




Research on Obstacle Avoidance Path Planning of Manipulators using Potential Energy Cost PRM Algorithm
-
摘要: 为了提高概率地图算法(Probabilistic roadmap method,PRM)规划结果的质量,提出势能代价PRM算法,将其应用于机械臂避障路径规划。建立规划空间任意节点的势能评价标准;定义困难区域节点,研究基于Metropolis准则的障碍空间节点调整策略;建立机械臂连杆的势能函数;给出机械臂任意位姿间的安全路径检查方法。仿真测试表明:性能方面,提出算法的规划质量和规划时间均优于PRM、OBPRM、高斯采样PRM算法;机械臂避障路径规划方面,提出算法的规划质量显著优于PRM算法,在规划质量和时间消耗上优于OBPRM和高斯采样PRM算法,且能使机械臂规避所有障碍并到达目标位姿。
-
关键词:
- PRM /
- 势能函数 /
- 机械臂 /
- 避障路径规划 /
- Metropolis准则
Abstract: In order to improve the quality of the path planning results of probabilistic roadmap method (PRM), a potential energy cost PRM algorithm was proposed and applied to the obstacle avoidance path planning of manipulators. Potential energy evaluation criteria for any node in planning space was established; difficult area nodes were defined, and an adjustment strategy of the nodes of obstacle space based on Metropolis criteria were studied; the potential energy function of manipulators' links was established. A safe path check method between any configurations of manipulators was given. Simulation test shows that the proposed algorithm is superior to PRM, OBPRM and Gaussian sampling PRM in terms of planning quality and time of planning; in the aspect of the obstacle avoidance path planning of manipulators, the proposed algorithm