




QPSO-RBFNN Control of Chaotic Motion of A Class of Vibro-impact System
-
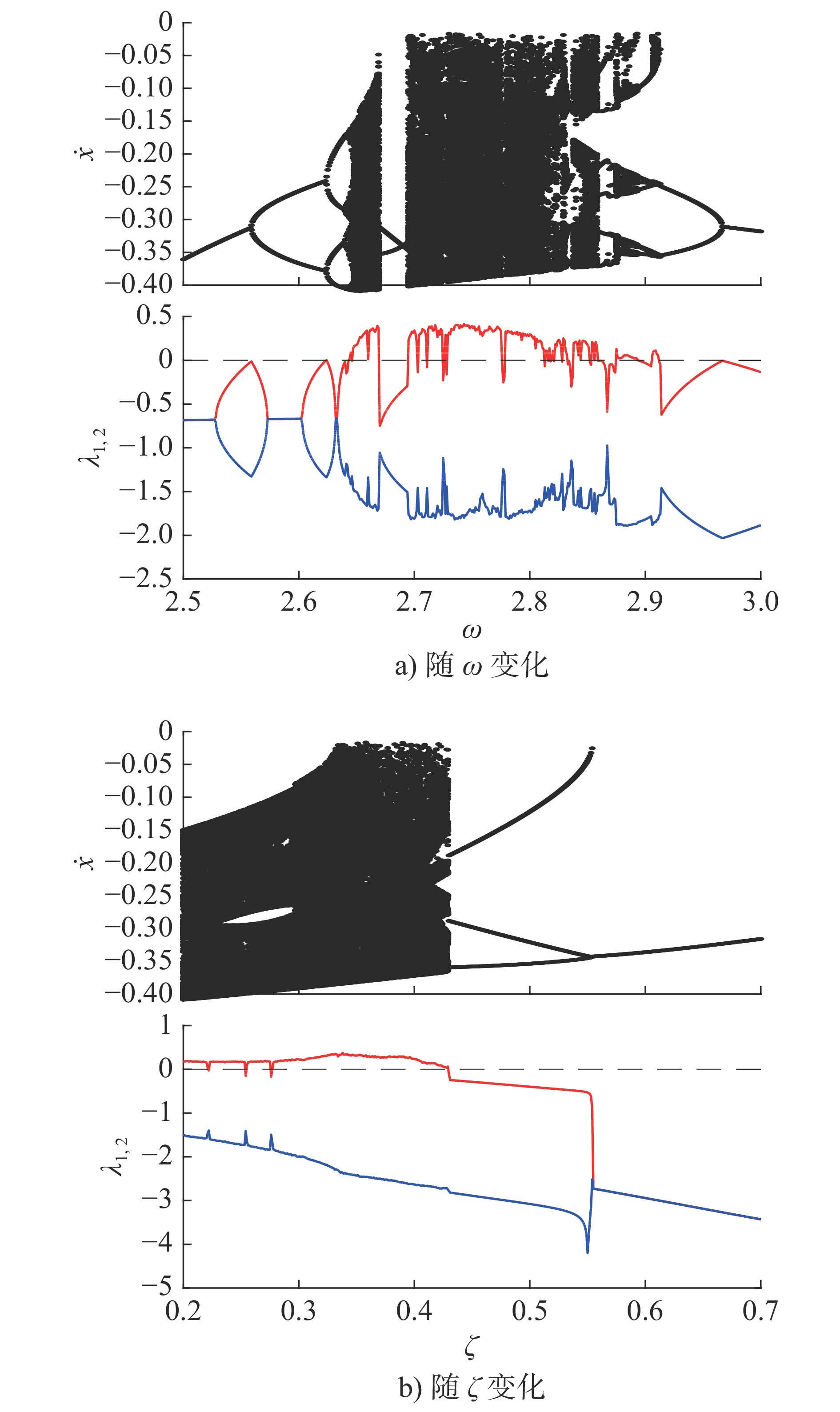
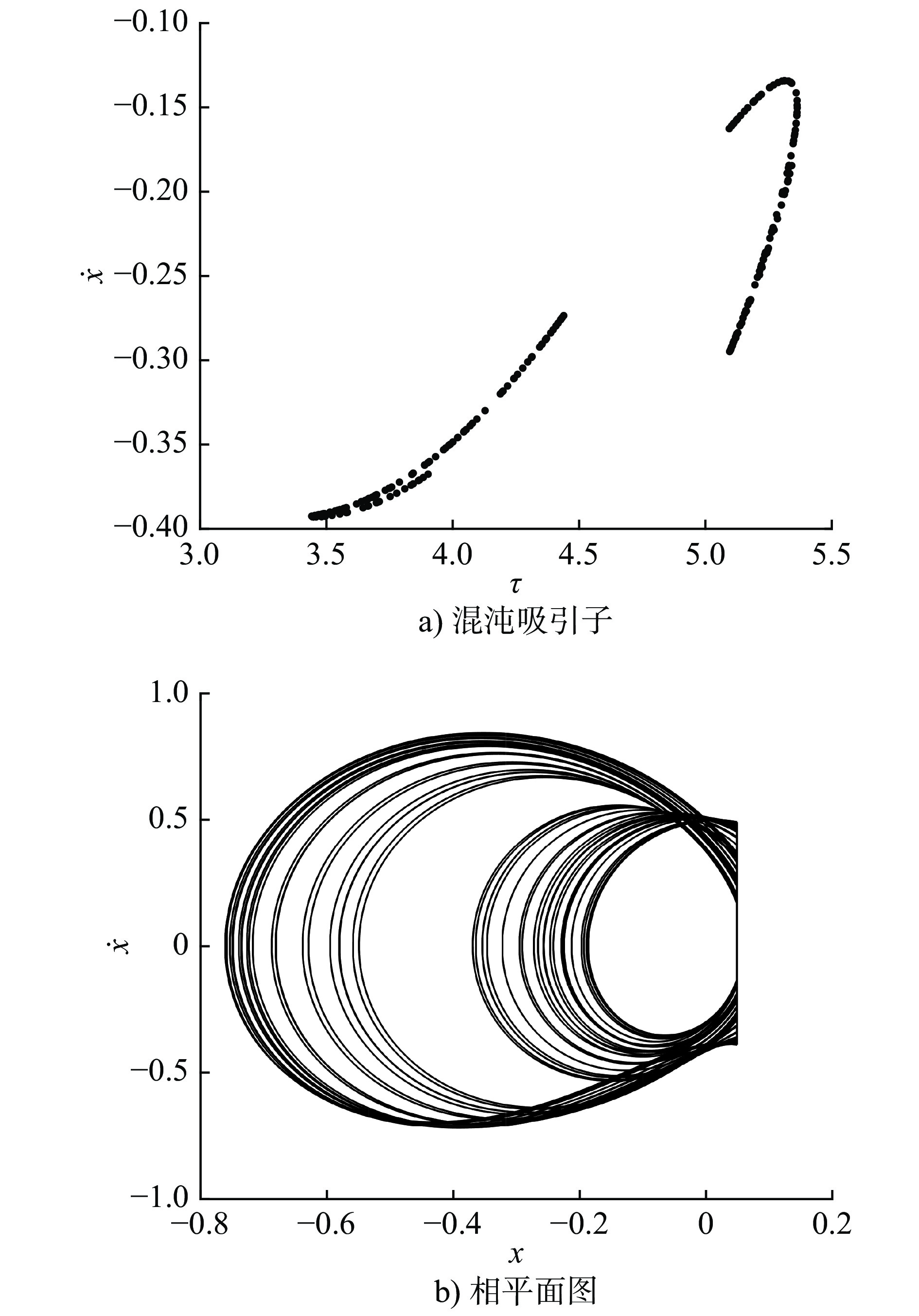
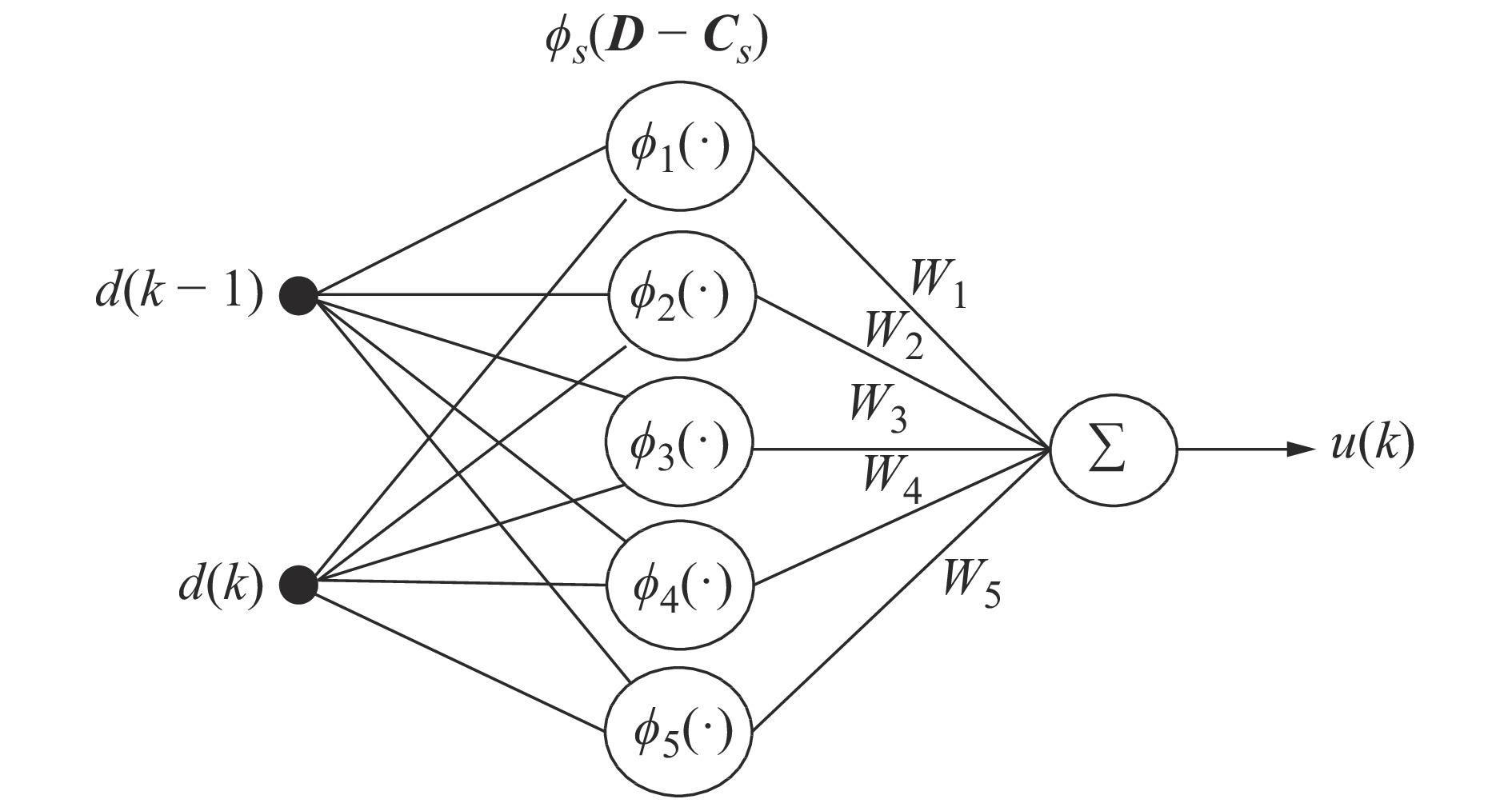
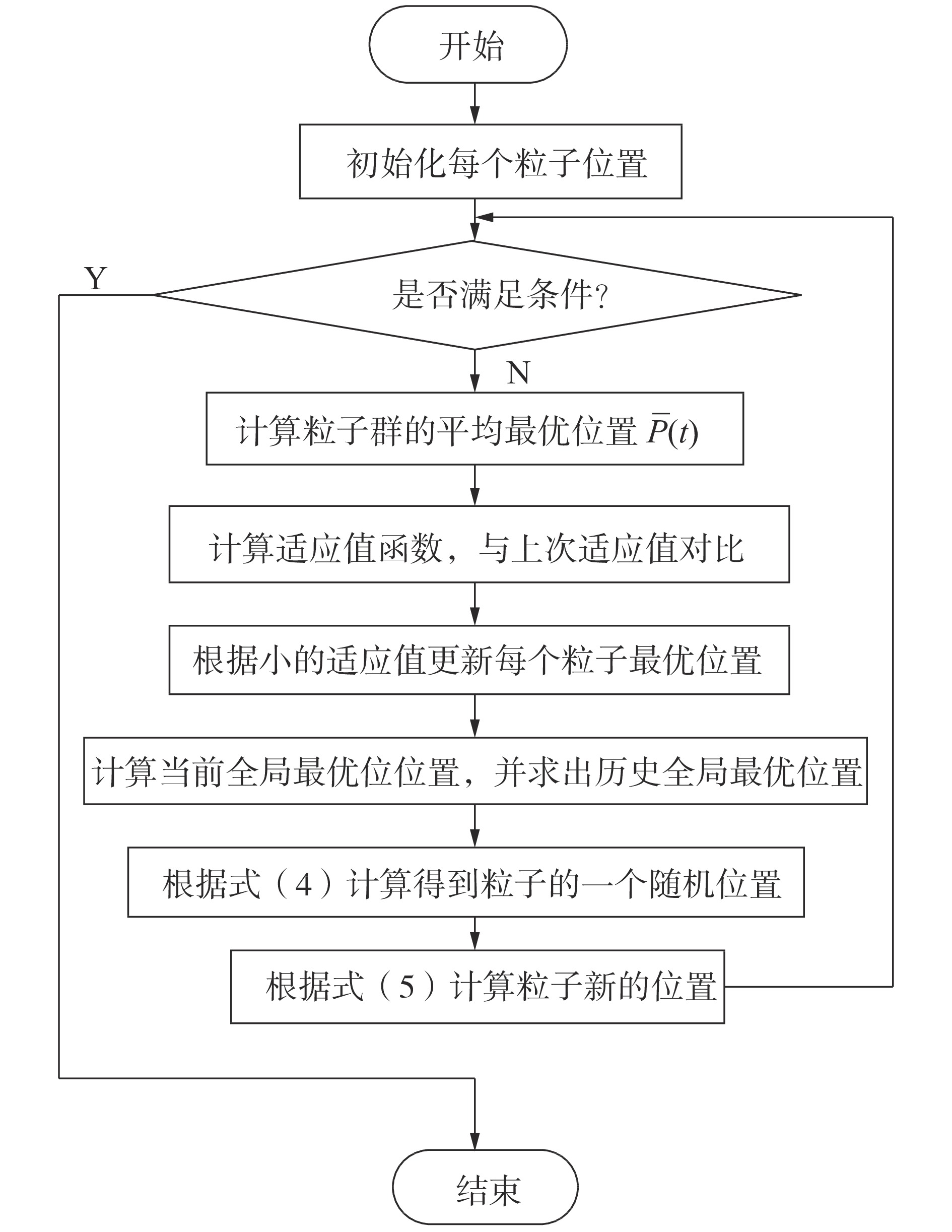
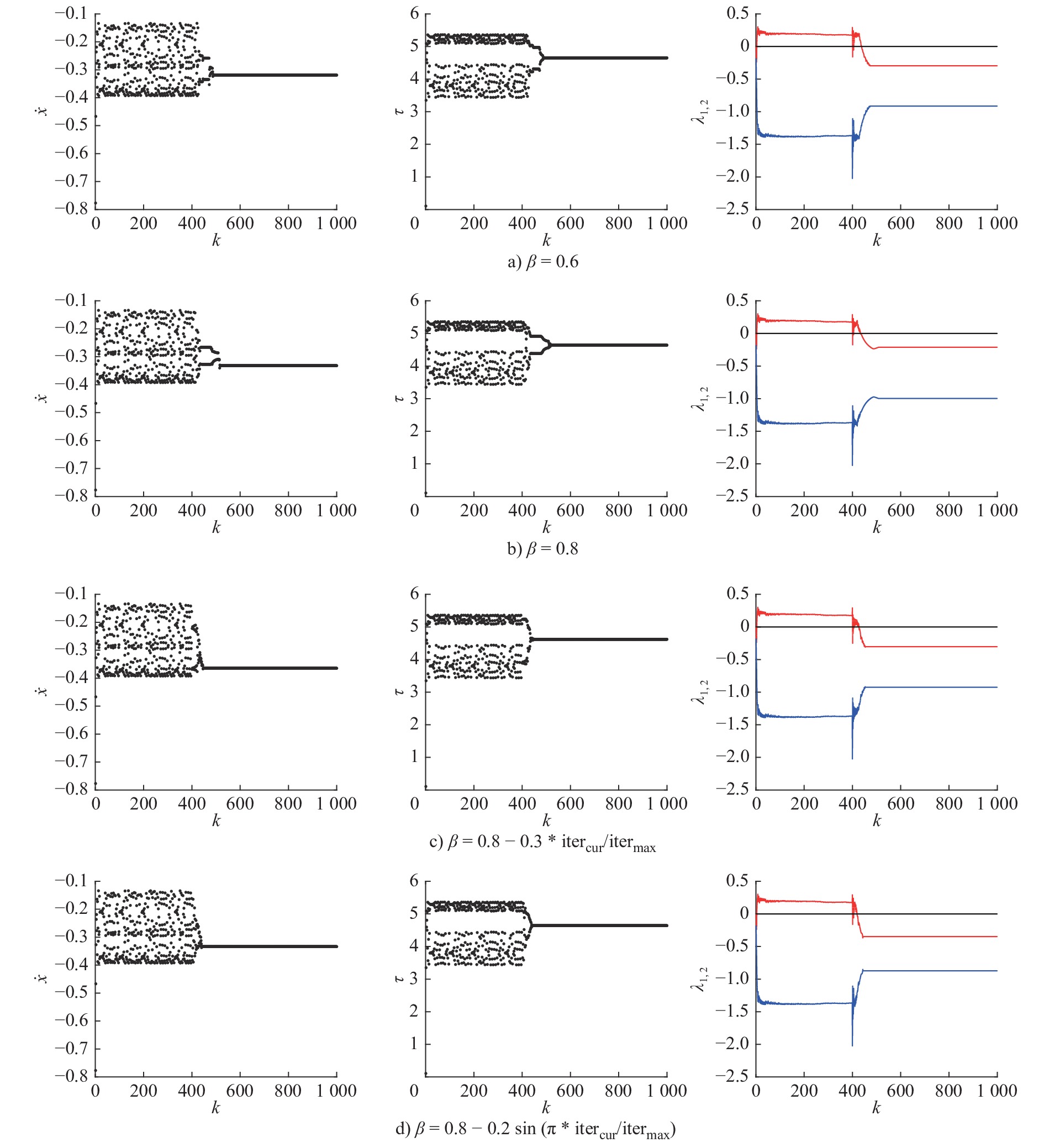
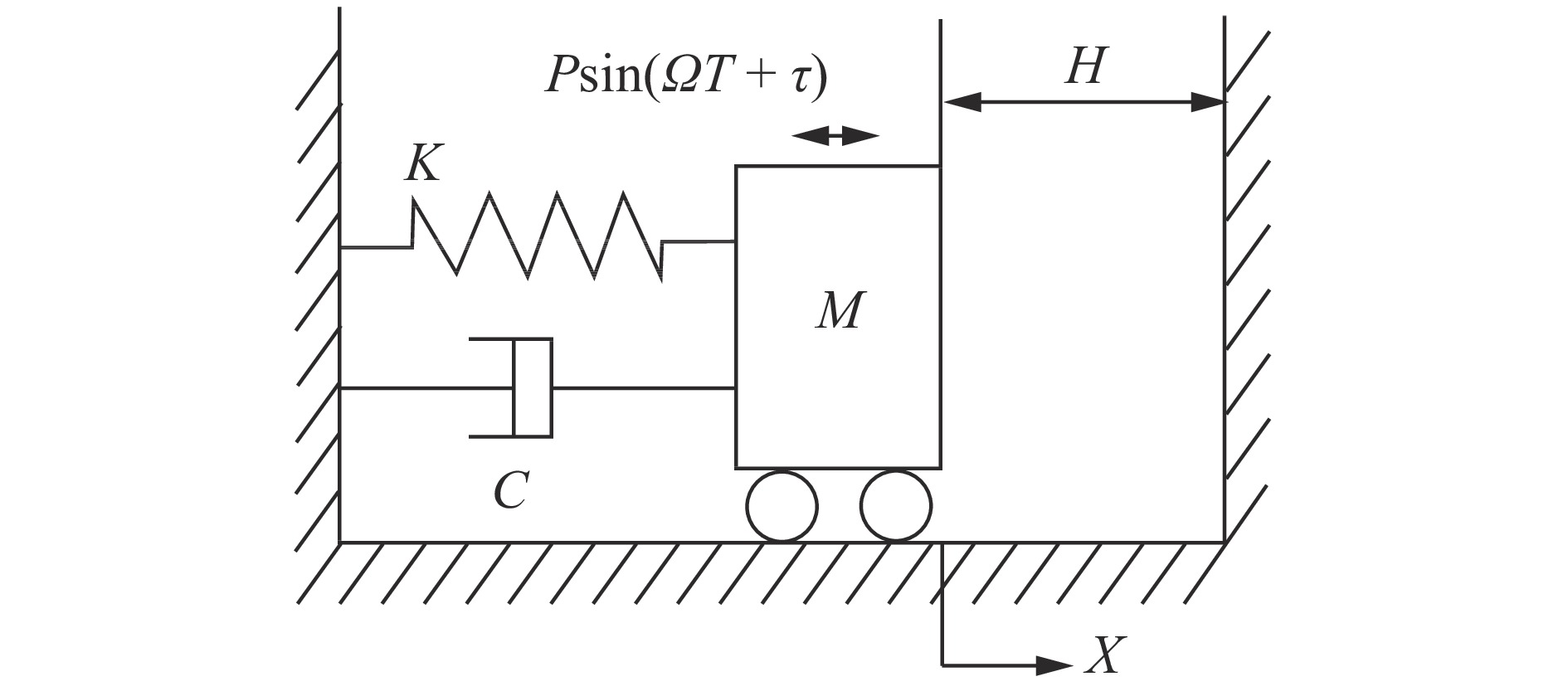
摘要: 针对难以建立精确数学模型时的碰撞振动系统混沌运动控制问题,提出一种采用QPSO算法优化RBFNN的参数反馈混沌控制方法。利用分岔图、Lyapunov指数谱图、Poincaré截面图和相图分析了混沌运动与系统特定参数条件间的关联关系及表现特征,基于RBFNN设计了参数反馈混沌控制器,并将最大Lyapunov指数作为加权项构建适应度函数,以引导QPSO算法优化控制器的参数并量化评价混沌控制效果。仿真研究中,进一步分析了QPSO算法的控制参数(即收缩扩张系数)对混沌控制效果的影响。
-
关键词:
- 碰撞振动系统 /
- 混沌控制 /
- QPSO /
- RBFNN /
- Lyapunov指数
Abstract: Aiming at the chaos control problem for a single-degree-of-freedom vibro-impact system with clearance, a parameter feedback control method of chaotic motion based on RBFNN (radial basis function neural network) optimized by QPSO (quantum particle swarm optimization) algorithm