


 Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2022 Vol. 41, No. 8
Display Method:
2022, 41(8): 1149-1153.
doi: 10.13433/j.cnki.1003-8728.20200446
 PDF 1604KB
PDF 1604KB
Abstract:
In the actual operation of rolling bearing, the load is changeable and the noise interference is large, which often lead to the difficulty of fault feature extraction and fault diagnosis. To solve this problem, this study proposed a deep learning method (MF-CNN) for mechanical equipment fault diagnosis, which combines multi-modal fusion technology (MFT) with convolutional neural network (CNN). The convolutional neural network is used to extract and fuse the time domain and frequency domain modal features from the fault data of rolling bearing under one working condition. The fused features are used as the basis of fault classification to construct the whole network. The data of unknown fault types under other working conditions are tested to realize time domain and frequency domain Dual domain fault diagnosis of the bearing type. A large number of experimental results show that under variable load and noise, the accuracy of MF-CNN model for fault diagnosis is better than that of traditional single-mode CNN in time domain and frequency domain, and the accuracy rate of MF-CNN model is more obvious especially when the load condition changes from heavy load to light load.
In the actual operation of rolling bearing, the load is changeable and the noise interference is large, which often lead to the difficulty of fault feature extraction and fault diagnosis. To solve this problem, this study proposed a deep learning method (MF-CNN) for mechanical equipment fault diagnosis, which combines multi-modal fusion technology (MFT) with convolutional neural network (CNN). The convolutional neural network is used to extract and fuse the time domain and frequency domain modal features from the fault data of rolling bearing under one working condition. The fused features are used as the basis of fault classification to construct the whole network. The data of unknown fault types under other working conditions are tested to realize time domain and frequency domain Dual domain fault diagnosis of the bearing type. A large number of experimental results show that under variable load and noise, the accuracy of MF-CNN model for fault diagnosis is better than that of traditional single-mode CNN in time domain and frequency domain, and the accuracy rate of MF-CNN model is more obvious especially when the load condition changes from heavy load to light load.







2022, 41(8): 1154-1162.
doi: 10.13433/j.cnki.1003-8728.20200441
Abstract:
On-line active balancing of rotor is one of the key technologies in the high-speed, precision and intelligent rotating machine, which can control the unbalance-induced vibration of rotor in real time without stopping machine and human intervention. Based on the polar coordinate principle of counterweight disc, the structure of mechanical balancer is studied. The balancing capacity of counterweight disc is studied, and its design law is obtained. The actuation scheme of balancer is studied, and the single-disk and double-disk rotation-based balancing simulation is carried out, which proves the design rationality of proposed balancer. The principle of rotor balancing method based on on-line influence coefficient is studied, a single-plane active balancing platform of motorized spindle is set up, and the balancing tests and vibration data analysis under different working conditions are completed. The results show that the present on-line active balancing scheme of motorized spindle is effective, and can reduce the vibration displacement to 0.08 μm at 4 500 r/min with a reduction rate of 83.33% and 1 rotational frequency vibration acceleration to 0.7×10-4 g at 3 900 r/min with a reduction rate of 93%.
On-line active balancing of rotor is one of the key technologies in the high-speed, precision and intelligent rotating machine, which can control the unbalance-induced vibration of rotor in real time without stopping machine and human intervention. Based on the polar coordinate principle of counterweight disc, the structure of mechanical balancer is studied. The balancing capacity of counterweight disc is studied, and its design law is obtained. The actuation scheme of balancer is studied, and the single-disk and double-disk rotation-based balancing simulation is carried out, which proves the design rationality of proposed balancer. The principle of rotor balancing method based on on-line influence coefficient is studied, a single-plane active balancing platform of motorized spindle is set up, and the balancing tests and vibration data analysis under different working conditions are completed. The results show that the present on-line active balancing scheme of motorized spindle is effective, and can reduce the vibration displacement to 0.08 μm at 4 500 r/min with a reduction rate of 83.33% and 1 rotational frequency vibration acceleration to 0.7×10-4 g at 3 900 r/min with a reduction rate of 93%.















2022, 41(8): 1163-1168.
doi: 10.13433/j.cnki.1003-8728.20200516
Abstract:
The traditional straight beam flexure hinge often has low rotation accuracy, this paper presents a new type of flexible hinge with variable thickness, the new hinge deformation is mainly concentrated in the center of the hinge, so as to improve the rotational accuracy of the flexure hinge. Firstly, the thickness formula of variable thickness flexure hinge is listed. Then, based on Euler-Bernoulli beam theory, the mechanical model of variable thickness flexure hinge is established, and the numerical solution is carried out with Newton iteration method. In order to verify the correctness of the mechanical model, the hinge model is imported into the finite element simulation software ABAQUS for static simulation, and the correctness of the mechanical model is verified. Based on the mechanical model and finite element simulation, the relationship between the deformation characteristics of variable thickness flexure hinge and the arc radius r is studied. The results show that compared with the traditional straight beam flexure hinge, the variable thickness flexure hinge has larger angle range and smaller center axis drift n. Taking the variable thickness flexure hinge proposed in this paper as the basic unit, a flexible rotating hinge with large turning angle is built, which provides a theoretical reference for the design of bionic joint with large rotation angle and large bearing capacity.
The traditional straight beam flexure hinge often has low rotation accuracy, this paper presents a new type of flexible hinge with variable thickness, the new hinge deformation is mainly concentrated in the center of the hinge, so as to improve the rotational accuracy of the flexure hinge. Firstly, the thickness formula of variable thickness flexure hinge is listed. Then, based on Euler-Bernoulli beam theory, the mechanical model of variable thickness flexure hinge is established, and the numerical solution is carried out with Newton iteration method. In order to verify the correctness of the mechanical model, the hinge model is imported into the finite element simulation software ABAQUS for static simulation, and the correctness of the mechanical model is verified. Based on the mechanical model and finite element simulation, the relationship between the deformation characteristics of variable thickness flexure hinge and the arc radius r is studied. The results show that compared with the traditional straight beam flexure hinge, the variable thickness flexure hinge has larger angle range and smaller center axis drift n. Taking the variable thickness flexure hinge proposed in this paper as the basic unit, a flexible rotating hinge with large turning angle is built, which provides a theoretical reference for the design of bionic joint with large rotation angle and large bearing capacity.














