




Research of Reverse Dynamics of Human Gait via AnyBody Technology
-
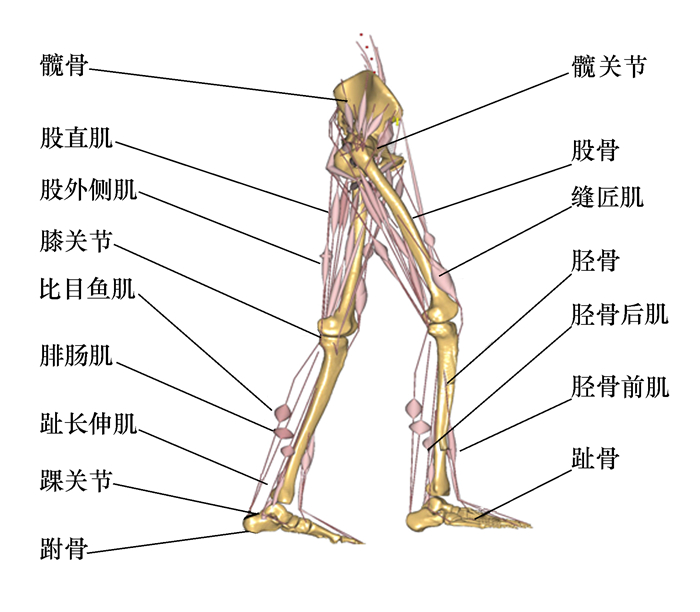
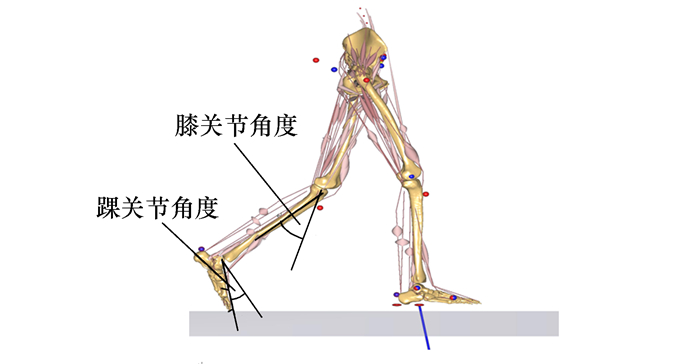
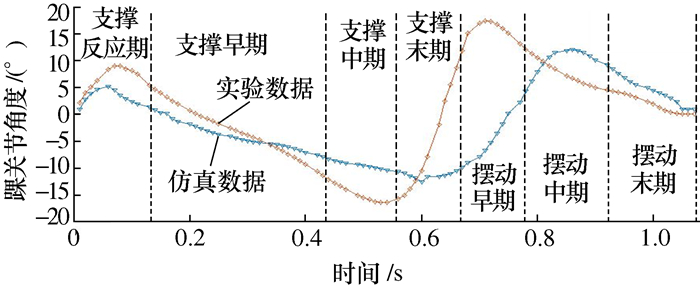
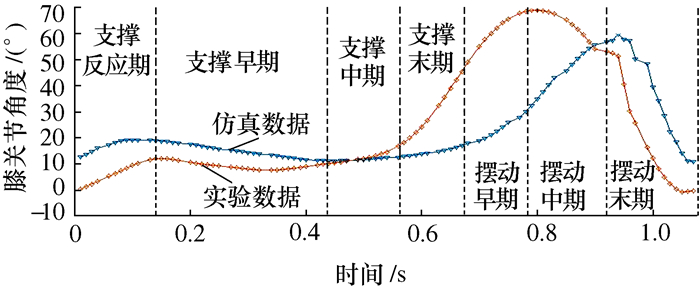
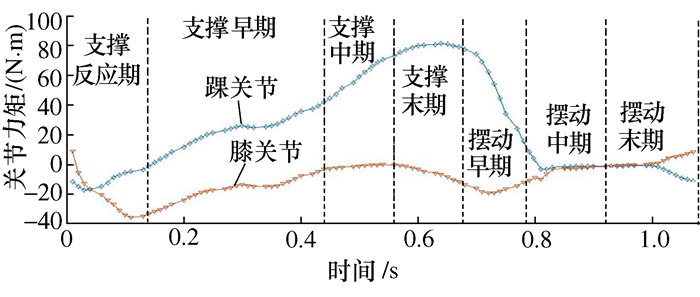
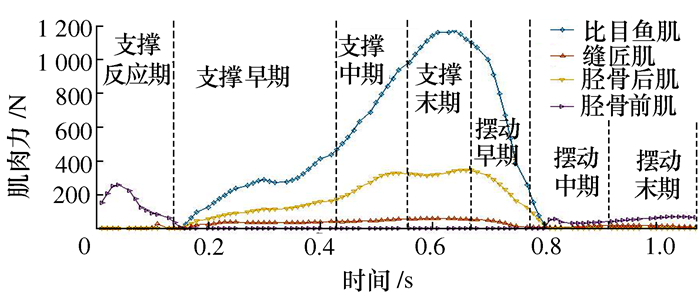
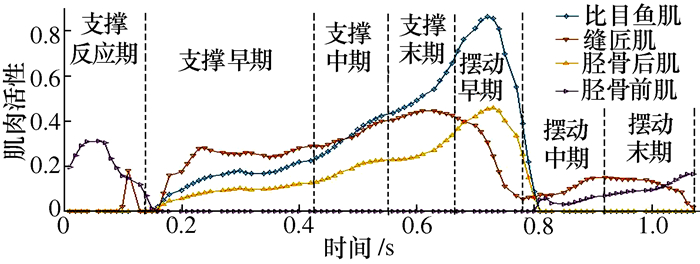
摘要: 为了分析人体步态运动中包含肌骨系统的下肢动力学特性,基于生物力学分析软件AnyBody建立一种包含肌骨系统的下肢运动模型。利用逆向动力学,在下肢运动关节等处设置运动控制点,以运动控制点三维坐标和地面支反力为驱动,完成了人体的正常步态仿真,得到了人体正常步态下的踝关节和膝关节的角度、力矩的变化曲线,分析了关节力矩与角度变化之间的关系;给出了比目鱼肌、缝匠肌、胫骨后肌和胫骨前肌在步态周期内的肌肉力和活性变化曲线,讨论了肌肉力和肌肉活性之间的关系。Abstract: In order to analyze the dynamic characteristics of the lower limb including the musculoskeletal system in human gait movement, the lower limb motion model including the musculoskeletal system are established by using a biomechanics software, AnyBodyTM Modeling System. By using the reverse dynamics, the human body is driven by the three-dimensional coordinates of the motion control points set on the lower limb joints and the ground reaction force. Then the normal gait simulation of the human body is completed. The curves of the angles and moments of the ankle joint and knee joint in the normal gait are obtained, and the relationship between the joint torque and the angle is analyzed. The curves of the muscle strength and muscle activity of the soleus, sartorius, tibialis posterior and tibialis anterior muscle are given in the gait cycle. The relationship between the muscle strength and activity is discussed.