is proposed in this paper. The correlation relationship and its characteristics between the chaotic motion and specific parameters of the system were analyzed by using bifurcation diagram, Lyapunov exponential spectrum diagram, Poincare cross section diagram and phase diagram. A parameter feedback chaos controller was designed based on RBFNN, and the maximum Lyapunov exponent was used as a weighted term to construct a fitness function, so as to guide the QPSO algorithm to optimize the parameters of the controller and quantitatively evaluate the chaos control effect. In the simulation experiment, the influence of QPSO control parameters (i.e., shrinkage and expansion coefficient) on chaos control effect is further analyzed and studied.-
Key words:
- vibro-impact system /
- chaos control /
- QPSO /
- radial basis function neural network /
- Lyapunov exponent
-
表 1 混沌控制器参数(周期1-1)
${\boldsymbol{C}}_s$ $ \sigma_{N s}$ $W_s $ (0.1795,−1.1645) 0.6350 −8.0733 (0.2231,−0.4372) 0.1184 −0.5523 (−0.4254,−0.4052) 0.1830 −0.8509 (−0.4425,1.6008) −0.0409 −0.2863 (1.1832,−0.5153) 0.3877 0.2891  下载: 导出CSV
下载: 导出CSV
表 2 混沌控制器参数(周期2-2)
${\boldsymbol{C}}_s$ $ \sigma_{N s}$ $W_s $ (0.5191,0.3063) 0.6091 0.5389 (0.1144, 0.6170) 0.1277 2.0994 (0.4045,−0.0706) −0.1243 −0.6290 (0.0882,1.0141) 0.6404 6.1557 (0.3227, 0.6336) 0.3842 0.2338
下载: 导出CSV
表 3 混沌控制器参数(周期2-1)
${\boldsymbol{C}}_s$ $ \sigma_{N s}$ $W_s $ (0.0822,0.4005) 0.5555 0.8024 (0.2057,−0.1568) 0.2081 −0.3729 (0.3680,0.3056) 0.2986 −0.0684 (0.0085,0.6106) 0.6763 −0.1623 (0.5535,−0.4525) 0.7604 0.8976
下载: 导出CSV
表 4 混沌控制器参数(周期4-3)
${\boldsymbol{C}}_s$ $ \sigma_{N s}$ $W_s $ (1.7086,0.3532) 0.3858 0.5842 (−4.3006,−0.6096) 0.8062 −6.1667 (0.7322,−0.2861) 0.7360 0.7505 (0.2888,0.7278) 0.4543 −0.3622 (0.3488,1.4199) 0.3661 0.4751
下载: 导出CSV
-
