




Research on An Over-line and Universal Shaft Connector for Intelligent Plugging Robot with Oil and Gas Transportation Pipeline
-
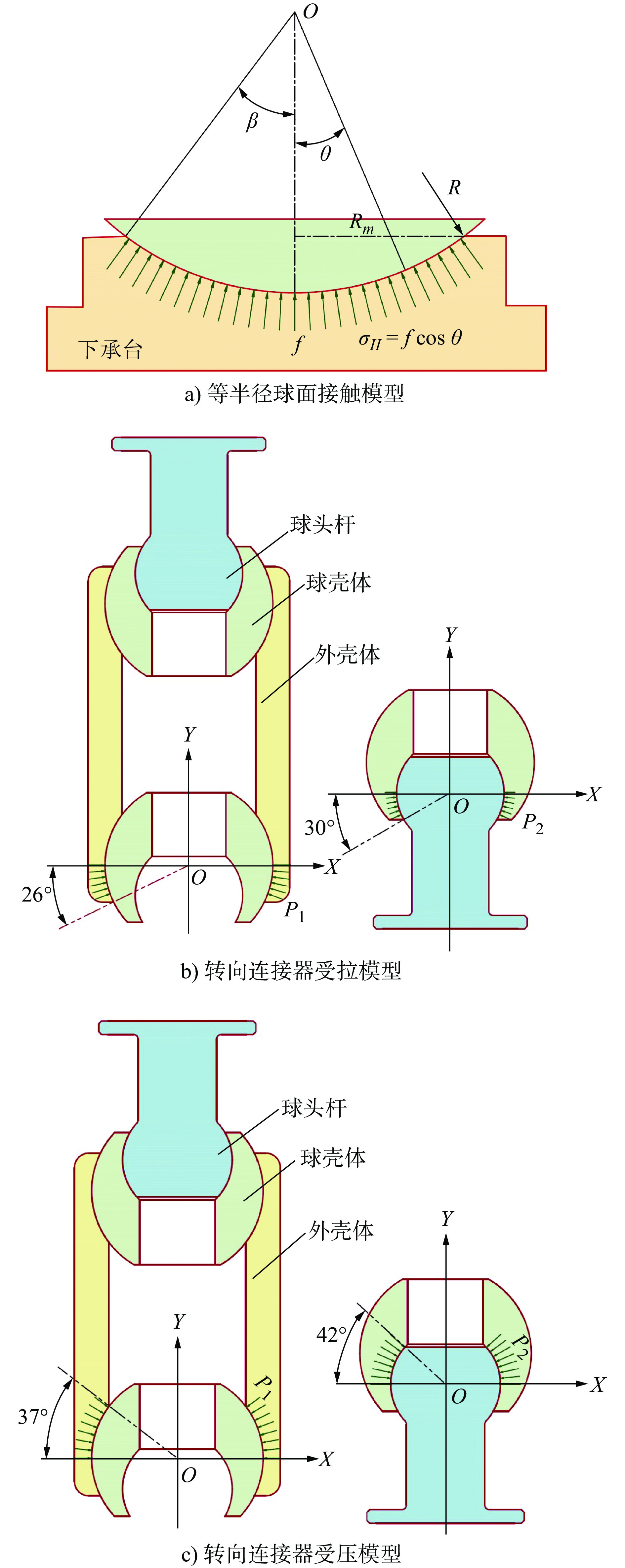
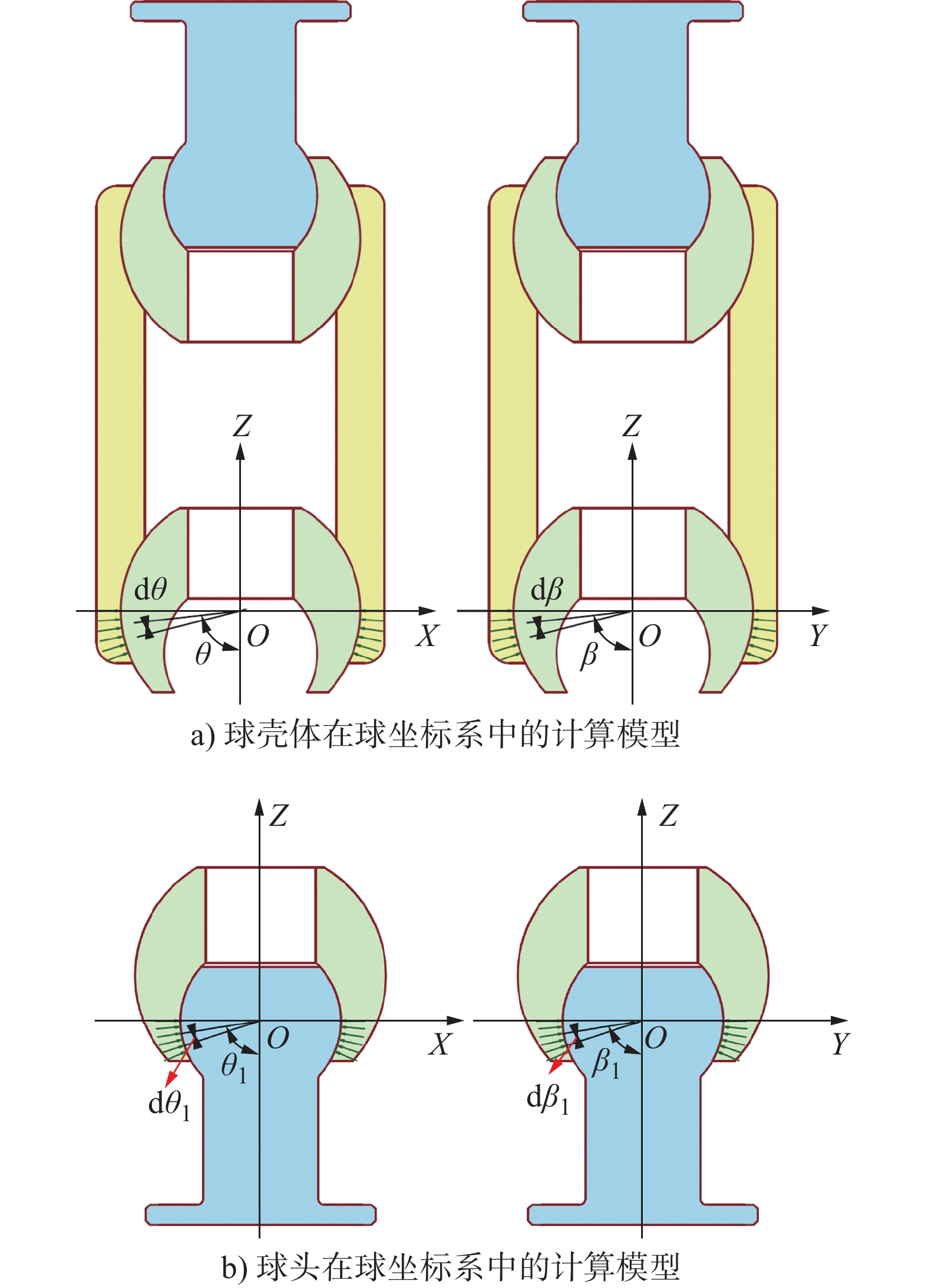
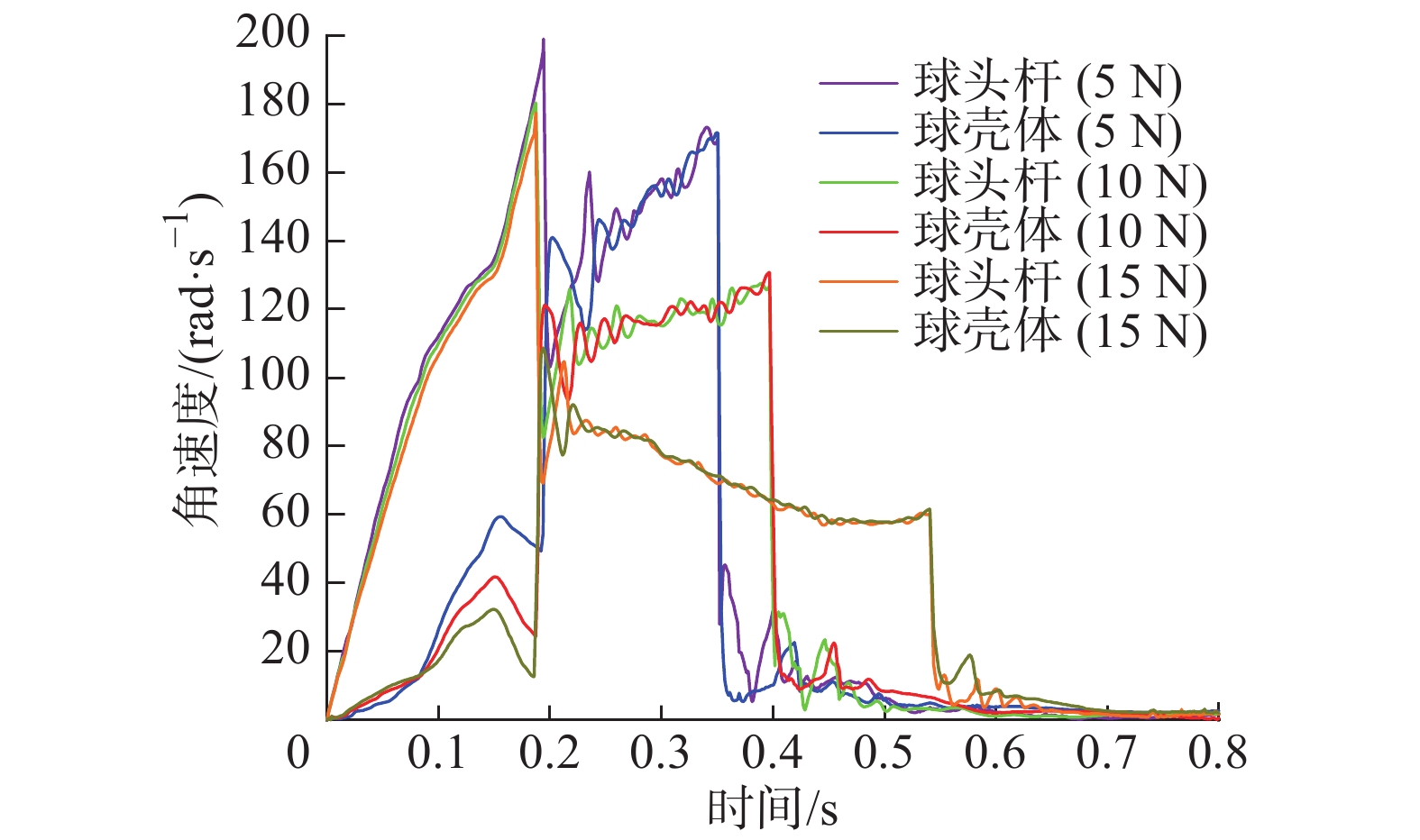
