Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2021 Vol. 40, No. 8
Display Method:
2021, 40(8): 1149-1157.
doi: 10.13433/j.cnki.1003-8728.20200192
 PDF 3418KB
PDF 3418KB
Abstract:
To deal with the influence of the fluctuating wind excitation of the external environment on the dynamic coupling performance of a pantograph-catenary system, a variable universe fuzzy fractional-order PID active pantograph control method was proposed. The simplified pantograph-catenary model under fluctuating wind excitation was modified. The buffeting force generated by the fluctuating wind excitation of the contact wire was analyzed, and the contact force of the pantograph-catenary system under different wind attack angles and wind speed was obtained. The contact force error and the error change rate are used as inputs of the variable universe fuzzy fractional PID control, and the PID parameters are adjusted in real time. The fuzzy control variable-universe is adjusted with the contraction-expansion factor, improving the accuracy of the fuzzy control. The fractional calculus operator is rationalized with the Oustaloup filter to improve the flexibility of the PID controller. The simulation results show that the designed controller can effectively reduce the fluctuation of contact force under the wind environment and the off-line rate, thus improving the robustness of the pantograph-catenary system.
To deal with the influence of the fluctuating wind excitation of the external environment on the dynamic coupling performance of a pantograph-catenary system, a variable universe fuzzy fractional-order PID active pantograph control method was proposed. The simplified pantograph-catenary model under fluctuating wind excitation was modified. The buffeting force generated by the fluctuating wind excitation of the contact wire was analyzed, and the contact force of the pantograph-catenary system under different wind attack angles and wind speed was obtained. The contact force error and the error change rate are used as inputs of the variable universe fuzzy fractional PID control, and the PID parameters are adjusted in real time. The fuzzy control variable-universe is adjusted with the contraction-expansion factor, improving the accuracy of the fuzzy control. The fractional calculus operator is rationalized with the Oustaloup filter to improve the flexibility of the PID controller. The simulation results show that the designed controller can effectively reduce the fluctuation of contact force under the wind environment and the off-line rate, thus improving the robustness of the pantograph-catenary system.















2021, 40(8): 1158-1163.
doi: 10.13433/j.cnki.1003-8728.20200196
Abstract:
Aiming at the problem that the joint axis is prone to residual vibration during the trajectory planning of the manipulator using traditional cubic spline interpolation, an improved cubic spline trajectory planning method with continuous third derivative is proposed. This interpolation method adds a correction factor to each cubic interval of cubic spline interpolation. The correction factor in the first segmented interval is a fifth-order function, which solves the problem that the joint′s initial acceleration is not zero. The remaining segmented intervals are all sixth-order functions, which solved the problem of discontinuous third derivatives and non-zero acceleration of the end position. This interpolation method is used to trajectory planning simulation of the six-joint axis manipulator with twenty nodes. The results show that the improved spline interpolation method obtains a continuous third derivative trajectory in the trajectory planning of the manipulator, which effectively reduces the residual vibration of the joint axis.
Aiming at the problem that the joint axis is prone to residual vibration during the trajectory planning of the manipulator using traditional cubic spline interpolation, an improved cubic spline trajectory planning method with continuous third derivative is proposed. This interpolation method adds a correction factor to each cubic interval of cubic spline interpolation. The correction factor in the first segmented interval is a fifth-order function, which solves the problem that the joint′s initial acceleration is not zero. The remaining segmented intervals are all sixth-order functions, which solved the problem of discontinuous third derivatives and non-zero acceleration of the end position. This interpolation method is used to trajectory planning simulation of the six-joint axis manipulator with twenty nodes. The results show that the improved spline interpolation method obtains a continuous third derivative trajectory in the trajectory planning of the manipulator, which effectively reduces the residual vibration of the joint axis.