Topological Design of Orthotropic Material Compliant Mechanisms Considering Variation of Fiber Angle
2022, 41(8): 1169-1175.
doi: 10.13433/j.cnki.1003-8728.20200443
Abstract:
To improve the deformation performance of compliant mechanisms with anisotropic material, a method for topology optimization of compliant mechanisms with anisotropic material considering variation of fiber angle is proposed. An improved solid orthotropic material penalization (SOMP) is adopted to introduce variation of fiber angle. The mutual strain energy of the compliant mechanisms is developed as the objective function and the material volume as the constraint. The model for topology optimization of compliant mechanisms with anisotropic material considering variation of fiber angle is established. The method of moving asymptotes is employed to solve the optimization problem. The results of numerical examples show that the present method is effective. Comparing with the results without considering variation of fiber angle, the configurations of compliant mechanisms obtained by topology optimization considering the variation of fiber angle is different, and the mutual strain energy of the mechanisms is larger.
To improve the deformation performance of compliant mechanisms with anisotropic material, a method for topology optimization of compliant mechanisms with anisotropic material considering variation of fiber angle is proposed. An improved solid orthotropic material penalization (SOMP) is adopted to introduce variation of fiber angle. The mutual strain energy of the compliant mechanisms is developed as the objective function and the material volume as the constraint. The model for topology optimization of compliant mechanisms with anisotropic material considering variation of fiber angle is established. The method of moving asymptotes is employed to solve the optimization problem. The results of numerical examples show that the present method is effective. Comparing with the results without considering variation of fiber angle, the configurations of compliant mechanisms obtained by topology optimization considering the variation of fiber angle is different, and the mutual strain energy of the mechanisms is larger.










2022, 41(8): 1176-1182.
doi: 10.13433/j.cnki.1003-8728.20200458
Abstract:
The exploration of the untethered driving method of soft robot is an important research field. However, most of the untethered soft robot driving requires alternate changes in environmental conditions to achieve directional movement. For this reason, an untethered soft wheeled robot driven by humidity in a uniform temperature environment is proposed, and based on the temperature and humidity effect deformation mechanism of sulfuric acid paper and Ecoflex-0030, its directional rolling in a stable environment is realized. The silicone rubber material Ecoflex-0030 is deposited on one side of sulfuric acid paper to make a double layer material. The four soft-driven blades were cut and pasted on the roller. Through the controllable deformation of the four blades in the temperature and humidity environment, realizing the control of active propulsion of the wheel structure. Deformation mechanism of sulfuric acid paper, the design of wheel blade size, driving torque are introduced in detail, and the dynamics of the robot is modeled and analyzed. The prototype of the Self-rolling robot is built and tested. Given the initial state of the drive blades, the wheel moved about 85 mm in 55 s. Furthermore, the two-wheel driving trolley was made by series connecting the two wheels with the driving blades in a staggered phase to verify the feasibility of the design. The results are of great significance for designing the temperature and humidity control untethered soft robot.
The exploration of the untethered driving method of soft robot is an important research field. However, most of the untethered soft robot driving requires alternate changes in environmental conditions to achieve directional movement. For this reason, an untethered soft wheeled robot driven by humidity in a uniform temperature environment is proposed, and based on the temperature and humidity effect deformation mechanism of sulfuric acid paper and Ecoflex-0030, its directional rolling in a stable environment is realized. The silicone rubber material Ecoflex-0030 is deposited on one side of sulfuric acid paper to make a double layer material. The four soft-driven blades were cut and pasted on the roller. Through the controllable deformation of the four blades in the temperature and humidity environment, realizing the control of active propulsion of the wheel structure. Deformation mechanism of sulfuric acid paper, the design of wheel blade size, driving torque are introduced in detail, and the dynamics of the robot is modeled and analyzed. The prototype of the Self-rolling robot is built and tested. Given the initial state of the drive blades, the wheel moved about 85 mm in 55 s. Furthermore, the two-wheel driving trolley was made by series connecting the two wheels with the driving blades in a staggered phase to verify the feasibility of the design. The results are of great significance for designing the temperature and humidity control untethered soft robot.












2022, 41(8): 1183-1190.
doi: 10.13433/j.cnki.1003-8728.20200454
Abstract:
Aiming at the wave behavior of steel cable under high-speed impact, SPH algorithm combining with artificial viscosity and mirror particle method and FEM method are used to simulate the impact process, and the propagation law in stress wave of steel cable under high-speed impact is obtained. The results show that when the deformation occurs at the center of the cable, the particles squeeze each other, and some particles on both sides produce reaction forces. When the fracture occurs in the outside, the particles at the wave crest are tangent to each other and the main stress is larger in the direction of stress transfer, and the particles in the central zone are distributed in an arc shape. When the inner side is not broken, some particles produce larger absolute reaction force. After complete fracture, the main stress direction of the particle at the center points to the impact direction. The impact stress decreases with the increasing of impact angle and increases with the increasing of friction coefficient. The accuracy of the model is verified by theoretical comparison, which has engineering reference. The total energy loss of the two algorithms is similar, but the SPH method is more accurate and efficient, which shows the superiority of SPH method.
Aiming at the wave behavior of steel cable under high-speed impact, SPH algorithm combining with artificial viscosity and mirror particle method and FEM method are used to simulate the impact process, and the propagation law in stress wave of steel cable under high-speed impact is obtained. The results show that when the deformation occurs at the center of the cable, the particles squeeze each other, and some particles on both sides produce reaction forces. When the fracture occurs in the outside, the particles at the wave crest are tangent to each other and the main stress is larger in the direction of stress transfer, and the particles in the central zone are distributed in an arc shape. When the inner side is not broken, some particles produce larger absolute reaction force. After complete fracture, the main stress direction of the particle at the center points to the impact direction. The impact stress decreases with the increasing of impact angle and increases with the increasing of friction coefficient. The accuracy of the model is verified by theoretical comparison, which has engineering reference. The total energy loss of the two algorithms is similar, but the SPH method is more accurate and efficient, which shows the superiority of SPH method.









