




Gait Planning and Analysis for Six-wheel-legged Robot in Typical Unstructured Terrain Environment
-
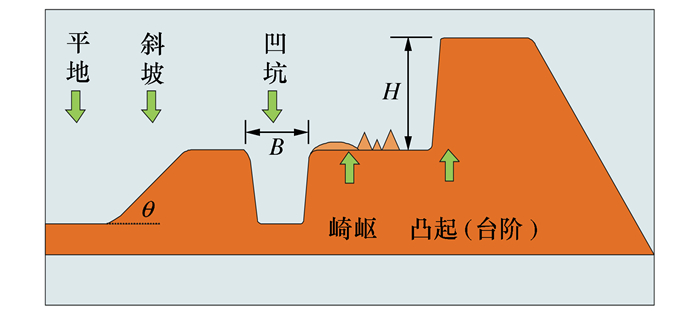
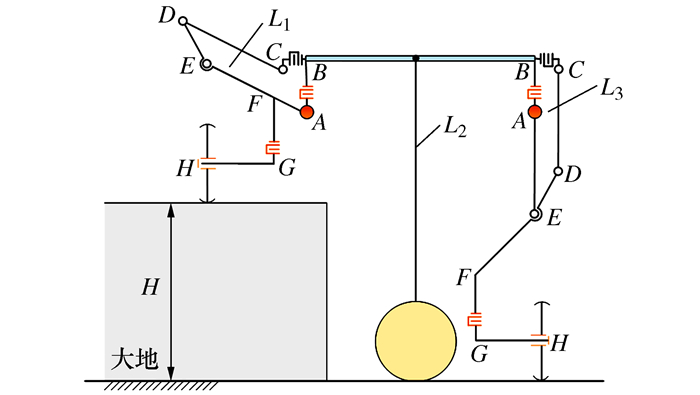
摘要: 针对非结构环境下六轮腿机器人地形通过性及高效行走问题,在已有并联六轮腿机器人模型的基础上,建立六足轮腿机器人运动学模型,分析机器人在凸起、凹坑、斜坡、崎岖等典型非结构地形下的移动能力,获得典型非结构地形机器人移动能力与机器人构型参数的相互影响关系。进而规划了六轮腿机器人典型大尺度非结构地形条件下的运动步态,通过ADAMS软件仿真验证了运动模型的正确性及运动步态的可行性;研究结果可为六轮腿机器人非结构地形条件下实现高效行走的控制策略提供借鉴。Abstract: To improve the terrain trafficability and walking efficiency of a six-wheel-legged robot in unstructured terrain environment, based on the existing parallel six-wheel-legged robot model, the kinematic model of the six-wheel-legged robot was established. The robot′s movement capability in typical unstructured terrain environments such as convexity, pit, slope and ruggedness is analyzed. The relationship between the robot′s movement capability in typical unstructured terrain environments and its configuration parameters was obtained. Furthermore, the gaits of the six-wheel-legged robot under the typical large-scale unstructured terrain environments are planned. The correctness of the motion model and the feasibility of the gait planning were simulated and verified with the ADAMS software. The results provide reference for the control strategies of the six-wheel-legged robot in unstructured terrain environments.
