




Designing Heavy-duty Transportation Manipulator in Dustless and Constant Temperature Workshop
-
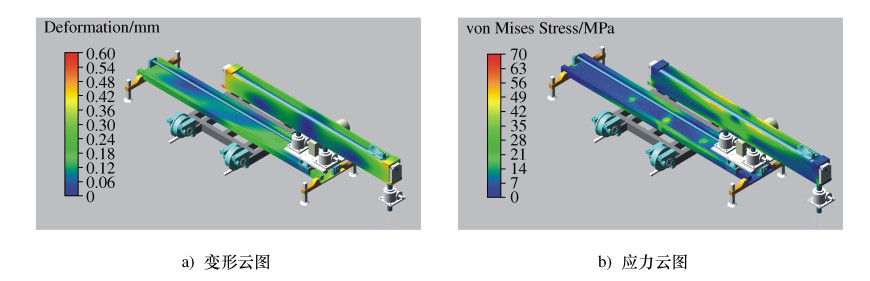
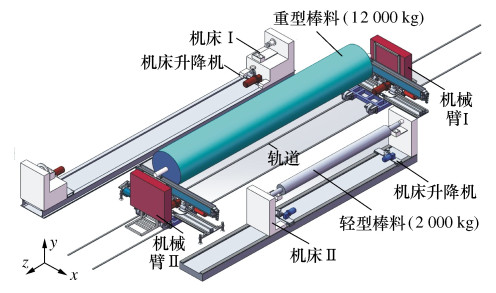
摘要: 针对某企业将开放式车间升级为封闭式恒温无尘化车间,设计了一种用于恒温无尘车间的大型棒料重载运输机械臂,满足棒料运输的准确性及运行稳定性要求。首先,利用SolidWorks和ADAMS软件构造虚拟样机,其次,通过建立刚柔耦合模型并仿真,以确认模型的有效性,并获得应力和变形云图;最后,对机械臂进行结构轻量化设计,减轻其质量,并促使其运转更加灵活流畅。仿真结果表明,优化后的重载机械臂最大变形由0.532 mm降至0.409 mm,最大应力由480.33 MPa降至237.67 MPa,降幅高达50.5%,A级机械臂减重7.6%。Abstract: To upgrade a workshop from open to closed constant temperature and to be dust-free, a large heavy-duty bar material transportation manipulator is designed for highly accurate and stable transportation. Firstly, the computer simulation is conducted with SolidWorks and ADAMS software. Secondly, a rigid-flexible coupling model is established and simulated to confirm the validity of the model and obtain the stress and deformation cloud maps. Finally, the manipulator is optimized with a lightweight design to reduce its weight, making it more flexible and smooth. The simulation results show that the maximum deformation of the optimized manipulator decreases from 0.532 mm to 0.409 mm and that its maximum stress decreases from 480.33 MPa to 237.67 MPa, decreasing by 50.5%. The weight reduction of the optimized A-level manipulator is 7.6%.
-
Key words:
- heavy-duty transportation manipulator /
- computer simulation /
- optimization
-
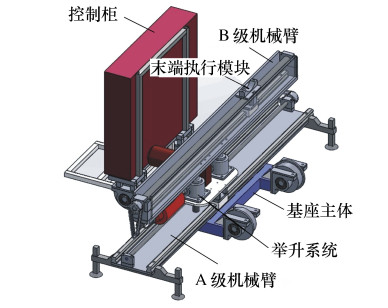
表 1 机械臂的机械结构
名称 主要组成 作用和特点 基座主体 行走轮、车身、控制柜 1)将机械臂以及棒料从外部区域移动到工作区域。
2)为整个重载机械臂提供稳固的支撑平台。举升系统 机械臂升降模块、机床协同升降模块 1)用于举升上层机械臂到指定位置。
2)两个机械臂同时举升时, 要保证同步。轴向伸缩系统 两段式伸缩机械臂A和B、传动模块、末端执行模块 1)将棒料送到机床指定位置, 工作位移较长。
2)棒料质量大, 机械臂臂杆长, 所以在送料过程中需要考虑振动和挠曲变形。 下载: 导出CSV
下载: 导出CSV
表 2 机械臂优化前后Top-5应力集中点的位置
热点 应力/ MPa 节点 坐标X/mm 坐标Y/mm 坐标Z/mm 优化前 1 480.33 4 211 2 234.9 -542.1 532.9 2 463.82 4 151 -430.6 -542.1 532.9 3 452.34 13 028 -420.1 -548.3 534.1 4 324.17 13 027 -422.7 -547.0 531.6 5 302.76 10 413 -421.0 -542.1 532.9 优化后 1 237.67 9 791 918.4 -1 036.1 423.4 2 223.08 9 785 898.4 -1 036.1 423.4 3 122.82 9 787 918.4 -1 036.1 383.4 4 111.79 9 792 908.6 -1 036.1 443.4 5 101.36 9 781 898.4 -1 036.1 383.4
下载: 导出CSV
表 3 各级机械臂优化前后参数对比与减重百分比
机械臂 优化前 优化后 减重百分比/% 质量/ kg 最大变形/mm 质量/ kg 最大变形/mm A级 301.5 0.532 278.5 0.409 7.6 B级 347.8 334.7 3.8
下载: 导出CSV
-
[1] 李连鹏, 解仑, 刘振宗, 等.基于人机交互的重载机械臂控制方法[J].机器人, 2018, 40(4):525-533 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr201804016Li L P, Xie L, Liu Z Z, et al. A control method for heavy load manipulator based on man-machine interaction[J]. Robot, 2018, 40(4):525-533(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr201804016 [2] 周鑫林, 李光, 肖凡.柔性机械臂的状态观测及跟踪控制研究[J].机械科学与技术, 2018, 37(7):1027-1033 doi: 10.13433/j.cnki.1003-8728.2018.0705Zhou X L, Li G, Xiao F. Research on state observation and tracking control of flexible manipulators[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(7):1027-1033(in Chinese) doi: 10.13433/j.cnki.1003-8728.2018.0705 [3] 赵亮, 胡振东.轴向运动功能梯度悬臂梁动力学分析[J].振动与冲击, 2016, 35(2):124-128 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zdycj201602020Zhao L, Hu Z D. Dynamic analysis of an axially translating functionally graded cantilever beam[J]. Journal of Vibration and Shock, 2016, 35(2):124-128(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zdycj201602020 [4] 刘士明.工程起重机伸缩臂系统结构稳定性及复合运动动力学研究[D].哈尔滨: 哈尔滨工业大学, 2013Liu S M. Research on structural stability and complex motion dynamic of telescopic boom system in construction crane[D]. Harbin: Harbin Institute of Technology, 2013(in Chinese) [5] 郑彤, 章定国, 廖连芳, 等.