2022, 41(8): 1191-1196.
doi: 10.13433/j.cnki.1003-8728.20200436
Abstract:
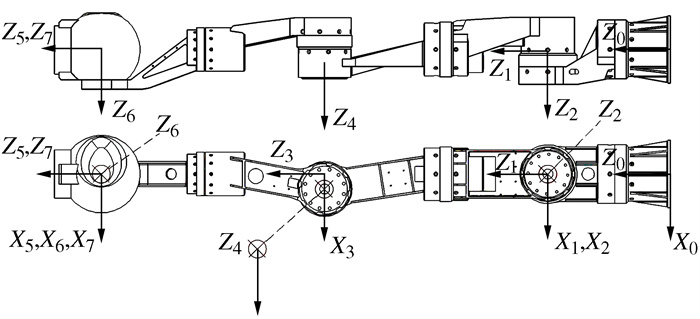
Due to its structural characteristics, the redundant one degree of freedom is often used to avoid obstacles and singular points. However, due to its redundant degrees of freedom, the kinematics solution of the robotic arm of these degrees is more complicated and usually takes more time, directly affecting its follow-up movement and control efficiency. Based on a light-weight human-like seven-degree-of-freedom manipulator, this paper proposes a simplified method to find the inverse solution. Based on the self-motion characteristics of the manipulator, the self-motion geometric method based on the fixed arm angle is combined with the analytical method. This method simplifies the solution of θ1, θ2 and θ3, when the arm angle is zero and is based on the traditional method using the Rodrigues transformation. The method effectively solves the kinematics of this manipulator. The robotics toolbox in MATLAB is used to verify the obtained results, which are correct and fast, thereby laying the foundation for the subsequent motion control of a robotic arm.
Due to its structural characteristics, the redundant one degree of freedom is often used to avoid obstacles and singular points. However, due to its redundant degrees of freedom, the kinematics solution of the robotic arm of these degrees is more complicated and usually takes more time, directly affecting its follow-up movement and control efficiency. Based on a light-weight human-like seven-degree-of-freedom manipulator, this paper proposes a simplified method to find the inverse solution. Based on the self-motion characteristics of the manipulator, the self-motion geometric method based on the fixed arm angle is combined with the analytical method. This method simplifies the solution of θ1, θ2 and θ3, when the arm angle is zero and is based on the traditional method using the Rodrigues transformation. The method effectively solves the kinematics of this manipulator. The robotics toolbox in MATLAB is used to verify the obtained results, which are correct and fast, thereby laying the foundation for the subsequent motion control of a robotic arm.








2022, 41(8): 1197-1204.
doi: 10.13433/j.cnki.1003-8728.20200438
Abstract:
In order to improve the stability and safety of the forging parts clamping of the hub forging robot in the high temperature and vibration environments, an under-rank coupling end picker was designed and optimized. Firstly, the under-rank coupling end picker was designed by coupling the under-rank end picker and the spring rod and its adaptive grasping process was analyzed. Then the contact force model for the end picker actuator was established in terms of the principle of virtual work in the adaptive clamping state. Subsequently, the structural parameter optimization model was established with the requirement of the balance of the contact force, and a new adaptive small world algorithm (ASWA) and its optimization process were proposed. Finally, the end picker was optimized via an adaptive small world optimization algorithm, and the optimization results was compared with the empirical method, Fmincon optimization function, genetic algorithm and basic small world algorithm. Numerical tests show that comparing with the other four algorithms, the end picker optimization target value of the ASWA is the smallest, and reduced by 97.4%, 62.9%, 52.3% and 42.2% respectively, which shows that the small-world algorithm is feasibility and superiority in the optimization of under-rank coupling end pickup; furthermore, substituting the optimized structural parameters into the contact force model of the end picker, it shows that the maximum deviation of the contact force at different contact points is also the smallest, and the maximum deviation is reduced by 87.2%, 82.6%, 69.5% and 42.1% respectively, which meets the requirements for the balance of the contact force in the clamping of picker.
In order to improve the stability and safety of the forging parts clamping of the hub forging robot in the high temperature and vibration environments, an under-rank coupling end picker was designed and optimized. Firstly, the under-rank coupling end picker was designed by coupling the under-rank end picker and the spring rod and its adaptive grasping process was analyzed. Then the contact force model for the end picker actuator was established in terms of the principle of virtual work in the adaptive clamping state. Subsequently, the structural parameter optimization model was established with the requirement of the balance of the contact force, and a new adaptive small world algorithm (ASWA) and its optimization process were proposed. Finally, the end picker was optimized via an adaptive small world optimization algorithm, and the optimization results was compared with the empirical method, Fmincon optimization function, genetic algorithm and basic small world algorithm. Numerical tests show that comparing with the other four algorithms, the end picker optimization target value of the ASWA is the smallest, and reduced by 97.4%, 62.9%, 52.3% and 42.2% respectively, which shows that the small-world algorithm is feasibility and superiority in the optimization of under-rank coupling end pickup; furthermore, substituting the optimized structural parameters into the contact force model of the end picker, it shows that the maximum deviation of the contact force at different contact points is also the smallest, and the maximum deviation is reduced by 87.2%, 82.6%, 69.5% and 42.1% respectively, which meets the requirements for the balance of the contact force in the clamping of picker.






