


 Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2019 Vol. 38, No. 8
Display Method:
2019, 38(8): 1149-1156.
doi: 10.13433/j.cnki.1003-8728.20180292
 PDF 1324KB
PDF 1324KB
Abstract:
The spring clutch is installed on the input shaft of the helicopter main reducer, and excited by the speed and torque fluctuation of the engine and reducer. In order to find out the torque-transfer ability and time-varying characteristics of the spring clutch under the fluctuation of its input and output shaft, the finite element dynamic model for spring clutch is established, and the temperature difference method is used to simulate the pre-tightening of the spring/housing and spring/mandrel. The time-varying regularity of following characteristics, contact pressure, axial and tangential slip are analyzed during high speed spring clutch operation. The results indicate that comparing with the no-speed fluctuation, the 5% input speed fluctuation of the engine increases 2.87 times of the average speed difference between the input and output housings, and the 19.3% of the average compressive stress. Comparing with the no-torque fluctuation, the 5% output torque fluctuation of the engine increases 2.16 times of the average speed difference between the input and output housings, and the 61.3% of the average compressive stress. In addition, the tangential slip of the spring input end is larger than the output end, and the axial middle slip is the largest, then the rotational speed fluctuation has a significant influence on the tangential slip of the clutch output end.
The spring clutch is installed on the input shaft of the helicopter main reducer, and excited by the speed and torque fluctuation of the engine and reducer. In order to find out the torque-transfer ability and time-varying characteristics of the spring clutch under the fluctuation of its input and output shaft, the finite element dynamic model for spring clutch is established, and the temperature difference method is used to simulate the pre-tightening of the spring/housing and spring/mandrel. The time-varying regularity of following characteristics, contact pressure, axial and tangential slip are analyzed during high speed spring clutch operation. The results indicate that comparing with the no-speed fluctuation, the 5% input speed fluctuation of the engine increases 2.87 times of the average speed difference between the input and output housings, and the 19.3% of the average compressive stress. Comparing with the no-torque fluctuation, the 5% output torque fluctuation of the engine increases 2.16 times of the average speed difference between the input and output housings, and the 61.3% of the average compressive stress. In addition, the tangential slip of the spring input end is larger than the output end, and the axial middle slip is the largest, then the rotational speed fluctuation has a significant influence on the tangential slip of the clutch output end.




























Research on Dynamic Response of Bistable Vibration Energy Power Generation System Excited by Impulse
2019, 38(8): 1157-1164.
doi: 10.13433/j.cnki.1003-8728.20180286
Abstract:
The mechanical model and governing equations of the 2DOF bistable vibration energy electromagnetic power generation system are obtained by combining bistable vibration energy harvester and 1DOF mass spring damping system in a series pattern in this paper. The effects of the excitation amplitude and duty cycle of rectangular impulse and half sine impulse on the dynamic response are analyzed by simulations. The relation curves of the output power and nonlinear stiffness ratio under the two types of impulse excitation are got, and their optimal nonlinear stiffness ratios are obtained. The structural parameter configuration ranges of the mass ratio and tuning frequency ratio of the bistable vibration energy power generation system are obtained to generate more usable output power by varying the values of the mass ratio and tuning frequency ratio.
The mechanical model and governing equations of the 2DOF bistable vibration energy electromagnetic power generation system are obtained by combining bistable vibration energy harvester and 1DOF mass spring damping system in a series pattern in this paper. The effects of the excitation amplitude and duty cycle of rectangular impulse and half sine impulse on the dynamic response are analyzed by simulations. The relation curves of the output power and nonlinear stiffness ratio under the two types of impulse excitation are got, and their optimal nonlinear stiffness ratios are obtained. The structural parameter configuration ranges of the mass ratio and tuning frequency ratio of the bistable vibration energy power generation system are obtained to generate more usable output power by varying the values of the mass ratio and tuning frequency ratio.













2019, 38(8): 1165-1172.
doi: 10.13433/j.cnki.1003-8728.20180302
Abstract:
The effect of gravity on the similarity of vibration of sliding bearing of prototype and model was discussed. The scaling laws of nonlinear dynamical systems considering gravity of rotor were established by dimensional analysis. The limitation of gravity law on the design of completely similitude scale model was analyzed, and the compensation scheme was proposed to satisfy the scaling laws. The distorted scaling law was established on the basis of considering geometric distortion by using optimization theory. Finally, the numerical simulation models only considering gravity and simultaneously considering gravity and geometric distortion were established to verify the derived scaling laws. The simulation results were compared with those of the models unmodified. It's shown that the modified model can accurately predict the vibration response of prototype, while the prediction results of the unmodified models have large errors, and they cannot be used in nonlinear vibration test.
The effect of gravity on the similarity of vibration of sliding bearing of prototype and model was discussed. The scaling laws of nonlinear dynamical systems considering gravity of rotor were established by dimensional analysis. The limitation of gravity law on the design of completely similitude scale model was analyzed, and the compensation scheme was proposed to satisfy the scaling laws. The distorted scaling law was established on the basis of considering geometric distortion by using optimization theory. Finally, the numerical simulation models only considering gravity and simultaneously considering gravity and geometric distortion were established to verify the derived scaling laws. The simulation results were compared with those of the models unmodified. It's shown that the modified model can accurately predict the vibration response of prototype, while the prediction results of the unmodified models have large errors, and they cannot be used in nonlinear vibration test.