is superior to PRM algorithm in planning quality, and it is better than OBPRM and Gaussian sampling PRM algorithm in planning quality and time consumption, and can make manipulators avoid all obstacles and reach the objective posture.-
Key words:
- PRM /
- potential energy function /
- manipulators /
- obstacle avoidance path planning /
- Metropolis criterion
-

图 1
$ \angle {{\boldsymbol{O}}_k}{{\boldsymbol{\alpha}} _j}({\boldsymbol{q}}){{\boldsymbol{\beta}} _j}({\boldsymbol{q}})$ 与$\angle {{\boldsymbol{O}}_k}{{\boldsymbol{\beta}} _j}({\boldsymbol{q}}){{\boldsymbol{\alpha}} _j}({\boldsymbol{q}})$ 均小于90°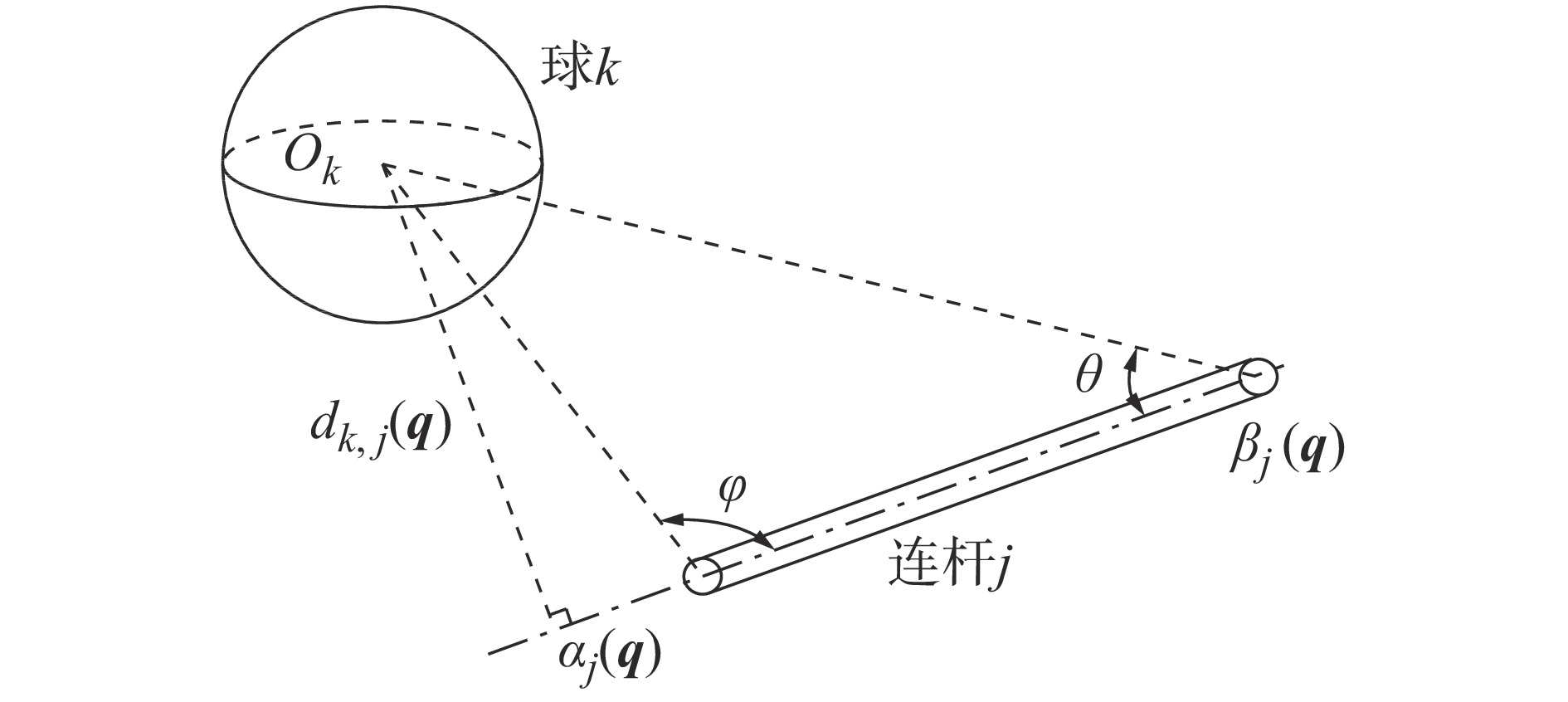
图 2
$\angle {{\boldsymbol{O}}_k}{{\boldsymbol{\alpha}} _j}({\boldsymbol{q}}){{\boldsymbol{\beta}} _j}({\boldsymbol{q}})$ 与$\angle {{\boldsymbol{O}}_k}{{\boldsymbol{\beta}} _j}({\boldsymbol{q}}){{\boldsymbol{\alpha}} _j}({\boldsymbol{q}})$ 有一角大于90°表 1 算法的参数设置
算法 自由空间
采点数安全距离s 邻节点距离
限制d起始点 目标点 T $ \sigma $ U $ \eta $ $ \lambda $ 高斯采样的
标准差PRM 400 0.1 2.5 (1,2) (18,18) 无 无 无 无 无 无 势能代价 PRM 1 2 4 2 8000 无 高斯采样 PRM 无 无 无 无 无 4 OBPRM 无 无 无 无 无 无  下载: 导出CSV
下载: 导出CSV
表 2 算法的SUC、S和t
规划环境 算法 评价指标 SUC/% S t/s 环境1
(图3)PRM 25 26.8812 2.3970 势能代价 PRM 100 24.9497 2.2932 高斯采样 PRM 85 26.0664 2.6305 OBPRM 85 25.6786 2.4634 环境2