2021, 40(8): 1164-1170.
doi: 10.13433/j.cnki.1003-8728.20200200
Abstract:
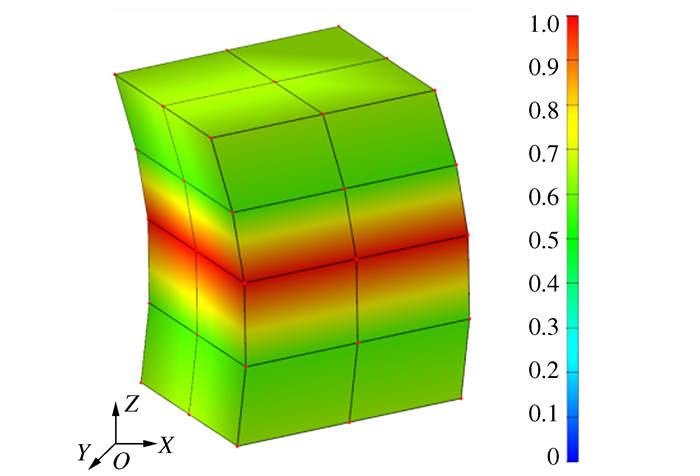
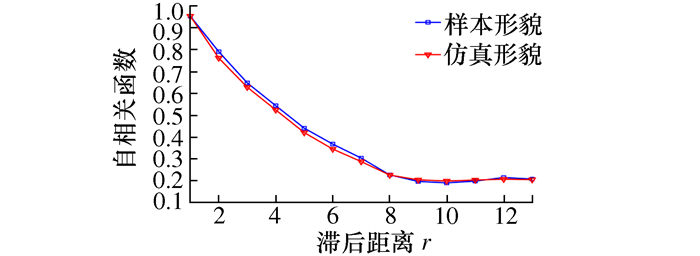
Although the height distribution and auto-correlation distribution can be satisfied, local topography cannot be predicted and controlled in the simulation of surface topography, in terms of the random process theory. This brings difficulties to the effective prediction of interface performance. To address the problem, an active reconstruction method of randomly reconstructed topography is introduced on the basis of the equivalence of height distribution and auto-correlation distribution. To do this, the interested sampling points are set as target points for height exchange, and the points adjacent to the interested sampling points, are chosen as common points for height rearrangement. Besides, the surface statistical characteristics, such as the slope and curvature distribution, are taken as the simulation constraints. Two implementation algorithms and their effectiveness are studied, and the application to contact analysis of the present method are discussed briefly.
Although the height distribution and auto-correlation distribution can be satisfied, local topography cannot be predicted and controlled in the simulation of surface topography, in terms of the random process theory. This brings difficulties to the effective prediction of interface performance. To address the problem, an active reconstruction method of randomly reconstructed topography is introduced on the basis of the equivalence of height distribution and auto-correlation distribution. To do this, the interested sampling points are set as target points for height exchange, and the points adjacent to the interested sampling points, are chosen as common points for height rearrangement. Besides, the surface statistical characteristics, such as the slope and curvature distribution, are taken as the simulation constraints. Two implementation algorithms and their effectiveness are studied, and the application to contact analysis of the present method are discussed briefly.











2021, 40(8): 1171-1176.
doi: 10.13433/j.cnki.1003-8728.20200247
Abstract:
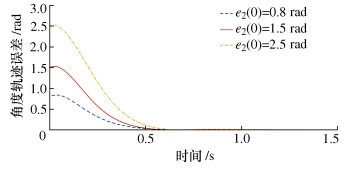
The tracking error convergence rate is easily affected by the size of initial tracking error when the manipulator terminal is controlled for tracking a given trajectory. Aiming at this problem, an improved fixed-time sliding mode trajectory tracking control strategy suitable for the manipulator model is designed in this paper. Based on the fast terminal sliding mode surface, a fixed time sliding mode surface is designed, so that the controller has fixed time convergence and is proved. Aiming at the characteristic of sliding mode control with chattering, this paper improves the approach law of sliding mode controller to suppress chattering, so that the approach law has some adaptability. Through the simulation experiment of the two-degree-of-freedom manipulator, it is verified that the improved fixed-time sliding mode controller designed in this paper can make the trajectory tracking error of the manipulator end converge rapidly within a fixed time and achieve a faster convergence rate by adjusting the controller parameters under the condition of unknown disturbance. The simulation results show that the convergence rate of the proposed method is faster than that of the fast terminal sliding mode control method.
The tracking error convergence rate is easily affected by the size of initial tracking error when the manipulator terminal is controlled for tracking a given trajectory. Aiming at this problem, an improved fixed-time sliding mode trajectory tracking control strategy suitable for the manipulator model is designed in this paper. Based on the fast terminal sliding mode surface, a fixed time sliding mode surface is designed, so that the controller has fixed time convergence and is proved. Aiming at the characteristic of sliding mode control with chattering, this paper improves the approach law of sliding mode controller to suppress chattering, so that the approach law has some adaptability. Through the simulation experiment of the two-degree-of-freedom manipulator, it is verified that the improved fixed-time sliding mode controller designed in this paper can make the trajectory tracking error of the manipulator end converge rapidly within a fixed time and achieve a faster convergence rate by adjusting the controller parameters under the condition of unknown disturbance. The simulation results show that the convergence rate of the proposed method is faster than that of the fast terminal sliding mode control method.






