




An Optimal Node A* Algorithm for Path Planning of Wheeled Mobile Robot Under Optimal Energy Consumption
-
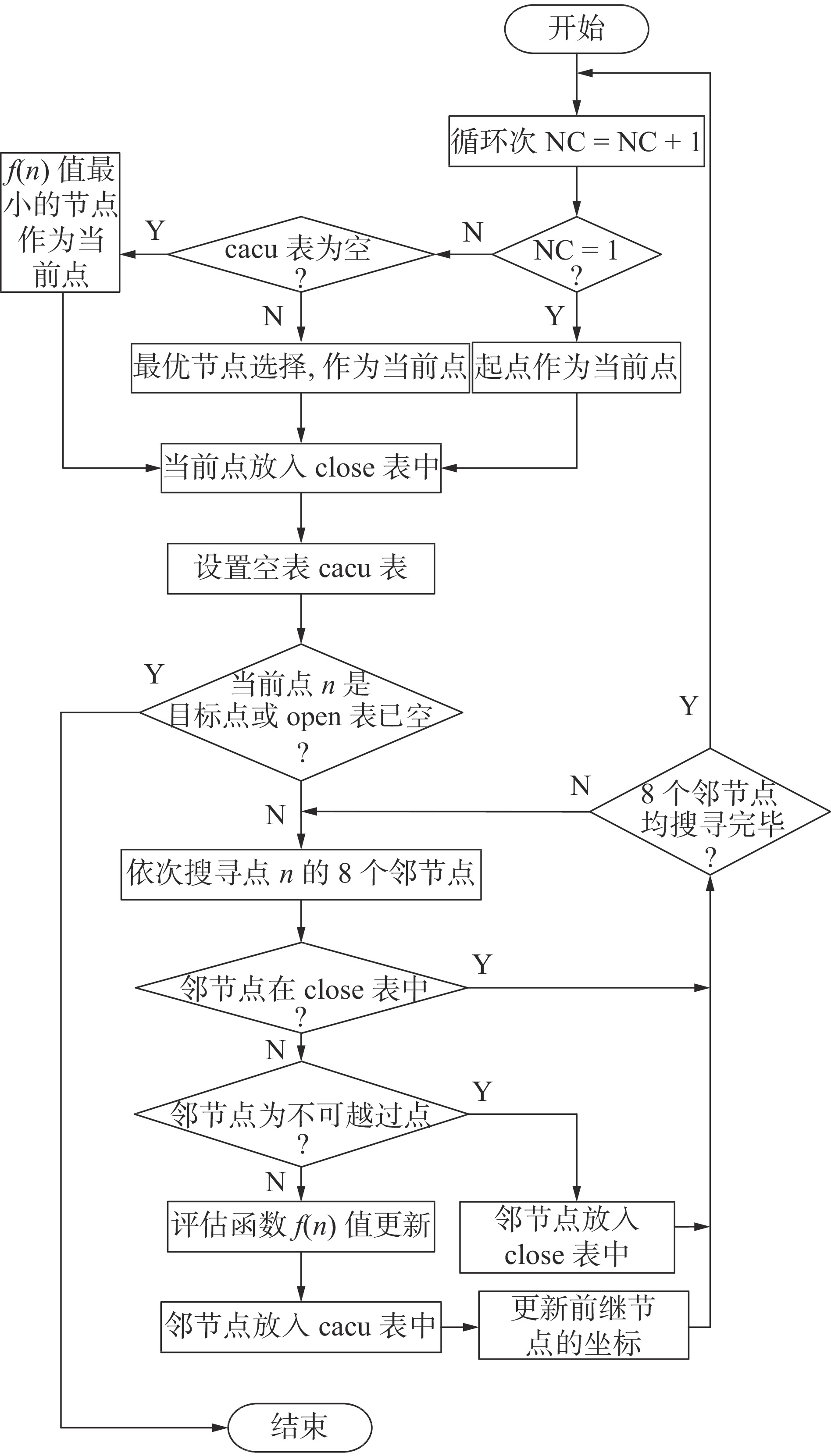
摘要: 轮式移动机器人以蓄电池作为能源,能够提供的能量有限,以更省能量作为前提进行路径规划是一个热门研究方向。根据轮式移动机器人在运行时的能耗组成,综合电机效率、地面摩擦、地形、速度变化、转弯等多因素,建立了能耗模型;基于A*算法,利用最优节点的搜索方式,提出能耗最优下轮式移动机器人作业路径规划最优节点A*算法;通过仿真实验,与最短距离约束条件、能耗最优约束条件下A*算法路径规划结果进行对比,所提算法既实现在单位距离能耗降低,又缩短规划寻路时间,验证了所提算法的有效性。Abstract: Batteries are used as the energy source of a wheeled mobile robot, which is, however, limited. Based on the composition of energy consumption of the wheeled mobile robot in operation, its energy consumption model is established by integrating the motor efficiency, ground friction, terrain, speed change, turning and other factors. The optimal node A* algorithm for the path planning of the wheeled mobile robot under optimal energy consumption is proposed with the optimal node search method. The simulation results, compared with the path planning results of the A* algorithm under the shortest distance constraint and optimal energy consumption constraint, show that the optimal node A* algorithm can not only reduce the energy consumption per unit distance but also shorten the path-finding time, thus verifying its effectiveness.
