




Mechanism Design and Kinematics Analysis of Elbow Joint Rehabilitation Robot
-
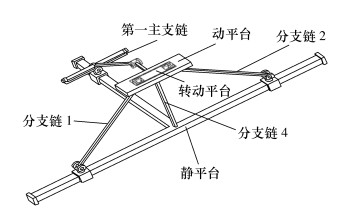
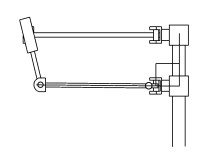
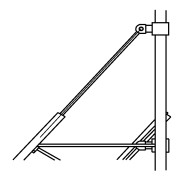
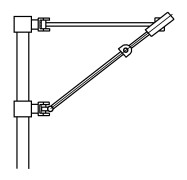
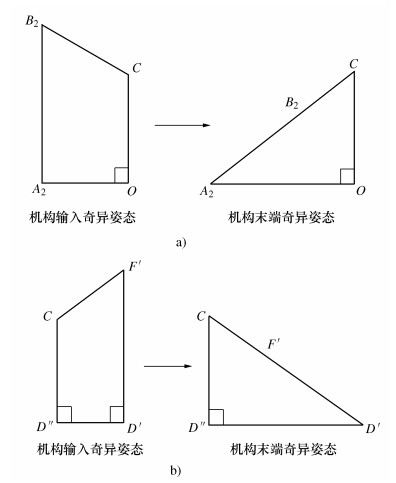
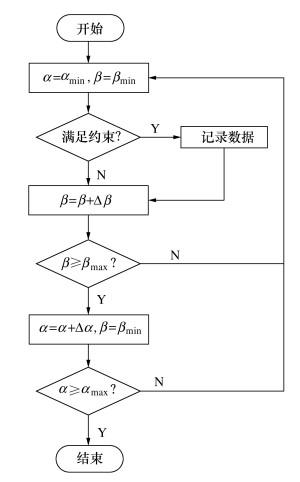
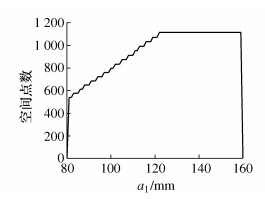
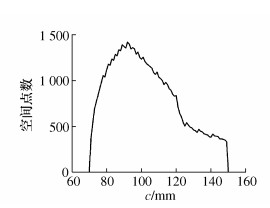
摘要: 现有研究中针对肘关节康复运动的机构设计几乎均采用串联机构作为机构本体,普遍存在精度低、运动惯性大、容易造成肘部肌肉的损伤等问题。鉴于此,本文设计了一种可实现肘关节二自由度康复运动的(2-PRR-S)R-PRCR并联机器人机构;并使用旋量理论验证了机构的自由度特性。利用空间几何分析法推导出机构位置逆解与位置正解表达式;进而给出了机构的雅克比矩阵,然后结合雅克比矩阵分析了机构的奇异位形。依据机构的约束条件,确定了机构的初始姿态工作空间;以最大化姿态工作空间为优化目标,并采用遗产算法对机构进行了尺度优化。基于人体肌肉运动机理,分析了肘关节康复运动时的训练效果,验证了所设计的并联机构的适用性,为后续肘关节康复训练策略的研究奠定了基础。Abstract: In the existing researches, the mechanism designs of elbow rehabilitation exercise almost use series mechanism as the body of the mechanism. There are many problems, such as low accuracy, large inertia, easy to cause injury to elbow muscles, and so on. In view of this, a (2-PRR-S)R-PRCR parallel robot mechanism is designed, which can realize 2 degrees of freedom rehabilitation movement of elbow joint, and verify the degree-of-freedom characteristics of the mechanism by using the screw theory. The inverse and forward position solutions of the mechanism are derived by using spatial geometric analysis method, and then the Jacobian matrix of the mechanism is given, and the singularity of the mechanism is analyzed by combining the Jacobian matrix. According to the constraints of the mechanism, the initial pose workspace of the mechanism is determined, and the goal of optimization is to maximize the pose workspace, and the mechanism is optimized by genetic algorithm. Based on the mechanism of human muscle movement, the training effect of elbow rehabilitation exercise is analyzed, and the applicability of the designed parallel mechanism is verified, which lays a foundation for the follow-up study of elbow rehabilitation training strategy.
