


 Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2022 Vol. 41, No. 10
 PDF 3085KB
PDF 3085KBAiming at the shortcomings of traditional behavior-based control architecture in solving the problem of local path repair of autonomous underwater vehicle (AUV), such as unacceptable defects of AUV′s overall behavior, a new behavior fusion -Interval Programming (IVP) method was designed in this paper. Firstly, the path planning task is divided into multiple specific behaviors such as path point tracking behavior, real-time obstacle avoidance behavior; and combined with environmental constraints, the AUV control decision selection is considered as a multi-objective optimization problem. Then the IVP model is used to coordinate these behaviors above. Finally, the simulation analysis is carried out based on MOOS(Mission oriented operating suite)-IVP system with the surrounding path point tracking around the static target. The results show that the IVP model in proposed method can avoid obstacles in real time and ensure the optimization of results while solving the decision space grows exponentially with the increase of decision variables.












Due to the shortcomings of the clamping mechanism of a current pipe climbing robot, a four-bar linkage clamping mechanism is designed based on the three-point centering method. The clamping mechanism is composed of a four-link clamping part and a screw transmission part. The four-link movement is driven by the screw transmission to realize the clamping and opening of the clamping mechanism. Firstly, the clamping mechanism was designed and analyzed with force closure. Secondly, the connecting rods of the clamping mechanism were optimized, thus reducing the weight by 11.7%. Finally, the theoretical maximum load capacity of the clamping mechanism was analyzed with the ANSYS transient simulation. The pipe climbing robot's load simulation verifies the reliability of the clamping mechanism.















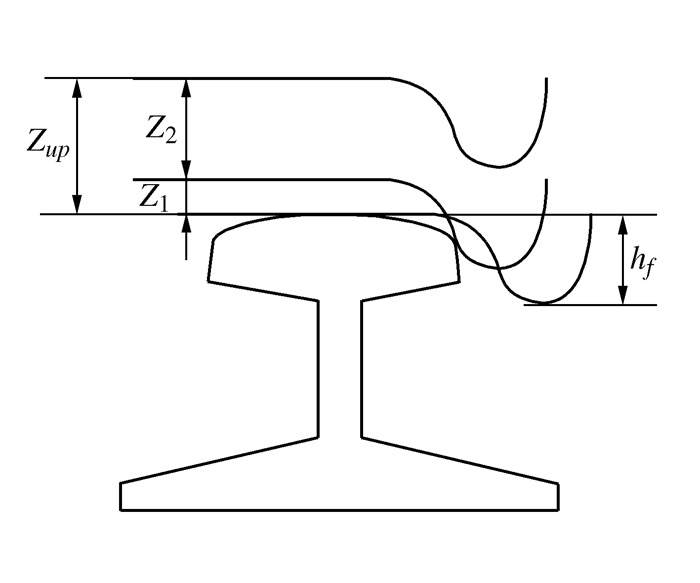
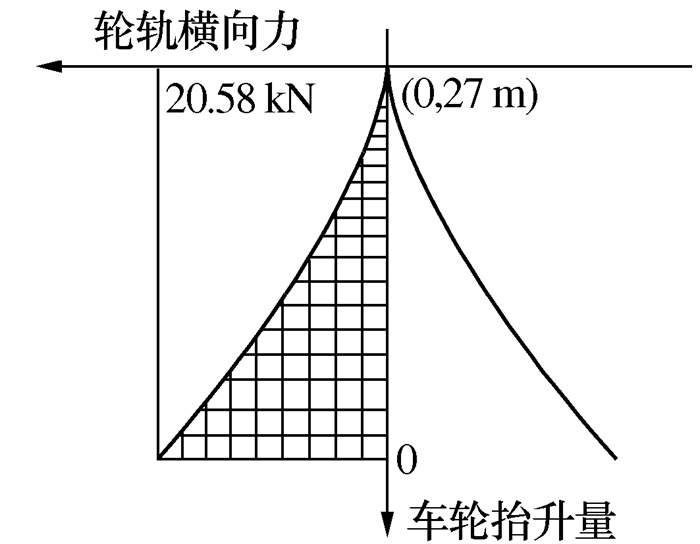
In order to better predict the train operation safety, the sudden transition process of the train from stable operation to complete derailment at the curve is discussed based on the catastrophe theory. Considering the influence of wheel raise and wheel-rail lateral force on the train operation, a cusp catastrophe model is established, and the dangerous area of train derailment at the curve are given by the bifurcation set of the cusp catastrophe theory. By applying the SIMPACK software to establish a train system simulation model and by transforming the radius of the curve, the changes of wheel raise and wheel-rail lateral force with time are analyzed. The values of control variables obtained under different working conditions are compared with the bifurcation set. The results show that when the curve radius is too small, the wheel raise and wheel-rail lateral force may exceed the limit value, and then the train will be off track, thus verifying that the catastrophe theory is effective for train derailment early warning.



