




Adaptive Sliding Mode Control of Disturbance Observer for Multi-joint Manipulator
-
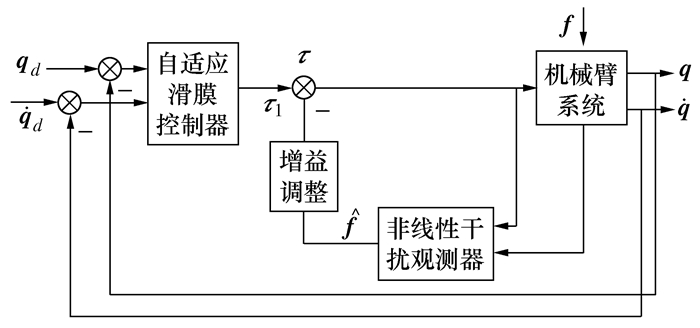
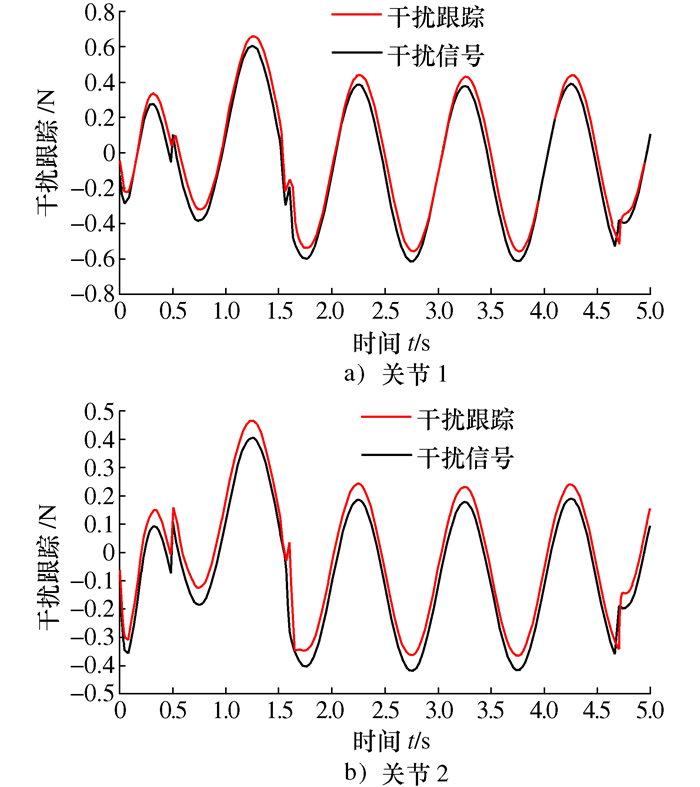
摘要: 为了解决多关节机械臂在外部干扰和建模误差的轨迹跟踪问题,提出了多关节机械臂干扰观测器的机械臂自适应滑模控制方法。针对干扰信号,采用干扰观测器对可观测干扰进行观测,对于未观测到的干扰通过自适应律的设计进行估计补偿;针对机械臂控制系统中的抖振问题,采用新型趋近律来设计滑模控制律,以减小抖振影响;最后,利用李雅普诺夫函数验证了系统的稳定性。仿真结果表明,该方法不仅可以有效地削弱抖振问题,而且还可以克服外界干扰和建模误差带来的不确定性,同时保证了系统的鲁棒性。Abstract: In order to solve the trajectory tracking problem of multi-joint manipulator considering external disturbance and modelling error, an adaptive sliding mode control method of disturbance observer for multi-joint manipulator is proposed in this paper. For the disturbance signal, the disturbance observer is used to observe the observable disturbance, and the unknown disturbance is estimated and compensated by designing adaptive law. For the chattering problem in the manipulator control system, a new reaching law is used to design the sliding mode control law to reduce the chattering effect. Finally, the stability of the controlled system is verified by Lyapunov function. The simulation results show that this method can not only effectively weaken the chattering problem, but also overcome the uncertainty caused by external disturbance and modelling error, and ensure the robustness of the system.