2021, 40(8): 1177-1185.
doi: 10.13433/j.cnki.1003-8728.20200321
Abstract:
The performance analysis of a new asymmetric parallel mechanism 2-SPR/RCU with 2R1T degrees of freedom is carried out to determine whether it can be applied to the field of medical rehabilitation. Firstly, the closed-loop vector method is used to calculate the kinematics inverse solution of the mechanism, and the particle swarm optimization algorithm is used to verify the correctness of the results. Then, the first-order influence coefficient method is used to obtain the velocity relation and the velocity Jacobian matrix, and the ADAMS software is used to perform the simulation analysis of kinematic performance, and the simulated displacement, velocity, acceleration change curves are smooth and stable. Finally, the dexterity is analyzed with the local condition number LCI as the evaluation index, and the dexterity performance map of the organization on the local condition number LCI is obtained. The results show that the asymmetric parallel mechanism has excellent motion performance and transmission performance, and has certain application prospects in the field of medical rehabilitation with high accuracy requirements and small cumulative position errors, and the specific application is a human cervical vertebra rehabilitation mechanism.
The performance analysis of a new asymmetric parallel mechanism 2-SPR/RCU with 2R1T degrees of freedom is carried out to determine whether it can be applied to the field of medical rehabilitation. Firstly, the closed-loop vector method is used to calculate the kinematics inverse solution of the mechanism, and the particle swarm optimization algorithm is used to verify the correctness of the results. Then, the first-order influence coefficient method is used to obtain the velocity relation and the velocity Jacobian matrix, and the ADAMS software is used to perform the simulation analysis of kinematic performance, and the simulated displacement, velocity, acceleration change curves are smooth and stable. Finally, the dexterity is analyzed with the local condition number LCI as the evaluation index, and the dexterity performance map of the organization on the local condition number LCI is obtained. The results show that the asymmetric parallel mechanism has excellent motion performance and transmission performance, and has certain application prospects in the field of medical rehabilitation with high accuracy requirements and small cumulative position errors, and the specific application is a human cervical vertebra rehabilitation mechanism.










2021, 40(8): 1186-1192.
doi: 10.13433/j.cnki.1003-8728.20200195
Abstract:
To understand the complex coupling characteristics of a dynamic stabilization unit-track coupling dynamic model, the complex nonlinear dynamic system of a dynamic stabilization-track coupling system based on the bond graph theory was established. In order to better demonstrate the actual working state of the dynamic stability device, the problems of the degree of freedom of the dynamic stabilization unit during continuous operation, roller-rail Hertz non-linear contact, roller-rail contact angle and roller-rail gap were analyzed in detail. A complete bond graph model of the coupling system between dynamic stabilizer and track was established by applying the bond graph theory and the Euler beam theory. The theoretical model was proven to be correct by the comparing the field operation test data of the dynamic stability vehicle in its time domain and frequency domain, which can be applied to analyzing the dynamic characteristics of a dynamic stability device with different excitation frequencies.
To understand the complex coupling characteristics of a dynamic stabilization unit-track coupling dynamic model, the complex nonlinear dynamic system of a dynamic stabilization-track coupling system based on the bond graph theory was established. In order to better demonstrate the actual working state of the dynamic stability device, the problems of the degree of freedom of the dynamic stabilization unit during continuous operation, roller-rail Hertz non-linear contact, roller-rail contact angle and roller-rail gap were analyzed in detail. A complete bond graph model of the coupling system between dynamic stabilizer and track was established by applying the bond graph theory and the Euler beam theory. The theoretical model was proven to be correct by the comparing the field operation test data of the dynamic stability vehicle in its time domain and frequency domain, which can be applied to analyzing the dynamic characteristics of a dynamic stability device with different excitation frequencies.













