




A Composite Control of Neural Approximation Inverse and Iterative Learning for Rectifying Separator Film Deviation in Lithium Battery Laminated Machine
-
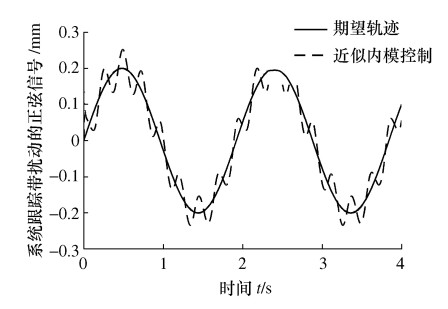
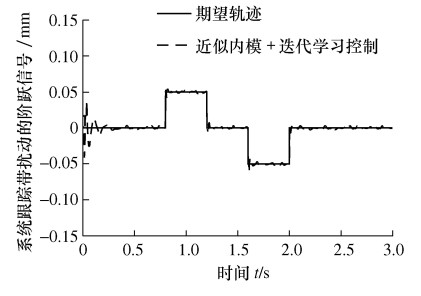
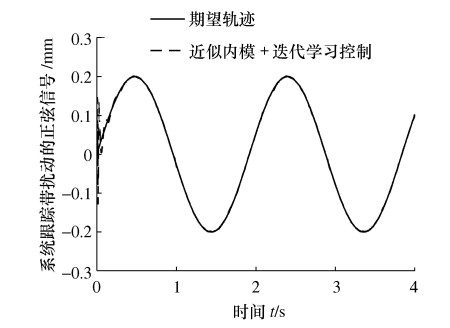
摘要: 为了解决叠片过程中隔膜对齐度较差的问题,采用神经近似内模和迭代学习控制相结合的方法设计控制器来改进隔膜的纠偏效果,提出一种神经网络近似内模及迭代学习复合控制的隔膜纠偏控制算法。首先针对影响隔膜对齐度的复杂特性导致难以用物理数学模型去描述纠偏过程的问题,采用神经网络的优秀的非线性逼近能力建立纠偏系统的神经网络模型。其次为了提升系统的鲁棒性以及避免系统模型的非仿射非线性特性,采用一种神经近似内模对纠偏系统进行控制,仿真表明神经近似内模对纠偏系统能取得较好的控制效果,但是对周期性扰动的抑制能力有限。然而在锂电池叠片过程中,速度和张力的规律性变化会对隔膜偏移误差产生周期性的干扰。最后将迭代学习控制引入到神经近似内模控制中以应对纠偏系统的周期性扰动,仿真表明引入迭代学习控制后,纠偏系统的周期性扰动得到有效地抑制。试验结果表明所提出的纠偏控制算法可以有效地提升锂电池叠片机放卷系统的隔膜对齐度。Abstract: Aiming at the problem that the separator film has a poor alignment in the manufacturing process of square lithium batteries using the laminated machine, a novel composite control algorithm is proposed by combining neural network approximate internal model and iterative learning control. Firstly, because the poor alignment is caused by many unknown factors in the manufacturing process of laminated lithium battery, it is impossible to describe the process using a physical mathematical model. A neural network is built to describe the process. Then, in order to enhance the robustness and avoid the non-affine nonlinearity, a neural approximate inverse control is applied to control the process, and the simulation results show that a good performance is obtained in the absence of periodic perturbations. However, the periodic changes of the separator film velocity and tension lead to bring about a periodic disturbance in the process. Finally, the iterative learning control is used to deal with periodic disturbances in the batch manufacturing process of lithium batteries. Experiments demonstrate the composite control algorithm can effectively improve the alignment in the manufacturing process of square lithium using the laminated machine.
-
[1] 高志方.锂动力电池卷绕机隔膜纠偏系统设计[J].电子工业专用设备, 2015, 44(4):19-21, 25 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dzgyzysb201504004Gao Z F. Design of septum correction control system on li-ion power battery winding machine[J]. Equipment for Electronic Products Manufacturing, 2015, 44(4):19-21, 25(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dzgyzysb201504004 [2] 陈德传, 陶宏斌.带材收卷过程中的一种新型纠偏控制系统[J].杭州电子科技大学学报, 2008, 28(2):74-77 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hzdzgyxyxb200802019Chen D C, Tao H B. A new deviation control system for strip winding process[J]. Journal of Hangzhou Dianzi University, 2008, 28(2):74-77(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hzdzgyxyxb200802019 [3] Sun G H, Zhu Z H. Fractional order tension control for stable and fast tethered satellite retrieval[J]. Acta Astronautica, 2014, 104(1):304-312 doi: 10.1016/j.actaastro.2014.08.012 [4] Yang H K, Engelen J B C, Häberle W, et al. Lateral friction behavior of a thin, tensioned tape wrapped over a grooved roller:experiments and theory[J]. Journal of Tribology, 2017, 139(2):021605 doi: 10.1115/1.4033566 [5] Zhao P B, Shi Y Y, Huang J. Dynamics modeling and deviation control of the composites winding system[J]. Mechatronics, 2017, 48:12-29 doi: 10.1016/j.mechatronics.2017.10.004 [6] Yoon J S, Choi J H, Suzuki T, et al. Numerical and experimental analysis for the skew phenomena on the flexible belt and roller contact systems[J]. