




Fast Solution of 6-axis Industrial Robot Workspace
-
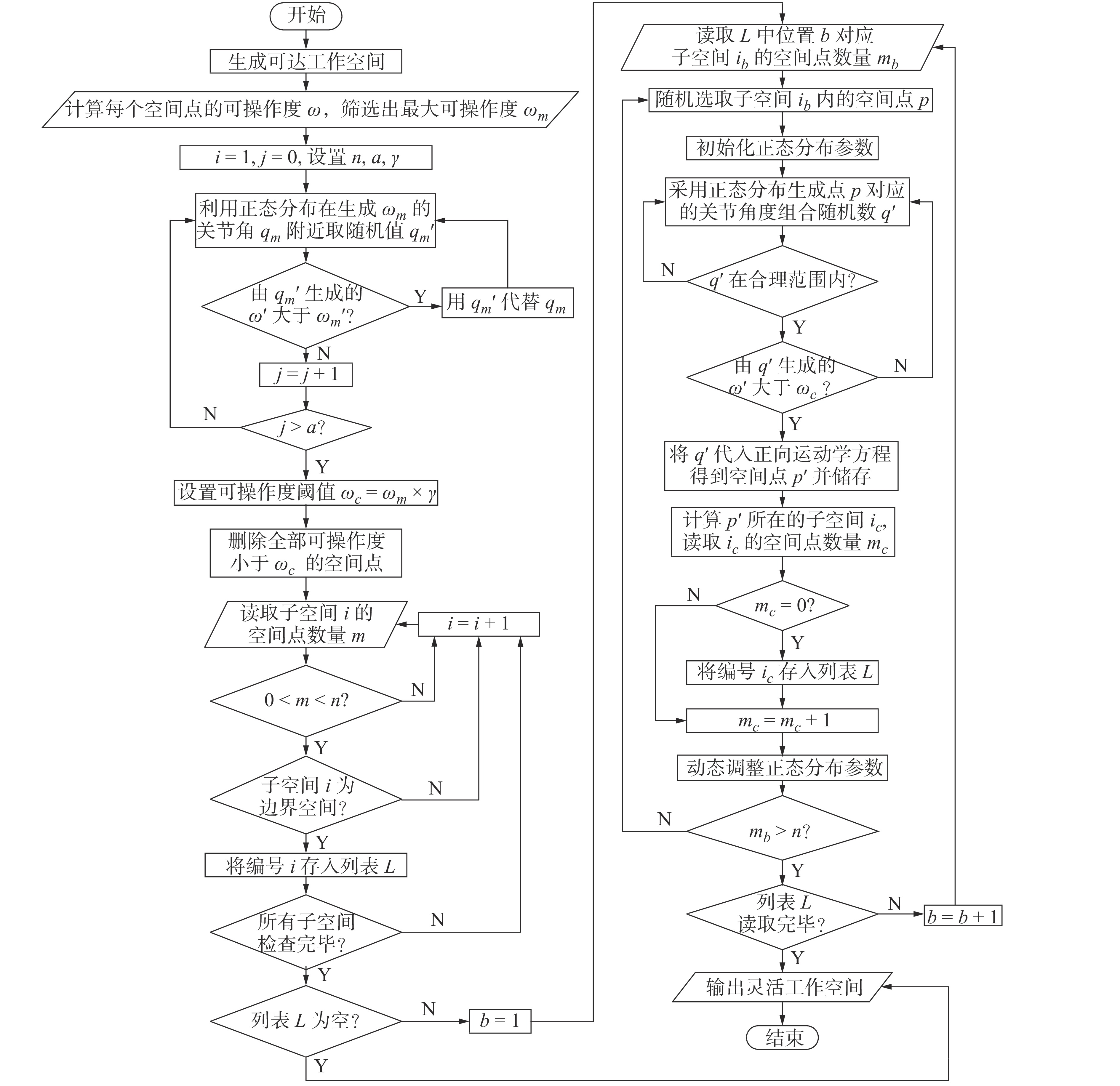
摘要: 由于机器人设计过程中需要反复计算机器人工作空间,提升工作空间的计算效率与精度具有重要意义。本文针对传统方法求解工作空间精度不高、速度慢的问题,提出了改进方法。用传统方法生成种子空间并离散为多个子空间,利用正态分布拓展工作空间点数量不足的子空间,并根据拓展后工作空间点的位置调整正态分布参数,得到可达工作空间。进一步,利用可操作度值评估机器人的灵活性,从可达工作空间筛选出灵活种子空间,利用可调参数的正态分布拓展灵活种子空间边界,得到灵活工作空间。以6轴机器人为对象,对本文方法进行仿真分析。结果表明,本文方法在保证求解精度的前提下可极大的提升求解效率,为后续的机器人优化设计提供了便利。Abstract: In the process of robot design, the robot workspace needs to be calculated repeatedly, so it is of great significance to improve the computational efficiency and accuracy of the workspace. An improved method to solve the problems of low precision and slow speed of the traditional method is proposed. The seed space is generated by the traditional method and discretized into multiple subspaces, the normal distribution is used to expand the subspace with insufficient number of workspace points, and the normal distribution parameters are adjusted according to the positions of the expanded workspace points to obtain the reachable workspace. Then, the operability value to evaluate the flexibility of the robot is used, the flexible seed space from the reachable workspace is filtered out, and the normal distribution of adjustable parameters to expand the boundary of the flexible seed space to obtain a flexible workspace is used. By taking the 6-axis robot as an example to simulate and analyze the improved method, the results show that the present method can greatly improve the solving efficiency on the premise of ensuring the solving accuracy, and provide convenience for the subsequent optimization design of the robot.