2019, 38(8): 1173-1184.
doi: 10.13433/j.cnki.1003-8728.20180293
Abstract:
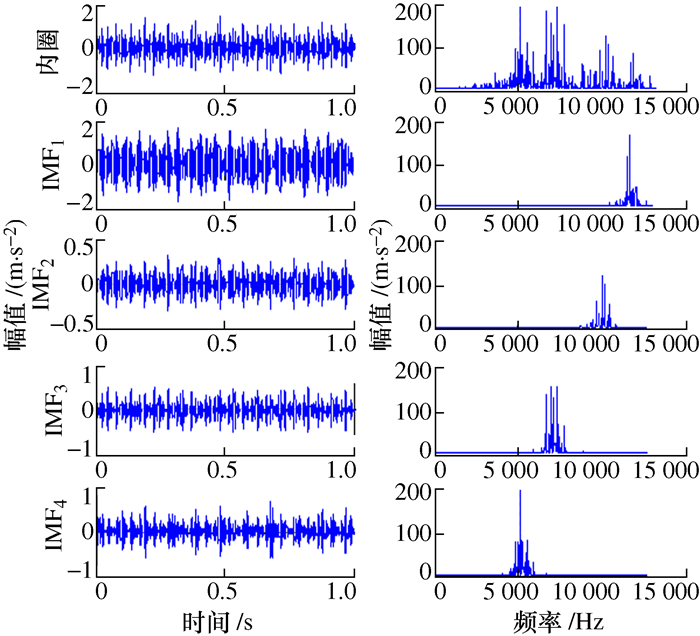
In view of the problem that the vibration signal of check valve contains the background noise, difficulty in extracting fault features and low diagnostic precision, a fault diagnosis method combining quadratic VMD (quadratic variational mode decomposition), MPE (multiscale permutation entropy) and FCM (fuzzy C-means clustering) is proposed. Firstly, the vibration signals are decomposed by the quadratic VMD, and then the useful IMF (intrinsic mode functions) are obtained by using the double threshold method. Secondly, the MPE features with sensitive characteristic are extracted from the reconstructed signals. Finally, the fault features are input into the FCM to get the cluster centers, and the samples to be identified are classified according to the Hamming approach degree. Through a number of comparison experiments, the results show that the quadratic VMD screening method can remove the background noise and false components, and the MPE has a better ability to characterize the sensitive features. At the same time, the use of FCM to classify fuzzy features can achieve better results than traditional SVM (support vector machine).
In view of the problem that the vibration signal of check valve contains the background noise, difficulty in extracting fault features and low diagnostic precision, a fault diagnosis method combining quadratic VMD (quadratic variational mode decomposition), MPE (multiscale permutation entropy) and FCM (fuzzy C-means clustering) is proposed. Firstly, the vibration signals are decomposed by the quadratic VMD, and then the useful IMF (intrinsic mode functions) are obtained by using the double threshold method. Secondly, the MPE features with sensitive characteristic are extracted from the reconstructed signals. Finally, the fault features are input into the FCM to get the cluster centers, and the samples to be identified are classified according to the Hamming approach degree. Through a number of comparison experiments, the results show that the quadratic VMD screening method can remove the background noise and false components, and the MPE has a better ability to characterize the sensitive features. At the same time, the use of FCM to classify fuzzy features can achieve better results than traditional SVM (support vector machine).














2019, 38(8): 1185-1190.
doi: 10.13433/j.cnki.1003-8728.20190107
Abstract:
Aiming at the application environment of rough walls which widely existing in nature world, a bio-inspired biped wall-climbing robot with spines that mimics insects' climbing action is proposed. The robot consists of two legs and rear wheels, and its feet are driven by Chebyshev linkage mechanisms to grasp and climb on wall surfaces alternately. It can achieve attaching and detaching movements of insects' feet, climbs steadily on vertical rough brick surfaces, and can also overcome some obstacles. The linkage mechanism model of the robot's leg is established, and the attaching and detaching movements of the foot during climbing process are analyzed, and several climbing experiments of a robot prototype are carried out on a variety of wall surfaces.
Aiming at the application environment of rough walls which widely existing in nature world, a bio-inspired biped wall-climbing robot with spines that mimics insects' climbing action is proposed. The robot consists of two legs and rear wheels, and its feet are driven by Chebyshev linkage mechanisms to grasp and climb on wall surfaces alternately. It can achieve attaching and detaching movements of insects' feet, climbs steadily on vertical rough brick surfaces, and can also overcome some obstacles. The linkage mechanism model of the robot's leg is established, and the attaching and detaching movements of the foot during climbing process are analyzed, and several climbing experiments of a robot prototype are carried out on a variety of wall surfaces.

