-
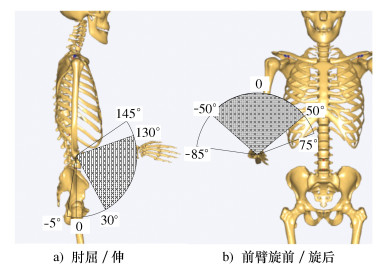
表 1 肘关节运动角度范围
肘运动 肘屈/伸 前臂旋前/旋后 最大安全角度范围 [-5°, 145°]/150° [-85°, 75°]/160° 日常功能运动角度范围 [30°, 130°]/100° [-50°, 50°]/100°  下载: 导出CSV
下载: 导出CSV
-
[1] [1]周宝玉, 孙启良, 桂德超, 等.脑卒中患者早期康复的预后研究[J].中国康复医学杂志, 2000, 15(5):269-271 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkfyxzz200005003Zhou B Y, Sun Q L, Gui D C, et al. A study on the prognosis of patients with stroke during early rehabilitation[J]. Chinese Journal of Rehabilitation Medicine, 2000, 15(5):269-271(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkfyxzz200005003 [2] 韩国芹.急性脑卒中偏瘫患者康复训练临床分析[J].临床医学, 2009, 29(11):98-99 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=lcyx200911062Han G Q. Clinical Analysis of rehabilitation training for hemiplegic patients with acute stroke[J]. Clinical Medicine, 2009, 29(11):98-99(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=lcyx200911062 [3] 陈红霞, 杨志敬, 潘锐焕, 等.中西医结合康复方案对脑卒中后偏瘫患者运动功能、日常生活活动能力和生活质量的影响[J].中国中西医结合杂志, 2016, 36(4):395-398 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zxyjh201604003Chen H X, Yang Z J, Pan R H, et al. Effect of Comprehensive protocol of integrative medicine on motor function, activity of daily living and quality of life in hemiplegia patients after stroke[J] Chinese Journal of Integrated Traditional and Western Medicine, 2016, 36(4):395-398(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zxyjh201604003 [4] 杨改清, 董志强, 杜金刚.上肢康复机器人治疗脑卒中后上肢运动功能障碍新进展[J].中国康复, 2014, 29(6):462-464 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkf201406026Yang G Q, Dong Z Q, Du J G. Recent progress of upper limb rehabilitation robot in the treatment of upper limb motor dysfunction after stroke[J]. Chinese Journal of Rehabilitation, 2014, 29(6):462-464(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkf201406026 [5] 王丽, 张秀峰, 马岩, 等.脑卒中患者上肢康复机器人及评价方法综述[J].北京生物医学工程, 2015, 34(5):526-532 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bjswyxgc201505018Wang L, Zhang X F, Ma Y, et al. Summary of rehabilitation robot for upper limbs and evaluation methods for stroke patients[J]. Beijing Biomedical Engineering, 2015, 34(5):526-532(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bjswyxgc201505018 [6] Song Z B, Guo S X. Development of a new compliant exoskeleton device for elbow joint rehabilitation[C]//Proceedings of 2011 IEEE/ICME International Conference on Complex Medical Engineering. Harbin, China: IEEE, 2011: 647--651 [7] Cui B Y, Jin Z L. Analysis of structural parameter and design of elbow joint rehabilitation parallel robot[C]//Proceedings of 2013 International Conference on Bio-Medical Materials and Engineering. Hong Kong, China: Intelligent Information Technology Application Society, 2013: 6-6 [8] Zhang S Y, Guo S X, Pang M Y, et al. Mechanical design and control method for SEA and VSA-based exoskeleton devices for elbow joint rehabilitation[J]. Neuroscience and Biomedical Engineering, 2014, 2(3):142-147 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fc1d6eff1d98014f0f4a9a367b3120b5 [9] Kiguchi K, Kariga S, Niwa T, et al. Design of an exoskeletal robot for human elbow motion support[C]//Proceedings of 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems. Takamatsu, Japan: IEEE, 2000: 383-388 [10] Rahman M H, Ouimet T K, Saad M, et al. Development and control of a wearable robot for rehabilitation of elbow and shoulder joint movements[C]//Proceedings of the 36th Annual Conference on IEEE Industrial Electronics Society. Glendale, AZ, USA: IEEE, 2010: 1506-1511 [11] Morizono T. Design and preliminary evaluation of a wearable elbow joint[C]//Proceedings of 2012 IEEE/SICE International Symposium on System Integration. Fukuoka, Japan: IEEE, 2012: 13-18 [12] Copaci D, Flores A, Rueda F, et al. Wearable elbow exoskeleton actuated with shape memory alloy[M]//Ibáňez J, González-Vargas J, Azorán J M, et al. Converging Clinical and Engineering Research on Neurorehabilitation Ⅱ. Cham: Springer, 2016: 477-481 [13] Ren L, Qian Z H, Ren L Q. Biomechanics of musculoskeletal system and its biomimetic implications:a review[J]. Journal of Bionic Engineering, 2014, 11(2):159-175 doi: 10.1016/S1672-6529(14)60033-0 [14] 叶伟, 杨臻, 李秦川.