2022, 41(8): 1205-1210.
doi: 10.13433/j.cnki.1003-8728.20200444
Abstract:
In order to reduce the time and energy consumption in spot welding, a planning method based on joint space optimal path is proposed. Firstly, the model for 3-RRR parallel soldering machine is analyzed, and the kinematics model for 3-RRR parallel soldering machine is established via geometric method. Secondly, a model for path planning based on joint space angular weighted sum is established, and an improved ant colony algorithm with elite strategy and information volatile factor adaptive regulation function is used to optimize the model. Finally, the improved ant colony algorithm is used to plan the joint space angle weighting and the optimal path of 3-RRR parallel soldering machine. The simulation data show that, comparing with the optimal path planning under the traditional Cartesian space, the optimal path planning based on the joint space angular weighting and mathematical model can shorten the total joint angle variation, and can realize the soldering robot's fast soldering operation. This path planning method has certain reference for improving the machining efficiency of the traditional welding robot and reducing the energy loss of the robot.
In order to reduce the time and energy consumption in spot welding, a planning method based on joint space optimal path is proposed. Firstly, the model for 3-RRR parallel soldering machine is analyzed, and the kinematics model for 3-RRR parallel soldering machine is established via geometric method. Secondly, a model for path planning based on joint space angular weighted sum is established, and an improved ant colony algorithm with elite strategy and information volatile factor adaptive regulation function is used to optimize the model. Finally, the improved ant colony algorithm is used to plan the joint space angle weighting and the optimal path of 3-RRR parallel soldering machine. The simulation data show that, comparing with the optimal path planning under the traditional Cartesian space, the optimal path planning based on the joint space angular weighting and mathematical model can shorten the total joint angle variation, and can realize the soldering robot's fast soldering operation. This path planning method has certain reference for improving the machining efficiency of the traditional welding robot and reducing the energy loss of the robot.





2022, 41(8): 1211-1215.
doi: 10.13433/j.cnki.1003-8728.20220030
Abstract:
A path arranging with iso-cusp rule tending to deviate from the optimal feed directions has always been a problem in tool path planning. An efficient tool path generation method considering both direction matching and path interval is thus proposed to alleviate this predicament in this paper. Directions at different sampling points can be obtained on basis of the mapping relation between a curved surface and its corresponding parameter domain. Feed direction at any point on the surface can be derived quickly using the bilinear interpolation algorithm. Considering the requirement of optimal-feed-direction matching, the minimum deviation function of actual and desired cutting directions can be established by taking the unit tangents of a path as actual ones and the constraints of path optimization are expressed as two trajectories with different path intervals. The final tool path can be solved from the optimization model using the genetic algorithm. The effectiveness of the proposed method in improving the match of optimal feed directions meanwhile guaranteeing an efficient arrangement has been validated through cutting simulation, which is beneficial to enhance the cutting performance of a machine tool.
A path arranging with iso-cusp rule tending to deviate from the optimal feed directions has always been a problem in tool path planning. An efficient tool path generation method considering both direction matching and path interval is thus proposed to alleviate this predicament in this paper. Directions at different sampling points can be obtained on basis of the mapping relation between a curved surface and its corresponding parameter domain. Feed direction at any point on the surface can be derived quickly using the bilinear interpolation algorithm. Considering the requirement of optimal-feed-direction matching, the minimum deviation function of actual and desired cutting directions can be established by taking the unit tangents of a path as actual ones and the constraints of path optimization are expressed as two trajectories with different path intervals. The final tool path can be solved from the optimization model using the genetic algorithm. The effectiveness of the proposed method in improving the match of optimal feed directions meanwhile guaranteeing an efficient arrangement has been validated through cutting simulation, which is beneficial to enhance the cutting performance of a machine tool.








2022, 41(8): 1216-1223.
doi: 10.13433/j.cnki.1003-8728.20200453
Abstract:
The geometric backlash of RV reducer is the rotation angle hysteresis of output shaft when the input shaft rotation direction changed, which is caused by transmission element geometry accuracy, shape accuracy and position accuracy. The influence of various manufacturing errors and installation errors on geometric backlash has been studied and tested by many researchers. However, the current research on the geometric backlash does not consider the effect of the modification method of the cycloidal gear tooth profile and the direction of the manufacturing errors and installation errors. In fact, the manufacturing errors and installation errors have directions, and the modification methods are different, the geometrical backlash of the RV reducer is different when the output shaft is in different positions. In this paper, the size and direction of manufacturing errors and installation errors of RV reducer's parts are considered comprehensively, and the accurate geometric backlash model and mathematical model of RV reducer are established, and the geometric hysteresis was simulated and tested. The results can be used to improve the transmission precision of the reducer and provide the basis for the tolerance design of each part of the transmission system.
The geometric backlash of RV reducer is the rotation angle hysteresis of output shaft when the input shaft rotation direction changed, which is caused by transmission element geometry accuracy, shape accuracy and position accuracy. The influence of various manufacturing errors and installation errors on geometric backlash has been studied and tested by many researchers. However, the current research on the geometric backlash does not consider the effect of the modification method of the cycloidal gear tooth profile and the direction of the manufacturing errors and installation errors. In fact, the manufacturing errors and installation errors have directions, and the modification methods are different, the geometrical backlash of the RV reducer is different when the output shaft is in different positions. In this paper, the size and direction of manufacturing errors and installation errors of RV reducer's parts are considered comprehensively, and the accurate geometric backlash model and mathematical model of RV reducer are established, and the geometric hysteresis was simulated and tested. The results can be used to improve the transmission precision of the reducer and provide the basis for the tolerance design of each part of the transmission system.