Due to the inevitable DC component in the signal and the trend term and error behavior generated during the integration process, the accuracy of the integration result is greatly reduced when integrating the signal of vibration acceleration. Especially after the secondary integration, the frequency domain characteristics of the displacement signal are lost seriously. In order to solve this problem, a fault feature extraction method combining variational mode decomposition (VMD) and frequency domain integration is proposed in this paper. Firstly, the acceleration signal is decomposed by VMD, and then the component with the largest correlation coefficient is selected as the optimal component from several components according to the pearson correlation coefficient method. Finally, the optimal component is subjected to frequency domain quadratic integration to obtain the vibration displacement signal. Simulation and experimental results show that the method can effectively reduce the interference caused by trend items and noise, and improve the accuracy of fault information, which has better superiority.










In order to reduce the influence of the thermal deformation on the machining accuracy of the cutter, taking the carbide end milling cutter as the research object, a method based on BP neural network to identify the real-time thermal error state of the end milling cutter in the milling is proposed. A test platform was built to carry out the thermal error experiment of end milling cutter, and a direct measurement method of thermal error deformation of end milling cutter was designed to collect the temperature signal of spindle during continuous addition of machine tool and thermal error deformation of end milling cutter. The different thermal deformation states of the cutter and their associated eigenvalues were input into the 8-4-2 three-layer BP neural network model. The experimental results show that the recognition rate of the tool thermal deformation recognition system is about 87.2%.








In order to properly select the parameters of variational mode decomposition (VMD), and to overall consider the periodic impulsiveness and cyclostationary of bearing fault signal, the correlation between each component and the original signal, and the diagnosis problem of different faults, a new bearing fault diagnosis method using beetle antennae search (BAS) optimized VMD and weighted ensemble kurtosis for extracting the optimal intrinsic mode function (IMF) combining with the cuckoo search algorithm optimized support vector machine (CS-SVM) is constructed in this study. Firstly, BAS is used to optimize VMD parameters with the mean envelope entropy as the fitness function, and optimized VMD is used to decompose signal. Then, IMF is optimized by the maximum value of weighted ensemble kurtosis, and extract its fault features to form feature vectors. Finally, they are imported into the CS-SVM for fault classification. Simulation signal and actual bearing data are used to verify the proposed method.








In order to solve the problem of unreasonable wall thickness design of a gearbox shell for a fractured pump, an optimization method integrating sparse grid approximate model and MOGA genetic algorithm was proposed. The comparison and analysis between the prediction accuracy of the traditional approximate model and the sparse grid model show that the prediction accuracy of the sparse grid model is higher. The sample data is constructed by using the sparse grid initialization method, the response surface model is built, and the MOGA genetic algorithm is used to search for the optimal design scheme. The results show that the weight of the gearbox shell is reduced by 18.1% under the structural performance meeting the requirements of use, which provides a new way for the lightweight design of the gearbox shell.















Aiming at the complex problem of the unbalance combined vibration response characteristics of the combustor rotor of a turboshaft engine with the flexible supports, based on the character of flexible support, the vibration response law of the rotor is studied from the perspective of the combination of unbalance phase difference of the rotor. After the models of squirrel cage and squeeze film damper are established, the rotor system with flexible supports is modelling for studying the relationship between the dynamic characteristic of flexible support and the inherent characteristic of rotor system. After this, the law of rotor vibration response affected by the combination of unbalanced phase difference is exposed. The vortex axis engine rotor dynamics simulation test bench is designed and established for verification experiment of the unbalance vibration response laws. The results show that: when the flexible support stiffness is less than 3×104 N/mm, the rigid body mode will appear in the rotor system as soon as possible, meaning that it can avoid the phenomenon of crossing the critical speed point in the wide working speed range of the engine. In the first order critical speed, the vibration response caused by the unbalance of the in-phase combination is greater than that of the anti-phase combination, and the unbalance of the anti-phase combination weakens the critical vibration peak of the first order to 50% of the in-phase combination. After the first critical speed, the vibration amplitude caused by the unbalance of the inverse phase combination is much bigger than that of the in-phase combination.