-
表 1 轮式移动机器人相关参数
相关参数 数值 轮式移动机器人左右轮距B/cm 30 轮式移动机器人前后轴距L/cm 40 轮式移动机器人质量m/kg 9 轮式机器人驱动轮轮胎半径r/cm 10.75 电动机效率η 0.78 轮式移动机器人在平地上电机的功率P/w 200  下载: 导出CSV
下载: 导出CSV
表 2 仿真实验关键参数
实验参数 数 值 滚动摩擦系数μ 0.15 横向滑动附着系数f 0.6 重力加速度g/(m·s−2) 9.8 轮式移动机器人在平地上的运行速度v0/(m·s−1) 1 轮式移动机器人在爬坡时的运行速度vs/(m·s−1) 0.5 转弯耗时t/s 0.5
下载: 导出CSV
表 3 三者的实验结果对比
算法 路径
长度/m能量
消耗/J单位距离
能耗/(J·m−1)算法寻路
时间/msONA* 266.42 31919.57 119.81 843.38 OEA* 266.82 34148.73 127.98 6443.5 ODA* 249.31 36223.42 145.29 1211.6
下载: 导出CSV
-
[1] 陈子明, 卢杰, 邓朋, 等. 基于弹尾虫运动机制的平衡轮式跳跃机器人的设计[J]. 机械工程学报, 2020, 56(17): 20-28. doi: 10.3901/JME.2020.17.020CHEN Z M, LU J, DENG P, et al. Design of balanced wheeled jumping robot based on the motion mechanism of springtail[J]. Journal of Mechanical Engineering, 2020, 56(17): 20-28. (in Chinese) doi: 10.3901/JME.2020.17.020 [2] 舒红, 封硕, 谢步庆. 轮式机器人路径规划的改进蚁群算法[J]. 制造业自动化, 2020, 42(1): 64-69.SHU H, FENG S, XIE B Q. Improved ant colony algorithm for Wheeled robot path planning[J]. Manufacturing Automation, 2020, 42(1): 64-69. (in Chinese) [3] SERRALHEIRO W, MARUYAMA N, SAGGIN F. Self-tuning time-energy optimization for the trajectory planning of a wheeled mobile robot[J]. Journal of Intelligent & Robotic Systems, 2019, 95(3-4): 987-997. [4] 宋晓茹, 任怡悦, 高嵩, 等. 移动机器人路径规划综述[J]. 计算机测量与控制, 2019, 27(4): 1-5.SONG X R, REN Y Y, GAO S, et al. Survey on technology of mobile robot path planning[J]. Computer Measurement & Control, 2019, 27(4): 1-5. (in Chinese) [5] 徐兵兵, 郝荣飞. 机器人路径规划技术的现状与发展[J]. 电子技术与软件工程, 2018(24): 81.XU B B, HAO R F. Status and development of robot path planning technology[J]. Electronic Technology & Software Engineering, 2018(24): 81. (in Chinese) [6] 任建华, 李文超, 赵凯龙, 等. 移动机器人路径规划方法研究[J]. 机电技术, 2019(4): 26-29. doi: 10.19508/j.cnki.1672-4801.2019.04.009REN J H, LI W C, ZHAO K L, et al. Research on path planning method of mobile Robot[J]. Mechanical & Electrical Technology, 2019(4): 26-29. (in Chinese) doi: 10.19508/j.cnki.1672-4801.2019.04.009 [7] 关泉珍, 鲍泓, 史志坚. 基于A*算法的驾驶地图路径规划实现[J]. 北京联合大学学报, 2016, 30(2): 31-39.GUAN Q Z, BAO H, SHI Z J. The achievement of path planning based on A* algorithm[J]. Journal of Beijing Union University, 2016, 30(2): 31-39. (in Chinese) [8] 康靖, 封硕, 谢廷船, 等. 基于蚁群算法的机器人能量管理策略[J]. 