-
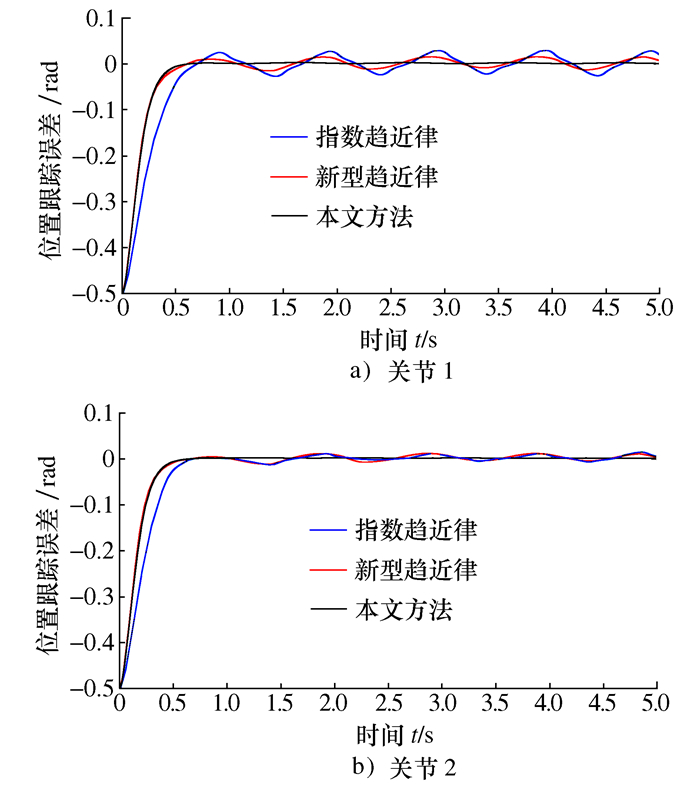
表 1 算法改进前后仿真数据对比
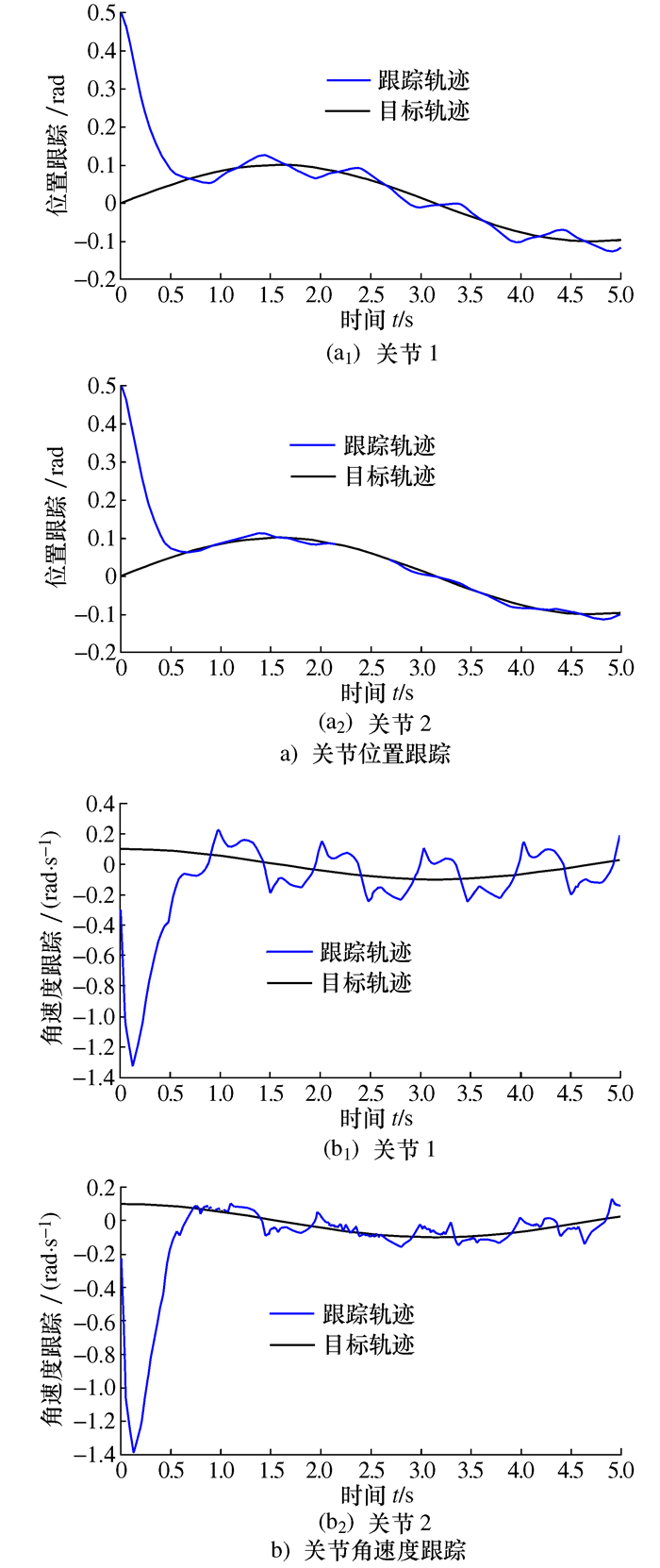
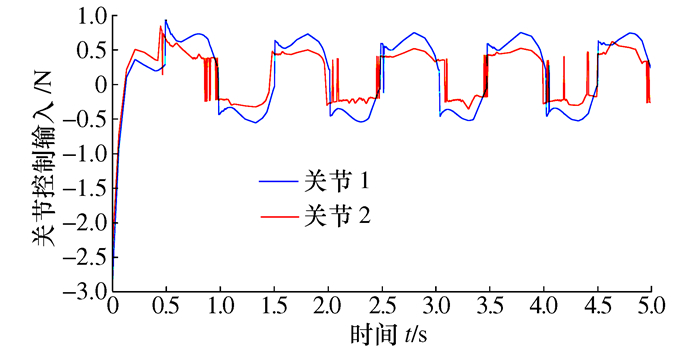
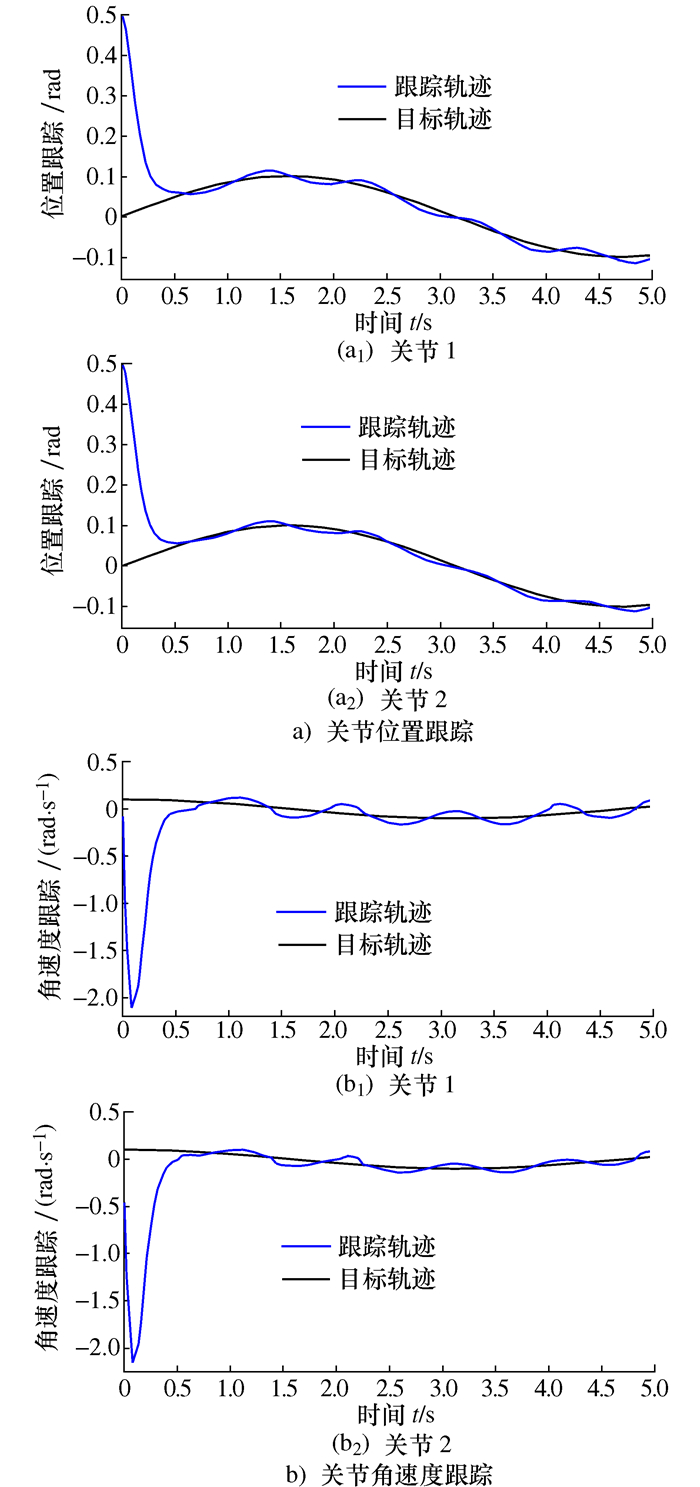
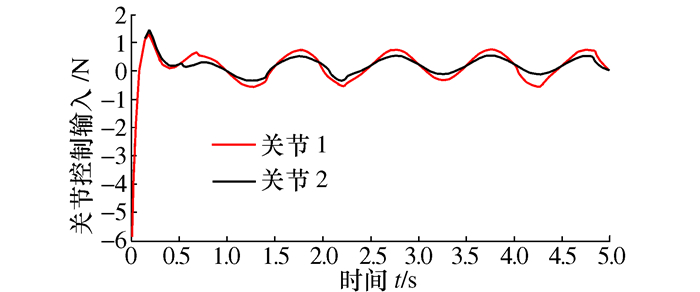
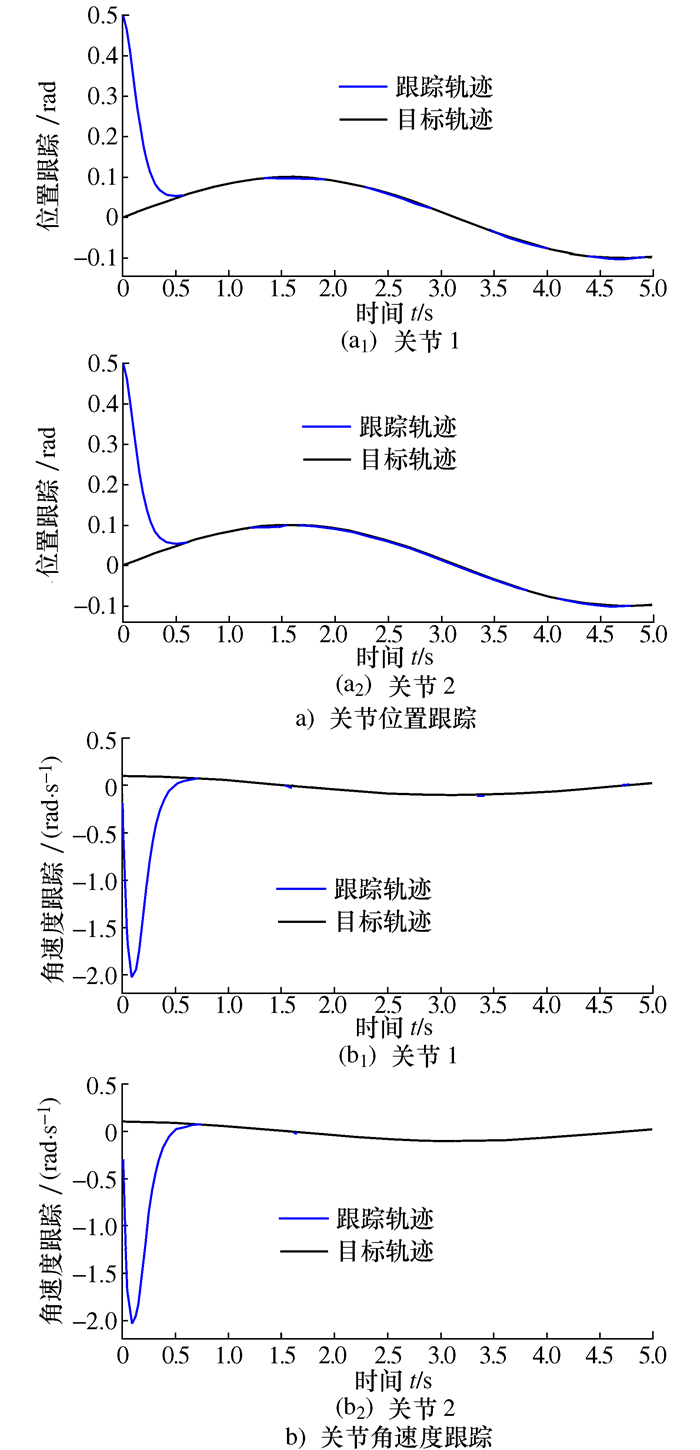
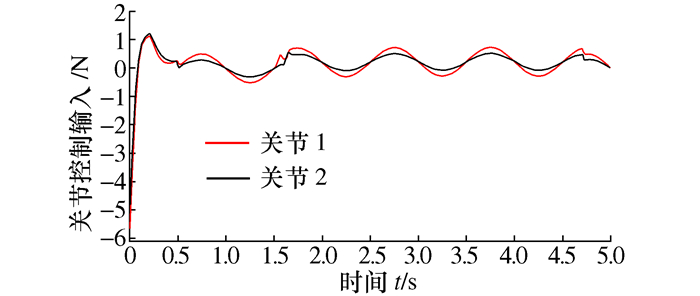
算法 关节 最大位置跟踪误差/rad 最大角速度跟踪误差/(rad·s-1) 最大关节控制输入/N 指数趋近律 1 0.029 15 0.208 5 0.935 1 2 0.014 86 0.134 1 0.846 9 新型趋近律 1 0.015 48 0.109 1 0.766 4 2 0.011 78 0.085 27 0.547 5 本文方法 1 0.003 06 0.015 2 0.718 4 2 0.002 183 0.011 95 0.513 0  下载: 导出CSV
下载: 导出CSV
-
[1] 王伟, 赵健廷, 胡宽荣, 等. 基于快速非奇异终端滑模的机械臂轨迹跟踪方法[J]. 吉林大学学报, 2020, 50(2): 464-471 https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY202002009.htmWANG W, ZHAO J T, HU K R, et al. Trajectory tracking of robotic manipulators based on fast nonsingular terminal sliding mode[J]. Journal of Jilin University, 2020, 50(2): 464-471 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JLGY202002009.htm [2] 万凯歌, 吴爱国, 董娜, 等. 3-DOF空间机械臂新型滑模轨迹跟踪控制[J]. 中南大学学报, 2017, 48(12): 3248-3255 doi: 10.11817/j.issn.1672-7207.2017.12.015WAN K G, WU A G, DONG N, et al. A novel sliding mode controller for trajectory tracking of 3 DOF spatial robot manipulators[J]. Journal of Central South University, 2017, 48(12): 3248-3255 (in Chinese) doi: 10.11817/j.issn.1672-7207.2017.12.015 [3] 刘金琨, 孙富春. 