A time optimal trajectory planning method for industrial robots is proposed to solve time optimal trajectory planning problem. Key nodes generated by path planning are connected in pairs by cubic polynomial. The fitness function is constructed by penalty function method with time optimality as optimization objective and kinematic characteristics as constraints. A double-population particle swarm optimization algorithm is proposed to optimize the defined fitness function. Taking a 6-DOF manipulator as an example, simulation results show that quality of the proposed algorithm is better than that of PSO (particle swarm optimization) and QPSO (quantum particle swarm optimization). Compared with PSO and QPSO, time optimal value decreases by 43.83% and 1.75%, mean value decreases by 54.62% and 17.05%, and standard deviation decreases by 91.38% and 83.80%, respectively. The results show that the proposed method can smooth the trajectory of each joint of the manipulator, and the maximum velocity, acceleration and additional acceleration of 77.78% are within the 50% maximum constraint. The proposed method has strong practicability in the time optimal trajectory planning of robots and can prolong service life of robots.



Double-blade half-rotating impeller tidal turbine (DHITT) is a new kind of lift-drag composite vertical tidal turbine. Hydrodynamic performance had a direct impact on its engineering application for DHITT. The working principle of DHITT was firstly introduced, and the relationship between the main performance parameters and the experimental parameters of DHITT was analyzed. Based on DHITT prototype and experiment platform, the underwater experiment schemes, including low income flow velocity start-up performance test, coefficient of energy extraction test and coefficient of energy extraction stability test at different income flow velocity had been carried out, and the relationship between the simulation results and the experimental was contrastively analyzed. The experimental results showed that DHITT maintained a good start-up characteristic at low income flow velocity (0.5 m/s), and the income flow velocity had slight influence on the coefficient of energy extraction of DHITT. The average coefficient of energy extraction of DHITT under optimal load can be nearly 46%, which was significantly higher than that of those traditional vertical turbines. The next research direction of DHITT is to improve the stability of the energy output.










The integrated control method for a hub motor-driven EV drive suspension system is studied in this paper. The coupling-dynamic model of a hub motor-driven EV and road excitation model are constructed, including the torsional, longitudinal and vertical vibration models. Then, the fuzzy, sliding mode and proportional-integral-derivative controllers are designed on this basis, and each controller is integrated to coordinate and complementarily control the active front-wheel steering, target yaw moment and active suspension of an EV. The integrated control of the drive suspension system of an EV is realized. The results reveal that the lateral acceleration and yaw rate of the vehicle body at the peak can be significantly reduced under the integrated and coordinated control using this method. Moreover, the vertical acceleration and yaw angle of the mass centre can be effectively suppressed, and the comprehensive performance of the EV can be improved. This method can significantly improve the dynamic stroke of the suspension and the hub motor stator and rotor displacement during driving, improving the handling stability and ride comfort of the vehicle. Further, this method can reduce the probability of impact during vehicle driving and ensure the stable driving of a hub motor-driven EV.





The effect of the cutting parameters on the surface quality of FeCrBSi alloy remanufacturing coating were explored, with emphasis on the effect of the cutting speed, feed rate and rake angle on the surface roughness, surface morphology and residual stress redistribution. The results show that surface roughness of FeCrBSi alloy coating was enhanced with the increasing of cutting speed and decreasing of feed rate, and it can be seen from topography of the machined surface has obvious furrows, and the wave peaks and troughs fluctuate regularly along the feed direction. When cutting speed was 60 m/min, the states of residual stress were changed from the linear distribution of residual tensile stress to "spoon" shape of residual compressive stress with the increasing of feed rate from 0.06 mm/r to 0.12 mm/r. The influence on the residual stress is not obvious with increasing of feed rate at a cutting speed of 70 m/min. It found that the to increase the rake angle significantly affects the residual stress, and to increase the cutting speed significantly affects the maximum residual compressive stress. So the cutting parameters, vc=70 m/min, f=0.12 mm/r, ap=0.2 mm, γ0=(10°~ 15°)are the critical transition parameters for improving the surface quality.