南方农机, 2019, 50(19): 32-33. doi: 10.3969/j.issn.1672-3872.2019.19.020KANG J, FENG S, XIE T C, et al. Robot energy management strategy based on ant colony algorithm[J]. China Southern Agricultural Machinery, 2019, 50(19): 32-33. (in Chinese) doi: 10.3969/j.issn.1672-3872.2019.19.020 [9] 刘贵杰, 刘鹏, 穆为磊, 等. 采用能耗最优改进蚁群算法的自治水下机器人路径优化[J]. 西安交通大学学报, 2016, 50(10): 93-98. doi: 10.7652/xjtuxb201610014LIU G J, LIU P, MU W L, et al. A path optimization algorithm for AUV using an improved ant colony algorithm with optimal energy consumption[J]. Journal of Xi′an Jiaotong University, 2016, 50(10): 93-98. (in Chinese) doi: 10.7652/xjtuxb201610014 [10] 张浩杰, 苏治宝, HERNANDEZ D E, 等. 移动机器人低能耗最优路径规划方法[J]. 农业机械学报, 2018, 49(9): 19-26. doi: 10.6041/j.issn.1000-1298.2018.09.002ZHANG H J, SU Z B, HERNANDEZ D E, et al. Energy optimal path planning for mobile robots based on improved AD* Algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(9): 19-26. (in Chinese) doi: 10.6041/j.issn.1000-1298.2018.09.002 [11] ZHANG H J, ZHANG Y D, YANG T T. A survey of energy-efficient motion planning for wheeled mobile robots[J]. Industrial Robot, 2020, 47(4): 607-621. doi: 10.1108/IR-03-2020-0063 [12] KRIMSKY E, COLLINS S H. Optimal control of an energy-recycling actuator for mobile robotics applications [C]// 2020 IEEE International Conference on Robotics and Automation (ICRA). Paris: IEEE, 2020: 3559-3565 [13] DATOUO R, MOTTO F B, ZOBO B E, et al. Optimal motion planning for minimizing energy consumption of wheeled mobile robots [C]// 2017 IEEE International Conference on Robotics and Biomimetics. Macau, China: IEEE, 2017: 2179-2184 [14] JARAMILLO-MORALES M F, DOGRU S, GOMEZ-MENDOZA J B, et al. Energy estimation for differential drive mobile robots on straight and rotational trajectories [J]. International Journal of Advanced Robotic Systems, 2020, 17(2): 172988142090965 [15] 康亚彪, 李庆杰, 高世卿, 等. 四轮野外无人车中心转向计算分析[J]. 北京汽车, 2020(6): 44-45. doi: 10.14175/j.issn.1002-4581.2020.06.012KANG Y B, LI Q J, GAO S Q, et al. Calculation of central steering of four-wheel field unmanned vehicle[J]. Beijing Automotive Engineering, 2020(6): 44-45. (in Chinese) doi: 10.14175/j.issn.1002-4581.2020.06.012 -





 点击查看大图
点击查看大图
图(9) / 表(3)
计量
- 文章访问数: 104
- HTML全文浏览量: 63
- PDF下载量: 17
- 被引次数: 0