2019, 38(8): 1191-1198.
doi: 10.13433/j.cnki.1003-8728.20180290
Abstract:
In order to study the influence of the length-diameter ratio of the squeeze film damper on the fixed-point rub-impact of the rotor system, a windmill unbalanced simulation rubbing test bench of rotor-bearing-rigid casing system was built. Simplify the experimental model to obtain the double-disk rolling bearing rotor dynamical model. Before the experiment, study the dynamic response of the fixed-point rubbing fault in the double-disk-rolling bearing rotor windmill state, and make corresponding predictions for the experiment. Simplifying the rub-impact model of the double-disk rolling bearing rotor system into a concentrated mass model, based on the D'Alembert principle, the nonlinear equation of rub-impact dynamics of a double-disk rolling bearing rotor system considering nonlinear oil film force, rubbing force and bearing force was established. Solving dynamic equations by the fourth-order Runge-Kutta method, the variation law of system's displacement response with length-diameter ratio of squeeze film damper was analyzed. The results show that the length-diameter ratio is the sensitive parameter to affect the motion state of the rotor. If increasing length-diameter ratio, the motion state of the rotor maybe experiences chaotic motion, periodic motion, quasi-periodic motion and chaotic motion and finally maintains chaotic motion; as the length-diameter ratio increases, the anti-failure imbalance of the rotor system increases first and then decreases slowly; the rotor system has the best anti-vibration performance when the length-diameter ratio is near 0.4.
In order to study the influence of the length-diameter ratio of the squeeze film damper on the fixed-point rub-impact of the rotor system, a windmill unbalanced simulation rubbing test bench of rotor-bearing-rigid casing system was built. Simplify the experimental model to obtain the double-disk rolling bearing rotor dynamical model. Before the experiment, study the dynamic response of the fixed-point rubbing fault in the double-disk-rolling bearing rotor windmill state, and make corresponding predictions for the experiment. Simplifying the rub-impact model of the double-disk rolling bearing rotor system into a concentrated mass model, based on the D'Alembert principle, the nonlinear equation of rub-impact dynamics of a double-disk rolling bearing rotor system considering nonlinear oil film force, rubbing force and bearing force was established. Solving dynamic equations by the fourth-order Runge-Kutta method, the variation law of system's displacement response with length-diameter ratio of squeeze film damper was analyzed. The results show that the length-diameter ratio is the sensitive parameter to affect the motion state of the rotor. If increasing length-diameter ratio, the motion state of the rotor maybe experiences chaotic motion, periodic motion, quasi-periodic motion and chaotic motion and finally maintains chaotic motion; as the length-diameter ratio increases, the anti-failure imbalance of the rotor system increases first and then decreases slowly; the rotor system has the best anti-vibration performance when the length-diameter ratio is near 0.4.









2019, 38(8): 1199-1205.
doi: 10.13433/j.cnki.1003-8728.20180284
Abstract:
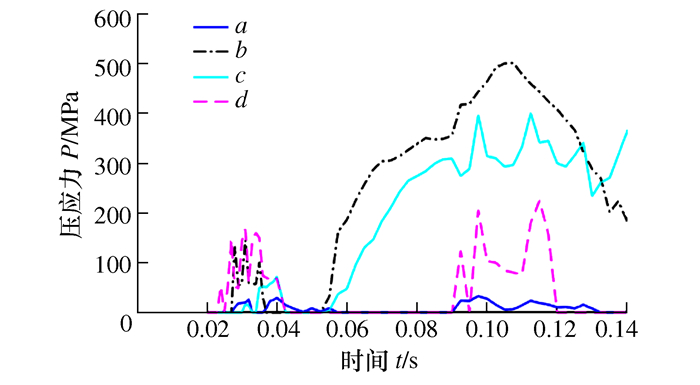
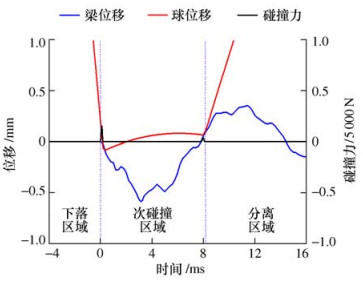
In order to study the influence of the mass ratio and the relative velocity of impact on the sub-impacts of flexible links, an experimental model for ball impact flexible beam was set up. By designing four kind experimental combinations of the ball impact beam and establishing the finite element model for experimental structure size 1:1, the sub-impacts inducements of a ball impact beam was studied. The study showed that the finite element method could accurately simulate the sub-impact experiment process, and then combined with the experimental results. The following conclusions were obtained:1) if the mass ratio is not suitable, the change in relative velocity of impact will not excite the sub-impacts phenomenon; 2) when the mass ratio is in the critical value of the sub-impacts phenomenon, the change in relative velocity of impact will directly affect the number and form of the sub-impacts. According to the present study, the mass ratio plays a leading role in the sub-impacts inducements, the results can be used as reference for controlling the number of sub-impacts of flexible links.
In order to study the influence of the mass ratio and the relative velocity of impact on the sub-impacts of flexible links, an experimental model for ball impact flexible beam was set up. By designing four kind experimental combinations of the ball impact beam and establishing the finite element model for experimental structure size 1:1, the sub-impacts inducements of a ball impact beam was studied. The study showed that the finite element method could accurately simulate the sub-impact experiment process, and then combined with the experimental results. The following conclusions were obtained:1) if the mass ratio is not suitable, the change in relative velocity of impact will not excite the sub-impacts phenomenon; 2) when the mass ratio is in the critical value of the sub-impacts phenomenon, the change in relative velocity of impact will directly affect the number and form of the sub-impacts. According to the present study, the mass ratio plays a leading role in the sub-impacts inducements, the results can be used as reference for controlling the number of sub-impacts of flexible links.












