


 Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2023 Vol. 42, No. 9
Display Method:
2023, 42(9): 1373-1380.
doi: 10.13433/j.cnki.1003-8728.20220112
 PDF 523KB
PDF 523KB
Abstract:
Soft actuators are the core component of intelligent and interactive soft robot, which provide the ability of deformation, manipulation and movement for the robot. Due to its high flexibility, good adaptability and safe interactivity and other characteristics, it is widely used in industry, agriculture, medical, rescue and service fields. With the in-depth study on the biomimetic mechanism, various soft actuators through biological imitationareinnovated. According to the research results of soft actuators in recent years, firstly, the basic research and development status of soft actuators technology in soft robots at home and abroad are briefly introduced;Secondly, according to the characteristics of soft actuators, it summarizes and classifies them, focuses on the basic working principles of various types of software drivers, and introduces in detail the application status of various software drivers in software robot, as well as the advantages and disadvantages of various drivers and the problems existing in practical application;Finally, the future development trend of soft actuators are prospected.
Soft actuators are the core component of intelligent and interactive soft robot, which provide the ability of deformation, manipulation and movement for the robot. Due to its high flexibility, good adaptability and safe interactivity and other characteristics, it is widely used in industry, agriculture, medical, rescue and service fields. With the in-depth study on the biomimetic mechanism, various soft actuators through biological imitationareinnovated. According to the research results of soft actuators in recent years, firstly, the basic research and development status of soft actuators technology in soft robots at home and abroad are briefly introduced;Secondly, according to the characteristics of soft actuators, it summarizes and classifies them, focuses on the basic working principles of various types of software drivers, and introduces in detail the application status of various software drivers in software robot, as well as the advantages and disadvantages of various drivers and the problems existing in practical application;Finally, the future development trend of soft actuators are prospected.














2023, 42(9): 1381-1391.
doi: 10.13433/j.cnki.1003-8728.20220092
Abstract:
For vectorial propulsion economically and efficiently to improve the maneuverability of AUV, a novel AUV with vector propulsion was proposed. The propulsion system of the robot formed by two reconfigurable magnetic coupling thrusters. Each thruster has the vector reconstruction capability of two DOFs, which makes it more maneuverable and flexible than the traditional underwater vehicles. The motion planning of the robot is completed by establishing the propulsion system model, and the dynamic performance of the robot is evaluated with force measuring device. Then, the motion control experiments of the robot with multiple degrees of freedom, such as forward motion, yaw motion, heave motion and diving motion, were carried out. The experimental results show that the robot can efficiently realize the movement of multiple degrees of freedom, and the new reconfigurable magnetic coupling thrusters can stably provide vector thrust, which verifies the feasibility of the design scheme.
For vectorial propulsion economically and efficiently to improve the maneuverability of AUV, a novel AUV with vector propulsion was proposed. The propulsion system of the robot formed by two reconfigurable magnetic coupling thrusters. Each thruster has the vector reconstruction capability of two DOFs, which makes it more maneuverable and flexible than the traditional underwater vehicles. The motion planning of the robot is completed by establishing the propulsion system model, and the dynamic performance of the robot is evaluated with force measuring device. Then, the motion control experiments of the robot with multiple degrees of freedom, such as forward motion, yaw motion, heave motion and diving motion, were carried out. The experimental results show that the robot can efficiently realize the movement of multiple degrees of freedom, and the new reconfigurable magnetic coupling thrusters can stably provide vector thrust, which verifies the feasibility of the design scheme.

