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2012, 226(5):1365-1381 doi: 10.1177/0954406211420610 [7] Han F L, He R B, Yan H Z, et al. Lateral motion of the endless flat belt in a two-pulley belt system[J]. Advances in Mechanical Engineering, 2017, 9(4):1-13 http://www.researchgate.net/publication/315981019_Lateral_motion_of_the_endless_flat_belt_in_a_two-pulley_belt_system [8] Wang H, Logghe D, Miskin D. Physical modelling and control of lateral web position for wallpaper making processes[J]. Control Engineering Practice, 2005, 13(4):401-412 doi: 10.1016/j.conengprac.2004.02.014 [9] Torres E O C, Pagilla P R. Spatially dependent transfer functions for web lateral dynamics in roll-to-roll manufacturing[J]. Journal of Dynamic Systems, Measurement, and Control, 2018, 140(11):111011 doi: 10.1115/1.4040216 [10] Chen J K, Yin Z P, Xiong Y L, et al. A hybrid control method of tension and position for a discontinuous web transport system[C]//Roceedings of the 2009 International Conference on Information and Automation. Zhuhai, China: IEEE, 2009 [11] Kim K W, Lee J W, Yoo W S. Effect of gravity and tangential air resistance on unwinding cable[J]. Nonlinear Dynamics, 2012, 70(1):67-87 doi: 10.1007/s11071-012-0431-1 [12] Lu J Y, Cao Z X, Zhang R D, et al. Nonlinear monotonically convergent iterative learning control for batch processes[J]. IEEE Transactions on Industrial Electronics, 2018, 65(7):5826-5836 doi: 10.1109/TIE.2017.2782201 [13] Tao H F, Paszke W, Rogers E, et al. Iterative learning fault-tolerant control for differential time-delay batch processes in finite frequency domains[J]. Journal of Process control, 2017, 56:112-128 doi: 10.1016/j.jprocont.2016.12.007 [14] Wang L M, Zhu C J, Yu J X, et al. Fuzzy iterative learning control for batch processes with interval time-varying delays[J]. Industrial & Engineering Chemistry Research, 2017, 56(14):3993-4001 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=86c96ed03197fd52e2e198b9a734c549 [15] Jia L, Han C, Chiu M S. Dynamic R-parameter based integrated model predictive iterative learning control for batch processes[J]. Journal of Process Control, 2017, 49:26-35 doi: 10.1016/j.jprocont.2016.11.003 [16] Zhu Q, Song F Z, Xu J X, et al. An internal model based iterative learning control for wafer scanner systems[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(5):2073-2084 doi: 10.1109/TMECH.2019.2929565 [17] Deng H, Li H X. A novel neural approximate inverse control for unknown nonlinear discrete dynamical systems[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2005, 35(1):115-123 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=acddfe710e8c15fc69b1a1dc3a083d4f [18] Li H X, Deng H. An approximate internal model-based neural control for unknown nonlinear discrete processes[J]. IEEE Transactions on Neural Networks, 2006, 17(3):659-70 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=06e66569449533a9219a0e0ecad35180 [19] Bozic M, Igic J, Krcmar I. An adaptive neural IMC design of nonlinear dynamic processes[C]//Proceedings of the 15th International Symposium INFOTEH-JAHORINA 2016. 2016: 752-757 [20] 杨开平, 史耀耀, 何晓东, 等.复合材料布带缠绕智能纠偏控制技术[J].航空学报, 2011, 32(7):1318-1325 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hkxb201107019Yang K P, Shi Y Y, He X D, et al. Controlling technology of intelligent position correcting in winding process of composites[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(7):1318-1325(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hkxb201107019 [21] Shin K H, Kwon S O. The effect of tension on the lateral dynamics and control of a moving web[J]. IEEE Transactions on Industry Applications, 2007, 43(2):403-411 doi: 10.1109/TIA.2006.889742 [22] 刘金琨.机器人控制系统的设计与MATLAB仿真[M].北京:清华大学出版社, 2008Liu J K. Robot control system design and matlab simulation[M]. Beijing:Tsinghua University Press, 2008(in Chinese) [23] Ding W H, Deng H, Xia Y M, et al. Tracking control of electro-hydraulic servo multi-closed-chain mechanisms with the use of an approximate nonlinear internal model[J]. Control Engineering Practice, 2017, 58:225-241 doi: 10.1016/j.conengprac.2016.11.003 [24] 韩磊.锂电池叠片机张力与纠偏控制技术研究[D].哈尔滨: 哈尔滨工业大学, 2017Han L. Research on tension and deviation rectification control technology of lithium battery lamination machine[D].Harbin: Harbin Institute of Technology, 2017(in Chinese) -

 下载:
下载:



 点击查看大图
点击查看大图
图(22)
计量
- 文章访问数: 264
- HTML全文浏览量: 97
- PDF下载量: 14
- 被引次数: 0
