




Construction of Seam Tracking Control Model for Laser Welding Machine of Bimetal Saw Blade
-
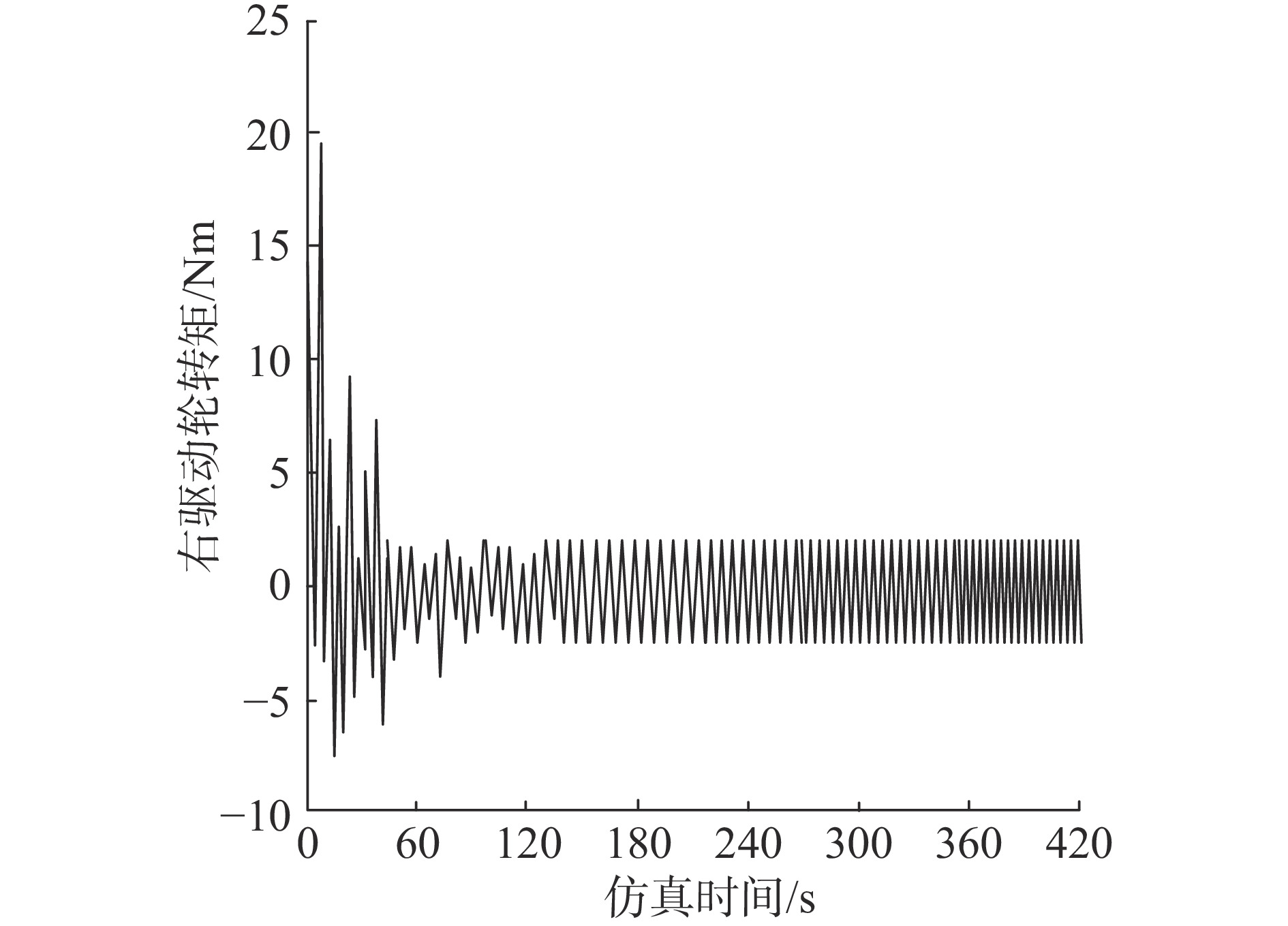
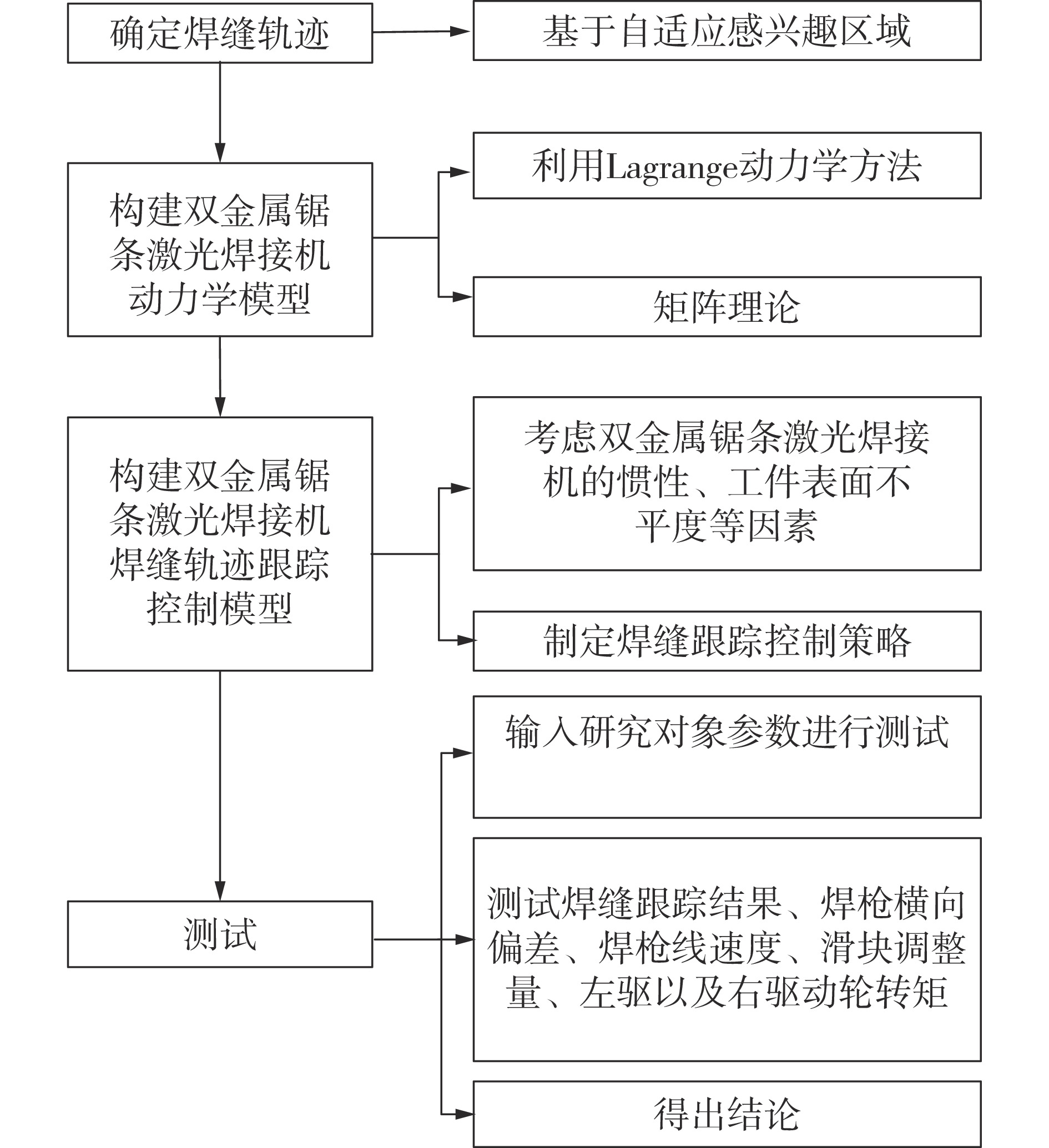
摘要: 以提升双金属锯条激光焊接机焊缝轨迹跟踪精度为目的,构建双金属锯条激光焊接机焊缝轨迹跟踪控制模型。采用基于自适应感兴趣区域的方法预处理焊缝轨迹图像,利用水平投影法获取焊缝轨迹中心线,根据焊缝位置处激光条纹有间断的特点,经由扫描激光条纹中心线可以获取焊缝的特征信息,由此确定焊缝轨迹。考虑非完整约束性,利用Lagrange动力学方法描述双金属锯条激光焊接机的动力学模型,基于动力学模型,根据跟踪过程中焊枪点与焊缝轨迹中心线的距离和横向滑块的极限长度间的相关性,制定不同的焊缝跟踪控制策略,考虑双金属锯条激光焊接机的惯性、工件表面不平度等因素,设计基于移动焊接机器人动力学和十字滑块协调控制的滑模变结构控制模型。应用测试结果显示该模型控制下,研究对象焊缝轨迹跟踪结果与实际轨迹基本重合。Abstract: In order to improve the tracking accuracy of the welding seam of the double metal saw blade laser welding machine, the welding seam tracking control model for the double metal saw blade laser welding machine was established. The method based on adaptive region of interest (ROI) is used to preprocess the weld track image, and the center line of weld track is obtained by using the horizontal projection method. According to the characteristics of laser stripe discontinuity at the weld position, the characteristic information of weld can be obtained by using the scanning the center line of laser stripe, thus the weld track can be determined. Considering the nonholonomic constraints, the dynamic model for the laser welding machine of bimetal saw blade is described by using Lagrange dynamics method. Based on the dynamic model, different seam tracking control strategies are formulated according to the correlation between the distance between the welding gun and the center line of the weld track and the limit length of the transverse slider in the tracking process. The inertia and workpiece table of the laser welding machine for bimetal saw blade are considered. The sliding mode variable structure control model is designed based on the dynamics of mobile welding robot and the coordinated control of cross slider. The test results show that under the control of the model, the tracking results of the welding seam track of the research object basically coincide with the actual track.