2021, 40(8): 1193-1203.
doi: 10.13433/j.cnki.1003-8728.20200201
Abstract:
In order to solve the problem of loss of motion ability due to overturning and instability during the movement of a mobile robot, a multi-mode omnidirectional ground mobile robot with a deformable structure is proposed. A single-ring full R closed chain is used as the unit, and the three-direction geometric deformation is realized by controlling its rotating pair in time sharing. The 4-RRRRRR parallel mobile robot formed by two closed chains orthogonally has four different rolling modes, and each mode can be switched from one to another. Once the mobile robot is overturned and unstable during its movement, it may be deformed into other modes and continue to move. The mechanism′s degree of freedom, gait planning and motion feasibility of each model′s virtual prototype are simulated and analyzed. The results show that the robot can achieve various motion modes and can switch from one to another, thus having a good ability to cross over obstacles.
In order to solve the problem of loss of motion ability due to overturning and instability during the movement of a mobile robot, a multi-mode omnidirectional ground mobile robot with a deformable structure is proposed. A single-ring full R closed chain is used as the unit, and the three-direction geometric deformation is realized by controlling its rotating pair in time sharing. The 4-RRRRRR parallel mobile robot formed by two closed chains orthogonally has four different rolling modes, and each mode can be switched from one to another. Once the mobile robot is overturned and unstable during its movement, it may be deformed into other modes and continue to move. The mechanism′s degree of freedom, gait planning and motion feasibility of each model′s virtual prototype are simulated and analyzed. The results show that the robot can achieve various motion modes and can switch from one to another, thus having a good ability to cross over obstacles.





























2021, 40(8): 1204-1209.
doi: 10.13433/j.cnki.1003-8728.20200208
Abstract:
The selective catalytic reduction technology that uses urea as reduction agent is well applied to the treatment of nitrogen oxides in the exhaust of a diesel engine, but the urea crystallization problem always exists. In order to effectively solve the crystallization problem, a new short-pitch spiral hybrid structure was designed. Firstly, the urea decomposition capacity and anti-crystallization performance of the old and new mixers were analyzed through simulation. The crystallization performance of the new mixer′s structure was further verified through experiments. The results show that the new hybrid structure can effectively improve the anti-crystallization performance and has a higher critical urea injection capacity without crystallization risk. The purpose of this study is to improve the crystallization performance by optimizing the mixer′s structural design.
The selective catalytic reduction technology that uses urea as reduction agent is well applied to the treatment of nitrogen oxides in the exhaust of a diesel engine, but the urea crystallization problem always exists. In order to effectively solve the crystallization problem, a new short-pitch spiral hybrid structure was designed. Firstly, the urea decomposition capacity and anti-crystallization performance of the old and new mixers were analyzed through simulation. The crystallization performance of the new mixer′s structure was further verified through experiments. The results show that the new hybrid structure can effectively improve the anti-crystallization performance and has a higher critical urea injection capacity without crystallization risk. The purpose of this study is to improve the crystallization performance by optimizing the mixer′s structural design.