[1] 乐源. 一类碰撞振动系统在内伊马克沙克-音叉分岔点附近的局部两参数动力学[J]. 力学学报, 2016, 48(1): 163-172. doi: 10.6052/0459-1879-15-144YUE Y. Local dynamical behavior of two-parameter family near the Neimark-sacker-pitchfork bifurcation point in a vibro-impact system[J]. Chinese Journal of Theoretical and Applied Mechanics, 2016, 48(1): 163-172. (in Chinese) doi: 10.6052/0459-1879-15-144 [2] 丁杰, 王超, 丁旺才, 等. 双侧不同约束碰振系统的周期运动转迁规律[J]. 华中科技大学学报(自然科学版), 2021, 49(1): 6-11.DING J, WANG C, DING W C, et al. The transition law of periodic motions of the vibro-impact system with different constraints on both sides[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2021, 49(1): 6-11. (in Chinese) [3] 张晨旭, 杨晓东, 张伟. 含间隙齿轮传动系统的非线性动力学特性的研究[J]. 动力学与控制学报, 2016, 14(2): 115-121.ZHANG C X, YANG X D, ZHANG W. Study on non-linear dynamics of gear transmission system with clearance[J]. Journal of Dynamics and Control, 2016, 14(2): 115-121. (in Chinese) [4] 吴鑫, 乐源. 