-
Key words:
- bimetal saw blade /
- laser welding machine /
- weld track /
- tracking /
- control /
- dynamic model
-
表 1 研究对象参数设置
名称 数值 研究对象本体的转动惯量 2.6 kg·mm2 电机与传动机构间的黏性摩擦因素 0.01 驱动轮的转动惯量 0.05 kg·mm2 驱动轮半径 45 mm 焊枪点到研究对像本体中轴线的距离 195 mm 量驱动轮间的距离 245 mm 驱动轮轴上初始位置点到本体中轴线的距离 385 mm  下载: 导出CSV
下载: 导出CSV
-
[1] 王保民, 张明亮. 基于RBF神经网络的弧焊机器人轨迹跟踪控制方法[J]. 兰州理工大学学报, 2019, 45(3): 85-89 doi: 10.3969/j.issn.1673-5196.2019.03.016WANG B M, ZHANG M L. Control method for arc-welding robot with trajectory tracking based on RBF neural network[J]. Journal of Lanzhou University of Technology, 2019, 45(3): 85-89 (in Chinese) doi: 10.3969/j.issn.1673-5196.2019.03.016 [2] 宋子浩, 吴斌, 周挺. 输入受限情况下的球形机器人轨迹跟踪控制[J]. 中国测试, 2020, 46(5): 120-126 doi: 10.11857/j.issn.1674-5124.2019120094SONG Z H, WU B, ZHOU T. Trajectory tracking control of a spherical robot under input saturation[J]. China Measurement & Testing Technology, 2020, 46(5): 120-126 (in Chinese) doi: 10.11857/j.issn.1674-5124.2019120094 [3] 文婷, 蔡知旺, 郑永飞. 激光焊接机的优化设计与运动仿真[J]. 制造技术与机床, 2020(3): 58-61WEN T, CAI Z W, ZHENG Y F. Optimization design and motion simulation of laser welding machine[J]. Manufacturing Technology & Machine Tool, 2020(3): 58-61 (in Chinese) [4] 林远长, 王锐, 石珍, 等. 轻量化汽车焊接机器人视觉测量及焊接轨迹跟踪[J]. 机械设计与研究, 2018, 34(2): 10-14,20LIN Y C, WANG R, SHI Z, et al. Vision measurement and weld trajectory tracking of lightweight automobile welding robot[J]. Machine Design & Research, 2018, 34(2): 10-14,20 (in Chinese) [5] 郑伟勇, 李艳玮. 基于前馈-反馈的移动机器人轨迹跟踪控制[J]. 计算机工程与设计, 2017, 38(2): 539-543ZHENG W Y, LI Y W. Traj ectory tracking of wheeled mobile robot based on feed-forward and feedback controller[J]. Computer Engineering and Design, 2017, 38(2): 539-543 (in Chinese) [6] 魏延辉, 贾献强, 高延滨, 等. 基于NDO的ROV滤波反步轨迹跟踪控制[J]. 仪器仪表学报, 2017, 38(1): 112-119 doi: 10.3969/j.issn.0254-3087.2017.01.015WEI Y H, JIA X Q, GAO Y B. Command filtered backstepping path tracking control for ROV based on NDO[J]. Chinese Journal of Scientific Instrument, 2017, 38(1): 112-119 (in Chinese) doi: 10.3969/j.issn.0254-3087.2017.01.015 [7] 刘卫朋, 邢关生, 陈海永, 等. 基于增强学习的机械臂轨迹跟踪控制[J]. 计算机集成制造系统, 2018, 24(8): 1996-2004LIU W P, XING G S, CHEN H Y, et al. Robotic trajectory tracking control method based on reinforcement learning[J]. Computer Integrated Manufacturing Systems, 2018, 24(8): 1996-2004 (in Chinese) [8] 沈智鹏, 曹晓明. 基于扩张观测器的输入受限四旋翼飞行器轨迹跟踪动态面输出反馈控制[J]. 