2022, 41(8): 1224-1230.
doi: 10.13433/j.cnki.1003-8728.20220151
Abstract:
In order to solve the poor processing accuracy, poor hole shape and large thermal damage in laser processing of micro-holes of flexible copper clad laminate (FCCL), the material removal process and processing quality of micro-holes in high frequency flexible copper clad laminate substrate modified polyimide (MPI) via femtosecond laser were explored. The experiment of MPI micro-holes processing via femtosecond laser was carried out. And the pyrolysis mechanism of MPI was analyzed by thermogravimetry infrared combined system. Then, laser confocal microscope and field emission scanning electron microscope are used to measure the micro-hole morphology. The results show that photochemical and photothermal reactions occur when the femtosecond laser act on the MPI substrate. And the MPI substrate was removed layer by layer in the form of wide and smooth arc gullies. Corrugated steps, particle accumulation, and other ablation microstructures were found in the material removal process. In the processing, the material ablation reaction decreased with the increasing of number of machining cycles. The change rate of micro-hole depth was basically unchanged. And the amount of material removal decreased with the increasing of processing turns but increased sharply in the end of processing. Femtosecond laser can realize high-quality micro-hole processing on the surface of modified polyimide substrate.
In order to solve the poor processing accuracy, poor hole shape and large thermal damage in laser processing of micro-holes of flexible copper clad laminate (FCCL), the material removal process and processing quality of micro-holes in high frequency flexible copper clad laminate substrate modified polyimide (MPI) via femtosecond laser were explored. The experiment of MPI micro-holes processing via femtosecond laser was carried out. And the pyrolysis mechanism of MPI was analyzed by thermogravimetry infrared combined system. Then, laser confocal microscope and field emission scanning electron microscope are used to measure the micro-hole morphology. The results show that photochemical and photothermal reactions occur when the femtosecond laser act on the MPI substrate. And the MPI substrate was removed layer by layer in the form of wide and smooth arc gullies. Corrugated steps, particle accumulation, and other ablation microstructures were found in the material removal process. In the processing, the material ablation reaction decreased with the increasing of number of machining cycles. The change rate of micro-hole depth was basically unchanged. And the amount of material removal decreased with the increasing of processing turns but increased sharply in the end of processing. Femtosecond laser can realize high-quality micro-hole processing on the surface of modified polyimide substrate.












2022, 41(8): 1231-1239.
doi: 10.13433/j.cnki.1003-8728.20200455
Abstract:
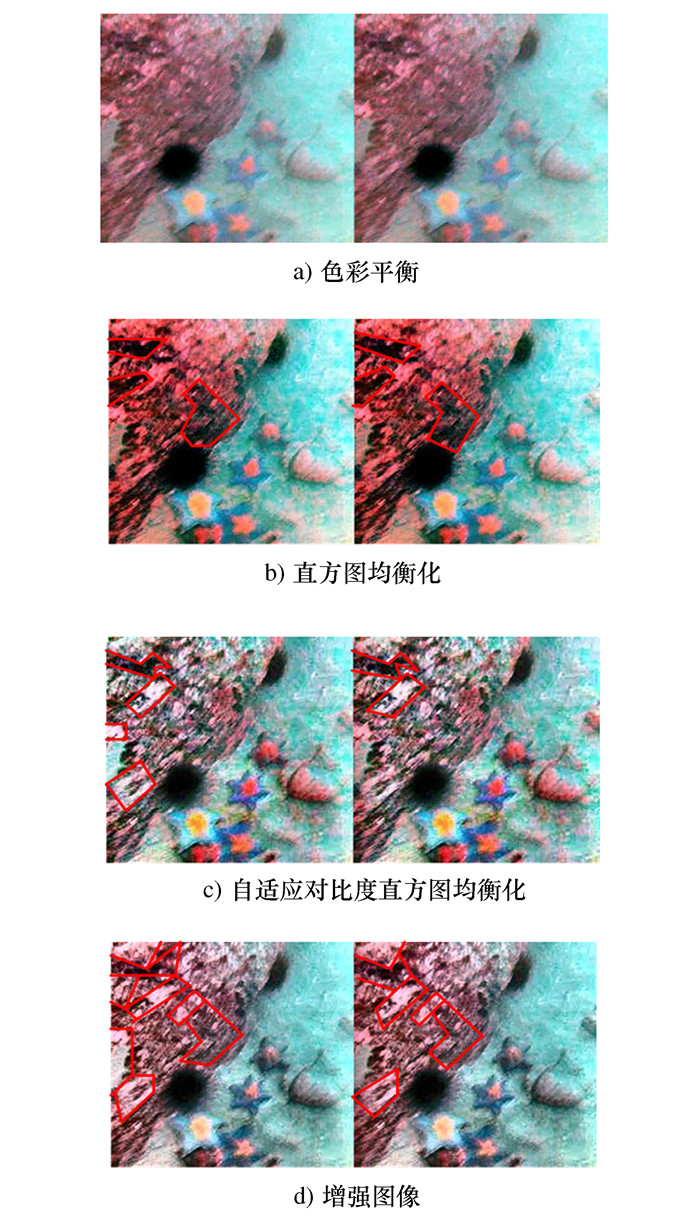
Due to the absorption and scattering of light in the water environment, the collected underwater image has many defects of color deviation, poor contrast, blurred details and uneven illumination. Therefore, an improved homomorphic filtering and multi-scale fusion method for underwater image enhancement is proposed to resolve this problem. Firstly, the color correction image is obtained by using color balance algorithm. Secondly, the contrast-limited adaptive histogram equalization(CLAHE) algorithm and the improved homomorphic filtering algorithm are respectively used for the color-corrected image to obtain a contrast-enhanced image with uniform brightness. Finally, the four weights of Laplacian contrast, local contrast, saliency and saturation were used for multi-scale fusion of the three images with dominant features after the above processing. In order to verify the effectiveness of the improved algorithm in this paper, subjective visual effects and three objective indicators are used for verification. The results show that this improved algorithm can not only solve the problem of color distortion, but also effectively improve the contrast, clarity and brightness of the image.
Due to the absorption and scattering of light in the water environment, the collected underwater image has many defects of color deviation, poor contrast, blurred details and uneven illumination. Therefore, an improved homomorphic filtering and multi-scale fusion method for underwater image enhancement is proposed to resolve this problem. Firstly, the color correction image is obtained by using color balance algorithm. Secondly, the contrast-limited adaptive histogram equalization(CLAHE) algorithm and the improved homomorphic filtering algorithm are respectively used for the color-corrected image to obtain a contrast-enhanced image with uniform brightness. Finally, the four weights of Laplacian contrast, local contrast, saliency and saturation were used for multi-scale fusion of the three images with dominant features after the above processing. In order to verify the effectiveness of the improved algorithm in this paper, subjective visual effects and three objective indicators are used for verification. The results show that this improved algorithm can not only solve the problem of color distortion, but also effectively improve the contrast, clarity and brightness of the image.