(图4)PRM 20 27.5589 2.5760 势能代价 PRM 100 25.0830 2.3670 高斯采样 PRM 80 26.4508 2.7993 OBPRM 75 26.2120 2.6463 环境3
(图5)PRM 70 27.3970 3.2201 势能代价 PRM 100 25.1934 3.0808 高斯采样 PRM 100 26.2283 3.4381 OBPRM 95 26.4872 3.4242
下载: 导出CSV
表 3 KR5机械臂D-H参数
连杆j qj/(°) dj/m aj-1/m αj-1/(°) 1 [−180,180] 0.4000 0.1800 90 2 [−180,180] 0.1350 0.6000 180 3 [−180,180] 0.1350 0.1200 −90 4 [−180,180] 0.6200 0 90 5 [−180,180] 0 0 −90 6 [−180,180] 0 0 0
下载: 导出CSV
表 4 算法的参数设置
算法 自由空间
采点数安全
距离s连杆
半径阈值E 邻节点距
离限制 d起始位姿 目标位姿 T $ \sigma $ U $ \eta $ $ \lambda $ 高斯采样
的标准差PRM 1000 0.03 m 0.06 m 16° 32° [0°,30°,−20°,
20°,40°,0°][130°,40°,−50°,
50°,50°,0°]无 无 无 无 无 无 势能代价PRM 1 0.1 m 3 0.1 4000 无 高斯采样PRM 无 无 无 无 无 10 OBPRM 无 无 无 无 无 无
下载: 导出CSV
表 5 算法的SUC、S和t均值
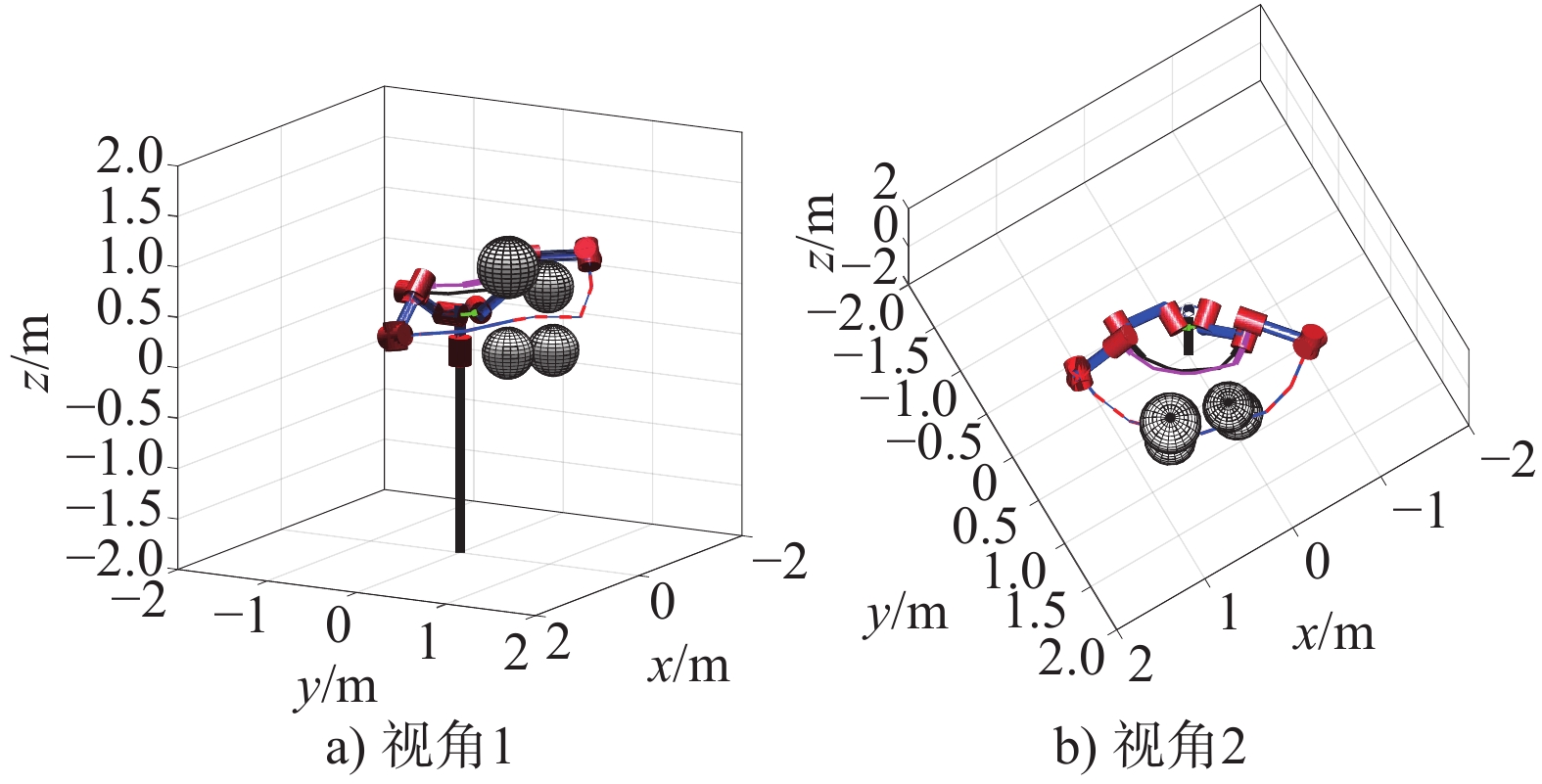
规划环境 算法 评价指标 SUC/% S t/s 环境1
(图6)PRM 5 149.3212 12.1450 势能代价 PRM 100 140.9779 27.5040 高斯采样 PRM 100 150.9876 64.1363 OBPRM 30 147.8766 40.4497 环境2
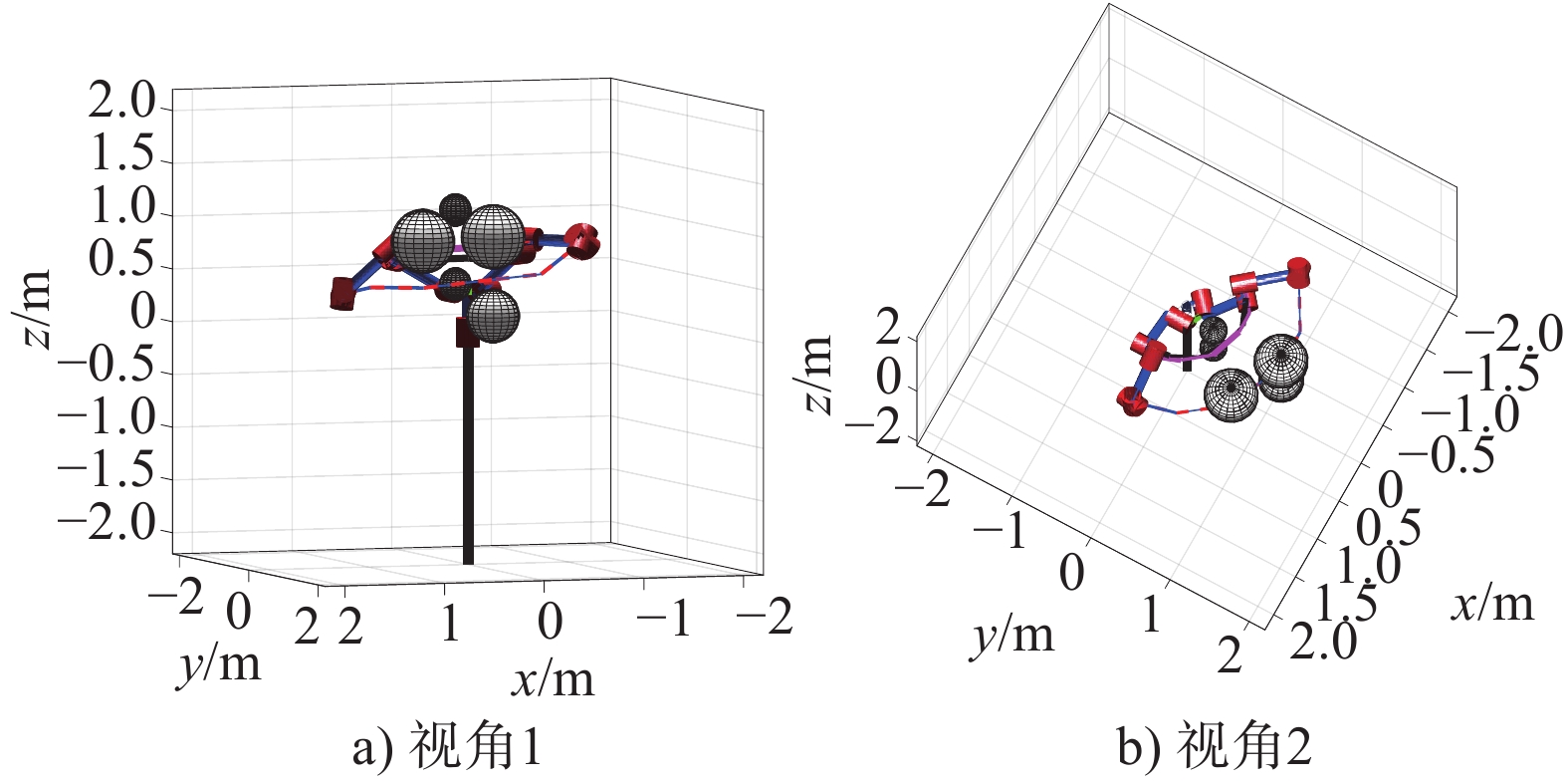
(图7)PRM 15 148.1819 12.1820 势能代价 PRM 100 141.6972 28.3279 高斯采样 PRM 100 148.8181 65.0375 OBPRM 55 147.0001 41.9689 环境3
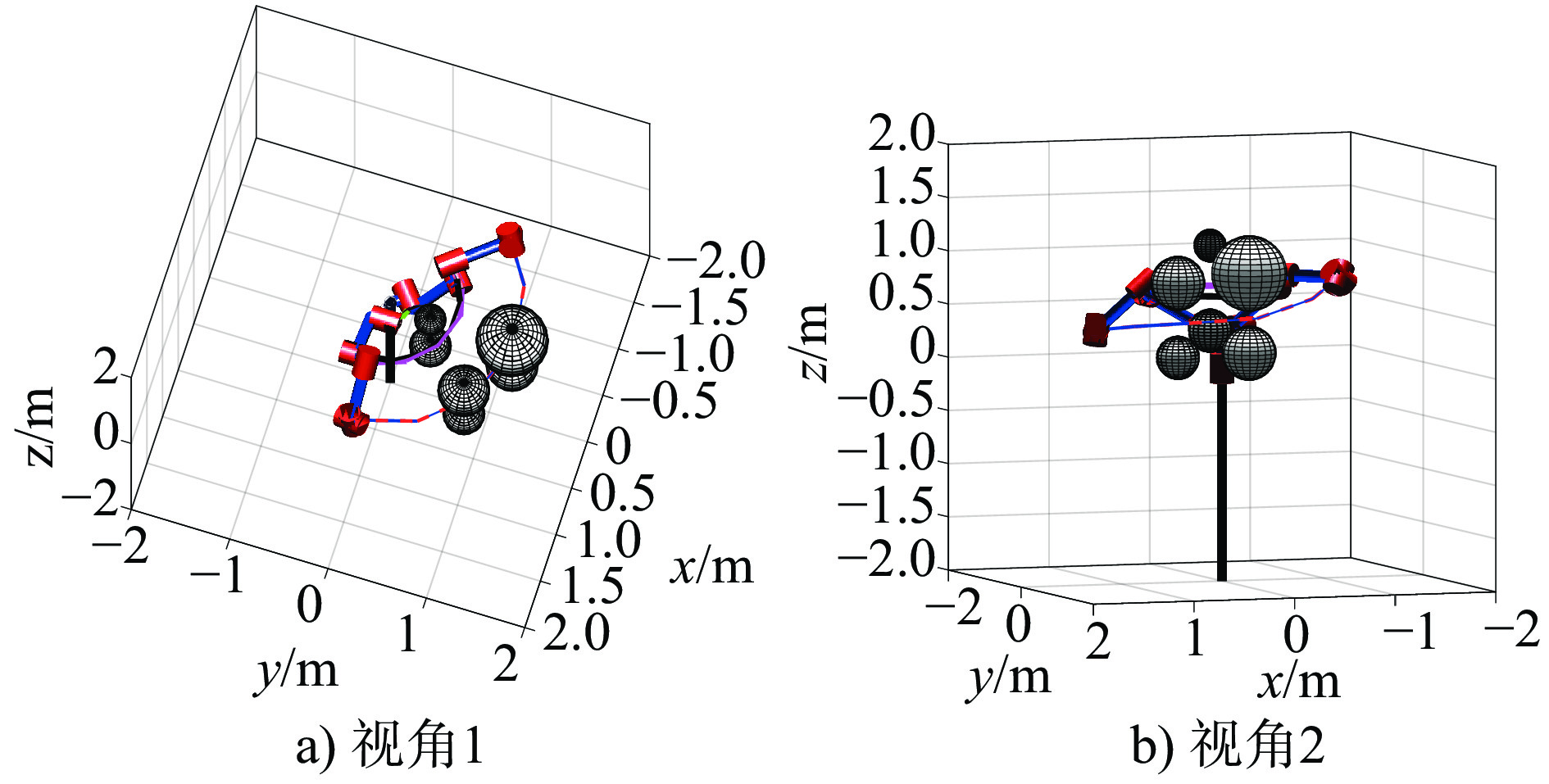
(图8)PRM 0 无 无 势能代价 PRM 100 141.0630 33.2550 高斯采样 PRM 90 158.5556 89.9397 OBPRM 0 无 无 环境4
(图9)PRM 0 无 无 势能代价 PRM 100 139.7262 37.9871 高斯采样 PRM 100 151.3292 90.2518 OBPRM 0 无 无
下载: 导出CSV
-