航空发动机叶片刚柔耦合动力学分析[J].机械工程学报, 2014, 50(23):42-49 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201423008Zheng T, Zhang D G, Liao L F, et al. Rigid-flexible coupling dynamic analysis of aero-engine blades[J]. Journal of Mechanical Engineering, 2014, 50(23):42-49(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201423008 [6] 王相兵, 童水光.基于刚柔耦合的液压挖掘机机械臂非线性动力学研究[J].振动与冲击, 2014, 33(1):63-70 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zdycj201401011Wang X B, Tong S G. Nonlinear dynamical behavior analysis on rigid-flexible coupling mechanical arm of hydraulic excavator[J]. Journal of Vibration and Shock, 2014, 33(1):63-70(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zdycj201401011 [7] Grinek A V, Rybina A V, Boychuk I P, et al. Modeling and analysis of dynamic characteristics of carrier system of machining center in MSC. Adams[J]. IOP Conference Series:Materials Science and Engineering, 2018, 327:022088 doi: 10.1088/1757-899X/327/2/022088 [8] 赵丽娟, 李明昊.掘进机回转台螺栓组多目标优化设计[J].机械科学与技术, 2017, 36(7):1048-1054 doi: 10.13433/j.cnki.1003-8728.2017.0711Zhao L J, Li M H. Multiple targets optimized design of roadheader gyration platform bolt-set based on PSO[J]. Mechanical Science and Technology for Aerospace Engineering, 2017, 36(7):1048-1054(in Chinese) doi: 10.13433/j.cnki.1003-8728.2017.0711 [9] Li J Q, Xie D, Feng Z X. Co-simulation on walking hydraulic system of tandem roller based on AMEsim and ADAMS[J]. Applied Mechanics and Materials, 2015, 727-728:435-438 doi: 10.4028/www.scientific.net/AMM.727-728.435 [10] Xu J L, Song W. Analysis and research on vehicle handling stability of the trapezoidal link rear independent suspension by ADAMS/Car[J]. Applied Mechanics and Materials, 2016, 851:352-358 doi: 10.4028/www.scientific.net/AMM.851.352 [11] 李鸿飞, 黄松和.基于刚柔耦合的凿岩台车钻臂运动精度分析[J].矿山机械, 2018, 46(1):7-11 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ksjx201801002Li H F, Huang S H. Analysis on motion precision of drilling arms of rock-drilling jumbo based on rigid-flexible coupling[J]. Mining & Processing Equipment, 2018, 46(1):7-11(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ksjx201801002 [12] Hroncová D, Šarga P. Kinematics analysis of the crank mechanism conveyor using MSC ADAMS[J]. Applied Mechanics and Materials, 2015, 816:140-149 doi: 10.4028/www.scientific.net/AMM.816.140 [13] Zhao Y F, Sha L, Zhu Y. Dynamic simulation analysis of the crane hoisting process based on ADAMS[J]. Advanced Materials Research, 2014, 940:132-135 doi: 10.4028/www.scientific.net/AMR.940.132 [14] 毕厚煌, 何家宁, 谭蓉, 等.基于ABAQUS和ADAMS的悬臂式起重机结构设计与刚柔耦合动力学分析[J].机械设计, 2017, 34(11):16-21 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxsj201711003Bi H H, He J N, Tan R, et al. Mechanism design and rigid-flexible coupling dynamics analysis for cantilever crane based on ABAQUS[J]. Journal of Machine Design, 2017, 34(11):16-21(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxsj201711003 [15] Kunpeng N, Dongbo L, Fei H, et al. Research on the structural optimization design of ER300 palletizing robot[J]. The Open Automation and Control Systems Journal, 2015, 7(1):1405-1414 http://www.researchgate.net/publication/283475306_Research_on_the_Structural_Optimization_Design_of_ER300_Palletizing_Robot -




 点击查看大图
点击查看大图
图(10) / 表(3)
计量
- 文章访问数: 333
- HTML全文浏览量: 63
- PDF下载量: 15
- 被引次数: 0