2019, 38(8): 1206-1213.
doi: 10.13433/j.cnki.1003-8728.20180304
Abstract:
In this paper, the dynamic model of a two-stage rotor system which is connected by a gear coupling and supported on ball bearings is established. The meshing force of gear, misalignment, and rub-impact are introduced into the model. Experiments on the rotor and its misalignment-rubbing faults at low speed are conducted. The nonlinear dynamic behavior of the rotor system is studied under fault conditions. The experimental data of the rotor system under misalignment-rub is analyzed. The results show that:the effect of rub fault on the rotor system is not clear under low speed; some frequency divisions appear and the double frequency amplitude has only a little change; the simulation results show that with the increasing of speed, the rub occurs between the rotor and the stator, sideband frequencies appear, the system becomes more unstable, and the change of rub-impact force is irregular.
In this paper, the dynamic model of a two-stage rotor system which is connected by a gear coupling and supported on ball bearings is established. The meshing force of gear, misalignment, and rub-impact are introduced into the model. Experiments on the rotor and its misalignment-rubbing faults at low speed are conducted. The nonlinear dynamic behavior of the rotor system is studied under fault conditions. The experimental data of the rotor system under misalignment-rub is analyzed. The results show that:the effect of rub fault on the rotor system is not clear under low speed; some frequency divisions appear and the double frequency amplitude has only a little change; the simulation results show that with the increasing of speed, the rub occurs between the rotor and the stator, sideband frequencies appear, the system becomes more unstable, and the change of rub-impact force is irregular.















2019, 38(8): 1214-1222.
doi: 10.13433/j.cnki.1003-8728.20180298
Abstract:
Due to the complicated error model or harsh experimental conditions for the current planar constraints calibration of the industrial robot, this paper proposed a new and easily operated planar constraints self-calibration technique. A modified error model of the robot's manipulator's end position was set up, and the coordinate system at one corner of the calibration block was established. After recording the joint data of the robot at its touching moment by touching the three planes of the corner in sequence and transforming the manipulator's end position into the coordinate system, the error model was established. Finally, the kinematic parametric errors was identified and modified into the robot's controller. The paper realized the automatic measurement by using the touching probe and program developed in the paper, thus enhancing the calibration efficiency. The experimental results show that the positioning accuracy of the robot apparently increases. The self-calibration technique has the advantage of low cost, high efficiency and easy operation. The error model is simplified on the condition that the calibration accuracy is ensured.
Due to the complicated error model or harsh experimental conditions for the current planar constraints calibration of the industrial robot, this paper proposed a new and easily operated planar constraints self-calibration technique. A modified error model of the robot's manipulator's end position was set up, and the coordinate system at one corner of the calibration block was established. After recording the joint data of the robot at its touching moment by touching the three planes of the corner in sequence and transforming the manipulator's end position into the coordinate system, the error model was established. Finally, the kinematic parametric errors was identified and modified into the robot's controller. The paper realized the automatic measurement by using the touching probe and program developed in the paper, thus enhancing the calibration efficiency. The experimental results show that the positioning accuracy of the robot apparently increases. The self-calibration technique has the advantage of low cost, high efficiency and easy operation. The error model is simplified on the condition that the calibration accuracy is ensured.






2019, 38(8): 1223-1230.
doi: 10.13433/j.cnki.1003-8728.20190109
Abstract:
In view of the problem that the control performance of electro-hydraulic position servo system is poor due to parameter uncertainty, complex time variability and nonlinearity. A sliding mode control method for electro-hydraulic position servo system based on improved particle swarm optimization (PSO) algorithm is proposed. The error state space equation of electro-hydraulic position servo system is established. The sliding mode controller structure is deduced by designing sliding mode surface and control rule. The stability of the controller is verified by Lyapunov function. The PSO algorithm is improved by using Cauchy mutation and adaptive speed update strategy, and the improved PSO algorithm is applied to the parameter optimization of sliding mode controller. Based on AMEsim/MATLAB co-simulation, the position tracking performance of the system for several methods is studied. The results show that the performance of the improved PSO algorithm is better than that of the PSO algorithm and the APSO algorithm, which proves that the improved method is effective. Through the comparison and analysis, the sliding mode controller with improved PSO algorithm is better, which greatly improves the control performance of the system and realizes the fast and accurate tracking of the state trajectory while damping the vibration. The feasibility of the proposed method is verified by experimental results.
In view of the problem that the control performance of electro-hydraulic position servo system is poor due to parameter uncertainty, complex time variability and nonlinearity. A sliding mode control method for electro-hydraulic position servo system based on improved particle swarm optimization (PSO) algorithm is proposed. The error state space equation of electro-hydraulic position servo system is established. The sliding mode controller structure is deduced by designing sliding mode surface and control rule. The stability of the controller is verified by Lyapunov function. The PSO algorithm is improved by using Cauchy mutation and adaptive speed update strategy, and the improved PSO algorithm is applied to the parameter optimization of sliding mode controller. Based on AMEsim/MATLAB co-simulation, the position tracking performance of the system for several methods is studied. The results show that the performance of the improved PSO algorithm is better than that of the PSO algorithm and the APSO algorithm, which proves that the improved method is effective. Through the comparison and analysis, the sliding mode controller with improved PSO algorithm is better, which greatly improves the control performance of the system and realizes the fast and accurate tracking of the state trajectory while damping the vibration. The feasibility of the proposed method is verified by experimental results.