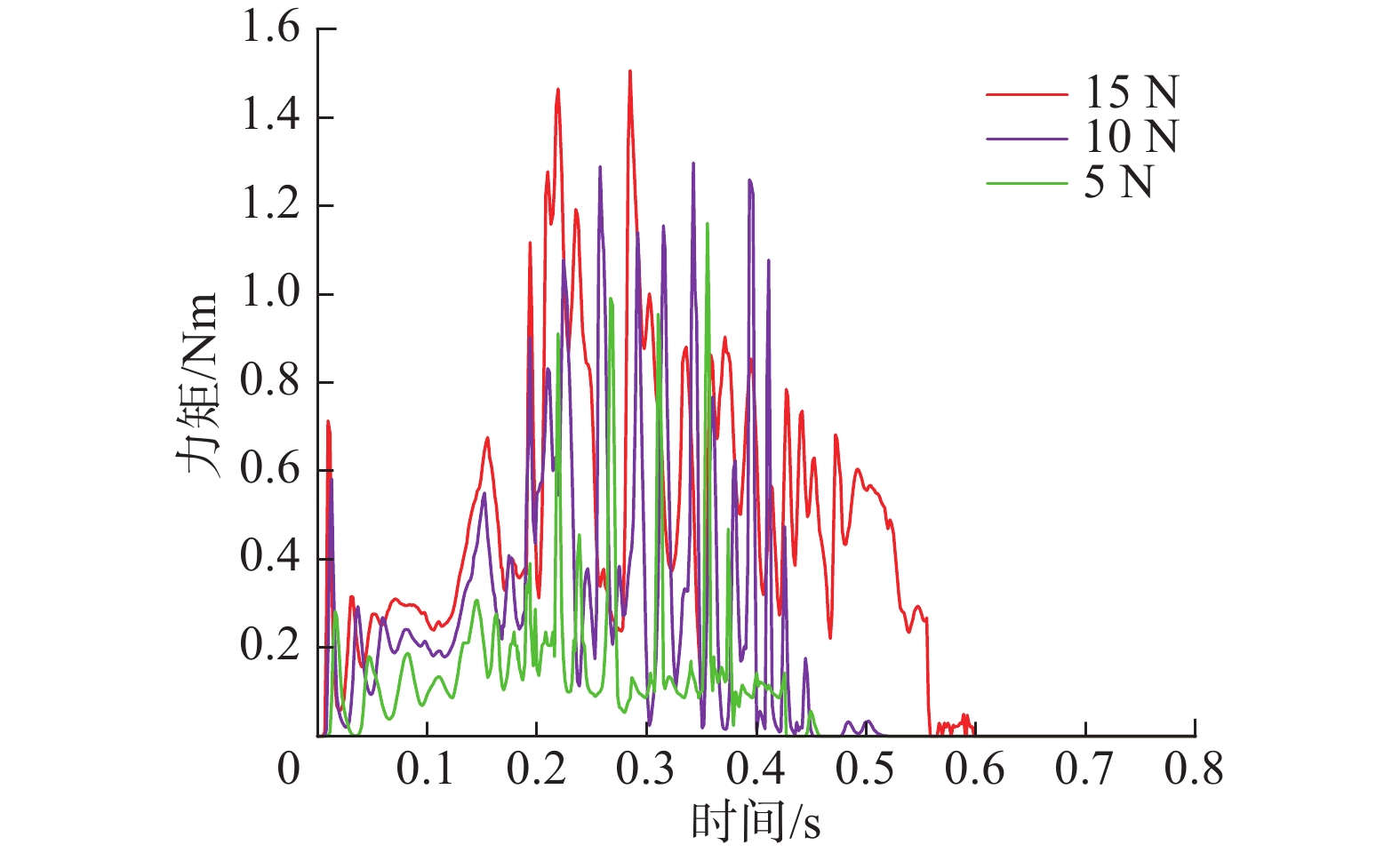
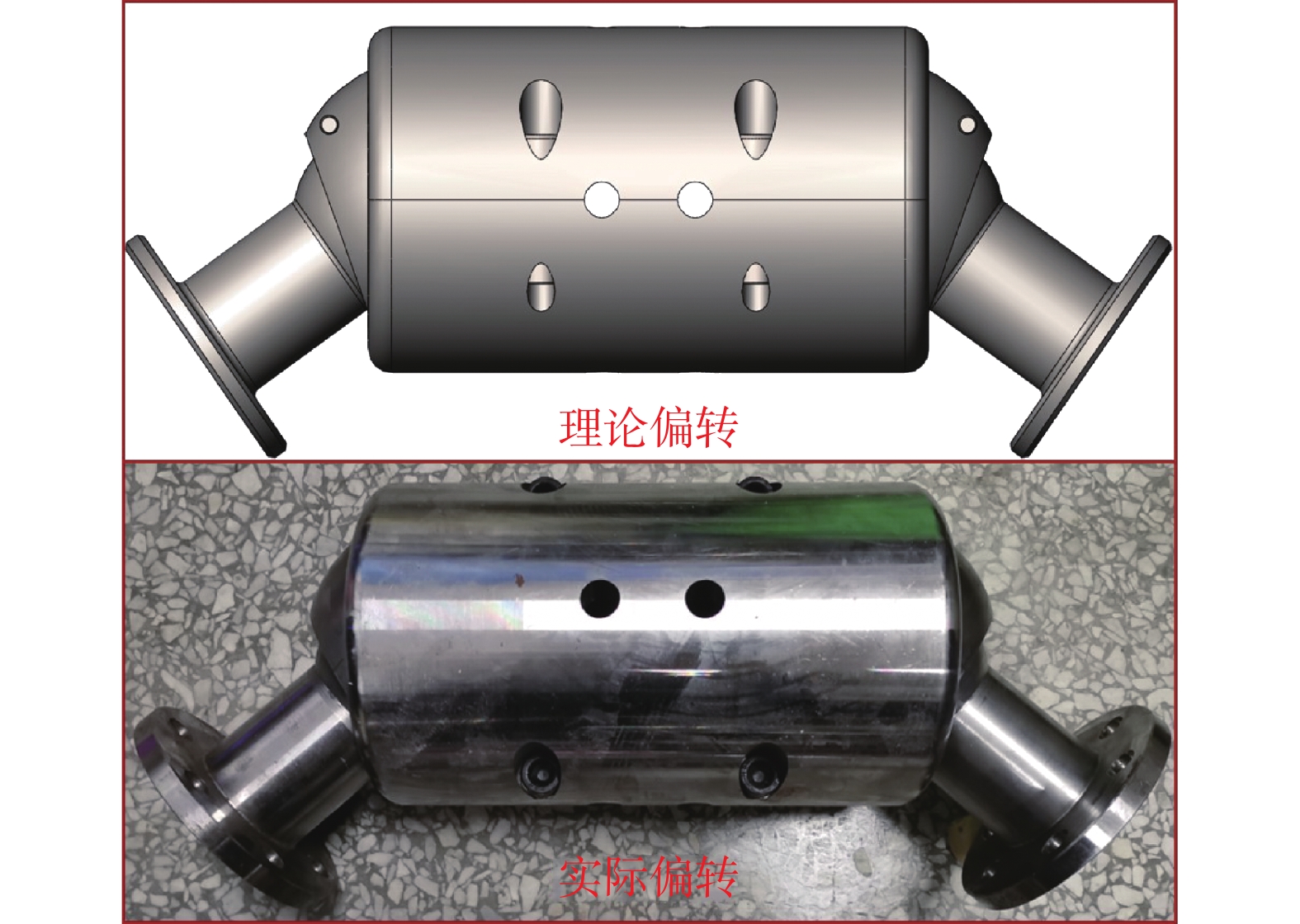
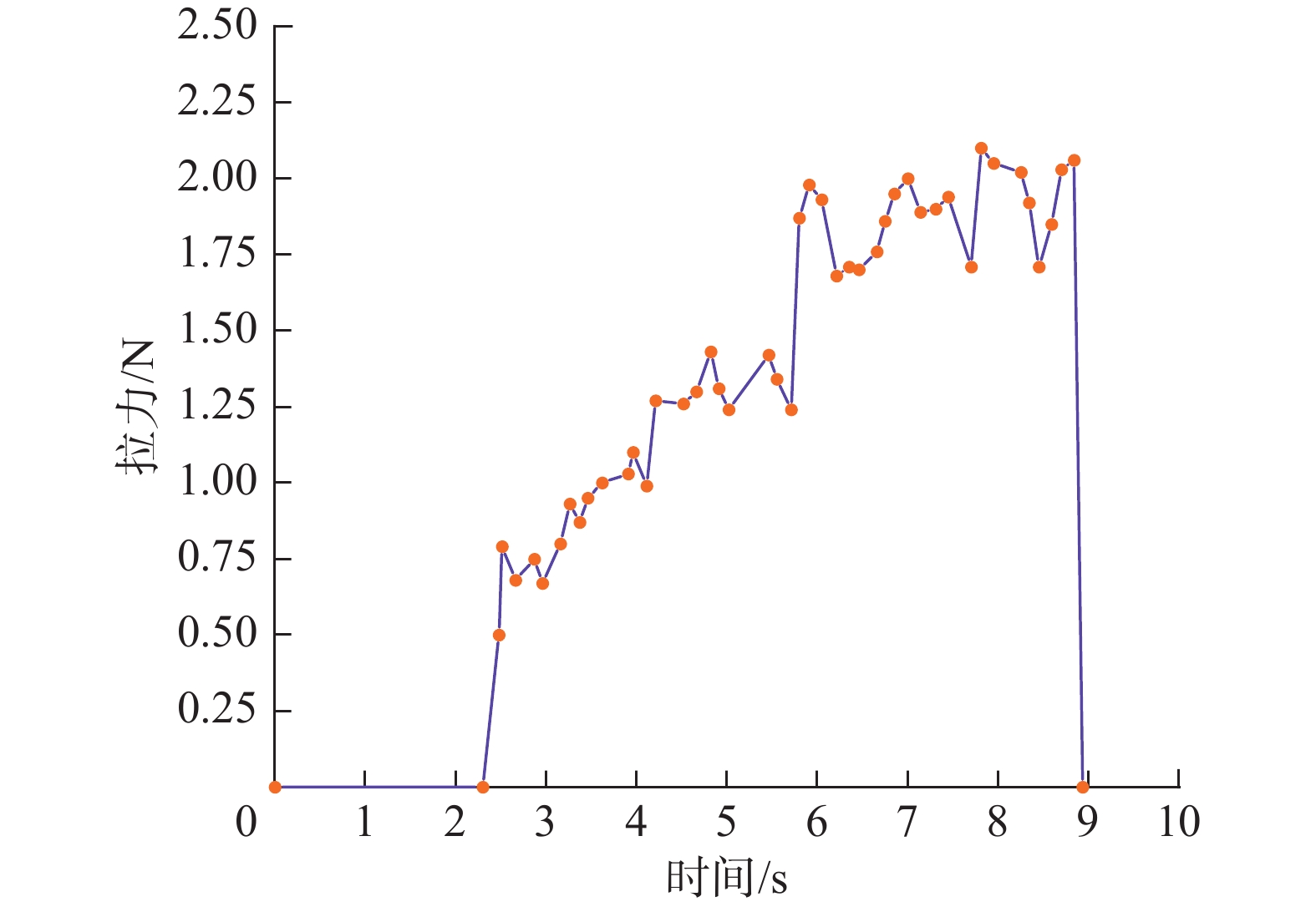
摘要: 本文所设计双重球面抱合的球铰式可过线万向连接器,用于机器人各单元间的连接与通讯。并且介绍了该连接器的创新性与特点,采用多体动力学仿真分析其轴向载荷对转动角速度及转动力矩的影响;进行转弯实验,对比理论与实际转向角度,测试转动的力矩大小。结果表明:连接器的理论和实际的转向角度相差仅为5°,转向过程中,球头杆先转动到极限位置后接触到球壳体,然后球头杆和球壳体共同转动到达极限位置;转动实验所测的转动力矩与理论计算值较为接近。Abstract: Design a double-spherical hinged ball-hinged universal connector that can be used for connection and communication among a unit of the robot. In this paper, the innovation and characteristics of the connector are introduced. Adams simulation software was used to analyze the influence of the axial load on the rotational angular velocity. The turning experiments to compare theoretical and actual steering anglesare conducted.The line passing performance test to study the influence of cable diameter and number on cable bendingis carried out. A cable damage test experiment to observe the damage of the internal cable after multiple bendsis conducted. Research indicates that the difference between the theoretical and actual steering angle of the connector is only 5°. In the steering process, ball lever firstly rotates to the limit position and then contacts ball shell, and then the ball lever and ball shell rotate together to reach the limit position; the line passing performance test results meet the requirements of pipeline robot.