2021, 40(8): 1210-1213.
doi: 10.13433/j.cnki.1003-8728.20200203
Abstract:
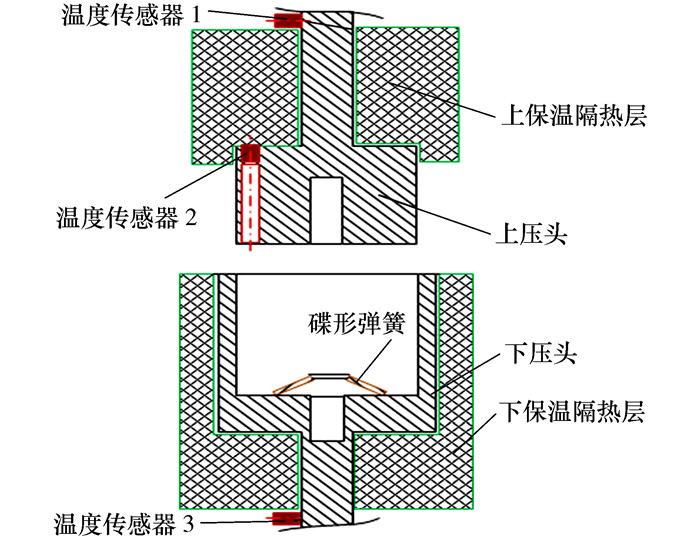
In order to meet the design and selection requirements of cryogenic wind tunnels, the characteristic curves of disc spring at 110 K is studied. The experimental scheme is determined via finite element method. A low temperature testing platform with insulation function is designed and constructed based on the electronic universal testing machine. The characteristic curves of several disc springs at normal and low temperature are obtained. The test results show that the low temperature load when loading of disc spring is higher than the normal temperature load, and the low temperature load of disc spring is firstly higher than then lower than its normal temperature load, which provides the basis for applying to low temperature wind tunnel and other low temperature environment.
In order to meet the design and selection requirements of cryogenic wind tunnels, the characteristic curves of disc spring at 110 K is studied. The experimental scheme is determined via finite element method. A low temperature testing platform with insulation function is designed and constructed based on the electronic universal testing machine. The characteristic curves of several disc springs at normal and low temperature are obtained. The test results show that the low temperature load when loading of disc spring is higher than the normal temperature load, and the low temperature load of disc spring is firstly higher than then lower than its normal temperature load, which provides the basis for applying to low temperature wind tunnel and other low temperature environment.




2021, 40(8): 1214-1224.
doi: 10.13433/j.cnki.1003-8728.20200211
Abstract:
In order to effectively identify the excitation force of a vibration system, based on the Kalman filter and the minimum variance estimation method, two time-domain identification methods of the excitation force with system displacement and acceleration as input parameters are established respectively. The identification formulas of these two methods are derived, and the identification results and robustness of the two methods are simulated and analyzed. The simulation results show that the two methods are insensitive to the initial setting of the variance of the noise. The recognition accuracy of the method with acceleration as input is better than the method with displacement as input. The robustness of the identification results of the method with displacement as input is better than the method with acceleration as input. Finally, the effectiveness and accuracy of the time-domain identification methods are verified by hammer knock test.
In order to effectively identify the excitation force of a vibration system, based on the Kalman filter and the minimum variance estimation method, two time-domain identification methods of the excitation force with system displacement and acceleration as input parameters are established respectively. The identification formulas of these two methods are derived, and the identification results and robustness of the two methods are simulated and analyzed. The simulation results show that the two methods are insensitive to the initial setting of the variance of the noise. The recognition accuracy of the method with acceleration as input is better than the method with displacement as input. The robustness of the identification results of the method with displacement as input is better than the method with acceleration as input. Finally, the effectiveness and accuracy of the time-domain identification methods are verified by hammer knock test.




























2021, 40(8): 1225-1232.
doi: 10.13433/j.cnki.1003-8728.20200198
Abstract:
Aiming at the abnormal vibration of the bumper of a commercial vehicle at idle speed, the dynamic resonance response mechanism, along with the structural analysis of the bumper, are studied. Through the dismantling test and the analysis of the vibration data on the associated vibration transmission path, the cause of the abnormal jitter of the bumper is determined. Then, based on the design index of bias frequency isolation and vibration reduction, the adaptive design of the bumper structure is improved to enhance the ability of frequency avoidance decoupling and vibration energy loss on the bumper structure. Carry out the modal analysis of the bumper structure and the actual vehicle test. The results show that the resonant frequency shifts significantly after the improvement and the vibration response at each measuring point of the bumper is attenuated obviously; the improvement scheme is effective, and the model is accurate and feasible.
Aiming at the abnormal vibration of the bumper of a commercial vehicle at idle speed, the dynamic resonance response mechanism, along with the structural analysis of the bumper, are studied. Through the dismantling test and the analysis of the vibration data on the associated vibration transmission path, the cause of the abnormal jitter of the bumper is determined. Then, based on the design index of bias frequency isolation and vibration reduction, the adaptive design of the bumper structure is improved to enhance the ability of frequency avoidance decoupling and vibration energy loss on the bumper structure. Carry out the modal analysis of the bumper structure and the actual vehicle test. The results show that the resonant frequency shifts significantly after the improvement and the vibration response at each measuring point of the bumper is attenuated obviously; the improvement scheme is effective, and the model is accurate and feasible.