-
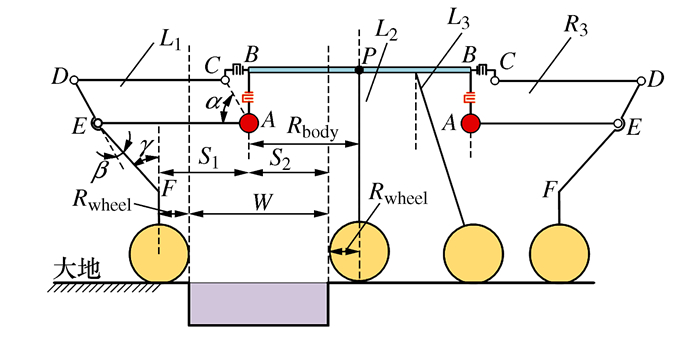
表 1 六轮腿机器人腿部几何参数
参数 数值 参数 数值 LAB 226 mm LGH 142 mm LAC 170 mm α 1.212 rad LAE 600 mm β 0.255 8 rad LEF 285 mm γ 0.614 7 rad LFG 152 mm Rwheel 142 mm  下载: 导出CSV
下载: 导出CSV
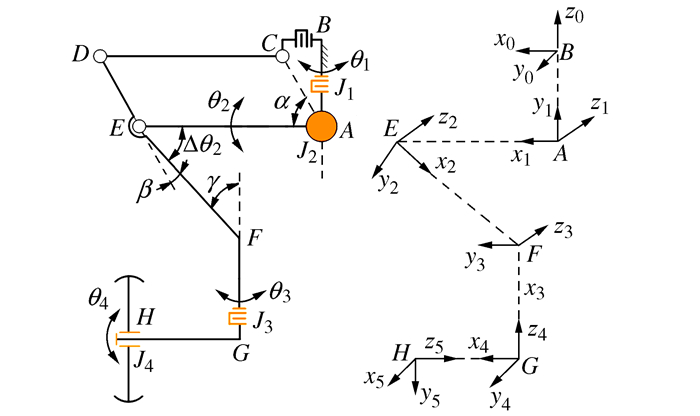
表 2 腿部机构坐标系
坐标系编号 原点位置 Z轴指向 X轴指向 0 B AB方向 水平向左 1 A 垂直向里 水平向左 2 E Z轴指向与1坐标系相同 EF方向 3 F Z轴指向与1坐标系相同 FG方向 4 G GF方向 水平向左 5 H HG方向 垂直向外
下载: 导出CSV
-
[1] BRUZZONE L, QUAGLIA G. Review article: locomotion systems for ground mobile robots in unstructured environments[J]. Mechanical Sciences, 2012, 3(2): 49-62 doi: 10.5194/ms-3-49-2012 [2] 韩亮亮, 陈萌, 张崇峰, 等. 月面服务机器人研究进展及发展设想[J]. 载人航天, 2018, 24(3): 313-320 https://www.cnki.com.cn/Article/CJFDTOTAL-ZRHT201803005.htmHAN L L, CHEN M, ZHANG C F, et al. Research progress and development conception of lunar service robot[J]. Manned Spaceflight, 2018, 24(3): 311-320 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZRHT201803005.htm [3] RUBIO F, VALERO F, LLOPIS-ALBERT C. A review of mobile robots: concepts, methods, theoretical framework, and applications[J]. International Journal of Advanced Robotic Systems, 2019, 16(2): 1-22 http://www.researchgate.net/publication/332469850_A_review_of_mobile_robots_Concepts_methods_theoretical_framework_and_applications [4] BENDER J A, SIMPSON E M, TIETZ B R, et al. Kinematic and behavioral evidence for a distinction between trotting and ambling gaits in the cockroach Blaberus discoidalis[J]. The Journal of Experimental Biology, 2011, 214(12): 2057-2064 doi: 10.1242/jeb.056481 [5] SUN J Y, YOU Y W, ZHAO X R, et al. Towards more possibilities: motion planning and control for hybrid locomotion of wheeled-legged robots[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 3723-3730 doi: 10.1109/LRA.2020.2979626 [6] 赵云伟, 耿德旭, 刘晓敏, 等. 气动柔性关节仿生六足机器人步态规划与运动性能研究[J]. 农业机械学报, 2018, 49(2): 385-394, 418 https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201802050.htmZHAO Y W, GENG D X, LIU X M, et al. Gait planning and kinematics of bionic hexapod robot based on pneumatic flexible joint[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2): 385-394, 418 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201802050.htm [7] 刘冬琛, 王军政, 汪首坤, 等. 一种基于并联6自由度结构的电动轮足机器人[J]. 机器人, 2019, 41(1): 65-74, 82 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201901008.htmLIU D C, WANG J Z, WANG S K, et al. An electric wheel-foot robot based on parallel 6-DOF structure[J]. Robot, 2019, 41(1): 65-74, 82 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201901008.htm [8] GAO H B, JIN M, LIU Y Q, et al. Turning gait planning and simulation validation of a hydraulic hexapod robot[C]//Proceedings of the IEEE International Conference on Fluid Power and Mechatronics. Harbin: IEEE, 2015: 842-847 [9] 刘逸群, 邓宗全, 刘振, 等. 液压驱动六足机器人一种低冲击运动规划方法[J]. 机械工程学报, 2015, 51(3): 10-17 https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201503003.htmLIU Y Q, DENG Z Q, LIU Z, et al. Low-impact motion planning method of hydraulically actuated hexapod robot[J]. Journal of Mechanical Engineering, 2015, 51(3): 10-17 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201503003.htm [10] SHIH T S, TSAI C S, HER I. Comparison of alternative gaits for multiped robots with severed legs[J]. International Journal of Advanced Robotic Systems, 2012, 9(4): 157 doi: 10.5772/52083 [11] WILCOX B H, LITWIN T, BIESIADECKI J, et al. ATHLETE: a cargo handling and manipulation robot for the moon[J]. Journal of Field Robotics, 2010, 24(5): 421-434 [12] 徐坤, 郑羿, 丁希仑. 