-
Key words:
- AnyBody /
- inverse dynamics /
- gait /
- muscle strength /
- muscle activity
-
表 1 人体下肢尺寸
部位名称 质量/kg 长度/m 髋关节 9.23 0.175 大腿(右) 6.86 0.46 大腿(左) 6.82 0.46 小腿(右) 3.28 0.43 小腿(左) 3.28 0.43 右脚 0.67 0.26 左脚 0.66 0.26  下载: 导出CSV
下载: 导出CSV
-
[1] 石俊, 姜寿山, 张欣, 等.人体步态研究与仿真的现状和展望[J].系统仿真学报, 2006, 18(10):2703-2708, 2711 doi: 10.3969/j.issn.1004-731X.2006.10.002Shi J, Jiang S S, Zhang X, et al. Status quo and trend of research and simulation on human-gait[J]. Journal of System Simulation, 2006, 18(10):2703-2708, 2711(in Chinese) doi: 10.3969/j.issn.1004-731X.2006.10.002 [2] Hurwitz D E, Ryals A R, Block J A, et al. Knee pain and joint loading in subjects with osteoarthritis of the knee[J]. Journal of Orthopaedic Research, 2000, 18(4):527-579 http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_9254ac182b22830ddb06a17e287d8a58 [3] Damsgaard M, Rasmussen J, Christensen S T, et al. Analysis of musculoskeletal systems in the AnyBody modeling system[J]. Simulation Modelling Practice and Theory, 2006, 14(8):1100-1111 doi: 10.1016/j.simpat.2006.09.001 [4] Collins S H, Wiggin M B, Sawicki G S. Reducing the energy cost of human walking using an unpowered exoskeleton[J]. Nature, 2015, 522(7555):212-215 doi: 10.1038/nature14288 [5] Mooney L M, Rouse E J, Herr H M. Autonomous exoskeleton reduces metabolic cost of human walking[J]. Journal of NeuroEngineering and Rehabilitation, 2014, 11(1):151 doi: 10.1186/1743-0003-11-151 [6] Zelik K E, Huang T W P, Adamczyk P G, et al. The role of series ankle elasticity in bipedal walking[J]. Journal of Theoretical Biology, 2014, 346:75-85 doi: 10.1016/j.jtbi.2013.12.014 [7] 许鸿谦.助力外骨骼人机系统动力与能量驱动特征研究[D].成都: 西南交通大学, 2018 http://cdmd.cnki.com.cn/Article/CDMD-10613-1018825560.htmXu H Q. The research on power and energy driving of man-machine system exoskeleton[D]. Chengdu: Southwest Jiaotong University, 2018(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10613-1018825560.htm [8] 梁国星, 梁宇航, 李志利, 等.基于牛顿-欧拉动力学方程的人体下肢动力学分析[J].航天医学与医学工程, 2017, 30(6):411-417 http://d.old.wanfangdata.com.cn/Periodical/htyxyyxgc201706005Liang G X, Liang Y H, Li Z L, et al. Dynamics analysis for human lower limb based on newton-euler equation[J]. Space Medicine & Medical Engineering, 2017, 30(6):411-417(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/htyxyyxgc201706005 [9] Vaughan C L, Davis B L, O'Connor J C. Dynamics of human gait[M]. South African:Human Kinetics Publishers, 1999 [10] 何福本, 梁延德, 何太云.类人机器人仿真平台构建及其Matlab实现[J].机械科学与技术, 2011, 30(5):703-707 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxkxyjs201105004He F B, Liang Y D, He T Y. Construction and realization of a humanoid robot's simulation platform based on Matlab[J]. Mechanical Science and Technology for Aerospace Engineering, 2011, 30(5):703-707(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxkxyjs201105004 [11] 贾山, 韩亚丽, 路新亮, 等.基于人体特殊步态分析的下肢外骨骼机构设计[J].机器人, 2014, 36(4):392-401, 410 http://d.old.wanfangdata.com.cn/Periodical/jqr201404002Jia S, Han Y L, Lu X L, et al. Design of lower extremity exoskeleton based on analysis on special human gaits[J]. Robot, 2014, 36(4):392-401, 410(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jqr201404002 [12] 高飞, 项忠霞, 赵明, 等.基于AnyBody的自行车骑行运动仿真与试验分析[J].机械设计, 2016, 33(1):105-110 doi: 10.3969/j.issn.1001-3997.2016.01.029Gao F, Xiang Z X, Zhao M, et al. Simulation and testing analysis of bicycle riding motion based on anybody[J]. Journal of Machine Design, 2016, 33(1):105-110(in Chinese) doi: 10.3969/j.issn.1001-3997.2016.01.029 [13] 尹传盛, 孙芳, 贺缨, 等.