The high-speed dry hobbing process has no cutting fluid and high cutting speed. Inappropriate process parameters will seriously affect processing energy consumption, quality and tool life. In order to solve the multi-objective optimization of processing parameter in hobbing, a multi-objective optimization model with minimum energy consumption, minimum mass error and maximum tool life as the goals is constructed, and a multi-objective genetic algorithm (NSGA-Ⅲ) and analytic hierarchy process are proposed. An optimized decision-making method combined with the superior and inferior solution distance ranking method (AHP-TOPSIS). The NSGA-Ⅲ algorithm based on reference points to optimize is used, and the AHP-TOPSIS combination method to dynamically calculate the weight of each evaluation index is done, the ranking of the pros and cons of the processing parameter solution set is completed, and which facilitates more efficient and reasonable optimization decisions.









In order to further improve the efficiency of design schemes and reduce human labor, through the automatic design of computers to achieve the purpose of quickly generating innovative styling design schemes, design model for automobile modeling with deep convolution generative adversarial networks (DCGAN) was proposed. The model builds the design solution data set of the basic product modeling module, and the design plan image quality was improved by using the deep learning DCGAN to train the data set. Finally, comparing the generated two different types of car styling schemes with the expert schemes for satisfaction, the results show that the scheme generated via the present model can get a score similar to the expert design scheme, the validity and rationality of the present model were proved.














Dynamic motion error is a crucial factor affecting the machining accuracy of CNC machine tools. However, it is challenging to study due to its time-varying, random and dynamic characteristics. Also, its generation mechanism is not clear, which seriously hinders the improvement of machine tool machining accuracy. To trace the dynamic motion error, a dynamic model of feed system based on electromechanical rigid-flexible coupling analysis and relative dynamic motion error traceability method are proposed in this study. By cutting circular specimens at different feed rates, the dynamic motion error caused by mechanical structure is separated based on the calibration results of the coordinate measuring machine (CMM) and the results of double ballbar (DBB) circular test. Meanwhile, based on the electromechanical rigid-flexible coupling dynamic model for simulation analysis, the coincidence between the simulation results and the experimental separation results is more than 70%. Hence the feasibility of the method and the accuracy of the dynamic model are verified.












Ni-Cr alloy can cause thermal damage to diamond thereby limit the further improvement of the machining performance of brazed diamond drills. A composite consisting of Ni-Cr alloy and Ce-rich alloy was proposed to prepare new brazed drill bits and samples. Drilling tests on vitrified titles were carried out. The morphology of brazed samples and drill bits after drilling were studied. Results show the surface morphology of brazed samples with the composite was better than that of counterparts with Ni-Cr alloy. The thermal residual stresses values of brazed diamonds with the composite containing 5% or 10% Ce-rich alloy were decreased by 9.7% or 16.1%, comparing with that of counterparts with Ni-Cr alloy. The tool life and the machining efficiency of brazed drill bit with the composite containing 5% Ce-rich alloy were increased 60% and 30.7%, respectively, comparing with that of counterparts with Ni-Cr alloy. The main wear forms were micro- and macro-fracture. Ce-rich alloy can reduce the thermal damage to diamonds caused by Ni-Cr alloy.










In order to improve the global optimality and dynamic obstacle avoidance ability of hadal lander 3D path planning, a global dynamic path planning method based on the fusion of improved ant colony optimization and artificial potential field algorithm is proposed. Based on the traditional ant colony algorithm, this paper improves the convergence response speed of the ant colony algorithm in 3D path planning by introducing the degree of path offset, optimizing the construction of heuristic functions, simplifying the grid map and optimizing the search space. On this basis, the key points in the global path generated by the improved ant colony algorithm were selected as continuous suborder punctuation points, and the potential field model function of global path planning by the artificial potential field was constructed. On the basis of ensuring the global optimal path, the smoothness of the path and local obstacle avoidance ability are improved. The effectiveness and superiority of this method were verified by an experimental example, which can provide help and reference for the planning and optimization of autonomous navigation of underwater robots and underwater equipment.
