2023, 42(9): 1392-1401.
doi: 10.13433/j.cnki.1003-8728.20220114
Abstract:
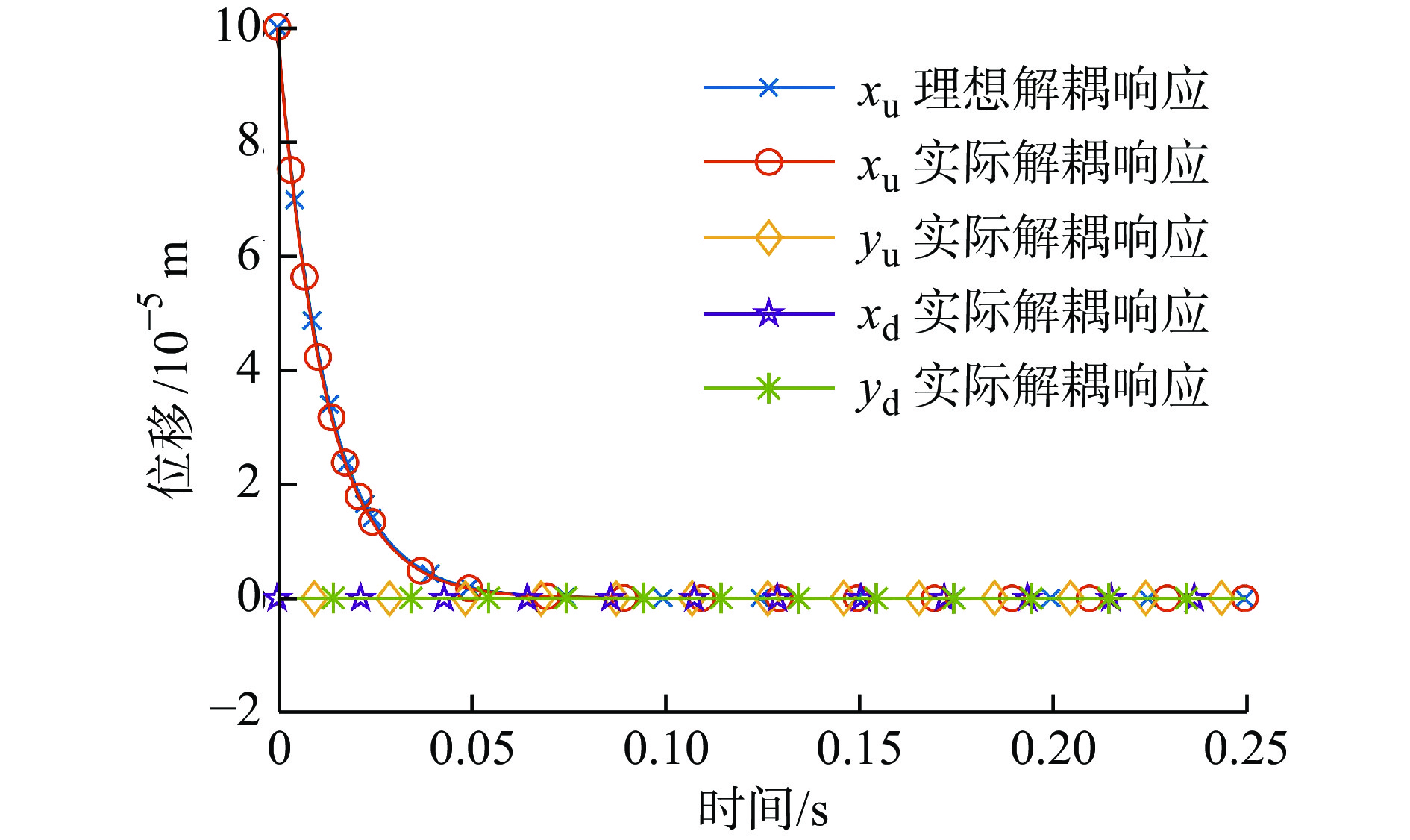
The high-speed maglev flywheel supported by nonlinear force shows strong coupling dynamics, which affects the stability of the rotor-bearing system. Therefore, a four-DOF dynamic model of nonlinear magnetic force-rigid rotor was established, and an adaptive radial basis neural network and sliding mode control algorithm (adaptive RBFNN&SMC) was proposed. The nonlinear force and gyro effect was integrally compensated by the RBFNN. The hyperbolic tangent function was used as the sliding mode robust term to improve the sliding mode control, reduce the chattering of the sliding mode algorithm and suppress the mass imbalance disturbance and random disturbance. A comparation of PID, α-order inverse system and the proposed algorithm was simulated. The results shows that the algorithm proposed can effectively compensate the nonlinear force, decouple the system and improve the chattering problem. At the same time, it can suppresses the external disturbance efficiently.
The high-speed maglev flywheel supported by nonlinear force shows strong coupling dynamics, which affects the stability of the rotor-bearing system. Therefore, a four-DOF dynamic model of nonlinear magnetic force-rigid rotor was established, and an adaptive radial basis neural network and sliding mode control algorithm (adaptive RBFNN&SMC) was proposed. The nonlinear force and gyro effect was integrally compensated by the RBFNN. The hyperbolic tangent function was used as the sliding mode robust term to improve the sliding mode control, reduce the chattering of the sliding mode algorithm and suppress the mass imbalance disturbance and random disturbance. A comparation of PID, α-order inverse system and the proposed algorithm was simulated. The results shows that the algorithm proposed can effectively compensate the nonlinear force, decouple the system and improve the chattering problem. At the same time, it can suppresses the external disturbance efficiently.





















2023, 42(9): 1402-1408.
doi: 10.13433/j.cnki.1003-8728.20220113
Abstract:
In view of the defects of the current complex graphics processing, such as too much empty travel between machining paths, resulting in a long time-consuming machining process, a simple and easy to realize machining path switching optimization method was proposed. The switching control method of complex graphics machining path was analyzed, and the optimization idea of shortening the total empty stroke was given. A bidirectional max min ant colony system (BMMAS) was derived based on the principle of bidirectional ant colony algorithm. Combined with the characteristics of trajectory switching between machining trajectories, the machining process path of complex graphics was planned and designed, and the implementation process of the algorithm and the key points of machining process path optimization was given. Finally, the method was used to optimized the machining of plane complex graphics. The experimental results showed that this machining method has the advantages of simple calculation, high machining efficiency, less empty stroke path length and stable machining. The research results have reference value for similar complex graphics processing.
In view of the defects of the current complex graphics processing, such as too much empty travel between machining paths, resulting in a long time-consuming machining process, a simple and easy to realize machining path switching optimization method was proposed. The switching control method of complex graphics machining path was analyzed, and the optimization idea of shortening the total empty stroke was given. A bidirectional max min ant colony system (BMMAS) was derived based on the principle of bidirectional ant colony algorithm. Combined with the characteristics of trajectory switching between machining trajectories, the machining process path of complex graphics was planned and designed, and the implementation process of the algorithm and the key points of machining process path optimization was given. Finally, the method was used to optimized the machining of plane complex graphics. The experimental results showed that this machining method has the advantages of simple calculation, high machining efficiency, less empty stroke path length and stable machining. The research results have reference value for similar complex graphics processing.








2023, 42(9): 1409-1415.
doi: 10.13433/j.cnki.1003-8728.20220111
Abstract:
Aiming at the influence of nonlinear characteristics of pantograph on the performance of pantograph-catenary system (PCS), a multi-body pantograph-catenary coupling dynamics model is established based on Laplace transform and numerical methods. First, the influence of multi-body pantograph parameters on pantograph amplitude-frequency characteristics is analysed,and based on the analysis results, a strategy to reduce contact pressure fluctuations is proposed. Then, a Taylor expansion of the nonlinear motionequations of the pantograph is carried out near the equilibrium position to obtain an equivalent model. The effects of different pantograph parameters on the contact pressure are compared, and it is found that the bow head stiffness and frame mass are the most sensitive among all parameters, and single variable matching and multivariate matching are carried out, and the comparison finds that the optimal parameters obtained by multivariate matching effect are more realistic. Finally, Matlab numerical simulation is carried out, the simulation results show that the pantograph contact pressure fluctuation is significantly reduced and the current quality is significantly improved after parameter optimization.
Aiming at the influence of nonlinear characteristics of pantograph on the performance of pantograph-catenary system (PCS), a multi-body pantograph-catenary coupling dynamics model is established based on Laplace transform and numerical methods. First, the influence of multi-body pantograph parameters on pantograph amplitude-frequency characteristics is analysed,and based on the analysis results, a strategy to reduce contact pressure fluctuations is proposed. Then, a Taylor expansion of the nonlinear motionequations of the pantograph is carried out near the equilibrium position to obtain an equivalent model. The effects of different pantograph parameters on the contact pressure are compared, and it is found that the bow head stiffness and frame mass are the most sensitive among all parameters, and single variable matching and multivariate matching are carried out, and the comparison finds that the optimal parameters obtained by multivariate matching effect are more realistic. Finally, Matlab numerical simulation is carried out, the simulation results show that the pantograph contact pressure fluctuation is significantly reduced and the current quality is significantly improved after parameter optimization.