六轮腿式机器人结构设计与运动模式分析[J]. 北京航空航天大学学报, 2016, 42(1): 59-71 https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201601010.htmXU K, ZHENG Y, DING X L. Structure design and motion mode analysis of a six wheel-legged robot[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(1): 59-71 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201601010.htm [13] 张程煜, 郭盛, 赵福群. 新型轮腿复合机器人的运动分析及步态研究[J]. 机械工程学报, 2019, 55(15): 145-153 https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201915017.htmZHANG C Y, GUO S, ZHAO F Q. Motion analysis and gait research of a new wheel-legged compound robot[J]. Journal of Mechanical Engineering, 2019, 55(15): 145-153 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201915017.htm [14] 田海波, 方宗德, 古玉锋. 轮腿式机器人越障动力学建模与影响因素分析[J]. 机器人, 2010, 32(3): 390-397 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201003016.htmTIAN H B, FANG Z D, GU Y F. Dynamic modeling for obstacle negotiation of wheel-legged robot and analysis on its influential factors[J]. Robot, 2010, 32(3): 390-397 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201003016.htm [15] XU K, WANG S K, YUE B K, et al. Obstacle-negotiation performance on challenging terrain for a parallel leg-wheeled robot[J]. Journal of Mechanical Science and Technology, 2020, 34(1): 377-386 doi: 10.1007/s12206-019-1237-6 [16] 陈志军. 并联六足机器人的行为表达与规划研究[D]. 上海: 上海交通大学, 2019CHEN Z J. Behavior expression and planning of six-parallel-legged robots[D]. Shanghai: Shanghai Jiaotong University, 2019 (in Chinese) [17] NIE C H, CORCHO X P, SPENKO M. Robots on the move: versatility and complexity in mobile robot locomotion[J]. IEEE Robotics & Automation Magazine, 2013, 20(4): 72-82 http://ieeexplore.ieee.org/xpl/articleDetails.jsp?arnumber=6582554 [18] 陈杰, 梁忠超, 刘冲, 等. 面向崎岖地形的六足机器人运动能力分析[J]. 东北大学学报, 2019, 40(6): 819-824 https://www.cnki.com.cn/Article/CJFDTOTAL-DBDX201906011.htmCHEN J, LIANG Z C, LIU C, et al. Moving capability analysis of a hexapod robot over rugged terrains[J]. Journal of Northeastern University, 2019, 40(6): 819-824 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-DBDX201906011.htm [19] TIAN Y, GAO F. Efficient motion generation for a six-legged robot walking on irregular terrain via integrated foothold selection and optimization-based whole-body planning[J]. Robotica, 2018, 36(3): 333-352 http://www.zhangqiaokeyan.com/academic-journal-foreign_other_thesis/0204111363453.html [20] 丁希仑, 王志英, ROVETTA A. 六边形对称分布六腿机器人的典型步态及其运动性能分析[J]. 机器人, 2010, 32(6): 759-765 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201006011.htmDING X L, WANG Z Y, ROVETTA A. Typical gaits and motion analysis of a hexagonal symmetrical hexapod robot[J]. Robot, 2010, 32(6): 759-765 (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201006011.htm -







 点击查看大图
点击查看大图
图(21) / 表(2)
计量
- 文章访问数: 122
- HTML全文浏览量: 42
- PDF下载量: 21
- 被引次数: 0
