




Design and Research of A Variable-diameter Wheel-legged Obstacle Overcoming Robot
-
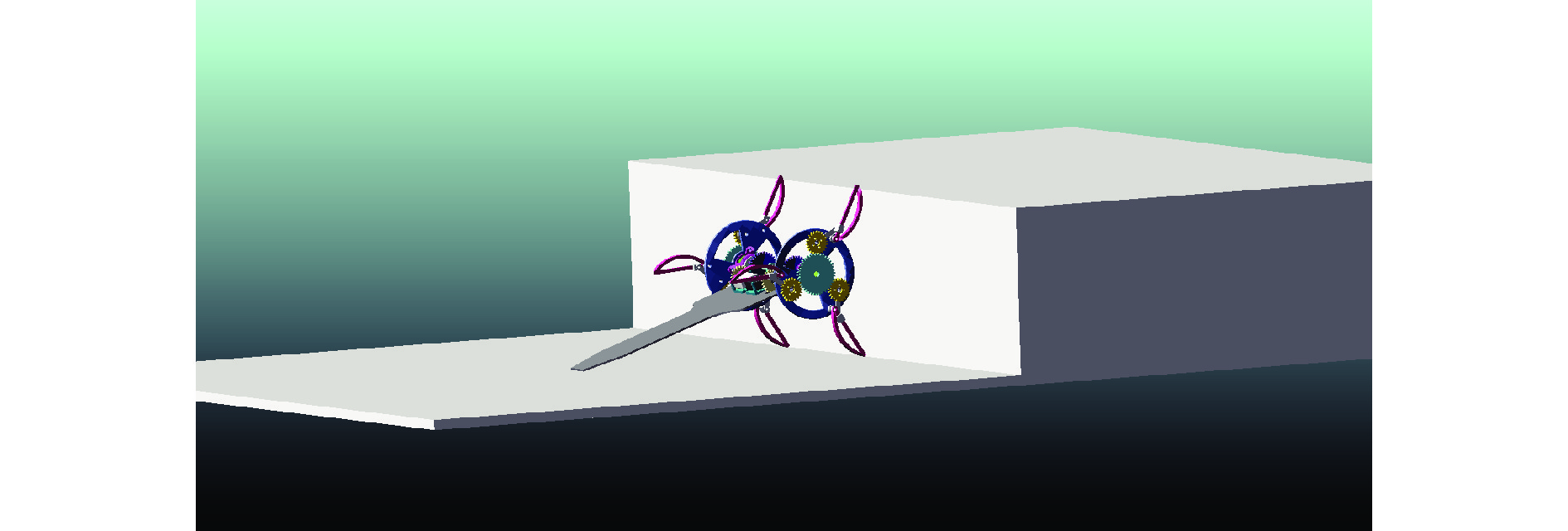
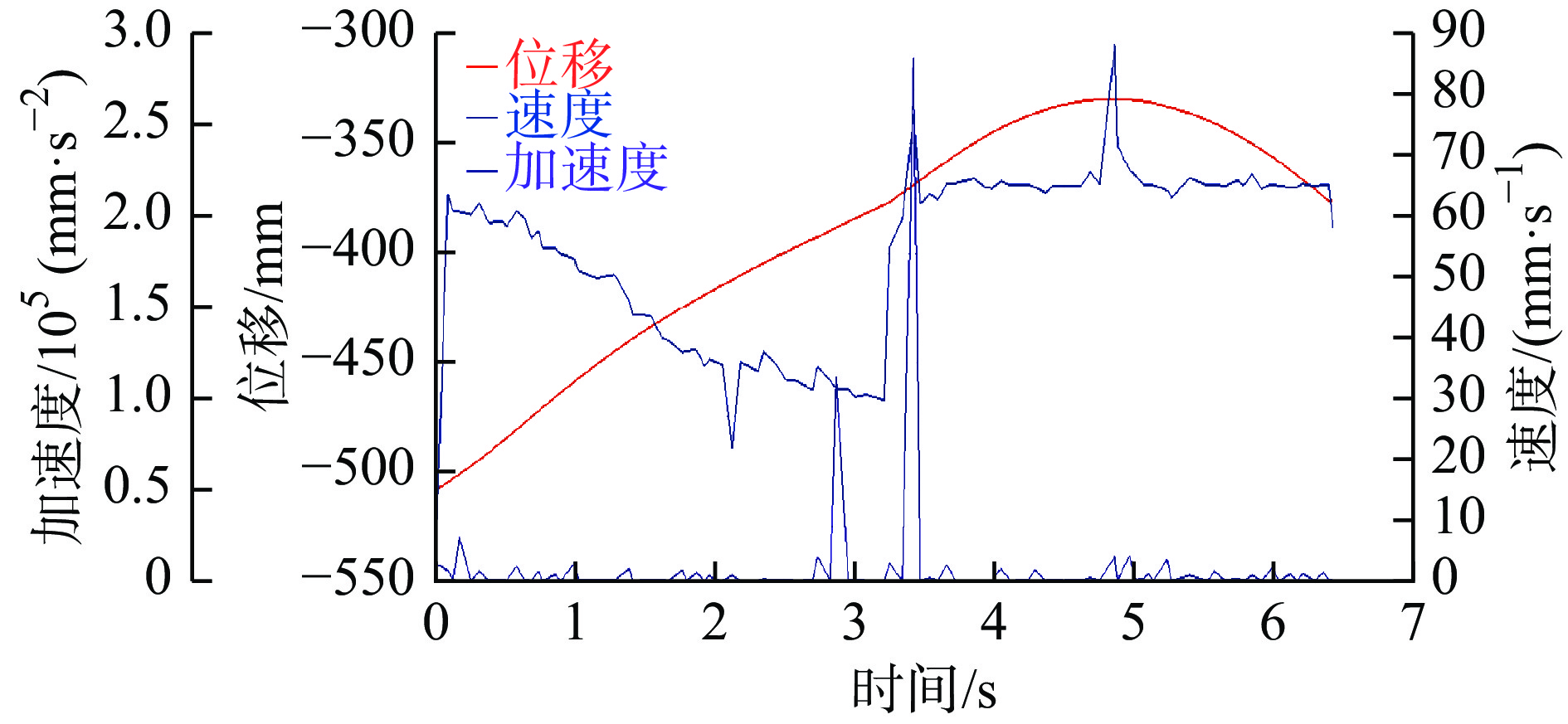
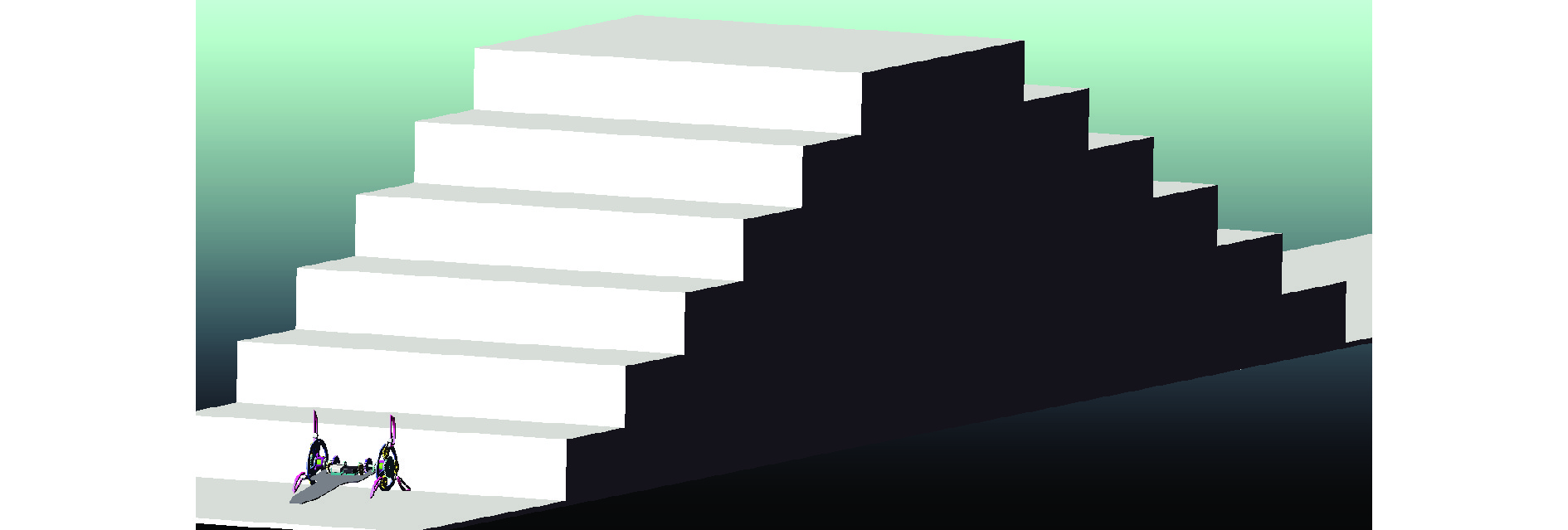
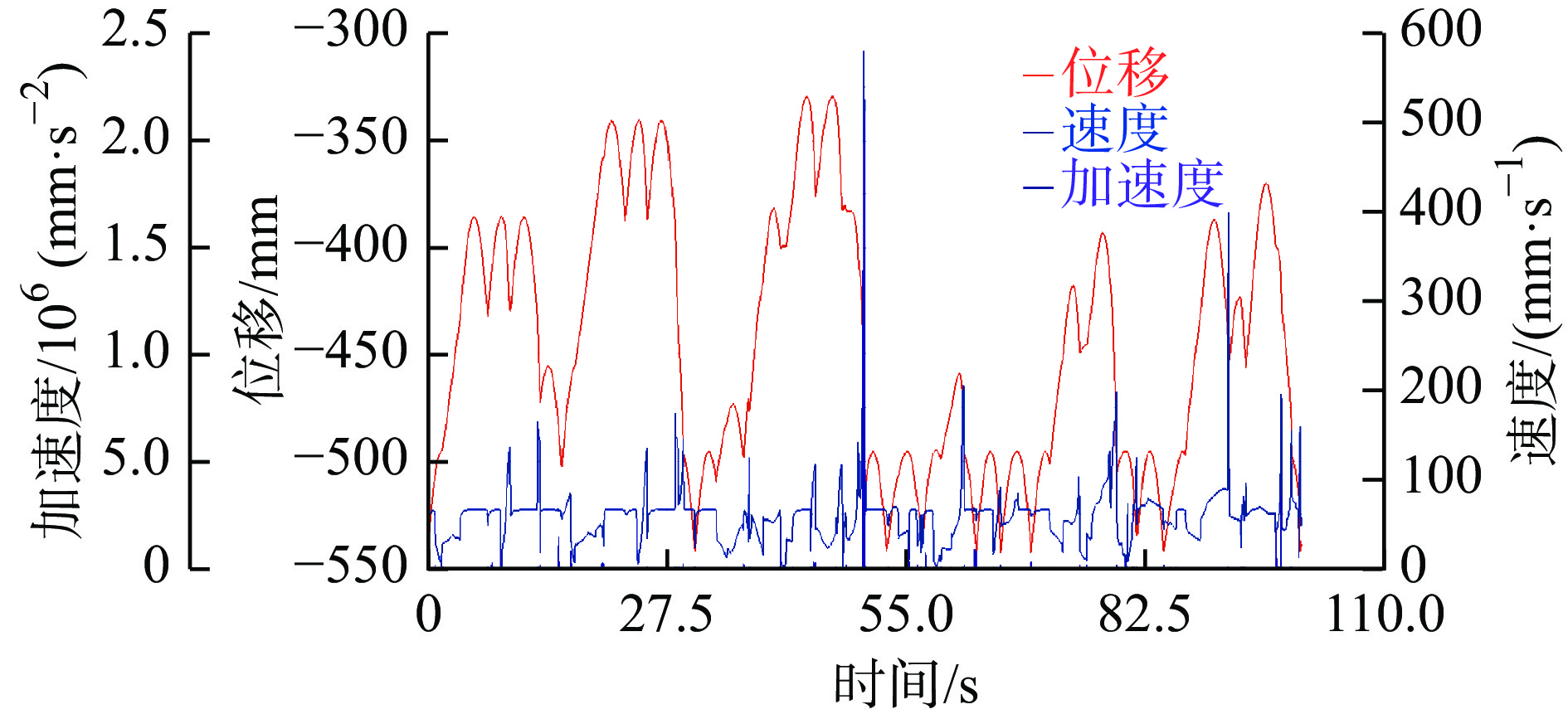
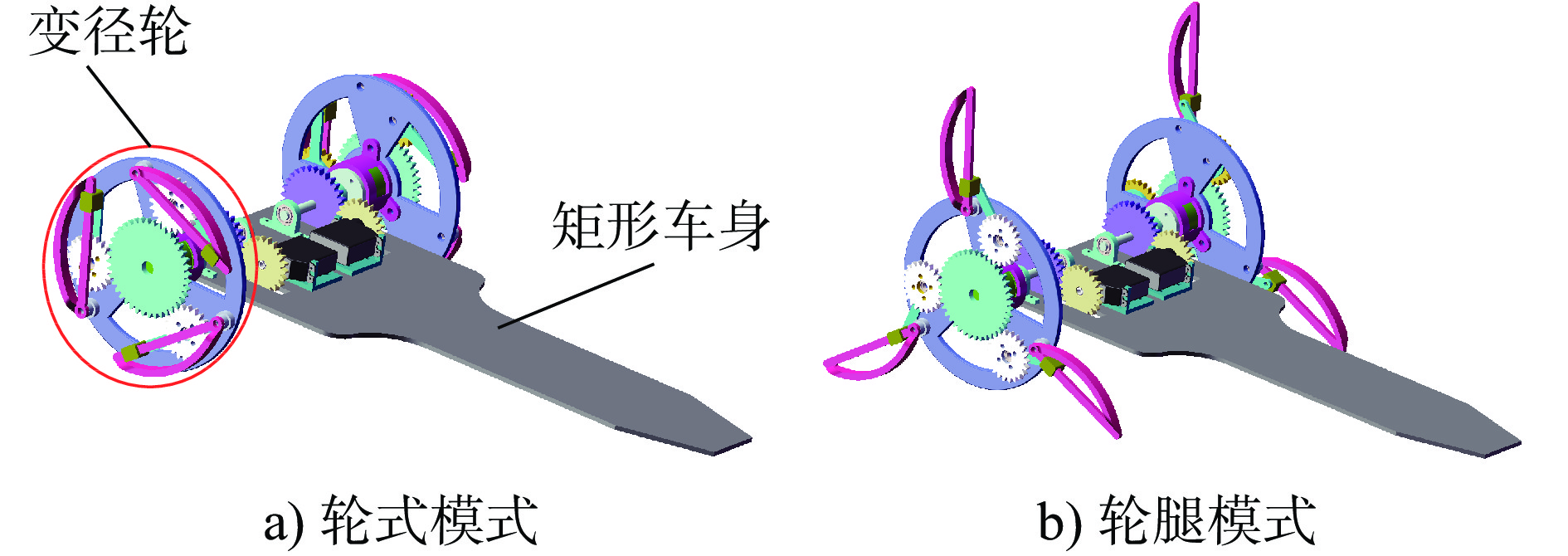
摘要: 针对地面移动机器人在非结构化地形中越障存在的局限性,提出一种基于平面齿轮连杆杆组的可变径轮腿式越障机器人的设计方案。首先对越障机器人的变径机构在轮式和轮腿式两种模式之间的变换原理进行了介绍。当遇到障碍物时,变径机构可依据障碍物的高度来变换模式从而进行越障运动。在此基础上通过计算其变形比以及运动学分析仿真,验证了该变径机构设计的合理性、较强的越障能力和模式变换时的可靠性和稳定性。其次通过构建力学模型来分析两种模式下机器人的越障能力,得出其在不同模式下的极限越障高度。最后,基于ADAMS软件对机器人在单台阶、连续台阶以及复杂路面时的越障能力进行运动仿真。结果表明该越障机器人在面对不同工况时都具有较好的越障能力,验证了设计方案的可行性。Abstract: Aiming at the limitations of ground-based mobile robots in unstructured terrain, a design scheme of variable-diameter wheel-legged obstacle-climbing robots based on plane gear connecting rod group is proposed in this paper. Firstly, the transformation principle of the obstacle-climbing robot between wheel mode and wheel-leg mode through variable-diameter mechanism was introduced. When encountering obstacles, the variable-diameter mechanism can change the mode according to the height of the obstacles to