2023, 42(9): 1416-1422.
doi: 10.13433/j.cnki.1003-8728.20220101
Abstract:
The bolted joints interface exhibits the obvious variable amplitude damping and stiffness softening characteristics under the tangential loading. In order to study the changes in stiffness and damping, a hysteretic nonlinear model for the bolted joint must be established. Based on the Iwan model, the positive pressure generated by the pre-tightening force is converted into a function of the tangential force of the bolted joint interface. The tangential load model and hysteresis loops theoretical model for the bolted joint interface are established. Then through the comparison with the existing experiments, the correctness of the loading curve and hysteresis loop is verified. It is proved that the model can be used to analyze the bolted joint performance under different conditions.The results show that the critical tangential displacement and initial stiffness have significant effects on the change of hysteresis loops, and the effect of the residual stiffness on the hysteresis behavior is reflected in the macroscopic slip stage. Through the present model, the complex nonlinear characteristics of the bolted joints, the hysteresis phenomenon and the stiffness softening phenomenon of the joint interface can be accurately expressed.
The bolted joints interface exhibits the obvious variable amplitude damping and stiffness softening characteristics under the tangential loading. In order to study the changes in stiffness and damping, a hysteretic nonlinear model for the bolted joint must be established. Based on the Iwan model, the positive pressure generated by the pre-tightening force is converted into a function of the tangential force of the bolted joint interface. The tangential load model and hysteresis loops theoretical model for the bolted joint interface are established. Then through the comparison with the existing experiments, the correctness of the loading curve and hysteresis loop is verified. It is proved that the model can be used to analyze the bolted joint performance under different conditions.The results show that the critical tangential displacement and initial stiffness have significant effects on the change of hysteresis loops, and the effect of the residual stiffness on the hysteresis behavior is reflected in the macroscopic slip stage. Through the present model, the complex nonlinear characteristics of the bolted joints, the hysteresis phenomenon and the stiffness softening phenomenon of the joint interface can be accurately expressed.











2023, 42(9): 1423-1429.
doi: 10.13433/j.cnki.1003-8728.20220231
Abstract:
Aiming at the problem that the currently established robot spraying model has weak ability to analyze and fit complex data, this paper deeply studied and analyzed the robot spraying deposition thickness model based on the spraying film deposition mechanism. Based on the static spraying thickness modeling method, an elliptical double Gaussian sum model was proposed, and the distribution law of dynamic coating thickness was studied by using single channel thickness modeling method and multi-channel thickness modeling method. The parameters of the model were analyzed and solved through the spraying test, and then the static spraying film thickness distribution was established based on the model. The effectiveness and practicability of the model were further confirmed by the comparison between the experimental results and the theoretical data.
Aiming at the problem that the currently established robot spraying model has weak ability to analyze and fit complex data, this paper deeply studied and analyzed the robot spraying deposition thickness model based on the spraying film deposition mechanism. Based on the static spraying thickness modeling method, an elliptical double Gaussian sum model was proposed, and the distribution law of dynamic coating thickness was studied by using single channel thickness modeling method and multi-channel thickness modeling method. The parameters of the model were analyzed and solved through the spraying test, and then the static spraying film thickness distribution was established based on the model. The effectiveness and practicability of the model were further confirmed by the comparison between the experimental results and the theoretical data.










2023, 42(9): 1430-1435.
doi: 10.13433/j.cnki.1003-8728.20220071
Abstract:
Aiming at the grinding process of the shape of chip groove of rough milling cutter, this paper defined the structural parameters of chip groove of peripheral teeth of rough milling cutter, and established the machining coordinate system and cutting depth guide curve equations. And with the theory of kinematics, the calculation method of grinding attitude and grinding track of grinding wheel was put forward. Finally, a set of algorithm modules was developed in VC + + environment, which was verified by simulation and compared with the simulation results of Numroto grinding software. The results show that the trajectory algorithm can achieve the desired effect well, and has better tool structure extensibility and machining accuracy.
Aiming at the grinding process of the shape of chip groove of rough milling cutter, this paper defined the structural parameters of chip groove of peripheral teeth of rough milling cutter, and established the machining coordinate system and cutting depth guide curve equations. And with the theory of kinematics, the calculation method of grinding attitude and grinding track of grinding wheel was put forward. Finally, a set of algorithm modules was developed in VC + + environment, which was verified by simulation and compared with the simulation results of Numroto grinding software. The results show that the trajectory algorithm can achieve the desired effect well, and has better tool structure extensibility and machining accuracy.