-
Key words:
- pipeline robots /
- double spherical /
- universal connector /
- line passing /
- long-distance pipeline
-
[1] 祝悫智, 李秋扬, 吴超, 等. 2017年全球油气管道建设现状及发展趋势[J]. 油气储运, 2019, 38(4): 373-378.ZHU Q Z, LI Q Y, WU C, et al. Construction status and development trend of global oil & gas pipelines in 2017[J]. Oil & Gas Storage and Transportation, 2019, 38(4): 373-378. (in Chinese) [2] 李国祥, 徐道. 天然气长输管道运行管理现状和问题研究[J]. 石化技术, 2016, 23(11): 264. doi: 10.3969/j.issn.1006-0235.2016.11.194LI G X, XU D. Research on status quo and problems of operation management of natural gas long-distance pipeline[J]. Petrochemical Industry Technology, 2016, 23(11): 264. (in Chinese) doi: 10.3969/j.issn.1006-0235.2016.11.194 [3] 祝悫智, 段沛夏, 王红菊, 等. 全球油气管道建设现状及发展趋势[J]. 油气储运, 2015, 34(12): 1262-1266.ZHU Q Z, DUAN P X, WANG H J, et al. Current situations and future development of oil and gas pipelines in the world[J]. Oil & Gas Storage and Transportation, 2015, 34(12): 1262-1266. (in Chinese) [4] 隋海鸥, 葛乐通, 李先波. 刚柔耦合管道机器人管道通过性分析及验证[J]. 机械科学与技术, 2016, 35(7): 1065-1072.SUI H O, GE L T, LI X B. Analysis and validation on traveling-capability of in-pipe rigid flexible coupling robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2016, 35(7): 1065-1072. (in Chinese) [5] 田玉芹, 刘璐. 超大型浮式结构物连接器设计[J]. 船海工程, 2016, 45(1): 165-167. doi: 10.3963/j.issn.1671-7953.2016.01.035TIAN Y Q, LIU L. Design of the connector for very large floating structures[J]. Ship & Ocean Engineering, 2016, 45(1): 165-167. (in Chinese) doi: 10.3963/j.issn.1671-7953.2016.01.035 [6] 陈学良. 关节连接器技术发展概述[J]. 铁道车辆, 2019, 57(5): 18-20. doi: 10.3969/j.issn.1002-7602.2019.05.008CHEN X L. General description of development of technology in articulated couplings[J]. Rolling Stock, 2019, 57(5): 18-20. (in Chinese) doi: 10.3969/j.issn.1002-7602.2019.05.008 [7] 鲍雨梅, 周威, 潘孝勇, 等. 汽车球铰的力学性能分析[J]. 浙江工业大学学报, 2019, 47(6): 618-624.BAO Y M, ZHOU W, PAN X Y, et al. Study on the mechanical properties of automobile ball joints[J]. Journal of Zhejiang University of Technology, 2019, 47(6): 618-624. (in Chinese) [8] 李宁. 矫直机万向轴强度分析[J]. 内燃机与配件, 2020(12): 47-48. doi: 10.3969/j.issn.1674-957X.2020.12.023LI N. Strength analysis of cardan shaft of straightening machine[J]. Internal Combustion Engine & Parts, 2020(12): 47-48. (in Chinese) doi: 10.3969/j.issn.1674-957X.2020.12.023 [9] 彭立群, 林达文, 王进, 等. 铁道车辆用橡胶球铰扭转、偏转性能测试分析及探讨[J]. 铁道车辆, 2011, 49(9): 9-11. doi: 10.3969/j.issn.1002-7602.2011.09.003PENG L Q, LIN D W, WANG J, et al. Analysis and discussion on testing of torsion and deflection performances of rubber bushing for rolling stock[J]. Rolling Stock, 2011, 49(9): 9-11. (in Chinese) doi: 10.3969/j.issn.1002-7602.2011.09.003 [10] 郝良秋, 杨博婷. RPC球铰的应用[J]. 筑路机械与施工机械化, 2018, 35(5): 102-107. doi: 10.3969/j.issn.1000-033X.2018.05.018HAO L Q, YANG B T. Application of RPC ball joints[J]. Road Machinery & Construction Mechanization, 2018, 35(5): 102-107. (in Chinese) doi: 10.3969/j.issn.1000-033X.2018.05.018 [11] KONNARIS C, GAVRIEL C, THOMIK A A C, et al. EthoHand: a dexterous robotic hand with ball-joint thumb enables complex in-hand object manipulation[C]//Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics. Singapore: IEEE, 2016: 1154-1159 [12] 刘响响, 罗家维, 赵婧. 