一种远中心并联机构运动学与性能分析[J].机械工程学报, 2019, 55(5):65-73 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201905009Ye W, Yang Z, Li Q C. Kinematics and performance analysis of a parallel manipulator with remote center of motion[J]. Journal of Mechanical Engineering, 2019, 55(5):65-73(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201905009 [15] 郭宗和, 孙术华, 郝秀清, 等.3-PUU三维平动并联机器人的位置分析及其仿真[J].中国机械工程, 2006, 17(17):1787-1789 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjxgc200617007Guo Z H, Sun S H, He X Q, et al. Position analysis and simulation of 3-PUU translational parallel manipulator[J]. China Mechanical Engineering, 2006, 17(17):1787-1789(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjxgc200617007 [16] 刘存生, 韩先国.多种方法分析二自由度球面并联机构位置正反解[J].机械制造与自动化, 2018, 47(1):19-21, 29 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxzzyzdh201801005Liu C S, Han X G. A variety of methods of forward and inverse position analysis of 2-DOF spherical parallel mechanism[J]. Machine Building & Automation, 2018, 47(1):19-21, 29(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxzzyzdh201801005 [17] 叶伟, 方跃法, 郭盛, 等.一种新型并联机构的运动分岔特性及运动学分析[J].机械工程学报, 2013, 49(13):8-16 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201313002Ye W, Fang Y F, Guo S, et al. Bifurcated motion and kinematics of novel parallel mechanism[J]. Journal of Mechanical Engineering, 2013, 49(13):8-16(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201313002 [18] 刘振坤, 罗玉峰, 石志新, 等.基于工作空间的3T1R并联机构尺寸优化设计[J].机械传动, 2018, 42(10):77-82 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxcd201810015Liu Z K, Luo Y F, Shi Z X, et al. Size optimization design of 3T1R parallel mechanism based on workspace[J]. Journal of Mechanical Transmission, 2018, 42(10):77-82(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxcd201810015 [19] Piccin O, Bayle B, Maurin B, et al. Kinematic modeling of a 5-DOF parallel mechanism for semi-spherical workspace[J]. Mechanism and Machine Theory, 2009, 44(8):1485-1496 doi: 10.1016/j.mechmachtheory.2008.11.012 [20] Bhide R P, Solomons C, Devsahayam S, et al. Exercise and gait training in persons with paraplegia and its effect on muscle properties[J]. Journal of Back and Musculoskeletal Rehabilitation, 2015, 28(4):739-747 doi: 10.3233/BMR-140577 [21] 单丽君, 胡忠安.基于AnyBody的髋关节康复训练肌肉力的分析[J].大连交通大学学报, 2014, 35(1):50-52 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dltdxyxb201401012Shan L J, Hu Z A. Muscle force analysis of hip rehabilitation training based on AnyBody[J]. Journal of Dalian Jiaotong University, 2014, 35(1):50-52(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dltdxyxb201401012 [22] 项忠霞, 赵明, 高飞, 等.一种外骨骼式康复机器人训练效果仿真[J].天津大学学报, 2016, 49(7):695-701 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=tianjdxxb201607006Xiang Z X, Zhao M, Gao F, et al. Simulation on the training effect of an exoskeletal rehabilitation robot[J]. Journal of Tianjin University, 2016, 49(7):695-701(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=tianjdxxb201607006 [23] 李兆波, 陶庆, 康金胜, 等.基于动作捕捉技术的人体上肢运动舒适性评价[J].工程设计学报, 2018, 25(3):338-345, 359 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gcsj201803014Li Z B, Tao Q, Kang J S, et al. Evaluation of human upper limb motion comfort based on motion capture technique[J]. Chinese Journal of Engineering Design, 2018, 25(3):338-345, 359(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gcsj201803014 [24] Johns G, Morin E, Hashtrudi-Zaad K. Force modelling of upper limb biomechanics using ensemble fast orthogonal search on high-density electromyography[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2016, 24(10):1041-1050 doi: 10.1109/TNSRE.2016.2515087 -






 点击查看大图
点击查看大图
图(21) / 表(5)
计量
- 文章访问数: 337
- HTML全文浏览量: 124
- PDF下载量: 53
- 被引次数: 0