2023, 42(9): 1436-1444.
doi: 10.13433/j.cnki.1003-8728.20220078
Abstract:
To solve the problems that feature recognition technology are the lack of product manufacturing information recognition and the complexity of matching algorithm, an automatic feature information recognition algorithm based on MBD (Model-based definition) model is proposed. Firstly, a STEP file parser is built to parse the MBD model information through the Express and Java mappings. Secondly, a geometric feature recognition algorithm based on graph and hint was established. The representation surface adjacency graph was used as the data structure of the matching algorithm, and the hint was used to search and match the predefined library. Then, the recognition algorithm of product manufacturing information based on the relational tree is proposed to recognize product manufacturing information. Finally, the shaft and the casing were taken as test objects to verify the proposed method with the IntelliJ IDEA platform, and the time complexity of the matching algorithm was analyzed. The results show that this method can recognize the geometric feature information and the product manufacturing information. The time complexity of the recognition algorithm is O(n), being better than that of the traditional matching algorithm, which is O(n2).
To solve the problems that feature recognition technology are the lack of product manufacturing information recognition and the complexity of matching algorithm, an automatic feature information recognition algorithm based on MBD (Model-based definition) model is proposed. Firstly, a STEP file parser is built to parse the MBD model information through the Express and Java mappings. Secondly, a geometric feature recognition algorithm based on graph and hint was established. The representation surface adjacency graph was used as the data structure of the matching algorithm, and the hint was used to search and match the predefined library. Then, the recognition algorithm of product manufacturing information based on the relational tree is proposed to recognize product manufacturing information. Finally, the shaft and the casing were taken as test objects to verify the proposed method with the IntelliJ IDEA platform, and the time complexity of the matching algorithm was analyzed. The results show that this method can recognize the geometric feature information and the product manufacturing information. The time complexity of the recognition algorithm is O(n), being better than that of the traditional matching algorithm, which is O(n2).















2023, 42(9): 1445-1454.
doi: 10.13433/j.cnki.1003-8728.20220095
Abstract:
Aiming at the low detection and localization rate and slow speed of industrial robots to workpiece in assembly line processing environment, an improved EfficientDet neural network model for workpiece detection is proposed. EfficientNet was adopted as the backbone feature extraction network, Triplet Attention mechanism is used to replace the original squeeze-and-excitation (SE) Attention mechanism, and the recursive-efficient bidirectional cross-scale connections and weighted feature fusion cyclic feature merge network structure is used for reference of cyclic feature merge idea. To solve the unequal positive and negative samples, generalized focal loss is used to improve the original focal loss function. Considering the specific production environment of machining, histogram equalization is used to improve the contrast of data. Finally, the model was trained and established with an industrial camera. The improved model EfficientDet improved by 6.1% comparing with the original one in a complex industrial production situation, and its speed increased to 72 frames perframes per second. The experimental results show that the algorithm can quickly and accurately locate the workpiece in the production environment, which provides a new solution for the actual production needs.
Aiming at the low detection and localization rate and slow speed of industrial robots to workpiece in assembly line processing environment, an improved EfficientDet neural network model for workpiece detection is proposed. EfficientNet was adopted as the backbone feature extraction network, Triplet Attention mechanism is used to replace the original squeeze-and-excitation (SE) Attention mechanism, and the recursive-efficient bidirectional cross-scale connections and weighted feature fusion cyclic feature merge network structure is used for reference of cyclic feature merge idea. To solve the unequal positive and negative samples, generalized focal loss is used to improve the original focal loss function. Considering the specific production environment of machining, histogram equalization is used to improve the contrast of data. Finally, the model was trained and established with an industrial camera. The improved model EfficientDet improved by 6.1% comparing with the original one in a complex industrial production situation, and its speed increased to 72 frames perframes per second. The experimental results show that the algorithm can quickly and accurately locate the workpiece in the production environment, which provides a new solution for the actual production needs.

















2023, 42(9): 1455-1466.
doi: 10.13433/j.cnki.1003-8728.20220100
Abstract:
The finite element analysis software ABAQUS was developed based on Python, by combining with the characteristics of cold roll-beating forming, the parametric modeling plug-in of finite element model for cold roll-beating formingwas established. The plug-in can be used to easily change the geometric model for rolling wheel and workpiece, complex material property, rolling depth, revolution speed and feed speed and other process parameters of parametric modeling, and realize the parameterization of the finite element simulation modelfor cold roll-beating forming, so as to automatically complete the geometric modeling, mesh, material property definition to submit a series of pre-processing process. Finally, the plug-in was used in finite element simulation, and the experiment of cold roll-beating forming is carried out. Through the comparative analysis of the simulated force, tooth profile and experiments under different parameters, the results show that the simulated force and tooth profile have the same variation with the experimental results, and the errors are below 6%, the feasibility and effectiveness of the plug-in used to establish the finite element model for cold roll-beating formingwere verified.
The finite element analysis software ABAQUS was developed based on Python, by combining with the characteristics of cold roll-beating forming, the parametric modeling plug-in of finite element model for cold roll-beating formingwas established. The plug-in can be used to easily change the geometric model for rolling wheel and workpiece, complex material property, rolling depth, revolution speed and feed speed and other process parameters of parametric modeling, and realize the parameterization of the finite element simulation modelfor cold roll-beating forming, so as to automatically complete the geometric modeling, mesh, material property definition to submit a series of pre-processing process. Finally, the plug-in was used in finite element simulation, and the experiment of cold roll-beating forming is carried out. Through the comparative analysis of the simulated force, tooth profile and experiments under different parameters, the results show that the simulated force and tooth profile have the same variation with the experimental results, and the errors are below 6%, the feasibility and effectiveness of the plug-in used to establish the finite element model for cold roll-beating formingwere verified.
























2023, 42(9): 1467-1473.
doi: 10.13433/j.cnki.1003-8728.20220091
Abstract:
At present, the construction method of functionally graded material model is not mature, and it is still necessary to establish a new algorithm to add the material composition of functionally graded material to path planning to realize the mapping from material space to geometric space. Visual Studio 2019 was used as the development platform and OpenGL for visual analysis. The printing path was voxelized, the material composition was designed and calculated, and mapped to geometric coordinates to construct a target model with continuous gradient variation. A new type of G-code with geometric information and material information was generated and used for accurate 3D printing of functionally graded materials. The results show that the gradient change of the material model can be accurately controlled by using the method of path voxel.
At present, the construction method of functionally graded material model is not mature, and it is still necessary to establish a new algorithm to add the material composition of functionally graded material to path planning to realize the mapping from material space to geometric space. Visual Studio 2019 was used as the development platform and OpenGL for visual analysis. The printing path was voxelized, the material composition was designed and calculated, and mapped to geometric coordinates to construct a target model with continuous gradient variation. A new type of G-code with geometric information and material information was generated and used for accurate 3D printing of functionally graded materials. The results show that the gradient change of the material model can be accurately controlled by using the method of path voxel.