2021, 40(8): 1233-1239.
doi: 10.13433/j.cnki.1003-8728.20200197
Abstract:
The main influence factors are analyzed and sorted on the vibration performance of rolling bearings under the conditions of variable working condition and multi-sensors. The data samples collected were mean-value-normalized and the probability density functions of the normalized samples were calculated with the maximum entropy method. Based on the probability density function-intersection method, the overlap areas of probability density functions were solved for load, speed and vibration data samples. The grey-bootstrap method and the maximum entropy method were fused to analyze the comprehensive influence degree of 4 temperature data samples on vibration performance of rolling bearing. Finally, the main influence factors were solved for vibration performance of rolling bearing. The experimental results show that the influence degrees of radial load, axial load, speed and temperature are 0.744 6, 0.291 0, 0.290 3 and 0.243 6 respectively on the vibration performance of the rolling bearing C276909NK2W1, which means the main influence factors of the bearing vibration performance is radial load, then the axial load, speed and temperature.
The main influence factors are analyzed and sorted on the vibration performance of rolling bearings under the conditions of variable working condition and multi-sensors. The data samples collected were mean-value-normalized and the probability density functions of the normalized samples were calculated with the maximum entropy method. Based on the probability density function-intersection method, the overlap areas of probability density functions were solved for load, speed and vibration data samples. The grey-bootstrap method and the maximum entropy method were fused to analyze the comprehensive influence degree of 4 temperature data samples on vibration performance of rolling bearing. Finally, the main influence factors were solved for vibration performance of rolling bearing. The experimental results show that the influence degrees of radial load, axial load, speed and temperature are 0.744 6, 0.291 0, 0.290 3 and 0.243 6 respectively on the vibration performance of the rolling bearing C276909NK2W1, which means the main influence factors of the bearing vibration performance is radial load, then the axial load, speed and temperature.













2021, 40(8): 1240-1246.
doi: 10.13433/j.cnki.1003-8728.20200202
Abstract:
A spindle system controlled by a servo motor was built on the wire electrical discharge machining tool, the effects of three different machining paths and different feed rates of the machining paths on the machining efficiency of tool were studied experimentally. The effect of the different translation distances on the spherical shape of tool was studied. The reasons for the optimization of efficiency and accuracy were analyzed. The experimental setup and machining strategies were established through the research provide a method for semispherical shape machining tools, and the improvement of machining efficiency and machining accuracy provides a method for manufacturing the present tools.
A spindle system controlled by a servo motor was built on the wire electrical discharge machining tool, the effects of three different machining paths and different feed rates of the machining paths on the machining efficiency of tool were studied experimentally. The effect of the different translation distances on the spherical shape of tool was studied. The reasons for the optimization of efficiency and accuracy were analyzed. The experimental setup and machining strategies were established through the research provide a method for semispherical shape machining tools, and the improvement of machining efficiency and machining accuracy provides a method for manufacturing the present tools.

