Electromagnetic Characteristics of a Segmented Rotor Flux-switching Generator with Magnetic Barriers
2022, 41(8): 1240-1246.
doi: 10.13433/j.cnki.1003-8728.20200451
Abstract:
To solve the problem that the no-load electromotive force is symmetrical across the axis of the positive and negative half-cycles and that their amplitudes are not equal when the traditional segmented rotor flux-switching generator has a low excitation current, a method of increasing the air gap magnetic barrier on the stator and rotor is proposed to weaken the harmonics in the no-load electromotive force and improve its waveform. The harmonic weakening principles is analyzed theoretically with the motor formula. The static characteristics of the new segmented rotor flux-switching generator, including magnetic field distribution, no-load electromotive force, flux linkage, etc. are analyzed with the finite element simulation software. The simulation results show that the sinusoidal distortion rate of the voltage waveform of the motor no-load electromotive force after optimization is reduced by 83.1%.
To solve the problem that the no-load electromotive force is symmetrical across the axis of the positive and negative half-cycles and that their amplitudes are not equal when the traditional segmented rotor flux-switching generator has a low excitation current, a method of increasing the air gap magnetic barrier on the stator and rotor is proposed to weaken the harmonics in the no-load electromotive force and improve its waveform. The harmonic weakening principles is analyzed theoretically with the motor formula. The static characteristics of the new segmented rotor flux-switching generator, including magnetic field distribution, no-load electromotive force, flux linkage, etc. are analyzed with the finite element simulation software. The simulation results show that the sinusoidal distortion rate of the voltage waveform of the motor no-load electromotive force after optimization is reduced by 83.1%.











2022, 41(8): 1247-1253.
doi: 10.13433/j.cnki.1003-8728.20200449
Abstract:
In order to realize the intellectualization and multi-functionalization of robot control human-computer interaction, a mobile robot gesture control system based on visual gesture recognition is proposed in this paper. An omnidirectional four-wheel mobile robot was put up with Mecanum wheels. The master-slave control was used as the robot control architecture. The visual gesture recognition system as host computer was built with PC. The robot motion control system of the lower computer was designed with Raspberry Pi. And using higher reliability TCP protocol achieves WIFI wireless communication between the host and lower computer. Using the improved VGG16 network model, a gesture recognition algorithm was designed, and we used the established gesture image database to train and test the network model. Through the application of the improved VGG16 network, high-precision gesture image recognition was realized. The feasibility of this scheme that uses the visual recognition gesture to control mobile robot was verified through experiments, which provides a theoretical reference for the application of gesture control.
In order to realize the intellectualization and multi-functionalization of robot control human-computer interaction, a mobile robot gesture control system based on visual gesture recognition is proposed in this paper. An omnidirectional four-wheel mobile robot was put up with Mecanum wheels. The master-slave control was used as the robot control architecture. The visual gesture recognition system as host computer was built with PC. The robot motion control system of the lower computer was designed with Raspberry Pi. And using higher reliability TCP protocol achieves WIFI wireless communication between the host and lower computer. Using the improved VGG16 network model, a gesture recognition algorithm was designed, and we used the established gesture image database to train and test the network model. Through the application of the improved VGG16 network, high-precision gesture image recognition was realized. The feasibility of this scheme that uses the visual recognition gesture to control mobile robot was verified through experiments, which provides a theoretical reference for the application of gesture control.










2022, 41(8): 1254-1260.
doi: 10.13433/j.cnki.1003-8728.20220147
Abstract:
In order to improve the accuracy of the fatigue life prediction of 16Mn steel welded joints, this article first uses three different methods to predict the fatigue life of cross welded joints respectively, and verifies that the notch stress equivalent value method considers the effect of stress concentration on the fatigue life of 16Mn steel. Secondly, the notch stress equivalent value method based on notch stress intensity factor theory is used to predict the fatigue life of welded joints again. The comparison with the test results shows that there is larger error in the evaluation results of the 16Mn steel welded joint life using the notch stress equivalent value method. Combined with the test results of 16Mn steel cross welded joints, the notch equivalent stress correction coefficient is introduced, and a modified notch equivalent stress formula suitable for commonly used 16Mn steel welded joints is obtained.
In order to improve the accuracy of the fatigue life prediction of 16Mn steel welded joints, this article first uses three different methods to predict the fatigue life of cross welded joints respectively, and verifies that the notch stress equivalent value method considers the effect of stress concentration on the fatigue life of 16Mn steel. Secondly, the notch stress equivalent value method based on notch stress intensity factor theory is used to predict the fatigue life of welded joints again. The comparison with the test results shows that there is larger error in the evaluation results of the 16Mn steel welded joint life using the notch stress equivalent value method. Combined with the test results of 16Mn steel cross welded joints, the notch equivalent stress correction coefficient is introduced, and a modified notch equivalent stress formula suitable for commonly used 16Mn steel welded joints is obtained.