2023, 42(9): 1474-1481.
doi: 10.13433/j.cnki.1003-8728.20220093
Abstract:
For the welding seam deviation recognition in GMAW welding of medium thickness plates, a weld seam deviation recognition method in GMAW swing welding of medium thickness plates based on arc sound signal is proposed. In V-groove swing welding, it is found that when the swing center deviates from the weld center, the arc sound signal presents obvious asymmetry. Therefore, the characteristics of arc sound signal in time domain and frequency domain were further studied, and the characteristic parameters, in which the energy difference of arc sound swing limit position, standard deviation, energy in the seventh and eighth band of wavelet packet were closely related to the weld seam deviation signal, were identified. The GS-SVR nonlinear regression equation based on the above four parameters was established. Through the detection of arc sound signal, the welding deviation information in the welding could be recognized online. The left and right deviation tests show that the model has good accuracy and can meet the requirement of production.
For the welding seam deviation recognition in GMAW welding of medium thickness plates, a weld seam deviation recognition method in GMAW swing welding of medium thickness plates based on arc sound signal is proposed. In V-groove swing welding, it is found that when the swing center deviates from the weld center, the arc sound signal presents obvious asymmetry. Therefore, the characteristics of arc sound signal in time domain and frequency domain were further studied, and the characteristic parameters, in which the energy difference of arc sound swing limit position, standard deviation, energy in the seventh and eighth band of wavelet packet were closely related to the weld seam deviation signal, were identified. The GS-SVR nonlinear regression equation based on the above four parameters was established. Through the detection of arc sound signal, the welding deviation information in the welding could be recognized online. The left and right deviation tests show that the model has good accuracy and can meet the requirement of production.












2023, 42(9): 1482-1489.
doi: 10.13433/j.cnki.1003-8728.20220043
Abstract:
Rolling bearing is a key component in engineering equipment, the research on fault identification method of rolling bearings is of great significance. In order to solve the problem of weak ability of rolling bearing vibration signal analysis, a rolling bearing fault identification method based on variational mode decomposition (VMD) and least square support vector machine (LSSVM) is proposed. Taking the rolling bearing experimental data of Case Western Reserve University as the research object, the experimental vibration data of four types of faults and seven rolling bearing states are obtained. VMD decomposition is carried out to obtain the number 4 of the best decomposed intrinsic mode function (IMF), and then the four IMF sample entropy (SE) is calculated to obtain the corresponding feature quantity, which is input into the LSSVM model for state recognition. Experiments show that the proposed method based on VMD-LSSVM has higher recognition rate than EMD (empirical mode decomposition) - HMM (Hidden Markov model) and EMD-LSSVM.
Rolling bearing is a key component in engineering equipment, the research on fault identification method of rolling bearings is of great significance. In order to solve the problem of weak ability of rolling bearing vibration signal analysis, a rolling bearing fault identification method based on variational mode decomposition (VMD) and least square support vector machine (LSSVM) is proposed. Taking the rolling bearing experimental data of Case Western Reserve University as the research object, the experimental vibration data of four types of faults and seven rolling bearing states are obtained. VMD decomposition is carried out to obtain the number 4 of the best decomposed intrinsic mode function (IMF), and then the four IMF sample entropy (SE) is calculated to obtain the corresponding feature quantity, which is input into the LSSVM model for state recognition. Experiments show that the proposed method based on VMD-LSSVM has higher recognition rate than EMD (empirical mode decomposition) - HMM (Hidden Markov model) and EMD-LSSVM.














2023, 42(9): 1490-1501.
doi: 10.13433/j.cnki.1003-8728.20220097
Abstract:
In order to effectively solve the optimization problem of SVM kernel parameters, a gray wolf optimization algorithm (FGWO) based on Fuch chaos strategy and nonlinear convergence factor is proposed in this paper. This method introduces Fuch chaos reverse learning strategy, dynamic nonlinear control parameters, dual weight factor strategy and survival of the fittest selection strategy, respectively in the three stages of the algorithm. The purpose is to provide a new mechanism for balancing the performance of global exploration and local development, and to enhance the convergence speed and accuracy of the algorithm. Secondly, using FGWO as a new strategy, FGWO-SVM classification model is constructed to realize the identification of surface defects of aluminum castings. In order to verify the performance of the algorithm, on the basis of 10 standard test functions, the FGWO algorithmof this paper is compared with other algorithms. The results show that FGWO can effectively solve the function optimization problem, andwhenthe FGWO-SVM model is applied to the defect recognition problem,its average recognition rate of the defect type is 96.6%, which is better than other classifiers.
In order to effectively solve the optimization problem of SVM kernel parameters, a gray wolf optimization algorithm (FGWO) based on Fuch chaos strategy and nonlinear convergence factor is proposed in this paper. This method introduces Fuch chaos reverse learning strategy, dynamic nonlinear control parameters, dual weight factor strategy and survival of the fittest selection strategy, respectively in the three stages of the algorithm. The purpose is to provide a new mechanism for balancing the performance of global exploration and local development, and to enhance the convergence speed and accuracy of the algorithm. Secondly, using FGWO as a new strategy, FGWO-SVM classification model is constructed to realize the identification of surface defects of aluminum castings. In order to verify the performance of the algorithm, on the basis of 10 standard test functions, the FGWO algorithmof this paper is compared with other algorithms. The results show that FGWO can effectively solve the function optimization problem, andwhenthe FGWO-SVM model is applied to the defect recognition problem,its average recognition rate of the defect type is 96.6%, which is better than other classifiers.





