




A Hierarchical Coordinated Control Method for Tracking Path of Distributed Electric Vehicle
-
摘要: 针对分布式电驱车路径跟踪问题,基于分层协调控制方法,提出了一种路径跟踪策略。由电驱车独立转向/驱动的结构优势,设计四轮阿克曼转向理论,以建立电驱车路径跟踪分层运动学模型,并应用到路径跟踪控制策略中。该策略分为上下两层控制。在上层控制中,将上层运动学模型作为模型预测控制算法的预测模型,通过设定最优目标函数和约束条件将未来控制增量的求解问题转换为二次规划的最优解问题,计算出最优转角和速度控制量。下层控制中,通过下层运动学,将上层控制得到的控制量映射到四轮的转角和速度控制量,应用模糊PID算法,实现电驱车的路径跟踪控制。在基于Carsim/Simulink的仿真平台上进行圆形路径跟踪仿真验证,结果表明,该控制器能够使分布式电驱车实现路径的准确跟踪;在实车试验中进行换道路径跟踪,简单MPC(模型预测控制算法)与分层协调控制数据结果对比表明分层协调控制方法能够有效的改善控制性能,提供路径跟踪的精确性和稳定性。Abstract: Because the path of a distributed electric vehicle is difficult to track, a path tracking strategy was proposed based on the layered coordinated control method. Based on the structural advantage of the electric vehicle′s independent steering/driving, the four-wheel Ackerman steering theory is designed to establish the layered kinematics model of the electric vehicle′s path following and to apply it to the path following control strategy. The strategy is divided into two layers of control. In the upper layer control, the upper-layer kinematics model is used as the prediction model of the model predictive control algorithm. By setting the optimal objective function and constraint conditions, the solution of the future control increment problem is transformed into the optimal quadratic programming solution problem. The optimal rotation angle and velocity control quantity are calculated. In the lower layer control, through the lower layer kinematics, the control quantity obtained with the upper layer control is mapped to the angle and speed control quantity of the four wheels of the