2019, 38(8): 1231-1238.
doi: 10.13433/j.cnki.1003-8728.20180297
Abstract:
At present, various adaptive slicing algorithms have been proposed in fused deposition forming in order to improve the disadvantages that the forming efficiency and forming accuracy cannot be balanced. Among them, the adaptive slicing algorithm based on the triangular face normal vector of STL model has the following problems, If the angle between the triangulation normal vector and the layering direction is too large or too small, this algorithm cannot achieve the adaptive change of the layer thickness as the angle between the normal vector and the layering direction changes. For this purpose, this paper applies normalization algorithms to improve it, and after equalizing the thickness of the model, determine the adaptive layer thickness of each layer according to the normalized principle. Secondly, based on MATLAB, this adaptive slicing algorithm and its improved algorithm are simulated. Finally, the experimental verification is performed on the fused deposition experimental platform. The experimental results show that comparing with the original algorithm, the improved adaptive slicing algorithm is significantly improved, and the part molding efficiency is increased by 22%, and the forming accuracy is increased by 29%, which is practical and effective.
At present, various adaptive slicing algorithms have been proposed in fused deposition forming in order to improve the disadvantages that the forming efficiency and forming accuracy cannot be balanced. Among them, the adaptive slicing algorithm based on the triangular face normal vector of STL model has the following problems, If the angle between the triangulation normal vector and the layering direction is too large or too small, this algorithm cannot achieve the adaptive change of the layer thickness as the angle between the normal vector and the layering direction changes. For this purpose, this paper applies normalization algorithms to improve it, and after equalizing the thickness of the model, determine the adaptive layer thickness of each layer according to the normalized principle. Secondly, based on MATLAB, this adaptive slicing algorithm and its improved algorithm are simulated. Finally, the experimental verification is performed on the fused deposition experimental platform. The experimental results show that comparing with the original algorithm, the improved adaptive slicing algorithm is significantly improved, and the part molding efficiency is increased by 22%, and the forming accuracy is increased by 29%, which is practical and effective.











2019, 38(8): 1239-1243.
doi: 10.13433/j.cnki.1003-8728.20190108
Abstract:
A surface flattening algorithm based on local conformal mapping and global elastic energy optimization is proposed for complex surface mesh. Based on the local-to-global methodology, the local conformal mapping can be obtained by analyzing the singular values of the Jacobian matrix of affine transform on each local triangle. On the basis of local operations, these transformed meshes can be further stitched and optimized by iteratively minimizing a quadric energy function composed of linear elastic strain energy, which makes the internal force of the nodes reach the equilibrium state. Applications show that the proposed algorithm is stable and reliable, and can get good surface mesh flattening results.
A surface flattening algorithm based on local conformal mapping and global elastic energy optimization is proposed for complex surface mesh. Based on the local-to-global methodology, the local conformal mapping can be obtained by analyzing the singular values of the Jacobian matrix of affine transform on each local triangle. On the basis of local operations, these transformed meshes can be further stitched and optimized by iteratively minimizing a quadric energy function composed of linear elastic strain energy, which makes the internal force of the nodes reach the equilibrium state. Applications show that the proposed algorithm is stable and reliable, and can get good surface mesh flattening results.






2019, 38(8): 1244-1249.
doi: 10.13433/j.cnki.1003-8728.20180287
Abstract:
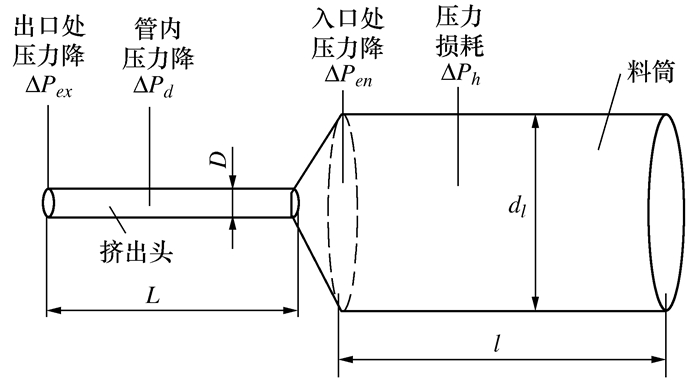
In 3D printing technology, model slicing is a very important part. A good model for slicing algorithm can not only improve accuracy, but also save time and memory space. In the micro fluid extrusion process, the thickness of the plies also has the large effect on the quality of the processed product, so it is important to determine the thickness of the layer. In this paper, the existing slicing algorithms are synthesized. According to the characteristics of the micro fluid extrusion process, the 3D printing method based on model geometric information of different materials is proposed. After a lot of experimental verification, it is found that the effect of the algorithm on the layer thickness is consistent with the actual, and the algorithm greatly reduces the printing time and increases the accuracy of the slice.
In 3D printing technology, model slicing is a very important part. A good model for slicing algorithm can not only improve accuracy, but also save time and memory space. In the micro fluid extrusion process, the thickness of the plies also has the large effect on the quality of the processed product, so it is important to determine the thickness of the layer. In this paper, the existing slicing algorithms are synthesized. According to the characteristics of the micro fluid extrusion process, the 3D printing method based on model geometric information of different materials is proposed. After a lot of experimental verification, it is found that the effect of the algorithm on the layer thickness is consistent with the actual, and the algorithm greatly reduces the printing time and increases the accuracy of the slice.