-
Key words:
- 6-axis robot /
- workspace /
- monte-carlo method /
- manipulability
-
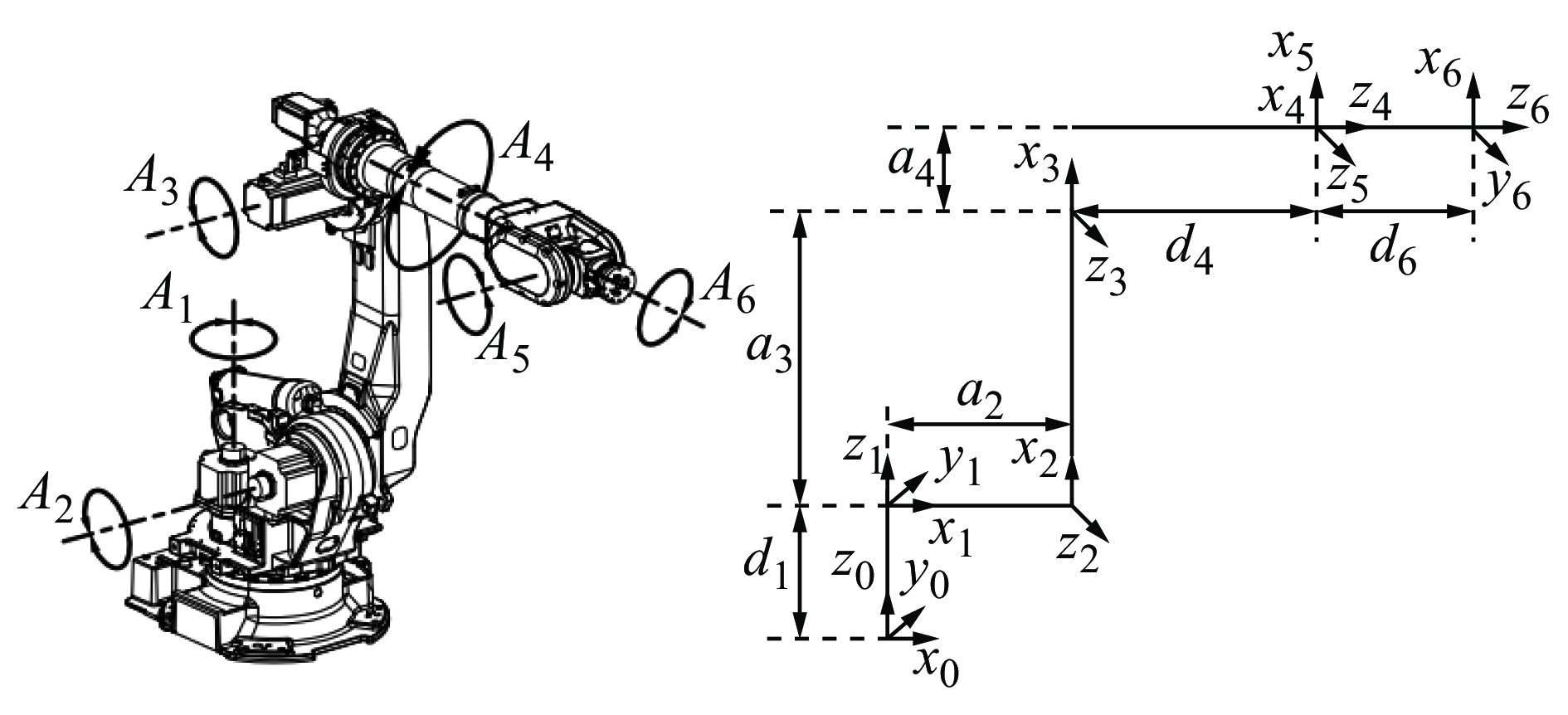
表 1 6轴机器人D-H参数表
Table 1. 6-axis robot D-H parameter table
${{i} }$ ${ {{d} }_{ {i} } }/{\rm{mm}}$ ${ {{a} }_i}/{\rm{mm}}$ ${\alpha _{i} }/(^\circ )$ ${\theta _{i} }/(^\circ )$ 1 700 0 0 $ {\theta _{\text{1}}} $ 2 0 305 90 $ {\theta _{\text{2}}} $ 3 0 1110 0 $ {\theta _{\text{3}}} $ 4 1260 200 90 $ {\theta _{\text{4}}} $ 5 0 0 −90 $ {\theta _{\text{5}}} $ 6 245 0 90 $ {\theta _{\text{6}}} $  下载: 导出CSV
下载: 导出CSV
表 2 6轴机器人关节运动范围
Table 2. Range of motion of 6-axis robot join
$ i $ 1 2 3 4 5 6 ${ {{q} }_{\max } }/(^\circ )$ + 185 + 140 + 168 + 350 + 125 + 350 ${ { {q} }_{ {{\rm{min} } } } }/(^\circ )$ −185 + 5 −120 −350 −125 −350
下载: 导出CSV
表 3 改进蒙特卡洛法参数设置
Table 3. Improved Monte Carlo method parameter Settings
${{N} }$ ${{k} }$ ${{n} }$ $ \sigma $ $ \delta $ ${{n} }_{{f} }^{ {\text{max} } }$ ${ {n} }_{{l} }^{ {\text{max} } }$ 10000 20 × 20
× 20150 $\text{π}/3$ 1.5 5 300
下载: 导出CSV
表 4 可达工作空间体积随工作空间点变化表
Table 4. Reachable workspace volume change table with workspace points
${{N} }$ $ 1 \times {10^5} $ $ 1 \times {10^6} $ $ 5 \times {10^6} $ $ 1 \times {10^7} $ $ 1.5 \times {10^7} $ $ 2 \times {10^7} $ $ V/{{\text{m}}^{\text{3}}} $ 64.422 72.524 74.358 74.856 75.166 75.238
下载: 导出CSV
-
[1] 刘志忠, 柳洪义, 罗忠, 等. 机器人工作空间求解的蒙特卡洛法改进[J]. 农业机械学报, 2013, 44(1): 230-235. doi: 10.6041/j.issn.1000-1298.2013.01.043LIU Z Z, LIU H Y, LUO Z, et al. Improvement on Monte Carlo method for robot workspace determination[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(1): 230-235. (in Chinese) doi: 10.6041/j.issn.1000-1298.2013.01.043 [2] 田勇, 王洪光, 潘新安, 等. 一种协作机器人工作空间灵活度的求解方法[J]. 机器人, 2019, 41(3): 298-306.TIAN Y, WANG H G, PAN X A, et al. A solving method for the workspace dexterity of collaborative robot[J]. Robot, 2019, 41(3): 298-306. (in Chinese) [3] 罗华, 徐建柱, 姚林, 等. 