[1] 贾庆轩, 陈钢, 孙汉旭, 等. 基于A*算法的空间机械臂避障路径规划[J]. 机械工程学报, 2010, 46(13): 109-115 doi: 10.3901/JME.2010.13.109JIA Q X, CHEN G, SUN H X, et al. Path planning for space manipulator to avoid obstacle based on A* algorithm[J]. Journal of Mechanical Engineering, 2010, 46(13): 109-115 (in Chinese) doi: 10.3901/JME.2010.13.109 [2] WANG S K, ZHU L. Motion planning method for obstacle avoidance of 6-dof manipulator based on improved A* algorithm[J]. Journal of Donghua University, 2015, 32(1): 79-85 [3] WANG W R, ZHU M C, WANG X M, et al. An improved artificial potential field method of trajectory planning and obstacle avoidance for redundant manipulators[J]. International Journal of Advanced Robotic Systems, 2018, 15(5),doi: 10.1177/1729881418799562 [4] 钱堃, 贾凯, 宋潇. 基于低维映射和Q学习的机械臂避碰规划算法[J]. 华中科技大学学报(自然科学版), 2015, 43(SI): 468-472QIAN K, JIA K, SONG X. Robot manipulator avoidance planning based on low-dimensional mapping and Q-learning[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2015, 43(SI): 468-472 (in Chinese) [5] 徐帷, 卢山. 基于Sarsa(λ)强化学习的空间机械臂路径规划研究[J]. 宇航学报, 2019, 40(4): 435-443XU W, LU S. Analysis of space manipulator route planning based on Sarsa (λ) reinforcement learning[J]. Journal of Astronautics, 2019, 40(4): 435-443 (in Chinese) [6] WEI K, REN B Y. A method on dynamic path planning for robotic manipulator autonomous obstacle avoidance