滑模变结构控制理论及其算法研究与进展[J]. 控制理论与应用, 2007, 24(3): 407-418 doi: 10.3969/j.issn.1000-8152.2007.03.015LIU J K, SUN F C. Research and development on theory and algorithms of sliding mode control[J]. Control Theory & Applications, 2007, 24(3): 407-418 (in Chinese) doi: 10.3969/j.issn.1000-8152.2007.03.015 [4] 李光, 符浩. 无模型机械臂BP神经网络状态观测及反演跟踪控制[J]. 中国机械工程, 2016, 27(7): 859-865 doi: 10.3969/j.issn.1004-132X.2016.07.002LI G, FU H. BP neural network state observation and backstepping tracking control of model-free robotic manipulators[J]. China Mechanical Engineering, 2016, 27(7): 859-865 (in Chinese) doi: 10.3969/j.issn.1004-132X.2016.07.002 [5] 覃艳明, 赵静一, 马金玉, 等. 八自由度机械臂的轨迹跟踪控制[J]. 中国机械工程, 2019, 30(22): 2741-2747, 2756 doi: 10.3969/j.issn.1004-132X.2019.22.014QIN Y M, ZHAO J Y, MA J Y, et al. Trajectory tracking control of eight-DOF manipulators[J]. China Mechanical Engineering, 2019, 30(22): 2741-2747, 2756 (in Chinese) doi: 10.3969/j.issn.1004-132X.2019.22.014 [6] 刘晶, 普杰信, 牛新月. 基于神经网络滑模的机械臂轨迹跟踪控制方法[J]. 计算机工程与设计, 2019, 40(7): 1934-1938 https://www.cnki.com.cn/Article/CJFDTOTAL-SJSJ201907022.htmLIU J, PU J X, NIU X Y. Trajectory tracking control method of manipulators based on neural network sliding mode[J]. Computer Engineering and Design, 2019, 40(7): 1934-1938 