可满足微创手术灵活工作空间的混联机器人研究[J]. 四川大学学报(工程科学版), 2011, 43(4): 236-240. doi: 10.15961/j.jsuese.2011.04.030LUO H, XU J Z, YAO L, et al. Study on hybrid robot meeting the dexterous workspace demand of minimally invasive surgery[J]. Journal of Sichuan University (Engineering Science Edition), 2011, 43(4): 236-240. (in Chinese) doi: 10.15961/j.jsuese.2011.04.030 [4] SICILIANO B, KHATIB O. Springer handbook of robotics[M]. 2nd ed. Springer, 2016 [5] 王晓华, 王育合, 王文杰, 等. 缝纫机器人工作空间分析[J]. 机械科学与技术, 2020, 39(8): 1217-1221.WANG X H, WANG Y H, WANG W J, et al. Analyzing workspace of sewing robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(8): 1217-1221. (in Chinese) [6] 荆学东, 薛毓铨, 陈亚楠. 6R双臂服务机器人协作空间分析及参数优化[J]. 机械科学与技术, 2021, 40(6): 840-845. doi: 10.13433/j.cnki.1003-8728.20200122JING X D, XUE Y Q, CHEN Y N. Analyzing and optimizing parameters of 6R dual-arm service robot collaborative space[J]. Mechanical Science and Technology for Aerospace Engineering, 2021, 40(6): 840-845. (in Chinese) doi: 10.13433/j.cnki.1003-8728.20200122 [7] 赵智远, 徐振邦, 何俊培, 等. 基于工作空间分析的9自由度超冗余串联机械臂构型优化[J]. 机械工程学报, 2019, 55(21): 51-63.ZHAO Z Y, XU Z B, HE J P, et al. Configuration optimization of nine degree of freedom super-redundant serial manipulator based on workspace analysis[J]. Journal of Mechanical Engineering, 2019, 55(21): 51-63. (in Chinese) [8] 贾世元, 贾英宏, 徐世杰. 基于姿态可操作度的机械臂尺寸优化方法[J]. 北京航空航天大学学报, 2015, 41(9): 1693-1700.JIA S Y, JIA Y H, XU S J. Dimensional optimization method for manipulator based on orientation manipulability[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(9): 1693-1700. (in Chinese) [9] CAO Y, LU K, LI X J, et al. Accurate numerical methods for computing 2D and 3D robot workspace[J]. International Journal of Advanced Robotic Systems, 2011, 8(6): 1-13. [10] BOHIGAS O, MANUBENS M, ROS L. A complete method for workspace boundary determination on general structure manipulators[J]. IEEE Transactions on Robotics, 2012, 28(5): 993-1006. doi: 10.1109/TRO.2012.2196311 [11] 田海波, 马宏伟, 魏娟. 