2019, 38(8): 1250-1256.
doi: 10.13433/j.cnki.1003-8728.20180303
Abstract:
Two different methods of joint-space jerk bounded and continuous PTP (point to point) motion trajectory planning is designed to solve the path tracking-error and torque oscillation problems when the SCARA(selective compliance assembly robot arm) manipulator runs in high-speed PTP motion. We use the nine-order polynomial and trigonometric functions respectively to plan the PTP motion trajectory, both of which ensure that the velocity and acceleration are limited to a certain range and that the jerk is bounded and continuous. The experimental results show that the trajectory planned with the trigonometric function and the polynomial function reduces the tracking error by 0.16° and 0.33°compared with the trapezoid velocity curve, leading to a shorter positioning time for path tracking. Furthermore, the method proposed in the paper effectively solves the torque oscillation problem.
Two different methods of joint-space jerk bounded and continuous PTP (point to point) motion trajectory planning is designed to solve the path tracking-error and torque oscillation problems when the SCARA(selective compliance assembly robot arm) manipulator runs in high-speed PTP motion. We use the nine-order polynomial and trigonometric functions respectively to plan the PTP motion trajectory, both of which ensure that the velocity and acceleration are limited to a certain range and that the jerk is bounded and continuous. The experimental results show that the trajectory planned with the trigonometric function and the polynomial function reduces the tracking error by 0.16° and 0.33°compared with the trapezoid velocity curve, leading to a shorter positioning time for path tracking. Furthermore, the method proposed in the paper effectively solves the torque oscillation problem.










2019, 38(8): 1257-1263.
doi: 10.13433/j.cnki.1003-8728.20180291
Abstract:
In order to improve tool utilization and reduce tool costs in milling process, a new approach to monitor tool wear state and replace tool in time by using machine vision technology was presented. A tool wear monitoring system was established. The wear images of the tool were obtained by using a charge coupled device (CCD) camera, and the wear boundaries were established by using image preprocessing, threshold segmentation and edge detection based on Canny operator and sub-pixel, then the wear value of the tool was extracted. Milling experiments of Superalloy GH4169 were carried out. The wear values detected by using the monitoring system were compared with that obtained by using ultra-deepth microscope. The results showed that the wear monitoring system had a high detection accuracy and enabled on-machine monitoring of tool wear in milling process.
In order to improve tool utilization and reduce tool costs in milling process, a new approach to monitor tool wear state and replace tool in time by using machine vision technology was presented. A tool wear monitoring system was established. The wear images of the tool were obtained by using a charge coupled device (CCD) camera, and the wear boundaries were established by using image preprocessing, threshold segmentation and edge detection based on Canny operator and sub-pixel, then the wear value of the tool was extracted. Milling experiments of Superalloy GH4169 were carried out. The wear values detected by using the monitoring system were compared with that obtained by using ultra-deepth microscope. The results showed that the wear monitoring system had a high detection accuracy and enabled on-machine monitoring of tool wear in milling process.













2019, 38(8): 1264-1269.
doi: 10.13433/j.cnki.1003-8728.20180305
Abstract:
In order to find a heat fin which matches well to the waist tube, the four main structural parameters including fin spacing(Fp), louver spacing(Lp), louver width(Lw) and louver angle(La), are optimized by using the orthogonal test and simulation. Then the influence of the each structural parameter on the heat transfer and pressure drop performance of radiator is obtained. It is found that the louver angle has the greatest influence on the performance of radiator, while the louver spaceing has the smallest influence. Based on the above results, the improved design structure is put forward. Finally, the wind tunnel experiments are carried out to compare the wasp waist tube radiator with the optimized radiator. The results show that the optimal louvered fin structure can obviously improve the air-side heat transfer and reduce the pressure drop.
In order to find a heat fin which matches well to the waist tube, the four main structural parameters including fin spacing(Fp), louver spacing(Lp), louver width(Lw) and louver angle(La), are optimized by using the orthogonal test and simulation. Then the influence of the each structural parameter on the heat transfer and pressure drop performance of radiator is obtained. It is found that the louver angle has the greatest influence on the performance of radiator, while the louver spaceing has the smallest influence. Based on the above results, the improved design structure is put forward. Finally, the wind tunnel experiments are carried out to compare the wasp waist tube radiator with the optimized radiator. The results show that the optimal louvered fin structure can obviously improve the air-side heat transfer and reduce the pressure drop.







2019, 38(8): 1270-1275.
doi: 10.13433/j.cnki.1003-8728.20190110
Abstract:
In order to solve the complex error factors and further improve the precision of the coordinate measuring machine with flexible arm, the measurement error factors are analyzed and the dynamic errors are studied. A dynamic error compensation method of coordinate measuring machine with flexible arm is proposed based on simulated annealing and neural network. The BP neural network is used to establish a dynamic error compensation model, and the simulated annealing algorithm is used to optimize the weight to solve the problem of slow convergence of the neural network. The data samples are obtained through experiments, and the test data is trained to compensate the error. Comparing with the BP neural network model, the results show that the single point repeatability measurement error is improved by 60.85%, and the accuracy of the length measurement error is improved by 54.79%, which proves the validity and feasibility of the proposed method.
In order to solve the complex error factors and further improve the precision of the coordinate measuring machine with flexible arm, the measurement error factors are analyzed and the dynamic errors are studied. A dynamic error compensation method of coordinate measuring machine with flexible arm is proposed based on simulated annealing and neural network. The BP neural network is used to establish a dynamic error compensation model, and the simulated annealing algorithm is used to optimize the weight to solve the problem of slow convergence of the neural network. The data samples are obtained through experiments, and the test data is trained to compensate the error. Comparing with the BP neural network model, the results show that the single point repeatability measurement error is improved by 60.85%, and the accuracy of the length measurement error is improved by 54.79%, which proves the validity and feasibility of the proposed method.