2022, 41(8): 1261-1269.
doi: 10.13433/j.cnki.1003-8728.20200452
Abstract:
Taking the three-axle pure-electric articulated bus as the research object, aiming at the problems of single motor centralized drive configuration, such as the difficulty of power system layout and long transmission chain, the configuration of three-axle pure-electric articulated bus based on in-wheel motor distributed drive was constructed, and the key assembly parameters were matched. Aiming at the torque distribution problem of front, middle and rear axle motors, the optimal torque distribution strategy was proposed for the target of the best system efficiency and torque optimization distribution model are built based on MATLAB/Simulink. The vehicle joint simulation model is built based on AVL Cruise and MATLAB/Simulink. On the premise of meeting the vehicle power and economic indicators, through the comparison with the single motor centralized drive configuration, it can be seen that: 1) the acceleration time of the whole vehicle from 0 to 50 km/h is reduced by 3.1 s, the maximum speed is increased by 5 km/h, and the maximum climbing gradient is increased by 1.3%. 2) under the full load CCBC condition, the energy consumption per 100 km is reduced by 11.51%, and the driving range is increased by 27 km. 3) the optimal torque distribution strategy can reasonably distribute the required torque to each motor, optimize the motor working range and effectively reduce vehicle energy consumption.
Taking the three-axle pure-electric articulated bus as the research object, aiming at the problems of single motor centralized drive configuration, such as the difficulty of power system layout and long transmission chain, the configuration of three-axle pure-electric articulated bus based on in-wheel motor distributed drive was constructed, and the key assembly parameters were matched. Aiming at the torque distribution problem of front, middle and rear axle motors, the optimal torque distribution strategy was proposed for the target of the best system efficiency and torque optimization distribution model are built based on MATLAB/Simulink. The vehicle joint simulation model is built based on AVL Cruise and MATLAB/Simulink. On the premise of meeting the vehicle power and economic indicators, through the comparison with the single motor centralized drive configuration, it can be seen that: 1) the acceleration time of the whole vehicle from 0 to 50 km/h is reduced by 3.1 s, the maximum speed is increased by 5 km/h, and the maximum climbing gradient is increased by 1.3%. 2) under the full load CCBC condition, the energy consumption per 100 km is reduced by 11.51%, and the driving range is increased by 27 km. 3) the optimal torque distribution strategy can reasonably distribute the required torque to each motor, optimize the motor working range and effectively reduce vehicle energy consumption.

















2022, 41(8): 1270-1277.
doi: 10.13433/j.cnki.1003-8728.20200491
Abstract:
In order to investigate the effect of high temperature and high strain rate on the dynamic mechanical properties of 7150-T6 aluminum alloy, the dynamic impact experiments are carried out by split Hopkinson pressure bar (SHPB), and the microstructure of samples are observed by scanning electron microscopy (SEM). The results show that 7150-T6 aluminum alloy has local thermal softening and weak strain rate sensitivity under high strain rate at room temperature. The flow stress of the material decreases with the increasing of temperature. Especially as the temperature above 200 ℃, the flow stress decreases significantly. Under high strain rate, the higher strain rate causes more obvious adiabatic shear band, while the phenomenon does not occur at high temperature. The Johnson-Cook constitutive equation fitted by the least square method can effectively predict the flow stress under different loading conditions, and the results are well consistent with the experiment data. The research can provide guidance for the lightweight and safety design of 7150-T6 aluminum alloy in vehicles.
In order to investigate the effect of high temperature and high strain rate on the dynamic mechanical properties of 7150-T6 aluminum alloy, the dynamic impact experiments are carried out by split Hopkinson pressure bar (SHPB), and the microstructure of samples are observed by scanning electron microscopy (SEM). The results show that 7150-T6 aluminum alloy has local thermal softening and weak strain rate sensitivity under high strain rate at room temperature. The flow stress of the material decreases with the increasing of temperature. Especially as the temperature above 200 ℃, the flow stress decreases significantly. Under high strain rate, the higher strain rate causes more obvious adiabatic shear band, while the phenomenon does not occur at high temperature. The Johnson-Cook constitutive equation fitted by the least square method can effectively predict the flow stress under different loading conditions, and the results are well consistent with the experiment data. The research can provide guidance for the lightweight and safety design of 7150-T6 aluminum alloy in vehicles.














2022, 41(8): 1278-1288.
doi: 10.13433/j.cnki.1003-8728.20220153
Abstract:
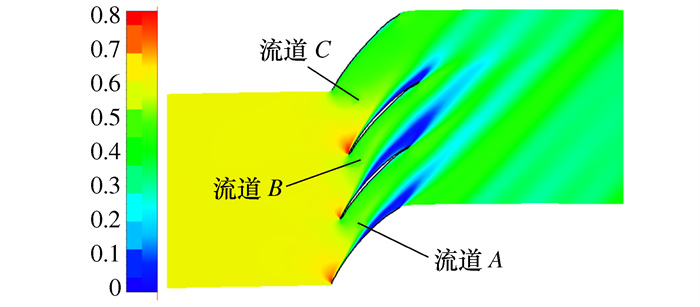
In order to improve the aerodynamic load and stability of the axial compressor, the leading and trailing edges of several blades are arranged staggered with each other in the circumferential direction at different axial positions to form a non-uniform blade row of the compressor. This paper proposes four new configurations of compressor blades, which is uniformly defined as the NPU-Liu-Liao blade series configuration(Abbreviation: LL Blade). This paper introduces the structural characteristics and parameters of NPU-LL blade series configuration, explores its flow characteristics, and preliminarily reveals the prominent advantages of NPU-LL blade series configuration in flow control. The aerodynamic characteristics of four NPU-LL blade cascade layouts are calculated and compared with the conventional cascade. The results show that the configuration of NPU-LL blade series breaks the limitation of traditional blade uniform layout, which can effectively improve the aerodynamic performance of compressor and provide a new idea for the optimization design of compressor performance.
In order to improve the aerodynamic load and stability of the axial compressor, the leading and trailing edges of several blades are arranged staggered with each other in the circumferential direction at different axial positions to form a non-uniform blade row of the compressor. This paper proposes four new configurations of compressor blades, which is uniformly defined as the NPU-Liu-Liao blade series configuration(Abbreviation: LL Blade). This paper introduces the structural characteristics and parameters of NPU-LL blade series configuration, explores its flow characteristics, and preliminarily reveals the prominent advantages of NPU-LL blade series configuration in flow control. The aerodynamic characteristics of four NPU-LL blade cascade layouts are calculated and compared with the conventional cascade. The results show that the configuration of NPU-LL blade series breaks the limitation of traditional blade uniform layout, which can effectively improve the aerodynamic performance of compressor and provide a new idea for the optimization design of compressor performance.

