一种管道疏通蛇形机器人的关节研究[J]. 机电信息, 2020(27): 135. doi: 10.19514/j.cnki.cn32-1628/tm.2020.27.070LIU X X, LUO J W, ZHAO J. Research on the joints of a snake-shaped pipe dredging robot[J]. Mechanical and Electrical Information, 2020(27): 135. (in Chinese) doi: 10.19514/j.cnki.cn32-1628/tm.2020.27.070 [13] 李海源, 刘畅, 严鲁涛, 等. 上肢外骨骼机器人的阻抗控制与关节试验研究[J]. 机械工程学报, 2020, 56(19): 200-209. doi: 10.3901/JME.2020.19.200LI H Y, LIU C, YAN L T, et al. Research on impendence control of an upper limb exoskeleton robot and joint experiments[J]. Journal of Mechanical Engineering, 2020, 56(19): 200-209. (in Chinese) doi: 10.3901/JME.2020.19.200 [14] 颜惠华, 王长海, 罗力军. 桥梁转体施工中球铰静摩擦系数计算方法[J]. 世界桥梁, 2015, 43(4): 74-78.YAN H H, WANG C H, LUO L J. Calculation methods for static friction coefficient of spherical hinges during bridge rotating construction[J]. World Bridges, 2015, 43(4): 74-78. (in Chinese) [15] 范剑锋, 刘涛, 彭自强, 等. 基于非赫兹接触理论下转体桥球铰磨心应力分布分析[J]. 武汉理工大学学报, 2018, 40(1): 48-52.FAN J F, LIU T, PENG Z Q, et al. Stress distribution analysis of sphere hinges of swing bridge based on non-hertz contact theory[J]. Journal of Wuhan University of Technology, 2018, 40(1): 48-52. (in Chinese) [16] 张玺, 杨晋, 高俊峰. 锻造液压机工作缸连接球铰的结构研究[J]. 锻压技术, 2018, 43(2): 116-121.ZHANG X, YANG J, GAO J F. Study on structure for connecting spherical hinge of forging hydraulic cylinder[J]. Forging & Stamping Technology, 2018, 43(2): 116-121. (in Chinese) [17] 宋海生, 王磊, 田学武, 等. 基于振动控制的后视镜球铰摩擦能耗机理研究[J]. 中国机械工程, 2021, 32(6): 674-680. doi: 10.3969/j.issn.1004-132X.2021.06.006SONG H S, WANG L, TIAN X W, et al. Research on friction energy dissipation mechanism of rear-view mirror spherical joints based on vibration control[J]. China Mechanical Engineering, 2021, 32(6): 674-680. (in Chinese) doi: 10.3969/j.issn.1004-132X.2021.06.006 [18] 张亮亮, 李宽, 杨帅. 一种用于细长杆顶端的球铰支座摩擦系数的研究[J]. 航空精密制造技术, 2020, 56(3): 26-29. doi: 10.3969/j.issn.1003-5451.2020.03.007ZHANG L L, LI K, YANG S, et al. Research of friction coefficient of spherical hinge used on top of a slender rod[J]. Aviation Precision Manufacturing Technology, 2020, 56(3): 26-29. (in Chinese) doi: 10.3969/j.issn.1003-5451.2020.03.007 [19] FENG H Y, YIN Z H, SHANGGUAN W B, et al. Analysis and optimization for contact forces and transmission efficiency of an automotive ball joint[J]. Proceedings of the Institution of Mechanical Engineers, Part D:Journal of Automobile Engineering, 2020, 234(14): 3207-3223. doi: 10.1177/0954407020952583 [20] 张琪峰. 平转施工桥梁中球铰的设计与计算[J]. 城市道桥与防洪, 2017(11): 84-87.ZHANG Q F. Design and calculation of spherical hinge in horizontal rotating construction of bridges[J]. Urban Roads Bridges & Flood Control, 2017(11): 84-87. (in Chinese) [21] KIM S U, JEONG G I, LEE K H, et al. Prediction of structural performance of an automotive ball joint[J]. Journal of the Korea Academia-Industrial Cooperation Society, 2018, 19(1): 705-713. -

 下载:
下载:



 点击查看大图
点击查看大图

图(10) / 表(1)
计量
- 文章访问数: 103
- HTML全文浏览量: 63
- PDF下载量: 15
- 被引次数: 0