系统工程与电子技术, 2018, 40(12): 2766-2774 doi: 10.3969/j.issn.1001-506X.2018.12.21SHEN Z P, CAO X M. Extended state observer based dynamic surface output feedback control for quadrotor UAV trajectory tracking with input constraints[J]. Systems Engineering and Electronics, 2018, 40(12): 2766-2774 (in Chinese) doi: 10.3969/j.issn.1001-506X.2018.12.21 [9] 卞永明, 杨濛, 刘宇超, 等. 履带式移动机器人轨迹跟踪控制技术研究[J]. 中国工程机械学报, 2018, 16(3): 189-193,206BIAN Y M, YANG M, LIU Y C, et al. Research on trajectory tracking control of a tracked mobile robot[J]. Chinese Journal of Construction Machinery, 2018, 16(3): 189-193,206 (in Chinese) [10] 王宁, 王永, 余明裕. 四旋翼飞行器自适应动态面轨迹跟踪控制[J]. 控制理论与应用, 2017, 34(9): 1185-1194 doi: 10.7641/CTA.2017.60867WANG N, WANG Y, YU M Y. Adaptive dynamic surface trajectory tracking control of a quadrotor unmanned aerial vehicle[J]. Control Theory & Applications, 2017, 34(9): 1185-1194 (in Chinese) doi: 10.7641/CTA.2017.60867 [11] LAHDENOJA O, SÄNTTI T, POIKONEN J K, et al. Embedded processing methods for online visual analysis of laser welding[J]. Journal of Real-Time Image Processing, 2019, 16(4): 1099-1116 doi: 10.1007/s11554-016-0605-z [12] 周结华, 代冀阳, 周继强, 等. 面向大型机场草坪的割草机器人路径规划及轨迹跟踪控制研究[J]. 工程设计学报, 2019, 26(2): 146-152 doi: 10.3785/j.issn.1006-754X.2019.02.004ZHOU J H, DAI J Y, ZHOU J Q, et al. Research on path planning and trajectory tracking control of mowing robot for large airport lawn[J]. Chinese Journal of Engineering Design, 2019, 26(2): 146-152 (in Chinese) doi: 10.3785/j.issn.1006-754X.2019.02.004 [13] 陈琦, 王旭刚. 非奇异快速终端滑模及动态面控制的轨迹跟踪制导律[J]. 国防科技大学学报, 2020, 42(1): 91-100 doi: 10.11887/j.cn.202001013CHEN Q, WANG X G. Trajectory tracking using nonsingular fast terminal sliding mode control and dynamic surface control[J]. Journal of National University of Defense Technology, 2020, 42(1): 91-100 (in Chinese) doi: 10.11887/j.cn.202001013 [14] 赵纯, 于存贵, 何庆, 等. 电液伺服型并联式加注机器人运动轨迹跟踪控制[J]. 宇航学报, 2019, 40(5): 585-595 doi: 10.3873/j.issn.1000-1328.2019.05.012ZHAO C, YU C G, HE Q, et al. Motion trajectory tracking control of an electro-hydraulic servo parallel filling robot[J]. Journal of Astronautics, 2019, 40(5): 585-595 (in Chinese) doi: 10.3873/j.issn.1000-1328.2019.05.012 [15] MUHAMMAD J, ALTUN H, ABO-SERIE E. Welding seam profiling techniques based on active vision sensing for intelligent robotic welding[J]. The International Journal of Advanced Manufacturing Technology, 2017, 88(1-4): 127-145 doi: 10.1007/s00170-016-8707-0 -




 点击查看大图
点击查看大图
图(9) / 表(1)
计量
- 文章访问数: 103
- HTML全文浏览量: 56
- PDF下载量: 20
- 被引次数: 0