一类悬臂梁双侧碰撞系统的全局动力学研究[J]. 重庆理工大学学报(自然科学), 2020, 34(1): 140-147.WU X, YUE Y. Global dynamic research of a cantilever system with both-sided impacts[J]. Journal of Chongqing University of Technology (Natural Science), 2020, 34(1): 140-147. (in Chinese) [5] 吴丹, 丁旺才. 含干摩擦碰撞系统的簇发振荡及稳定性分析[J]. 华中科技大学学报(自然科学版), 2020, 48(3): 46-51.WU D, DING W C. Bursting oscillations and stability analysis of dry friction-impact vibration system[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2020, 48(3): 46-51. (in Chinese) [6] KUNDU S, BANERJEE S, ING J, et al. Singularities in soft-impacting systems[J]. Physica D:Nonlinear Phenomena, 2012, 241(5): 553-565. doi: 10.1016/j.physd.2011.11.014 [7] 田亚平, 徐璐, 宋佩颉, 等. 基于OGY的含间隙单级齿轮系统混沌运动控制[J]. 振动与冲击, 2020, 39(14): 17-21.TIAN Y P, XU L, SONG P J, et al. Chaos control of a single-stage spur gear system with backlash based on the OGY method[J]. Journal of Vibration and Shock, 2020, 39(14): 17-21. (in Chinese) [8] 张曹辉. 