2019, 38(8): 1276-1281.
doi: 10.13433/j.cnki.1003-8728.20180306
Abstract:
The aeronautical ducts are important parts of the aeronautical pipeline system. To check the quality of the ducts, it is necessary to measure the ducts to obtain their geometrical parameters. In order to derive the geometrical parameters of the ducts, a space cylinder fitting algorithm is required for the measuring points. At present, the existing cylindrical fitting algorithm needs dense point cloud, and sometimes only sparse measurement points can be obtained because of limited measurement time and adverse environment. Too few measuring points affect the precision of cylinder fitting and lead to inaccuracy of geometric parameters of ducts. To solve this problem, a cylindrical fitting algorithm is proposed to select the initial value for cylinders fitting by calculating the roundness of point cloud projection points. The algorithm first projects the collected point cloud onto a set of plane whose normal vectors are all unit vectors, and then the projection points are fitted into a circle and its roundness is calculated. Then the unit vector with the best roundness is used as a fitting cylinder axis, and the corresponding circle center and radius of the projected circle are used as the initial value of the cylinder center and the radius of the cylinder. Finally, the gradient descent method is used to fit the cylinder. The experimental results show that the proposed algorithm can accurately fit cylinders without a large amount of measurement data, and can be used to obtain the geometrical parameters of aeronautical ducts.
The aeronautical ducts are important parts of the aeronautical pipeline system. To check the quality of the ducts, it is necessary to measure the ducts to obtain their geometrical parameters. In order to derive the geometrical parameters of the ducts, a space cylinder fitting algorithm is required for the measuring points. At present, the existing cylindrical fitting algorithm needs dense point cloud, and sometimes only sparse measurement points can be obtained because of limited measurement time and adverse environment. Too few measuring points affect the precision of cylinder fitting and lead to inaccuracy of geometric parameters of ducts. To solve this problem, a cylindrical fitting algorithm is proposed to select the initial value for cylinders fitting by calculating the roundness of point cloud projection points. The algorithm first projects the collected point cloud onto a set of plane whose normal vectors are all unit vectors, and then the projection points are fitted into a circle and its roundness is calculated. Then the unit vector with the best roundness is used as a fitting cylinder axis, and the corresponding circle center and radius of the projected circle are used as the initial value of the cylinder center and the radius of the cylinder. Finally, the gradient descent method is used to fit the cylinder. The experimental results show that the proposed algorithm can accurately fit cylinders without a large amount of measurement data, and can be used to obtain the geometrical parameters of aeronautical ducts.








2019, 38(8): 1282-1288.
doi: 10.13433/j.cnki.1003-8728.20180307
Abstract:
Due to the severe shoulder wear and tear during the operation of Chongqing straddle monorail train, a series of security, environmental and economy problems were aroused. In this paper, to explore the mechanism of the shoulder wear, a finite element model of the running wheel tire was built with ABAQUS software, and the validity of the modeling method was verified by tire modal test. The relationship between operating modes of running wheel tire and its shoulder wear was investigated based on the finite element model. According to the relationship between tire structure and vibration mode, a method of controlling tire deviation of running wheel by modifying tire's structural parameters was put forward. The analysis results showed that the difference between forward and backward traveling waves of the running wheel tire could be reduced by changing the elastic modulus of tire's zero-degree band beam reasonably, and the shoulder wear of the straddle monorail wheel can be effectively reduced.
Due to the severe shoulder wear and tear during the operation of Chongqing straddle monorail train, a series of security, environmental and economy problems were aroused. In this paper, to explore the mechanism of the shoulder wear, a finite element model of the running wheel tire was built with ABAQUS software, and the validity of the modeling method was verified by tire modal test. The relationship between operating modes of running wheel tire and its shoulder wear was investigated based on the finite element model. According to the relationship between tire structure and vibration mode, a method of controlling tire deviation of running wheel by modifying tire's structural parameters was put forward. The analysis results showed that the difference between forward and backward traveling waves of the running wheel tire could be reduced by changing the elastic modulus of tire's zero-degree band beam reasonably, and the shoulder wear of the straddle monorail wheel can be effectively reduced.









2019, 38(8): 1289-1295.
doi: 10.13433/j.cnki.1003-8728.20180295
Abstract:
A ship's foundation often works in a high-temperature environment, however, its design does not consider the influence of temperature. In this paper, the power flow calculation is realized through our new development of the ABAQUS software. Using power flow as an evaluation index, different excitation schemes were used to study the foundation under different temperature, bracket thickness and bracket spacing. The results show that the bracket thickness and the bracket spacing have inconsistent effects on the longitudinal power flow of the foundation at each order natural frequency; increasing temperature at high-order natural frequency changes the trend effect of the bracket thickness on the power flow; increasing temperature at high-order natural frequency intensifies fluctuations in power flow and makes the power flow change more complicated.
A ship's foundation often works in a high-temperature environment, however, its design does not consider the influence of temperature. In this paper, the power flow calculation is realized through our new development of the ABAQUS software. Using power flow as an evaluation index, different excitation schemes were used to study the foundation under different temperature, bracket thickness and bracket spacing. The results show that the bracket thickness and the bracket spacing have inconsistent effects on the longitudinal power flow of the foundation at each order natural frequency; increasing temperature at high-order natural frequency changes the trend effect of the bracket thickness on the power flow; increasing temperature at high-order natural frequency intensifies fluctuations in power flow and makes the power flow change more complicated.