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-SJSJ201907022.htm [7] CHEN W H, BALLANCE D J, GAWTHROP P J, et al. A nonlinear disturbance observer for robotic manipulators[J]. IEEE Transactions on Industrial Electronics, 2000, 47(4): 932-938 doi: 10.1109/41.857974 [8] LAGHROUCHE S, PLESTAN F, GLUMINEAU A. Higher order sliding mode control based on integral sliding mode[J]. Automatica, 2007, 43(3): 531-537 doi: 10.1016/j.automatica.2006.09.017 [9] 刘向杰, 韩耀振. 多输入多输出非线性不确定系统连续高阶滑模控制[J]. 控制理论与应用, 2016, 33(9): 1236-1244 https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201609013.htmLIU X J, HAN Y Z. Continuous higher-order sliding mode control for multi-input multi-output nonlinear uncertain system[J]. Control Theory & Applications, 2016, 33(9): 1236-1244 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201609013.htm [10] WANG L, SHENG Y Z, LIU X D. A novel adaptive high-order sliding mode control based on integral sliding mode[J]. International Journal of Control, Automation and Systems, 2014, 12(3): 459-472 doi: 10.1007/s12555-013-0361-9 [11] 高为炳. 变结构控制的理论及设计方法[M]. 北京: 科学出版社, 1996GAO W B. Theory and design method of variable structure control[M]. Beijing: Science Press, 1996 (in Chinese) [12] 张合新, 范金锁, 孟飞, 等. 一种新型滑模控制双幂次趋近律[J]. 