含间隙碰撞振动系统混沌运动的SVM控制[D]. 兰州: 兰州交通大学, 2019: 21-47ZHANG C H. Chaos control of vibro-impact systems with clearance based on SVM[D]. Lanzhou: Lanzhou Jiaotong University, 2019: 21-47. (in Chinese) [9] 李松涛, 李群宏, 张文. 三自由度碰撞振动系统的余维二擦边分岔与混沌控制[J]. 广西师范大学学报(自然科学版), 2021, 39(4): 79-92.LI S T, LI Q H, ZHANG W. Co-dimension-two grazing bifurcation and chaos control of three-degree-of-freedom vibro-impact systems[J]. Journal of Guangxi Normal University (Natural Science Edition), 2021, 39(4): 79-92. (in Chinese) [10] 林何, 王三民, RÄTSCH M, 等. 齿轮-轴承系统非线性混沌控制参数摄动与轨道偏差分析[J]. 振动与冲击, 2020, 39(15): 250-256.LIN H, WANG S M, RÄTSCH M, et al. Nonlinear chaos control parametric perturbation and orbital deviation of a gear-bearing system[J]. Journal of Vibration and Shock, 2020, 39(15): 250-256. (in Chinese) [11] LEE J Y, YAN J J. Control of impact oscillator[J]. Chaos, Solitons & Fractals, 2006, 28(1): 136-142. [12] 杜伟霞, 张思进, 殷珊. 