2021, 40(8): 1247-1256.
doi: 10.13433/j.cnki.1003-8728.20200204
Abstract:
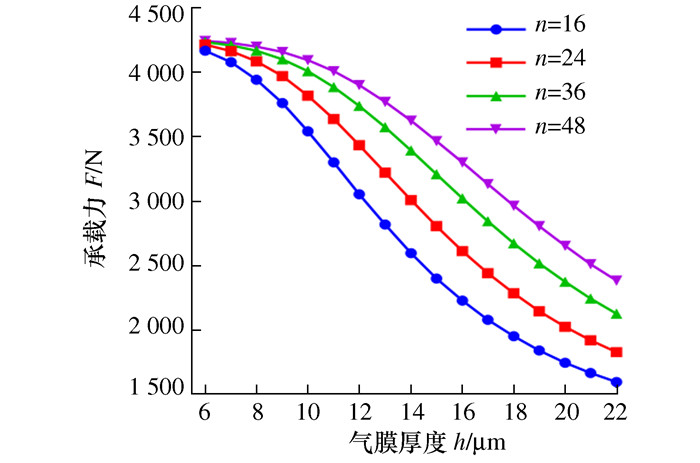
In order to improve the bearing capacity and static stiffness of hydrostatic thrust gas bearing with two rows of holes, circumferential annular pressure equalizing grooves are designed in this paper. The Fluent simulation results show that when the film thickness h=10 μm, the number of air supply holes n=16, the spacing between holes △d=25 mm, the ratio C=4.0, the width of equalizing groove d1=6 mm, the groove depth h1=0.02 mm, the orifice diameter d2=0.11 mm, and the hole depth h2=1.4 mm, the better static characteristics of the bearing can be guaranteed. The response curve of bearing capacity and its influence on the amplitude under different transitional dimensions are analyzed when the bearing surface is in harmonic vibration with the method of combination of steady-state and transient simulation. The simulation results show that under the same load change, increasing d1, decreasing h1, decreasing d2 and increasing h2 can restrain the amplitude of micro vibration to a certain extent, thus improving the bearing stability.
In order to improve the bearing capacity and static stiffness of hydrostatic thrust gas bearing with two rows of holes, circumferential annular pressure equalizing grooves are designed in this paper. The Fluent simulation results show that when the film thickness h=10 μm, the number of air supply holes n=16, the spacing between holes △d=25 mm, the ratio C=4.0, the width of equalizing groove d1=6 mm, the groove depth h1=0.02 mm, the orifice diameter d2=0.11 mm, and the hole depth h2=1.4 mm, the better static characteristics of the bearing can be guaranteed. The response curve of bearing capacity and its influence on the amplitude under different transitional dimensions are analyzed when the bearing surface is in harmonic vibration with the method of combination of steady-state and transient simulation. The simulation results show that under the same load change, increasing d1, decreasing h1, decreasing d2 and increasing h2 can restrain the amplitude of micro vibration to a certain extent, thus improving the bearing stability.



























2021, 40(8): 1257-1263.
doi: 10.13433/j.cnki.1003-8728.20200199
Abstract:
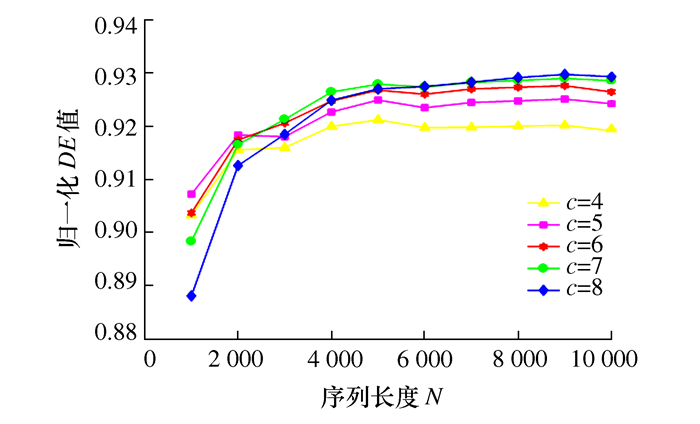
In order to make full use of the characteristic information of vibration signal for fault identification, a rolling bearing fault diagnosis method combining with smoothness priors approach (SPA) dispersion entropy and Gustafson-Kessel (GK) clustering was proposed in this paper. Firstly, the SPA algorithm was used to decompose the vibration signal of rolling bearings, and the trend and de-trend terms was obtained. Secondly, the dispersion entropy of the trend and de-trend was calculated to construct feature vectors. Finally, the feature vectors were input into the GK classifier for clustering and recognized. The proposed method was applied to the experimental data of rolling bearing in different working conditions. The results show that compared with the traditional fault diagnosis methods based on empirical mode decomposition (EMD) dispersion entropy and GK clustering, the proposed method can accurately achieve fault diagnosis of rolling bearings.
In order to make full use of the characteristic information of vibration signal for fault identification, a rolling bearing fault diagnosis method combining with smoothness priors approach (SPA) dispersion entropy and Gustafson-Kessel (GK) clustering was proposed in this paper. Firstly, the SPA algorithm was used to decompose the vibration signal of rolling bearings, and the trend and de-trend terms was obtained. Secondly, the dispersion entropy of the trend and de-trend was calculated to construct feature vectors. Finally, the feature vectors were input into the GK classifier for clustering and recognized. The proposed method was applied to the experimental data of rolling bearing in different working conditions. The results show that compared with the traditional fault diagnosis methods based on empirical mode decomposition (EMD) dispersion entropy and GK clustering, the proposed method can accurately achieve fault diagnosis of rolling bearings.