控制与决策, 2013, 28(2): 289-293 https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201302024.htmZHANG H X, FAN J S, MENG F, et al. A new double power reaching law for sliding mode control[J]. Control and Decision, 2013, 28(2): 289-293 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201302024.htm [13] 张国山, 李现磊. 一种滑模控制新型幂次趋近律的设计与分析[J]. 天津大学学报, 2020, 53(11): 1112-1119 https://www.cnki.com.cn/Article/CJFDTOTAL-TJDX202011002.htmZHANG G S, LI X L. Design and analysis of a new power reaching law for sliding mode control[J]. Journal of Tianjin University, 2020, 53(11): 1112-1119 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-TJDX202011002.htm [14] 周涛. 基于一种新型趋近律的自适应滑模控制[J]. 控制与决策, 2016, 31(7): 1335-1338 https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201607031.htmZHOU T. Adaptive sliding control based on a new reaching law[J]. Control and Decision, 2016, 31(7): 1335-1338 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201607031.htm [15] 吴爱国, 刘海亭, 董娜. 机械臂神经网络非奇异快速终端滑模控制[J]. 农业机械学报, 2018, 49(2): 395-404, 240 https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201802051.htmWU A G, LIU H T, DONG N. Nonsingular fast terminal sliding mode control of robotic manipulators based on neural networks[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2): 395-404, 240 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201802051.htm [16] 杨亮, 陈勇, 刘治. 