一类对称碰撞系统的间歇混沌控制方法[J]. 应用数学和力学, 2018, 39(10): 1149-1158.DU W X, ZHANG S J, YIN S. An intermittent chaos control method for a class of symmetric impact systems[J]. Applied Mathematics and Mechanics, 2018, 39(10): 1149-1158. (in Chinese) [13] SHEN Y K, YIN S, WEN G L, et al. Feedback control of grazing-induced chaos in the single-degree-of-freedom impact oscillator[J]. Journal of Computational and Nonlinear Dynamics, 2018, 13(1): 011012. doi: 10.1115/1.4037924 [14] 张惠, 卫晓娟, 丁旺才. 一类弹性碰撞振动系统周期倍化分岔预测及其神经网络控制[J]. 振动工程学报, 2019, 32(4): 626-634.ZHANG H, WEI X J, DING W C. The doubling bifurcation prediction and RBF neural network control of a soft-impact vibration system[J]. Journal of Vibration Engineering, 2019, 32(4): 626-634. (in Chinese) [15] 卫晓娟, 李宁洲, 丁旺才, 等. 碰撞振动系统混沌运动的脊波神经网络控制[J]. 华中科技大学学报(自然科学版), 2018, 46(5): 72-77.WEI X J, LI N Z, DING W C, et al. Chaotic motion control of vibro-impact system based on ridgelet neural network[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2018, 46(5): 72-77. (in Chinese) [16] 卫晓娟, 李宁洲, 张惠, 等. 一类含间隙碰撞振动系统混沌运动的RBF神经网络控制[J]. 振动工程学报, 2018, 31(2): 336-342.WEI X J, LI N Z, ZHANG H, et al. Chaos control of a vibro-impact system with clearance based on RBF neural network[J]. Journal of Vibration Engineering, 2018, 31(2): 336-342. (in Chinese) [17] 孙俊. 量子行为粒子群优化算法研究[D]. 无锡: 江南大学, 2009SUN J. Particle swarm optimization with particles having quantum behavior[D]. Wuxi: Jiangnan University, 2009. (in Chinese) [18] 金俐, 陆启韶. 非光滑动力系统Lyapunov指数谱的计算方法[J]. 力学学报, 2005, 37(1): 40-47.JIN L, LU Q S. A method for calculating the spectrum of Lyapunov exponents of non-smooth dynamical systems[J]. Acta Mechanica Sinica, 2005, 37(1): 40-47. (in Chinese) -



 点击查看大图
点击查看大图
图(8) / 表(5)
计量
- 文章访问数: 109
- HTML全文浏览量: 77
- PDF下载量: 15
- 被引次数: 0