electric vehicle. The fuzzy PID algorithm is used to realize the path tracking control of the electric vehicle. The circular path tracking is simulated with the CarSim/Simulink simulation platform. The simulation results show that the controller can accurately track the path of the distributed electric vehicles. The comparison between the simple MPC data and the layered coordinated control data shows that the layered coordinated control method can effectively improve the control performance, accuracy and stability of the path tracking.
-
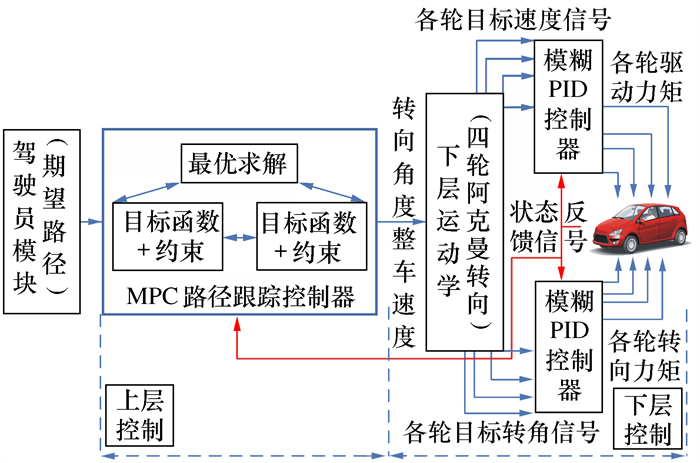
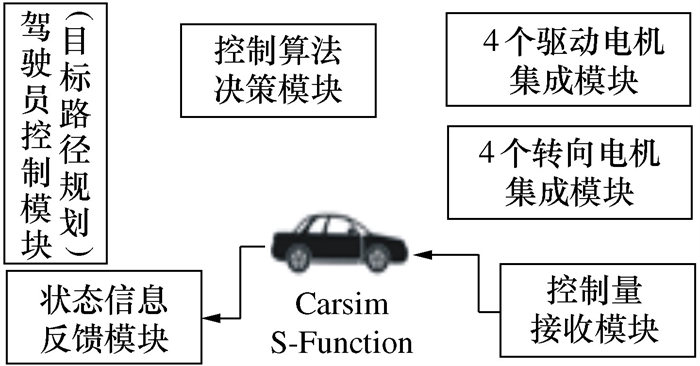
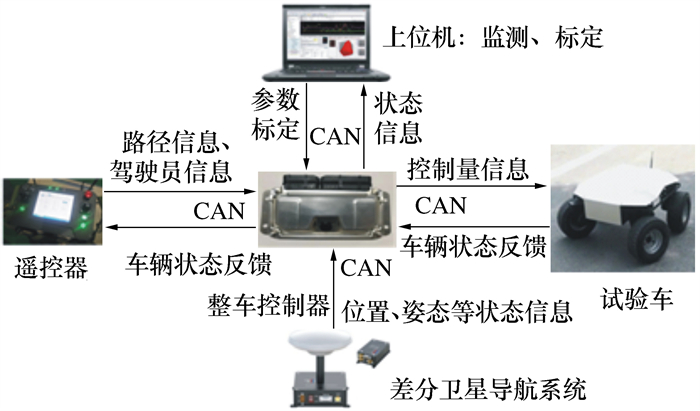
图 1 分层协调控制理论下的分布式人车路径跟踪控制框架
Figure 1. Distributed manned vehicle path tracking control framework under layered coordinated control theory
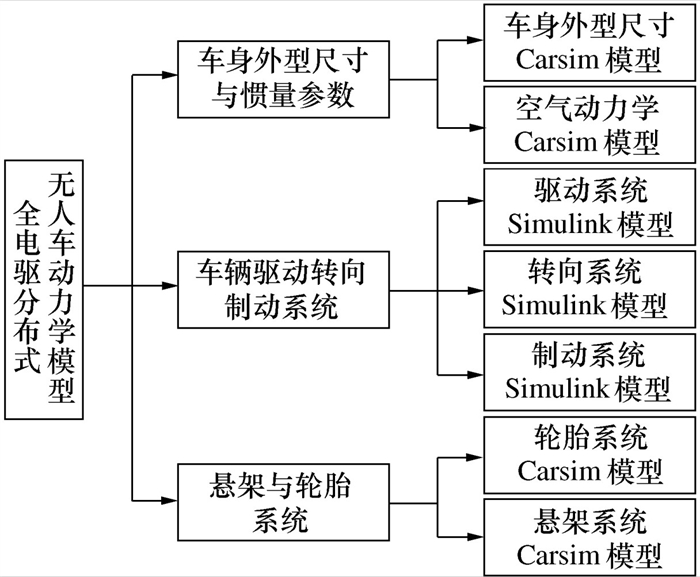
图 2 全电驱分布式电驱车动力学模型
Figure 2. Dynamic model of a fully electric-driven distributed electric vehicle
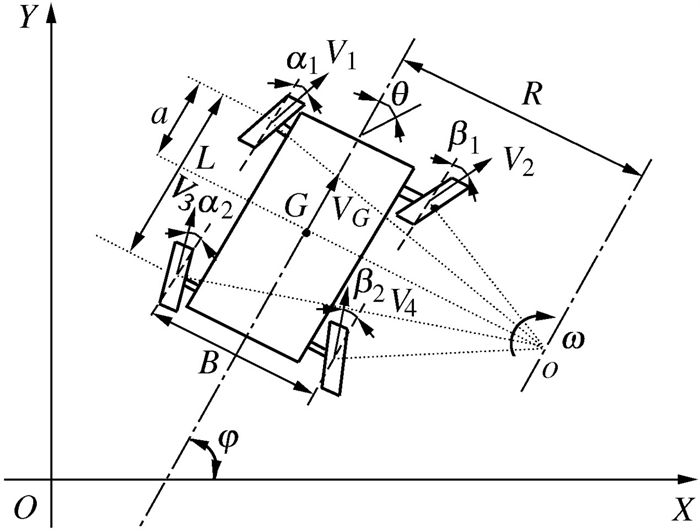
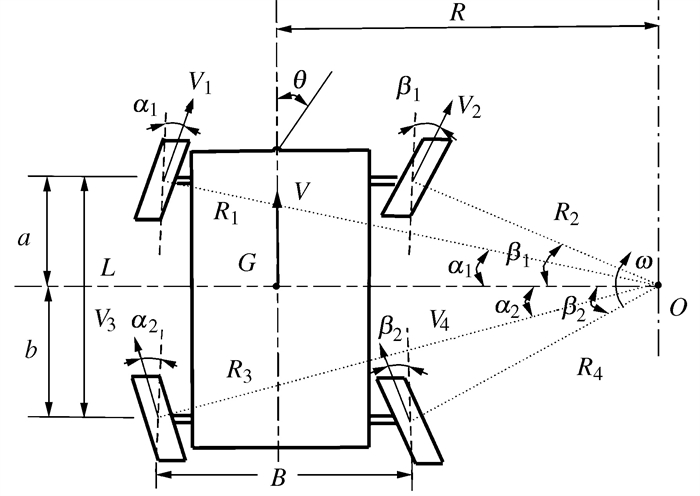
图 5 分布式电驱车路径跟踪运动学模型
Figure 5. Kinematic model for path tracking of distributed electric vehicles
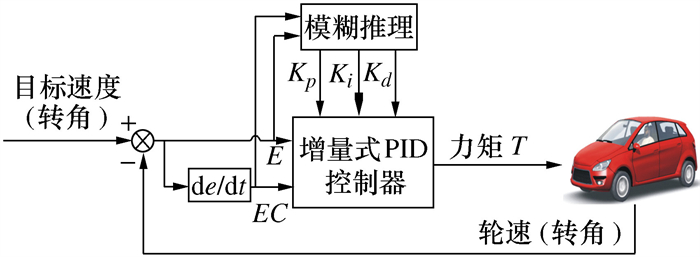
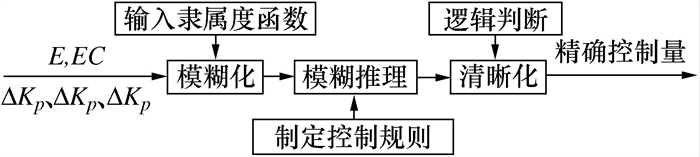
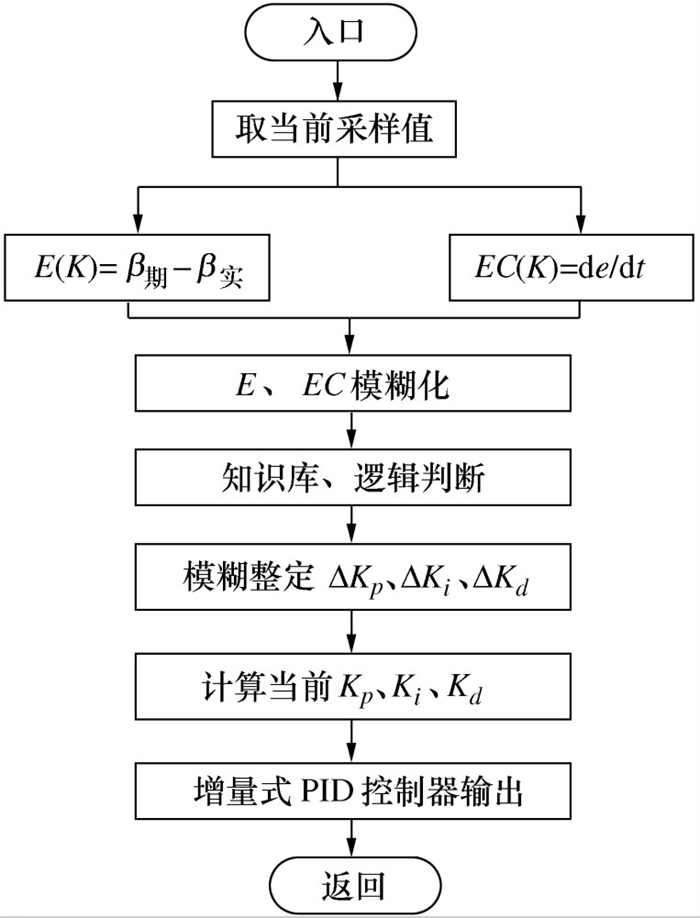
图 8 基于自适应模糊PID控制的附加横摆力矩控制器
Figure 8. Additional yaw moment controller based on adaptive fuzzy PID control
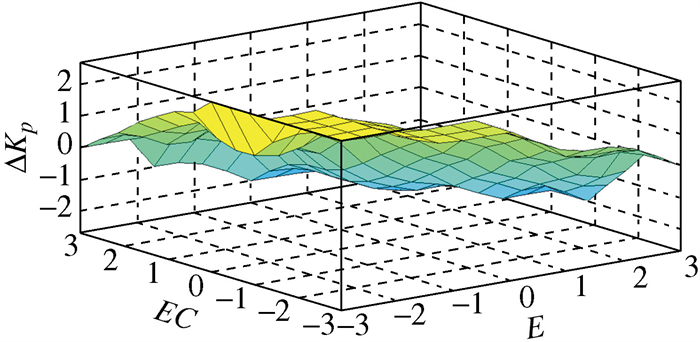
图 10 自适应模糊PID控制中ΔKp输出曲面
Figure 10. The ΔKp output surface of adaptive fuzzy PID control

图 11 自适应模糊PID控制中ΔKi输出曲面
Figure 11. The ΔKi output surface of adaptive fuzzy PID control

图 12 自适应模糊PID控制中ΔKd输出曲面