perform obstacle crossing movement. On this basis, through deformation ratio calculationand kinematics simulation, the rationality of the design of the variable-diameter mechanism, its strong obstacle-climbing ability, and the reliability and stability of the mode change are verified. Secondly, by constructing a mechanical model to analyze the obstacle-climbing ability of the robot in the two modes, and the maximum obstacle-climbing height in different modes are obtained. Finally, based on ADAMS software, the robot's ability to obstacle-climbing on single steps, continuous steps and complex roads is simulated. The results show that the obstacle-climbing robot has better obstacle-climbing ability when facing different working conditions, which verifies the feasibility of the design scheme.
-
Key words:
- variable-diameter mechanisms /
- wheel-legged /
- obstacle-climbing robots /
- ADAMS
-
[1] REN H Y, LI Q M, LIU B, et al. Design and optimization of an elastic linkage quadruped robot based on workspace and tracking error[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2018, 232(22): 4152-4166. doi: 10.1177/0954406217750186 [2] YAO J J, HUANG Y X, JIANG G L, et al. Design and its characteristic analysis of a wheeled train uncoupling robot with multi-degrees-of-freedom[J]. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2016, 230(10): 1673-1684. doi: 10.1177/0954406215582017 [3] HAN I. Development of a stair-climbing robot using springs and planetary wheels[J]. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2008, 222(7): 1289-1296. doi: 10.1243/09544062JMES1007 [4] ZHOU F L, XU X J, XU H J, et al. Transition mechanism design of a hybrid wheel-track-leg based on foldable rims[J]. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2019, 233(13): 4788-4801. doi: 10.1177/0954406219831029 [5] DING W, RUAN Q, YAO Y A. Design and locomotion analysis of a novel deformable mobile robot with two spatial reconfigurable platforms and three kinematic chains[J]. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2017, 231(8): 1481-1499. doi: 10.1177/0954406216641453 [6] PORSHOKOUHI P N, MASOULEH M T, KAZEMI H. Collision-free path planning of a novel reconfigurable mobile parallel mechanism[J]. Proceedings of the Institution of Mechanical Engineers, 2017, 231(20): 3728-3742. [7] 张程煜, 郭盛, 赵福群. 