2023, 42(9): 1502-1507.
doi: 10.13433/j.cnki.1003-8728.20220109
Abstract:
For the aerodynamic noise of high-speed train pantograph region, large eddy simulation (LES) and FW-H acoustic model were used to simulate the aerodynamic noise of pantograph fairing at speeds of 250 km/h and 350 km/h, and the aerodynamic noise calculation model of train+pantograph fairing was established to analyze the dipole sound source distribution and aerodynamic noise spectrum characteristics of the pantograph fairing. The results show that the aerodynamic noise on the fairing surface is overall larger than 250 km/h at 350 km/h. The distribution of the dipole sound source on the surface of the fairing at the two speeds is consistent in the frequency domain: the sound pressure level at the high frequency is obviously lower than that at the low frequency, and the maximum sound pressure level at 5 000 Hz is only 40% of that at 20 Hz; The loudest pressure levels on the surface of the fairing are induced at the transition between the concave cavity and the rear guide surface, reaching 136 dB and 143 dB respectively at 20 Hz. In addition, the near-field and far-field aerodynamic noise spectrum curves of the fairing are similar, both of which are broadband noise, and the energy is mainly concentrated in the range of 150-950 Hz, which has certain practical reference significance for the structural design of the pantograph fairing and the selection of sound insulation materials for the subsequent higher-speed trains.
For the aerodynamic noise of high-speed train pantograph region, large eddy simulation (LES) and FW-H acoustic model were used to simulate the aerodynamic noise of pantograph fairing at speeds of 250 km/h and 350 km/h, and the aerodynamic noise calculation model of train+pantograph fairing was established to analyze the dipole sound source distribution and aerodynamic noise spectrum characteristics of the pantograph fairing. The results show that the aerodynamic noise on the fairing surface is overall larger than 250 km/h at 350 km/h. The distribution of the dipole sound source on the surface of the fairing at the two speeds is consistent in the frequency domain: the sound pressure level at the high frequency is obviously lower than that at the low frequency, and the maximum sound pressure level at 5 000 Hz is only 40% of that at 20 Hz; The loudest pressure levels on the surface of the fairing are induced at the transition between the concave cavity and the rear guide surface, reaching 136 dB and 143 dB respectively at 20 Hz. In addition, the near-field and far-field aerodynamic noise spectrum curves of the fairing are similar, both of which are broadband noise, and the energy is mainly concentrated in the range of 150-950 Hz, which has certain practical reference significance for the structural design of the pantograph fairing and the selection of sound insulation materials for the subsequent higher-speed trains.











2023, 42(9): 1508-1515.
doi: 10.13433/j.cnki.1003-8728.20220115
Abstract:
To reduce the sound radiation of rail wheel vibration, taking the dual S-type web wheels as the research object, 9 types 3D finite element models of urban rail wheels reflecting the wear and unequal thickness of the spokes have been established. Based on the finite element model, the natural frequencies and structural modes of the wheel in each vibration mode were obtained, and the sound power level response curves of different wheels were compared and analyzed to obtain sound radiation level of the wheels under different wear conditions and unequal thickness characteristics. The research results show that: compared with the initial active wheels, the peak sound power level of the wheels with unequal thickness on the upper part of the spoke plate is reduced by 13.82 dBA; as the tread wear deepens, the noise of the wheels increases gradually; the maximum sound power level of wheels with unequal thickness on the upper part of the spoke plate under different wear is less than that of the initial active wheels.
To reduce the sound radiation of rail wheel vibration, taking the dual S-type web wheels as the research object, 9 types 3D finite element models of urban rail wheels reflecting the wear and unequal thickness of the spokes have been established. Based on the finite element model, the natural frequencies and structural modes of the wheel in each vibration mode were obtained, and the sound power level response curves of different wheels were compared and analyzed to obtain sound radiation level of the wheels under different wear conditions and unequal thickness characteristics. The research results show that: compared with the initial active wheels, the peak sound power level of the wheels with unequal thickness on the upper part of the spoke plate is reduced by 13.82 dBA; as the tread wear deepens, the noise of the wheels increases gradually; the maximum sound power level of wheels with unequal thickness on the upper part of the spoke plate under different wear is less than that of the initial active wheels.
















2023, 42(9): 1516-1526.
doi: 10.13433/j.cnki.1003-8728.20220098
Abstract:
In order for the grey wolf optimization algorithm to solve the problem of local optimization and low efficiency in the path planning of a mobile robot, an improved grey wolf optimization algorithm for path planning on a feature grid map is proposed. First, we improve the grey wolf optimization algorithm, introduce regulation factors to regulate the global and local search of the algorithm according to specific requirements and dynamic weights and walking strategies to improve the convergence speed of the algorithm and the ability to avoid local optimization. Secondly, the new method of building a feature grid map is proposed, which speeds up the determination of feature grids. Finally, a long-distance feature grid and visible step size are proposed to simplify the establishment of an adjacency matrix. The simulation results show that the algorithm proposed in this paper has better results on standard test functions and path planning problem solutions than other algorithms. On this basis, the establishment of the feature grid map effectively speeds up the algorithm's speed for solving path planning problems.
In order for the grey wolf optimization algorithm to solve the problem of local optimization and low efficiency in the path planning of a mobile robot, an improved grey wolf optimization algorithm for path planning on a feature grid map is proposed. First, we improve the grey wolf optimization algorithm, introduce regulation factors to regulate the global and local search of the algorithm according to specific requirements and dynamic weights and walking strategies to improve the convergence speed of the algorithm and the ability to avoid local optimization. Secondly, the new method of building a feature grid map is proposed, which speeds up the determination of feature grids. Finally, a long-distance feature grid and visible step size are proposed to simplify the establishment of an adjacency matrix. The simulation results show that the algorithm proposed in this paper has better results on standard test functions and path planning problem solutions than other algorithms. On this basis, the establishment of the feature grid map effectively speeds up the algorithm's speed for solving path planning problems.