Figure 12. The ΔKd output surface of adaptive fuzzy PID control
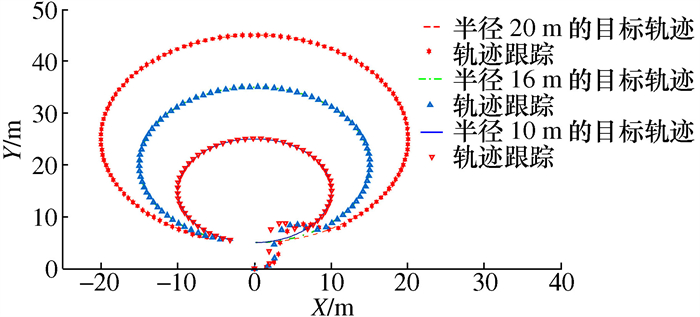
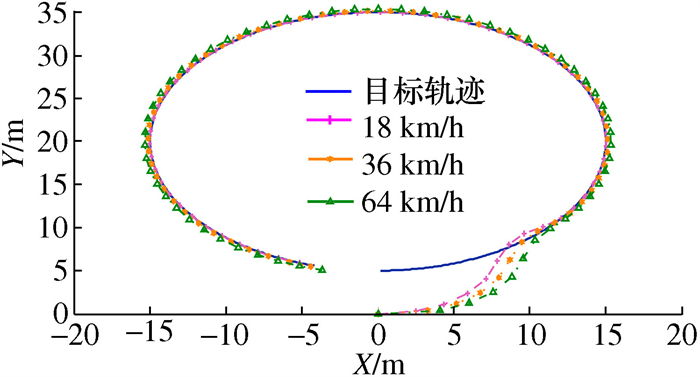
图 13 不同圆形半径路径跟踪效果对比图
Figure 13. Comparison of path tracking effects for different circular radii

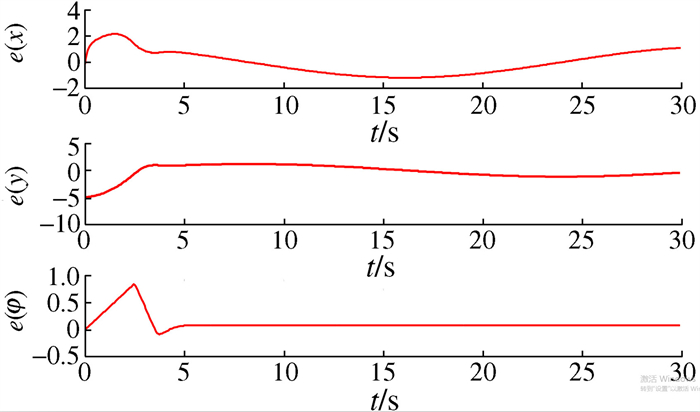
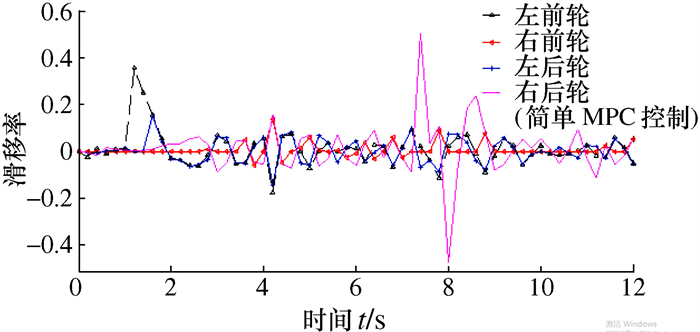
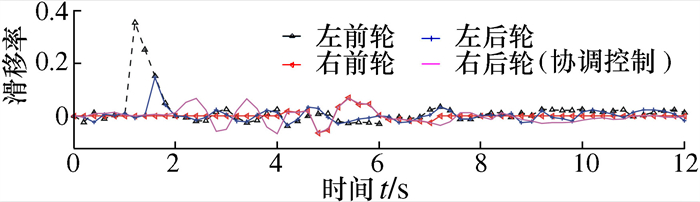
图 15 半径为15 m, 速度36 km/h的跟踪状态信息
Figure 15. Tracking state information for a radius of 15 m and a speed of 36 km/h
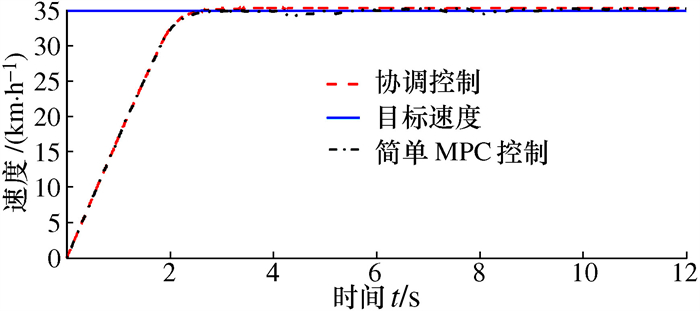
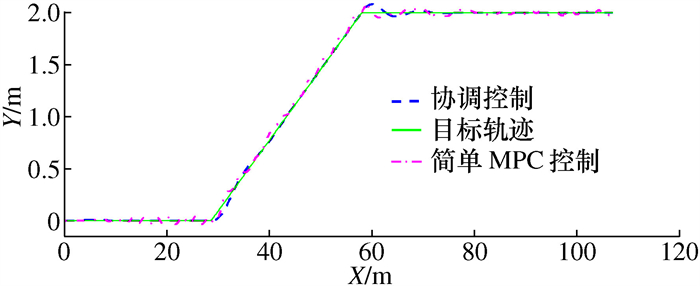
图 22 分层协调控制和MPC控制下速度跟踪对比
Figure 22. Comparison of speed tracking under layered coordinated control and MPC control
-
[1] 龚建伟, 姜岩, 徐威. 无人驾驶车辆模型预测控制[M]. 北京: 北京理工大学出版社, 2017: 1.GONG J W, JIANG Y, XU W. Model predictive control for self-driving vehicles[M]. Beijing: Beijing Institute of Technology Press, 2017: 1. (in Chinese) [2] SATO M, YAMAMOTO G, GUNJI D, et al. Development of wireless in-wheel motor using magnetic resonance coupling[J]. IEEE Transactions on Power Electronics, 2016, 31(7): 5270-5278. doi: 10.1109/TPEL.2015.2481182 [3] 陈虹, 刘志远, 解小华. 非线性模型预测控制的现状与问题[J]. 控制与决策, 2001, 16(4): 385-391. doi: 10.3321/j.issn:1001-0920.2001.04.001CHEN H, LIU Z Y, XIE X H. Nonlinear model predictive control: the state and open problems[J]. Control and Decision, 2001, 16(4): 385-391. (in Chinese) doi: 10.3321/j.issn:1001-0920.2001.04.001 [4] 余卓平, 侯誉烨, 熊璐, 等. 基于反步法的差动转向无人车辆轨迹跟踪于动[J]. 汽车工程, 2019, 41(11): 1229-1234. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201911002.htmYU Z P, HOU Y Y, XIONG L, et al. Trajectory tracking of skid steer unmanned vehicle based on backstepping[J]. Automotive Engineering, 2019, 41(11): 1229-1234. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201911002.htm [5] 施国标, 周倩, 王帅, 等. 无人驾驶模式下电液复合转向系统高鲁棒性控制策略[J]. 农业机械学报, 2019, 50(12): 395-402. doi: 10.6041/j.issn.1000-1298.2019.12.046SHI G B, ZHOU Q, WANG S, et al. High robust control strategy for electro-hydraulic hybrid steering system in unmanned mode[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(12): 395-402. (in Chinese) doi: 10.6041/j.issn.1000-1298.2019.12.046 [6] 赵克刚, 郭泉成, 裴锋, 等. 基于最优控制的智能车轨迹跟踪算法[J]. 机械与电子, 2018, 36(7): 76-80. doi: 10.3969/j.issn.1001-2257.2018.07.017ZHAO K G, GUO Q C, PEI F, et al. The trajectory tracking method of intelligent vehicle based on optimality control[J]. Machinery & Electronics, 2018, 36(7): 76-80. (in Chinese) doi: 10.3969/j.issn.1001-2257.2018.07.017 [7] 安聪. 两轮自平衡车轨迹跟踪控制关键技术研究[D]. 大连: 大连理工大学, 2016.AN C. Research on for a two-wheeled self-balancing vehicle trajectory tracking key technology[D]. Dalian: Dalian University of Technology, 2016. (in Chinese) [8] 姜岩, 龚建伟, 熊光明, 等. 基于运动微分约束的无人车辆纵横向协同规划算法的研究[J]. 自动化学报, 2013, 39(12): 2012-2020. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201312005.htmJIANG Y, GONG J W, XIONG G M, et al. Research on differential constraints-based planning algorithm for autonomous-driving vehicles[J]. Acta Automatica Sinica, 2013, 39(12): 2012-2020. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201312005.htm [9] 赵熙俊, 陈慧岩. 智能车辆路径跟踪横向控制方法的研究[J]. 汽车工程, 2011, 33(5): 382-387. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201105005.htmZHAO X J, CHEN H Y. A study on lateral control method for the path tracking of intelligent vehicles[J]. Automotive Engineering, 2011, 33(5): 382-387. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC201105005.htm [10] 由智恒. 基于MPC算法的无人驾驶车辆轨迹跟踪控制研究[D]. 长春: 吉林大学, 2018.YOU Z H. Research on model predictive control-based trajectory tracking for unmanned vehicles[D]. Changchun: Jilin University, 2018. (in Chinese) [11] GONG J W, XU W, JIANG Y, et al. Multi-constrained model predictive control for autonomous ground vehicle trajectory tracking[J]. Journal of Beijing Institute of Technology, 2015, 24(4): 441-448. [12] 孙银健. 基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法研究[D]. 北京: 北京理工大学, 2015.SUN Y J. Research on model predictive control-based trajectory tracking algorithm for unmanned vehicles[D]. Beijing: Beijing Institute of Technology, 2015. (in Chinese) [13] FALCONE P, BORRELLI F, ASGARI J, et al. Predictive active steering control for autonomous vehicle systems[J]. IEEE Transactions on Control Systems Technology, 2007, 15(3): 566-580. doi: 10.1109/TCST.2007.894653 [14] 李培新, 姜小燕, 魏燕定, 等. 基于跟踪误差模型的无人驾驶车辆预测控制方法[J]. 农业机械学报, 2017, 48(10): 351-357. doi: 10.6041/j.issn.1000-1298.2017.10.045LI P X, JIANG X Y, WEI Y D, et al. Predictive control method of autonomous vehicle based on tracking-error model[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(10): 351-357. (in Chinese) doi: 10.6041/j.issn.1000-1298.2017.10.045 [15] BROWN M, FUNKE J, ERLIEN S, et al. Safe driving envelopes for path tracking in autonomous vehicles[J]. Control Engineering Practice, 2017, 61: 307-316. doi: 10.1016/j.conengprac.2016.04.013 [16] 毛丁丁, 邓亚东. 