In order to accurately reflect the time-varying fault characteristics of rolling bearings under variable speed conditions, a new fault diagnosis method based on Nonlinear Sparse Mode Decomposition (NSMD) and Local Maximum Synchrosqueezing Transform (LMSST) is proposed in this paper. Firstly, the noisy vibration signal of rolling bearings is decomposed by NSMD, and the useful components are selected based on the maximum spectral correlation of each component; Then these useful components are treated again though LMSST analysis, and the time-varying fault features are extracted from the time-frequency plane, so as to realize the bearing fault diagnosis under variable speed conditions.











Aiming at the problems of missed detection and low recognition rate of small and medium-sized parts in industrial production, combined with the basic theory of deep learning, an improved YOLO(You Only Look Once)V3 network part target recognition algorithm is proposed. The algorithm first adds a feature scale to the part feature fusion structure information, and further fuses the feature information of the deep network and the shallow network to better integrate the position information and semantic information of the part. In order to overcome the shortcoming of using K-means clustering in YOLOV3 algorithm that the initial value is unstable, according to the aspect ratio of different parts category, K-means++ algorithm is used to re-cluster the Anchor box. Finally, the algorithm was verified by experiments on data sets of the six self-made common parts. The results show that the recognition effect of the improved algorithm proposed is better than that of YOLOV3, and it has the advantage of high accuracy in target recognition and detection.







In order to realize automatic detection and classification of chemical pipeline weld surface defects, a machine vision detection method based on multi-feature extraction and binary tree support vector machine(BT-SVM)for multiclass classification was proposed. For normal weld line, porosity, bite edge, poor forming, welding penetration, welding tumor, six kinds of classification target, the image features of weld line were extracted by passive vision sensing technology and line laser visual sensing technology respectively. And those obtained parameters, such as weld line geometry features, the wave features of weld area, laser stripe features and so on, were used as input parameters of BT-SVM. Then the reasonable structure of the BT-SVM was designed to classify the six kinds of weld surface defects. The test results show that the designed BT-SVM classifier can accurately detect the type of welding defects with a recognition rate of 96.94%.















The realization method of the moveable base structure and the issue of the installation reliability for microstructures were studied. A point-contacted movable base structure composed of an upper connecting block, a steel ball and a lower connecting block was designed. An elastic support with L-shaped supporting arms was also designed. The base excitation device with PZT was fabricated. The dynamic measurement system for MEMS microstructures was developed. The excitation performance of the excitation device was tested. The dynamic characteristics of three typical microcantilevers were also tested. The results show that the base structure of the designed excitation device can be adaptively adjusted, and the deformation of the installation area for microstructures is greatly reduced. The excitation bandwidth of the excitation device can reach to 90 kHz. The excitation device has a good excitation performance.









The large output torque fluctuation during the electric impact wrench fastens bolts. Therefore, the paper proposes a torque control strategy of the electric impact wrench based on current parameters. Firstly, the experiment uses the signal acquisition system to synchronously collect the output torque signal and motor current signal of the wrench in the process of fastening bolts. The SG(Savitzky-Golay) filter was used to reduce the noise in the signal. Then, the paper uses the polynomial curve fitting to establish the polynomial relation between wrench output torque and motor current. The results show that the relation between the output torque of the electric impact wrench and the motor current is a third-order polynomial relation. Finally, experiments are carried out to verify the results. The experimental results show that the torque control of the electric impact wrench is achieved by controlling the motor current and that the control error is less than 4%, thus improving the control accuracy and robustness of the electric impact wrench torque control system.










The existence of the gap brings great hazards to the safety of the aviation structure. The gap will affect the rotation frequency of the control surface, and the nonlinear effect of the gap can be effectively overcome by applying preloading to the control surface, then the rotation frequency of the control surface will be measured. In terms of the statics principle, a preloading system is designed and manufactured to overcome the gap of control surface, and a method for measuring the rotation frequency of control surface with preloading gap is established. Experimental results show that the proposed method can effectively measure the rotation frequency of the control surface of aircraft.