2023, 42(9): 1527-1532.
doi: 10.13433/j.cnki.1003-8728.20220089
Abstract:
The tire slip characteristics are the basis of a vehicle's dynamics stability control, and the tire slip angle is an important parameter for characterizing the stability of the vehicle's lateral state. The tire slip angle observation method based on the dynamic model is not accurate due to the influence of roll steering and deformation steering under complex working conditions. Therefore, a new cascade observation algorithm based on the adaptive hyperbolic tangent sliding mode observation theory is proposed. Based on the two-degree-of-freedom model of the vehicle, its co-simulation model is established with the CarSim and Simulink software. The sliding mode observation algorithm and the adaptive hyperbolic tangent sliding mode connection are compared and analyzed under two typical working conditions of double shift lines and emergency obstacle avoidance. The results show that the adaptive sliding mode cascade observation algorithm can effectively reduce observation errors by about 61.44% compared with the sliding mode observation algorithm under different working conditions, fully revealing that the algorithm is more accurate and robust.
The tire slip characteristics are the basis of a vehicle's dynamics stability control, and the tire slip angle is an important parameter for characterizing the stability of the vehicle's lateral state. The tire slip angle observation method based on the dynamic model is not accurate due to the influence of roll steering and deformation steering under complex working conditions. Therefore, a new cascade observation algorithm based on the adaptive hyperbolic tangent sliding mode observation theory is proposed. Based on the two-degree-of-freedom model of the vehicle, its co-simulation model is established with the CarSim and Simulink software. The sliding mode observation algorithm and the adaptive hyperbolic tangent sliding mode connection are compared and analyzed under two typical working conditions of double shift lines and emergency obstacle avoidance. The results show that the adaptive sliding mode cascade observation algorithm can effectively reduce observation errors by about 61.44% compared with the sliding mode observation algorithm under different working conditions, fully revealing that the algorithm is more accurate and robust.








2023, 42(9): 1533-1541.
doi: 10.13433/j.cnki.1003-8728.20220088
Abstract:
It is difficult for an unmanned vehicle to use the traditional model predictive control (MPC) algorithm to ensure path tracking accuracy and real-time performance at the same time. To solve this problem, the paper designs a path tracking controller using the state-extension MPC and angle compensation. A 3-degree-of-freedom vehicle dynamic model is established, a dual-feedback MPC controller based on state extension is designed and the controller's parameters are adjusted according to the unmanned vehicle's speed. The vehicle-road tracking model is established, and the fuzzy controller for angle compensation is designed according to the unmanned vehicle's lateral and heading deviation. The MATLAB/Simulink and Carsim software are used to conduct the joint simulation of the designed path tracking controller. The results show that compared with the traditional MPC controller of an unmanned vehicle, at its medium and low speed, the average time for solving the control increment of the state extension MPC controller is reduced by more than 14% and that the maximum lateral and heading deviation of the path tracking controller is reduced by more than 23% and 17% respectively, thus having a better path tracking performance.
It is difficult for an unmanned vehicle to use the traditional model predictive control (MPC) algorithm to ensure path tracking accuracy and real-time performance at the same time. To solve this problem, the paper designs a path tracking controller using the state-extension MPC and angle compensation. A 3-degree-of-freedom vehicle dynamic model is established, a dual-feedback MPC controller based on state extension is designed and the controller's parameters are adjusted according to the unmanned vehicle's speed. The vehicle-road tracking model is established, and the fuzzy controller for angle compensation is designed according to the unmanned vehicle's lateral and heading deviation. The MATLAB/Simulink and Carsim software are used to conduct the joint simulation of the designed path tracking controller. The results show that compared with the traditional MPC controller of an unmanned vehicle, at its medium and low speed, the average time for solving the control increment of the state extension MPC controller is reduced by more than 14% and that the maximum lateral and heading deviation of the path tracking controller is reduced by more than 23% and 17% respectively, thus having a better path tracking performance.









2023, 42(9): 1542-1550.
doi: 10.13433/j.cnki.1003-8728.20220090
Abstract:
High-speed railways have been operating for a long time, and polygonal wear of the wheels often occurs, accompanied by rail corrugation. The comprehensive influence of these two types of damage on the running characteristics of train needs further investigation. The simple harmonic function method was adopted to establish the wheel polygon model, designing the cosine function to describe the rail irregularity wear, establishing the rigid-flexible coupling vehicle dynamics model of the wheelset. The influences of different wheel polygons and rail corrugated wear on train dynamic performance were analyzed and the safety limit of comprehensive wheel-rail wear was obtained. The results show that the influence on the dynamic performance of the train is more intense under the excitation of wheel-rail comprehensive wear. When the train speed is 300 km/h, the maximum increase amplitude of wheel-rail vertical force reaches 30%, and the wheel resonates with the 25th order vibration mode. Wheel polygon has greater influence on vertical force than rail corrugation; under different polygon order and amplitude, wheel-rail comprehensive wear condition has greater influence on vertical vibration acceleration of axle box, wheelset and rail. The wheel polygon safety limit is smaller, the polygon amplitude limit is reduced by 25.9% on average, and it is easier to exceed the limit under the action of wheel-rail comprehensive wear. When the speed is 300 km/h, the safety limits of rail corrugation and wheel polygon order in a certain range are proposed.
High-speed railways have been operating for a long time, and polygonal wear of the wheels often occurs, accompanied by rail corrugation. The comprehensive influence of these two types of damage on the running characteristics of train needs further investigation. The simple harmonic function method was adopted to establish the wheel polygon model, designing the cosine function to describe the rail irregularity wear, establishing the rigid-flexible coupling vehicle dynamics model of the wheelset. The influences of different wheel polygons and rail corrugated wear on train dynamic performance were analyzed and the safety limit of comprehensive wheel-rail wear was obtained. The results show that the influence on the dynamic performance of the train is more intense under the excitation of wheel-rail comprehensive wear. When the train speed is 300 km/h, the maximum increase amplitude of wheel-rail vertical force reaches 30%, and the wheel resonates with the 25th order vibration mode. Wheel polygon has greater influence on vertical force than rail corrugation; under different polygon order and amplitude, wheel-rail comprehensive wear condition has greater influence on vertical vibration acceleration of axle box, wheelset and rail. The wheel polygon safety limit is smaller, the polygon amplitude limit is reduced by 25.9% on average, and it is easier to exceed the limit under the action of wheel-rail comprehensive wear. When the speed is 300 km/h, the safety limits of rail corrugation and wheel polygon order in a certain range are proposed.






