2022, 41(8): 1289-1297.
doi: 10.13433/j.cnki.1003-8728.20200459
Abstract:
In order to improve the comfort of aircraft economy class, the personal space theory of environmental psychology is introduced to study the effect of the passengers′ personal space intrusion on the comfort design. Through the survey, the specific form, feeling and influence degree of the passengers′ personal space invasion on the comfort were obtained. The mixed variance analysis showed that the influence degree had significantly difference with the passengers′ gender, age and education level. Using DEMATEL method, it is found that tactile sensation and other senses are the largest result and cause dimension respectively, and the centrality of physical space and tactile feeling is far greater than the other two dimensions. Optimizing the corresponding cabin design indicators can improve the comfort of aircraft economy class.
In order to improve the comfort of aircraft economy class, the personal space theory of environmental psychology is introduced to study the effect of the passengers′ personal space intrusion on the comfort design. Through the survey, the specific form, feeling and influence degree of the passengers′ personal space invasion on the comfort were obtained. The mixed variance analysis showed that the influence degree had significantly difference with the passengers′ gender, age and education level. Using DEMATEL method, it is found that tactile sensation and other senses are the largest result and cause dimension respectively, and the centrality of physical space and tactile feeling is far greater than the other two dimensions. Optimizing the corresponding cabin design indicators can improve the comfort of aircraft economy class.









2022, 41(8): 1298-1305.
doi: 10.13433/j.cnki.1003-8728.20200447
Abstract:
The assembly of multi-stage disc rotors is a very important part of the manufacturing process of aero-engine rotors, and the size of the assembly unbalance directly affects the vibration level of the whole aero-engine. In order to predict and optimize the initial unbalance of the multi-stage disc rotor, firstly obtain the representation matrix of each single piece by calculating the parameters such as end runout and radial runout. After stacking calculation, the spatial position and posture of the assembly in the coordinate system with the axis of rotation as the axis are obtained. Then calculate the static unbalance and even unbalance of each single piece and the whole. At the same time, obtain the gravity center distribution of each single piece relative to the position of the axis of rotation, and establish an assembly unbalance prediction model. Based on the predictive model, the genetic algorithm is used for multi-objective optimization. Among them, the static unbalance, the even unbalance and the gravity center distribution are taken as the target, and the assembly phase is taken as the design variable. The results show that compared with the original assembly scheme, the initial static unbalance after genetic algorithm optimization based on the prediction model is reduced to 5.11%, the even unbalance is reduced to 7.09%, and the gravity center distribution range is reduced to 14.29%. The optimization effect is significant, and the assembly quality is improved significantly. Moreover, compared with the other optimization that does not consider the gravity center distribution, it proves that the range of gravity center can be effectively controlled; and compared with the exhaustive method optimization, it proves that it can effectively save time. This study has certain engineering guiding significance for the advancement of aero-engine assembly technology.
The assembly of multi-stage disc rotors is a very important part of the manufacturing process of aero-engine rotors, and the size of the assembly unbalance directly affects the vibration level of the whole aero-engine. In order to predict and optimize the initial unbalance of the multi-stage disc rotor, firstly obtain the representation matrix of each single piece by calculating the parameters such as end runout and radial runout. After stacking calculation, the spatial position and posture of the assembly in the coordinate system with the axis of rotation as the axis are obtained. Then calculate the static unbalance and even unbalance of each single piece and the whole. At the same time, obtain the gravity center distribution of each single piece relative to the position of the axis of rotation, and establish an assembly unbalance prediction model. Based on the predictive model, the genetic algorithm is used for multi-objective optimization. Among them, the static unbalance, the even unbalance and the gravity center distribution are taken as the target, and the assembly phase is taken as the design variable. The results show that compared with the original assembly scheme, the initial static unbalance after genetic algorithm optimization based on the prediction model is reduced to 5.11%, the even unbalance is reduced to 7.09%, and the gravity center distribution range is reduced to 14.29%. The optimization effect is significant, and the assembly quality is improved significantly. Moreover, compared with the other optimization that does not consider the gravity center distribution, it proves that the range of gravity center can be effectively controlled; and compared with the exhaustive method optimization, it proves that it can effectively save time. This study has certain engineering guiding significance for the advancement of aero-engine assembly technology.









2022, 41(8): 1306-1312.
doi: 10.13433/j.cnki.1003-8728.20200450
Abstract:
Large eddy simulation and acoustic analogy are used to study the effect of the periodic convex structure on the flow and sound fields of a circular cylinder. Taking a cylinder with a diameter of 30 mm as the research object, the period of the convex structure is a diameter of 1/3, and the spanwise thickness of the convex structure is a diameter of 1/10. Two kinds of convex structures with the diameters of 42 mm and 48 mm are designed. The flow and sound fields of the reference cylinder and two kinds of cylinders with periodic convex structures at a Reynolds number of 123 100 are simulated. The influence of the convex structure on the aerodynamic coefficient and the vortex shedding noise of the cylinder are analyzed in detail. It is found that the larger diameter of the convex structure can reduce noise around the cylinder more significantly, the total sound pressure level at below 25 000 Hz can be reduced by up to 19 dB; at the same time, the convex structure can also reduce the fluctuation of the lift coefficient and the mean value of drag coefficient. Further research shows that the noise reduction mechanism of periodic convex structure lies in that the periodic convex structure destroys the continuity of shedding vortex in spanwise direction.
Large eddy simulation and acoustic analogy are used to study the effect of the periodic convex structure on the flow and sound fields of a circular cylinder. Taking a cylinder with a diameter of 30 mm as the research object, the period of the convex structure is a diameter of 1/3, and the spanwise thickness of the convex structure is a diameter of 1/10. Two kinds of convex structures with the diameters of 42 mm and 48 mm are designed. The flow and sound fields of the reference cylinder and two kinds of cylinders with periodic convex structures at a Reynolds number of 123 100 are simulated. The influence of the convex structure on the aerodynamic coefficient and the vortex shedding noise of the cylinder are analyzed in detail. It is found that the larger diameter of the convex structure can reduce noise around the cylinder more significantly, the total sound pressure level at below 25 000 Hz can be reduced by up to 19 dB; at the same time, the convex structure can also reduce the fluctuation of the lift coefficient and the mean value of drag coefficient. Further research shows that the noise reduction mechanism of periodic convex structure lies in that the periodic convex structure destroys the continuity of shedding vortex in spanwise direction.