新型轮腿复合机器人的运动分析及步态研究[J]. 机械工程学报, 2019, 55(15): 145-153. doi: 10.3901/JME.2019.15.145ZHANG C Y, GUO S, ZHAO F Q. Motion analysis and gait research of a new wheel-legged compound robot[J]. Journal of Mechanical Engineering, 2019, 55(15): 145-153. (in Chinese) doi: 10.3901/JME.2019.15.145 [8] 马泽润, 郭为忠, 高峰. 一种新型轮腿式移动机器人的越障能力分析[J]. 机械设计与研究, 2015, 31(4): 6-10. doi: 10.13952/j.cnki.jofmdr.2015.0129MA Z R, GUO W Z, GAO F. Analysis on obstacle negotiation of a new wheel-legged robot[J]. Machine Design & Research, 2015, 31(4): 6-10. (in Chinese) doi: 10.13952/j.cnki.jofmdr.2015.0129 [9] JEHANNO J M, CULLY A, GRAND C, et al. Design of a wheel-legged hexapod robot for creative adaptation[M]//KOZŁOWSKI K, TOKHI M O, VIRK G S. Mobile Service Robotics. Hackensack: World Scientific Publishing Co. , 2014 [10] NING M, MA Z F, CHEN H L, et al. Design and analysis for a multifunctional rescue robot with four-bar wheel-legged structure[J]. Advances in Mechanical Engineering, 2018, 10(2): 168781401774739. (in Chinese) doi: 10.1177/1687814017747399 [11] QIAO G F, SONG G M, ZHANG