基于参数不确定机械臂系统的自适应轨迹跟踪控制[J]. 控制与决策, 2019, 34(11): 2485-2490 https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201911028.htmYANG L, CHEN Y, LIU Z. Adaptive trajectory tracking control for manipulator with uncertain dynamics and kinematics[J]. Control and Decision, 2019, 34(11): 2485-2490 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201911028.htm [17] 胡灵美, 陈杨, 陈俊风, 等. 基于自适应模糊补偿的机械臂复合控制策略[J]. 信息与控制, 2016, 45(3): 342-347 https://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201603014.htmHU L M, CHEN Y, CHEN J F, et al. Compound control strategy for manipulator based on adaptive fuzzy compensation[J]. Information and Control, 2016, 45(3): 342-347 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201603014.htm [18] 姚来鹏, 侯保林. 随机振动机械臂的自适应鲁棒滑模控制[J]. 中国机械工程, 2016, 27(5): 694-697 doi: 10.3969/j.issn.1004-132X.2016.05.022YAO L P, HOU B L. Adaptive sliding mode control of Robotic manipulators with external uncertain stochastic vibration[J]. China Mechanical Engineering, 2016, 27(5): 694-697 (in Chinese) doi: 10.3969/j.issn.1004-132X.2016.05.022 [19] 席雷平, 陈自力, 齐晓慧. 基于非线性干扰观测器的机械臂自适应反演滑模控制[J]. 