2019, 38(8): 1296-1300.
doi: 10.13433/j.cnki.1003-8728.20180310
Abstract:
The weaved ceramic matrix composites are difficult to characterize the interface mechanical properties due to the complex fiber braid structure. In order to investigate the interface mechanical properties of braided composites and explore the interface failure mechanism under stress, a one-way model composite was designed and fabricated, and the microstructure-nano experiment of single fiber extrusion was carried out. The results show that when adopting PyC interface in C/SiC, the interfacial shear strength is about 35MPa. Through the analysis of the fiber extrusion process, the crack initiation and propagation law under load is revealed. The present results not only have important economic significance for applying composite materials, but also provides theoretical and experimental support for studying interface mechanics and fracture mechanics of composite materials.
The weaved ceramic matrix composites are difficult to characterize the interface mechanical properties due to the complex fiber braid structure. In order to investigate the interface mechanical properties of braided composites and explore the interface failure mechanism under stress, a one-way model composite was designed and fabricated, and the microstructure-nano experiment of single fiber extrusion was carried out. The results show that when adopting PyC interface in C/SiC, the interfacial shear strength is about 35MPa. Through the analysis of the fiber extrusion process, the crack initiation and propagation law under load is revealed. The present results not only have important economic significance for applying composite materials, but also provides theoretical and experimental support for studying interface mechanics and fracture mechanics of composite materials.






2019, 38(8): 1301-1306.
doi: 10.13433/j.cnki.1003-8728.20180313
Abstract:
The efficiency and noise of aero-engine have always been the focus of attention. Compressor is an important component in aero-engine. The trailing edge structure of compressor blade has a great influence on its wake characteristics. For this purpose, a typical triangular saw tooth model is established for the trailing edge of an axial compressor blade. The 3D turbulent flow field information in the wake region of a saw tooth trailing edge blade is simulated by using Fluent software. The wake flow characteristics and sound field characteristics of a saw tooth trailing edge blade with different sizes are compared with those of a saw tooth trailing edge blade without saw tooth trailing edge. The mechanism of flow loss and the mechanism of noise reduction are also discussed. It is found that the flow through the saw tooth trailing edge flows from the pressure surface to the suction surface through the saw tooth slot, and the energy compensation is given to the wake region to reduce the speed loss and total pressure loss of the wake. Eddy energy diffusion can reduce the trailing edge noise, and there is an optimum tooth height in the case of a certain tooth width, which makes the effect of the reducing flow loss and noise be best.
The efficiency and noise of aero-engine have always been the focus of attention. Compressor is an important component in aero-engine. The trailing edge structure of compressor blade has a great influence on its wake characteristics. For this purpose, a typical triangular saw tooth model is established for the trailing edge of an axial compressor blade. The 3D turbulent flow field information in the wake region of a saw tooth trailing edge blade is simulated by using Fluent software. The wake flow characteristics and sound field characteristics of a saw tooth trailing edge blade with different sizes are compared with those of a saw tooth trailing edge blade without saw tooth trailing edge. The mechanism of flow loss and the mechanism of noise reduction are also discussed. It is found that the flow through the saw tooth trailing edge flows from the pressure surface to the suction surface through the saw tooth slot, and the energy compensation is given to the wake region to reduce the speed loss and total pressure loss of the wake. Eddy energy diffusion can reduce the trailing edge noise, and there is an optimum tooth height in the case of a certain tooth width, which makes the effect of the reducing flow loss and noise be best.












2019, 38(8): 1307-1312.
doi: 10.13433/j.cnki.1003-8728.20180294
Abstract:
The research on the dynamic characteristics of the Arresting hook buffer for carrier-based aircraft is carried out. The dynamic mechanical characteristics of the arresting hook absorber for the carrier-based aircraft and the test method for the impact performance of the blocking hook system are put forward. The experimental system is set up and the vertical impact test of arresting hook system is carried out, revealing the changing law of the damping force of the arrester bumper with the stroke. The results show that when the initial filling pressure of the damper is small, it is not conducive to arresting the hook smoothly. By improving the initial gas pressure of the damper, the stopping performance of the arresting hook can be effectively improved, and the blocking hook can be hung smoothly. The dynamic damping characteristic curve of shock absorber was introduced into the analysis model of longitudinal motion of arresting hook under impact condition. The calculation results of rebound height of arresting hook are compared with the experimental data. The results show that the curve of rebound height reflects the motion of barricade. The results show that the calculated results are larger than the test results in both the bouncing height and the bounce time. Finally, the reasons for the calculation error were analyzed and explained.
The research on the dynamic characteristics of the Arresting hook buffer for carrier-based aircraft is carried out. The dynamic mechanical characteristics of the arresting hook absorber for the carrier-based aircraft and the test method for the impact performance of the blocking hook system are put forward. The experimental system is set up and the vertical impact test of arresting hook system is carried out, revealing the changing law of the damping force of the arrester bumper with the stroke. The results show that when the initial filling pressure of the damper is small, it is not conducive to arresting the hook smoothly. By improving the initial gas pressure of the damper, the stopping performance of the arresting hook can be effectively improved, and the blocking hook can be hung smoothly. The dynamic damping characteristic curve of shock absorber was introduced into the analysis model of longitudinal motion of arresting hook under impact condition. The calculation results of rebound height of arresting hook are compared with the experimental data. The results show that the curve of rebound height reflects the motion of barricade. The results show that the calculated results are larger than the test results in both the bouncing height and the bounce time. Finally, the reasons for the calculation error were analyzed and explained.