Y, et al. A wheel-legged robot with active waist joint: design, analysis, and experimental results[J]. Journal of Intelligent & Robotic Systems, 2016, 83(3): 485-502. [12] KIM Y, KIM J, KIM H S, et al. Curved-spoke tri-wheel mechanism for fast stair-climbing[J]. IEEE Access, 2019, 7: 173766-173773. doi: 10.1109/ACCESS.2019.2956163 [13] RYU S, LEE Y, SEO T. Shape-morphing wheel design and analysis for step climbing in high speed locomotion[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 1977-1982. doi: 10.1109/LRA.2020.2970977 [14] 张明路, 李敏, 田颖, 等. 轮-履复合被动自适应机器人设计与参数分析[J]. 机械科学与技术, 2019, 38(2): 198-204. doi: 10.13433/j.cnki.1003-8728.20180148ZHANG M L, LI M, TIAN Y, et al. Design and parameter analysis on passive adaptive robot of wheel-track compound[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(2): 198-204. (in Chinese) doi: 10.13433/j.cnki.1003-8728.20180148 [15] TORISAKA A, EGUCHI K, MIURA S, et al. Leg-circle transformable wheel for improved runnability of a lunar rover[J]. Journal of Intelligent Material Systems and Structures, 2021, 32(9): 1013-1023. doi: 10.1177/1045389X20952545 [16] SUN T, XIANG