信息与控制, 2013, 42(4): 470-477 https://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201304011.htmXI L P, CHEN Z L, QI X H. Adaptive backstepping sliding mode control for robotic manipulator with nonlinear disturbance observer[J]. Information and Control, 2013, 42(4): 470-477 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201304011.htm [20] 林雷, 王洪瑞, 任华彬. 基于模糊变结构的机械臂控制[J]. 控制理论与应用, 2007, 24(4): 643-645, 650 doi: 10.3969/j.issn.1000-8152.2007.04.025LIN L, WANG H R, REN H B. Fuzzy-based variable structure control for robotic manipulators[J]. Control Theory & Applications, 2007, 24(4): 643-645, 650 (in Chinese) doi: 10.3969/j.issn.1000-8152.2007.04.025 [21] 梁骅旗, 米根锁. 基于干扰观测器的机械臂改进趋近律的滑模控制[J]. 测控技术, 2019, 38(1): 140-144 https://www.cnki.com.cn/Article/CJFDTOTAL-IKJS201901031.htmLIANG H Q, MI G S. An improved reaching law of sliding mode control for robotic manipulator based on disturbance observer[J]. Measurement & Control Technology, 2019, 38(1): 140-144 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-IKJS201901031.htm [22] 周涛, 王磊. 基于新型开关切换函数的机器人滑模控制[J]. 光电工程, 2017, 44(5): 534-538 https://www.cnki.com.cn/Article/CJFDTOTAL-GDGC201705009.htmZHOU T, WANG L. Sliding model control of robot manipulator based on a novel switching function[J]. Opto-Electronic Engineering, 2017, 44(5): 534-538 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GDGC201705009.htm -

 点击查看大图
点击查看大图
图(11) / 表(1)
计量
- 文章访问数: 201
- HTML全文浏览量: 38
- PDF下载量: 37
- 被引次数: 0