2023, 42(9): 1551-1558.
doi: 10.13433/j.cnki.1003-8728.20220096
Abstract:
In this paper, a morphing trailing edge model with corrugate flexible skin is selected as an object and the multi-motor driving system is adopted to achieve the morphing operation. The model is designed, manufactured and assembled. The corresponding driving, measurement and control system are also built. Subsequently, the improved relative coupling algorithm is selected to achieve angle synchronization control of three motors in the driving system. The design of software and hardware system has been completed. The deflection experiments of trailing edge have been carried out with no-load, ground load and wind tunnel load respectively. The testing results show that the measurement and control system can keep the deflection angle error of trailing edge within an allowable error range. There is no significant difference in the operation of the driving system with or without load. In the wind tunnel test, the deflection speed of the flexible trailing edge can reach 1.7 °/s, the overshoot is below 0.3°, the deflection angle error is below 20° in the startup phase and below 10° in the constant speed stage.
In this paper, a morphing trailing edge model with corrugate flexible skin is selected as an object and the multi-motor driving system is adopted to achieve the morphing operation. The model is designed, manufactured and assembled. The corresponding driving, measurement and control system are also built. Subsequently, the improved relative coupling algorithm is selected to achieve angle synchronization control of three motors in the driving system. The design of software and hardware system has been completed. The deflection experiments of trailing edge have been carried out with no-load, ground load and wind tunnel load respectively. The testing results show that the measurement and control system can keep the deflection angle error of trailing edge within an allowable error range. There is no significant difference in the operation of the driving system with or without load. In the wind tunnel test, the deflection speed of the flexible trailing edge can reach 1.7 °/s, the overshoot is below 0.3°, the deflection angle error is below 20° in the startup phase and below 10° in the constant speed stage.













2023, 42(9): 1559-1566.
doi: 10.13433/j.cnki.1003-8728.20220094
Abstract:
Passive oil-type shimmy dampers cannot respond to the change of shimmy excitation in real time. Traditional magnetorheological (MR) shimmy dampers have shortages such as complicated lead wires, unfavorable heat dissipation and low output damping force. For the above problems, a new differential pressure structure type of double-rod piston MR shimmy damper, applicable to suppress the shimmy of the nose wheel of the aircraft, was presented. It has the fixed double coils, and the two ends of the inner cylinder forming a symmetrical double damping channels with a magnetic core and a magnetic guide ring. According to the requirements of shimmy reduction, the structure design was completed, and the ANSYS/Emag 2020 R1 was used to simulate the magnetic field of the MR damper, which verified the rationality of the theoretical analysis. Finally, the mechanical properties were analyzed. The results show that the output damping force of the designed MR shimmy damper meets the demand of damping, the dynamic adjustable coefficient is large, and the indicator curve is approximate to ellipse. The design idea adopted in this paper has certain guiding significance for the future research of MR shimmy damper of the aircraft landing gear.
Passive oil-type shimmy dampers cannot respond to the change of shimmy excitation in real time. Traditional magnetorheological (MR) shimmy dampers have shortages such as complicated lead wires, unfavorable heat dissipation and low output damping force. For the above problems, a new differential pressure structure type of double-rod piston MR shimmy damper, applicable to suppress the shimmy of the nose wheel of the aircraft, was presented. It has the fixed double coils, and the two ends of the inner cylinder forming a symmetrical double damping channels with a magnetic core and a magnetic guide ring. According to the requirements of shimmy reduction, the structure design was completed, and the ANSYS/Emag 2020 R1 was used to simulate the magnetic field of the MR damper, which verified the rationality of the theoretical analysis. Finally, the mechanical properties were analyzed. The results show that the output damping force of the designed MR shimmy damper meets the demand of damping, the dynamic adjustable coefficient is large, and the indicator curve is approximate to ellipse. The design idea adopted in this paper has certain guiding significance for the future research of MR shimmy damper of the aircraft landing gear.
















2023, 42(9): 1567-1573.
doi: 10.13433/j.cnki.1003-8728.20220116
Abstract:
In order to study the temperature characteristics of the friction pair in the wet clutch friction pair, the transient and steady-state thermal analysis finite element model for a pair of friction pairs is established, in which the oil groove type is transformed into an equivalent cylinder. The convective heat transfer model is established. The convective heat transfer coefficient is calculated. The radial and axial temperature distributions of the friction plate and the steel plate under different times are calculated. At the same time, the influence of the different materials and geometries on the temperature of the friction pair are analyzed, the SAE#2 machine was used to test the temperature of the friction pair of different materials and groove types, and the test results have little error.
In order to study the temperature characteristics of the friction pair in the wet clutch friction pair, the transient and steady-state thermal analysis finite element model for a pair of friction pairs is established, in which the oil groove type is transformed into an equivalent cylinder. The convective heat transfer model is established. The convective heat transfer coefficient is calculated. The radial and axial temperature distributions of the friction plate and the steel plate under different times are calculated. At the same time, the influence of the different materials and geometries on the temperature of the friction pair are analyzed, the SAE#2 machine was used to test the temperature of the friction pair of different materials and groove types, and the test results have little error.