X, SU W H, et al. A transformable wheel-legged mobile robot: design, analysis and experiment[J]. Robotics and Autonomous Systems, 2017, 98: 30-41. doi: 10.1016/j.robot.2017.09.008 [17] NING M, XUE B L, MA Z F, et al. Design, analysis, and experiment for rescue robot with wheel-legged structure[J]. Mathematical Problems in Engineering, 2017, 2017: 5719381. [18] 魏军英, 杨世强, 王吉岱, 等. 八轮式爬楼越障机器人设计与仿真分析[J]. 机械科学与技术, 2019, 38(10): 1519-1525. doi: 10.13433/j.cnki.1003-8728.20190014WEI J Y, YANG S Q, WANG J D, et al. Design and simulation analysis of an eight-wheeled climbing obstacle robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(10): 1519-1525. (in Chinese) doi: 10.13433/j.cnki.1003-8728.20190014 [19] 张娜, 沈灵斌, 李晔卓, 等. 自适应可变形轮腿式移动机构[J]. 机械科学与技术, 2020, 39(11): 1705-1712. doi: 10.13433/j.cnki.1003-8728.20190320ZHANG N, SHEN L B, LI Y Z, et al. Self-adaptive deformable wheel-legged mobile mechanism[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(11): 1705-1712. (in Chinese) doi: 10.13433/j.cnki.1003-8728.20190320 -

 下载:
下载:




 点击查看大图
点击查看大图
图(13) / 表(1)
计量
- 文章访问数: 108
- HTML全文浏览量: 359
- PDF下载量: 46
- 被引次数: 0