串联机器人机械臂工作空间与结构参数研究[J]. 农业机械学报, 2013, 44(4): 196-201. doi: 10.6041/j.issn.1000-1298.2013.04.034TIAN H B, MA H W, WEI J. Workspace and structural parameters analysis for manipulator of serial robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(4): 196-201. (in Chinese) doi: 10.6041/j.issn.1000-1298.2013.04.034 [12] PEIDRÓ A, REINOSO Ó, GIL A, et al. An improved Monte Carlo method based on Gaussian growth to calculate the workspace of robots[J]. Engineering Applications of Artificial Intelligence, 2017, 64: 197-207. doi: 10.1016/j.engappai.2017.06.009 [13] 徐振邦, 赵智远, 贺帅, 等. 机器人工作空间求解的蒙特卡洛法改进和体积求取[J]. 光学精密工程, 2018, 26(11): 2703-2713. doi: 10.3788/OPE.20182611.2703XU Z B, ZHAO Z Y, HE S, et al. Improvement of Monte Carlo method for robot workspace solution and volume calculation[J]. Optics and Precision Engineering, 2018, 26(11): 2703-2713. (in Chinese) doi: 10.3788/OPE.20182611.2703 [14] 李宪华, 盛蕊, 张雷刚, 等. 六自由度模块化机器人手臂奇异构型分析[J]. 农业机械学报, 2017, 48(7): 376-382. doi: 10.6041/j.issn.1000-1298.2017.07.048LI X H, SHENG R, ZHANG L G, et al. Singular configuration analysis of 6-DOF modular manipulator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(7): 376-382. (in Chinese) doi: 10.6041/j.issn.1000-1298.2017.07.048 [15] 李宪华, 孙青, 张雷刚, 等. 服务机器人双臂协调操作的灵活性分析[J]. 华中科技大学学报(自然科学版), 2019, 47(5): 33-38.LI X H, SUN Q, ZHANG L G, et al. Flexibility analysis of coordination operation of dual-arm service robot[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2019, 47(5): 33-38. (in Chinese) [16] XU R N, LUO J J, WANG M M. Optimal grasping pose for dual-arm space robot cooperative manipulation based on global manipulability[J]. Acta Astronautica, 2021, 183: 300-309. doi: 10.1016/j.actaastro.2021.03.021 -




 点击查看大图
点击查看大图

图(6) / 表(4)
计量
- 文章访问数: 138
- HTML全文浏览量: 316
- PDF下载量: 49
- 被引次数: 0