四轮转向智能车辆轨迹跟踪及稳定控制研究[J]. 机械科学与技术, 2020, 39(7): 1094-1099. doi: 10.13433/j.cnki.1003-8728.20190247MAO D D, DENG Y D. Research on trajectory tracking and stability control of 4WS intelligent vehicle[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(7): 1094-1099. (in Chinese) doi: 10.13433/j.cnki.1003-8728.20190247 [17] 高秀晶, 陶林君, 黄红武, 等. 复杂道路下自动驾驶车辆的横向运动鲁棒控制策略[J]. 汽车安全与节能学报, 2020, 11(4): 454-461. doi: 10.3969/j.issn.1674-8484.2020.04.004GAO X J, TAO L J, HUANG H W, et al. Lateral motion robust control strategy of automated vehicle in complex road conditions[J]. Journal of Automotive Safety and Energy, 2020, 11(4): 454-461. (in Chinese) doi: 10.3969/j.issn.1674-8484.2020.04.004 [18] 余卓平, 冯源, 熊璐. 分布式驱动电动汽车动力学控制发展现状综述[J]. 机械工程学报, 2013, 49(8): 105-114. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201308016.htmYU Z P, FENG Y, XIONG L. Review on vehicle dynamics control of distributed drive electric vehicle[J]. Journal of Mechanical Engineering, 2013, 49(8): 105-114. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201308016.htm [19] CAO Y, ZHAI L, SUN T M, et al. Straight running stability control based on optimal torque distribution for a four in-wheel motor drive electric vehicle[J]. Energy Procedia, 2017, 105: 2825-2830. [20] WANG J, NAN J R, XU X L, et al. Control strategy and simulation of four-wheel-hub vehicles torque distribution on bisectional road[J]. Energy Procedia, 2017, 105: 2666-2671. [21] 高巧明, 高峰, 赖永裕, 等. 具有平衡摇臂悬架的丘陵山区动力平台转向系统[J]. 农业机械学报, 2014, 45(3): 13-19. https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201403003.htmGAO Q M, GAO F, LAI Y Y, et al. Steering system design of hilly power chassis with balance rocker suspension[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(3): 13-19. