




A Method for Calibrating Parameters of Robot Airbag Polishing Tool
-
摘要: 针对工业机器人气囊抛光工具参数标定困难的问题,提出一种简便有效、易于操作的工具坐标系参数标定新方法。首先介绍了工具坐标系的标定原理,建立了机器人抛光系统的各个坐标系,然后根据工件转台与机器人的位置关系,提出一种只依靠机器人系统本身的工具参数标定算法,采用姿态转换及简单几何数学的计算即可实现。最后,以ER20D-C10型机器人为试验平台,对气囊抛光工具的参数进行标定并与传统标定方法对比,结果表明该方法是一种易操作、高精度的工具参数标定方法,满足机器人气囊抛光的技术要求。Abstract: Because it is difficult to calibrate the parameters of the airbag polishing tool of an industrial robot, a new method for calibrating the parameters of the tool's coordinate system is presented. This paper first introduces the calibration principles of the coordinate system, establishes each coordinate system. Then according to the position relationship between workpiece turntable and robot, it puts forward the tool's parameter calibration algorithm that depends on only the robot system itself and can be realized by attitude transformation and simple geometric mathematical calculation. Finally, the ER20D-C10 robot is used as the test platform to calibrate the parameters of the airbag polishing tool and to compare our calibration method with the traditional calibration method. The results show that our calibration method is easy to use and highly precise, thus meeting the technical requirements for robot airbag polishing.
-
Key words:
- industrial robot /
- airbag polishing tool /
- coordinate system /
- parameter calibration
-
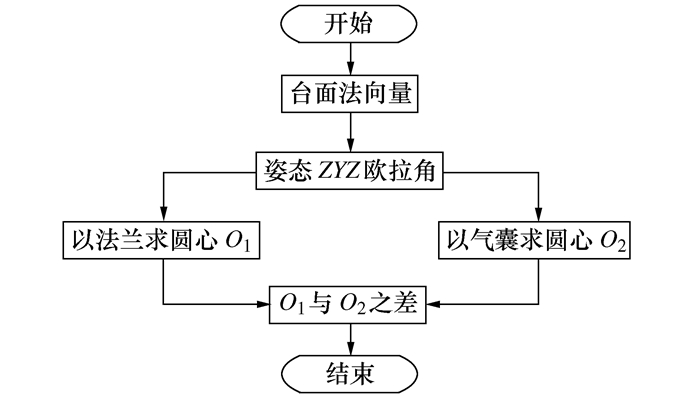
表 1 法向量及ZYZ欧拉角的转换
坐标 M1 M2 M3 法向量 x 1 136.802 1 286.178 1 305.975 73.651 y -26.634 103.484 -125.119 89.696 z 591.539 591.580 592.074 19 236.949 ZYZ欧拉角 a=-129.390, b=179.654, c=50.609  下载: 导出CSV
下载: 导出CSV
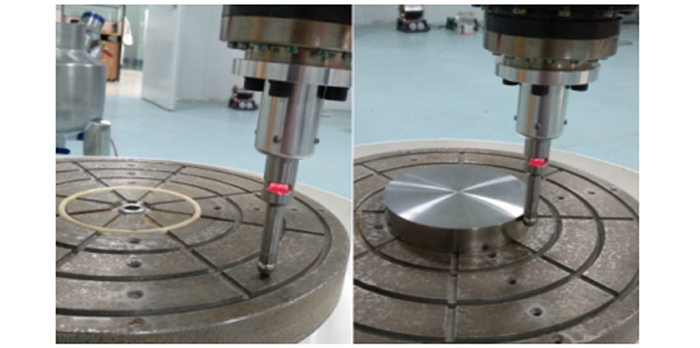
表 2 工具参数的计算数据
坐标 寻边器 气囊抛光工具 P1 P2 P3 O1 G1 G2 G3 O2 x 1 197.516 1 281.976 1 281.595 1 257.444 1 234.855 1 119.447 1 120.223 1 164.704 y -14.403 43.275 -66.404 -11.480 -11.393 47.569 -60.762 -6.275
下载: 导出CSV
-
[1] 袁钰坤.我国工业机器人发展及趋势[J].中国新技术新产品, 2017, (20):106-107 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgxjsxcpjx201720066Yuan Y K. Development and trend of industrial robot in China[J]. China New Technologies and New Products, 2017, (20):106-107(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgxjsxcpjx201720066 [2] 陈探.工业机器人技术的发展与应用综述[J].内燃机与配件, 2018, (1):193-194 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=0120180500160431Chen T. Review on the development and application of industrial robot technology[J]. Internal Combustion Engine & Parts, 2018, (1):193-194(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=0120180500160431 [3] Łukasik Z, Kuśmińska-Fijałkowska A, Kozyra J, et al. The problem of power supply for station with industrial robot in an automated welding process[J]. Electrical Engineering, 2018, 100(3):1365-1377 doi: 10.1007/s00202-017-0591-6 [4] Karabegović I, Mirza R. Automation of the welding process by use of industrial robots[C]//Proceedings of 2018 International Conference ″New Technologies, Development and Applications″. Cham: Springer, 2018: 3-17 [5] Zhou B, Zhang X, Meng Z D, et al. Off-line programming system of industrial robot for spraying manufacturing optimization[C]//Proceedings of the 33rd Chinese Control Conference. Nanjing: IEEE, 2014 [6] Cordes M, Hintze W. Offline simulation of path deviation due to joint compliance and hysteresis for robot machining[J]. The International Journal of Advanced Manufacturing Technology, 2017, 90(1-4):1075-1083 doi: 10.1007/s00170-016-9461-z [7] 杨锐, 云宇, 刘子维, 等.