDTOTAL-JXSJ201712006.htmYAN H W, CUI Z Z, JIAO B B, et al. Study on the elbow passing performance of spiral driving traveling mechanism based on Adams[J]. Journal of Machine Design, 2017, 34(12): 32-36. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXSJ201712006.htm [15] 罗继曼, 张东跃, 魏泽明, 等. 新型管道机器人运动学和力学特性分析[J]. 沈阳建筑大学学报(自然科学版), 2017, 33(2): 337-346. https://www.cnki.com.cn/Article/CJFDTOTAL-SYJZ201702018.htmLUO J M, ZHANG D Y, WEI Z M, et al. Analysis on kinematics and mechanics characteristics of a new type of pipeline robot[J]. Journal of Shenyang Jianzhu University (Natural Science), 2017, 33(2): 337-346. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SYJZ201702018.htm -


 点击查看大图
点击查看大图
图(10) / 表(1)
计量
- 文章访问数: 212
- HTML全文浏览量: 76
- PDF下载量: 56
- 被引次数: 0