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201403003.htm [22] 胡包钢, 应浩. 模糊PID控制技术研究发展回顾及其面临的若干重要问题[J]. 自动化学报, 2001, 27(4): 567-584. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO200104011.htmHU B G, YING H. Review of fuzzy PID control techniques and some important issues[J]. Acta Automatica Sinica, 2001, 27(4): 567-584. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO200104011.htm [23] 张强, 曲仕茹. 车辆自适应巡航控制系统的模糊PID实现[J]. 汽车工程, 2008, 30(7): 569-572. https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC200807004.htmZHANG Q, QU S R. Vehicle adaptive cruise control based on fuzzy PID algorithm[J]. Automotive Engineering, 2008, 30(7): 569-572. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-QCGC200807004.htm [24] 张维彪, 贾利, 和龙, 等. 论域自调整模糊PID控制算法设计与仿真[J]. 小型内燃机与摩托车, 2012, 41(5): 54-59. https://www.cnki.com.cn/Article/CJFDTOTAL-XXNR201205015.htmZHANG W B, JIA L, HE L. Design and simulation of self-tuning domain fuzzy-PID control algorithm[J]. Small Internal Combustion Engine and Motorcycle, 2012, 41(5): 54-59. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XXNR201205015.htm [25] 关新平. 橡胶压块机电控系统设计[J]. 汽车工程, 2012(11): 32-33. https://www.cnki.com.cn/Article/CJFDTOTAL-DBZX200601004.htmGUAN X P. Design of rubber hold-down electromechanical control system[J]. Electric Engineering, 2012(11): 32-33. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DBZX200601004.htm -

 下载:
下载:
 点击查看大图
点击查看大图
计量
- 文章访问数: 166
- HTML全文浏览量: 136
- PDF下载量: 66
- 被引次数: 0