based on an improved RRT algorithm[J]. Sensors, 2018, 18(2): 571 doi: 10.3390/s18020571 [7] CAO X M, ZOU X J, JIA C Y, et al. RRT-based path planning for an intelligent litchi-picking manipulator[J]. Computers and Electronics in Agriculture, 2019, 156: 105-118 doi: 10.1016/j.compag.2018.10.031 [8] KAVRAKI L, LATOMBE J C. Randomized preprocessing of configuration for fast path planning[C]//Proceedings of 1994 IEEE International Conference on Robotics and Automation. San Diego, CA, USA: IEEE, 1994: 2138-2145 [9] AMATO N M, BAYAZIT O B, DALE L K, et al. OBPRM: an obstacle-based PRM for 3D workspaces[C]//Proceedings of the 3rd Workshop on the Algorithmic Foundations of Robotics on Robotics: the Algorithmic Perspective: the Algorithmic Perspective. Houston, Texas, USA: ACM, 1998: 156-168 [10] BOOR V, OVERMARS M H, VAN DER STAPPEN A F. The Gaussian sampling strategy for probabilistic roadmap planners[C]//Proceedings of 1999 IEEE International Conference on Robotics and Automation. Detroit, MI, USA: IEEE, 1999: 1018-1023 [11] HSU D, JIANG T T, REIF J, et al. The bridge test for sampling narrow passages with probabilistic roadmap planners[C]//Proceedings of IEEE 2013 International Conference on Robotics and Automation. Taipei, China: IEEE, 2003: 4420-4426 [12] 钟建冬, 苏剑波. 基于概率路标的机器人狭窄通道路径规划[J]. 