工业机器人轮式抛光技术研究[J].光电工程, 2018, 45(5):63-70 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gdgc201805008Yang R, Yun Y, Liu Z W, et al. Study on wheeled polishing technology based on industrial robot[J]. Opto-Electronic Engineering, 2018, 45(5):63-70(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gdgc201805008 [8] 李明富, 马建华, 张玉彦.基于机器人的空间坐标测量技术研究现状及发展趋势[J].机械科学与技术, 2014, 33(12):1818-1825 doi: 10.13433/j.cnki.1003-8728.2014.1212Li M F, Ma J H, Zhang Y Y. The state and development tendency of the space coordinate measuring technology via robots[J]. Mechanical Science and Technology for Aerospace Engineering, 2014, 33(12):1818-1825(in Chinese) doi: 10.13433/j.cnki.1003-8728.2014.1212 [9] Liu Q, Zhou X Q, Liu Z W, et al. Long-stroke fast tool servo and a tool setting method for freeform optics fabrication[J]. Optical Engineering, 2014, 53(9):092005 doi: 10.1117/1.OE.53.9.092005 [10] 胡东红, 张玲, 叶波, 等.基于最差齿槽边沿角度的齿轮磨削对刀法[J].机械科学与技术, 2016, 35(6):901-905 doi: 10.13433/j.cnki.1003-8728.2016.0614Hu D H, Zhang L, Ye B, et al. Gear grinding tool setting method based on worst angle of tooth space edges[J]. Mechanical Science and Technology for Aerospace Engineering, 2016, 35(6):901-905(in Chinese) doi: 10.13433/j.cnki.1003-8728.2016.0614 [11] 熊烁, 叶伯生, 蒋明.机器人工具坐标系标定算法研究[J].机械与电子, 2012, (6):60-63 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxydz201206017Xiong S, Ye B S, Jiang M. Study of robot tool coordinate frame calibration[J]. Machinery & Electronics, 2012, (6):60-63(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxydz201206017 [12] 李宏胜, 汪允鹤.六关节工业机器人工具坐标系的标定[J].自动化技术与应用, 2016, 35(8):101-104 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hljzdhjsyyy201608023Li H S, Wang Y H. Calibration of tool coordinate system for six joint industrial robot[J]. Techniques of Automation & Applications, 2016, 35(8):101-104(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hljzdhjsyyy201608023 [13] 韩奉林, 江晓磊, 严宏志.基于可测距平板工具的机器人TCP标定方法[J].计算机工程与应用, 2016, 52(18):18-23 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjgcyyy201618004Han F L, Jiang X L, Yan H Z. Robotic TCP calibration method based on plane toolbar with distance measure function[J]. Computer Engineering and Applications, 2016, 52(18):18-23(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjgcyyy201618004 [14] 孙义林, 樊成, 陈国栋, 等.基于激光跟踪仪的机器人抛光工具系统标定[J].制造业自动化, 2014, 36(12):105-108 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zzyzdh201424027Sun Y L, Fan C, Chen G D, et al. Tool calibration for the robotic polishing system based on the laser tracker[J]. Manufacturing Automation, 2014, 36(12):105-108(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zzyzdh201424027 [15] Wang W, Yu G Y, Xu M, et al. Coordinate transformation of an industrial robot and its application in deterministic optical polishing[J]. Optical Engineering, 2014, 53(5):055102 doi: 10.1117/1.OE.53.5.055102 -




 点击查看大图
点击查看大图

图(7) / 表(2)
计量
- 文章访问数: 265
- HTML全文浏览量: 84
- PDF下载量: 17
- 被引次数: 0