基于AnyBody软件平台冷水刺激前后食指动力学[J].中国组织工程研究, 2013, 17(22):4091-4098 doi: 10.3969/j.issn.2095-4344.2013.22.015Yin C S, Sun F, He Y, et al. Dynamical chanracteristics of index finger in response to cold water stimulation:analysis based on Anybody platform[J]. Chinese Journal of Tissue Engineering Research, 2013, 17(22):4091-4098(in Chinese) doi: 10.3969/j.issn.2095-4344.2013.22.015 [14] 刘书朋, 司文, 严壮志, 等.基于AnyBodyTM技术的人体运动建模方法[J].生物医学工程学进展, 2010, 31(3):131-134 doi: 10.3969/j.issn.1674-1242.2010.03.002Liu S P, Si W, Yan Z Z, et al. The human motions modeling and simulation based on AnyBody technology[J]. Progress in Biomedical Engineering, 2010, 31(3):131-134(in Chinese) doi: 10.3969/j.issn.1674-1242.2010.03.002 [15] Rasmussen J, Damsgaard M, Voigt M. Muscle recruitment by the min/max criterion-a comparative numerical study[J]. Journal of Biomechanics, 2001, 34(3):409-415 doi: 10.1016/S0021-9290(00)00191-3 [16] 梁宇航.多关节低阻尼下肢外骨骼动力学特性的研究[D].太原: 太原理工大学, 2017 http://cdmd.cnki.com.cn/Article/CDMD-10112-1017832433.htmLiang Y H. Study on dynamic characteristics of multi-joint low damping lower limb exoskeleton[D]. Taiyuan: Taiyuan University of Technology, 2017(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10112-1017832433.htm [17] 杨南, 戴士杰.基于ADAMS的人体步态运动仿真[J].机械工程与自动化, 2015(6):56-58 doi: 10.3969/j.issn.1672-6413.2015.06.023Yang N, Dai S J. Human body gait movement simulation based on ADAMS[J]. Mechanical Engineering & Automation, 2015(6):56-58(in Chinese) doi: 10.3969/j.issn.1672-6413.2015.06.023 [18] Rasmussen J, Tørholm S, de Zee M. Computational analysis of the influence of seat pan inclination and friction on muscle activity and spinal joint forces[J]. International Journal of Industrial Ergonomics, 2009, 39(1):52-57 doi: 10.1016/j.ergon.2008.07.008 [19] 国家技术监督局.GB 10000-88中国成年人人体尺寸[S].北京: 中国标准出版社, 1988State Bureau of Technical Supervision. GB 10000-88 Human dimensions of Chinese adults[S]. Beijing: Standards Press of China, 1988(in Chinese) [20] 孙金龙, 闫英霞, 张国祥.希尔肌肉方程在速滑肌肉动态分析中的应用[J].高师理科学刊, 2001, 21(3):59-62 doi: 10.3969/j.issn.1007-9831.2001.03.021Sun J L, Yan Y X, Zhang G X. The application of HILL's muscle function in the analysis of muscle dynamical state during speed skating[J]. Journal of Science of Teachers' College and University, 2001, 21(3):59-62(in Chinese) doi: 10.3969/j.issn.1007-9831.2001.03.021 [21] 王劲松, 王令军, 王婷, 等.不同步速下人体步态规律的测量与研究[J].传感器与微系统, 2008, 27(9):43-45, 49 doi: 10.3969/j.issn.1000-9787.2008.09.014Wang J S, Wang L J, Wang T, et al. Measurement and research on human gait law at different walking speeds[J]. Transducer and Microsystem Technologies, 2008, 27(9):43-45, 49(in Chinese) doi: 10.3969/j.issn.1000-9787.2008.09.014 [22] 韩晓建, 商李隐, 杨涌.四足机器人启动步态设计及稳定性分析[J].机械科学与技术, 2016, 35(8):1169-1175 doi: 10.13433/j.cnki.1003-8728.2016.0804Han X J, Shang L Y, Yang Y. Start gait design and stability analysis of a quadruped robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2016, 35(8):1169-1175(in Chinese) doi: 10.13433/j.cnki.1003-8728.2016.0804 [23] Alamoudi M, Travascio F, Onar-Thomas A, et al. The effects of different carrying methods on locomotion stability, gait spatio-temporal parameters and spinal stresses[J]. International Journal of Industrial Ergonomics, 2018, 67:81-88 doi: 10.1016/j.ergon.2018.04.012 -


 点击查看大图
点击查看大图
图(10) / 表(1)
计量
- 文章访问数: 914
- HTML全文浏览量: 501
- PDF下载量: 100
- 被引次数: 0