控制与决策, 2010, 25(12): 1831-1836ZHONG J D, SU J B. Robot path planning in narrow passage based on probabilistic roadmap method[J]. Control and Decision, 2010, 25(12): 1831-1836 (in Chinese) [13] CHEN C, TIONG L K. Using queuing theory and simulated annealing to design the facility layout in an AGV-based modular manufacturing system[J]. International Journal of Production Research, 2019, 57(17): 5538-5555 doi: 10.1080/00207543.2018.1533654 [14] LIU H S, ZHANG Y, ZHU S Q. Novel inverse kinematic approaches for robot manipulators with Pieper-Criterion based geometry[J]. International Journal of Control, Automation and Systems, 2015, 13(5): 1242-1250 doi: 10.1007/s12555-013-0440-y [15] 曹其新, 孙明镜, 薛蔚, 等. 人机协作下机械臂动态避障与避奇异研究[J]. 华中科技大学学报(自然科学版), 2020, 48(1): 55-59,65CAO Q X, SUN M J, XUE W, et al. Research on avoidance of dynamic obstacle and singularity for manipulator in human-robot cooperation[J]. Journal of Huazhong University of Science and Technology (Nature Science Edition), 2020, 48(1): 55-59,65 (in Chinese) [16] 冷舒, 吴克, 居鹤华. 机械臂运动学建模及解算方法综述[J]. 宇航学报, 2019, 40(11): 1262-1273LENG S, WU K, JU H H. Overview of manipulator kinematics modeling and solving method[J]. Journal of Astronautics, 2019, 40(11): 1262-1273 (in Chinese) -









 点击查看大图
点击查看大图
计量
- 文章访问数: 125
- HTML全文浏览量: 55
- PDF下载量: 12
- 被引次数: 0