2021, 40(8): 1264-1271.
doi: 10.13433/j.cnki.1003-8728.20200440
Abstract:
In order to satisfy the requirements for stability, independence and homogeneous design of a quad-stable digital electromagnetic actuator array, an optimization approach based on genetic algorithm has been proposed for the optimal design of the actuator array. An analytic model has been first created for static magnetic field analysis of the actuator array based on MATLAB software. Then, single-objective and multi-objective optimizations of the actuator array have been carried out respectively by using this model. The final optimal results have been analyzed and compared with the prototype design configuration. It has been observed that the three optimization objectives, namely Self-return zone, Interaction force and Vibration force, have been improved by 38.33%, 5.78% and 1.08% respectively.
In order to satisfy the requirements for stability, independence and homogeneous design of a quad-stable digital electromagnetic actuator array, an optimization approach based on genetic algorithm has been proposed for the optimal design of the actuator array. An analytic model has been first created for static magnetic field analysis of the actuator array based on MATLAB software. Then, single-objective and multi-objective optimizations of the actuator array have been carried out respectively by using this model. The final optimal results have been analyzed and compared with the prototype design configuration. It has been observed that the three optimization objectives, namely Self-return zone, Interaction force and Vibration force, have been improved by 38.33%, 5.78% and 1.08% respectively.











2021, 40(8): 1272-1278.
doi: 10.13433/j.cnki.1003-8728.20200206
Abstract:
M-EHA(Magnetostrictive Electro Hydrostatic Actuator)is a highly integrated electro-static hydrostatic actuator driven by GMM material, in which the performance of M-EHA is affected by many factors, and its theoretical analysis is complicated. In order to study the dynamic output displacement of the actuator in the time domain, a new M-EHA design method is proposed and a principle prototype is developed. In order to meet the relevant requirements involved in the actuator test process, the relevant structures of the actuator were optimized and the experimental platform was set up; a new type of reed valve cavity structure was proposed to effectively improve the performance of the entire valve. A ball stud prestressing device was designed, which not only protects the drive unit, but also can test the output performance of M-EHA under different prestresses; the output displacement characteristics of M-EHA were experimentally studied under different operating frequencies, and the output speed characteristics of the actuator were experimentally studied under different bias pressures.
M-EHA(Magnetostrictive Electro Hydrostatic Actuator)is a highly integrated electro-static hydrostatic actuator driven by GMM material, in which the performance of M-EHA is affected by many factors, and its theoretical analysis is complicated. In order to study the dynamic output displacement of the actuator in the time domain, a new M-EHA design method is proposed and a principle prototype is developed. In order to meet the relevant requirements involved in the actuator test process, the relevant structures of the actuator were optimized and the experimental platform was set up; a new type of reed valve cavity structure was proposed to effectively improve the performance of the entire valve. A ball stud prestressing device was designed, which not only protects the drive unit, but also can test the output performance of M-EHA under different prestresses; the output displacement characteristics of M-EHA were experimentally studied under different operating frequencies, and the output speed characteristics of the actuator were experimentally studied under different bias pressures.













2021, 40(8): 1279-1284.
doi: 10.13433/j.cnki.1003-8728.20200205
Abstract:
To study the dynamic characterization of the railway wagon under wheel flat condition, and provide theoretical support for the indirect identification of flat fault, a C80 railway wagon dynamic model with K6 bogie is established, and the formulas of vertical impact force and vibration acceleration of adapter which under the impact of flat has been derived. The responses of wheel and rail force and adapter vibration under flat fault are studied. What's more, the relationship between the length of the flat and the vertical force of the wheel and rail under the fault state is analyzed, which can provides the basic support for the fault detection and identification of the flat. The results show that: the vertical force of wheel and rail is proportional to the length of the flat, and the maximum of wheel and rail force increases first and then decreases slowly with the increase of vehicle speed. The adapter acceleration has a same change trend with the vertical force of wheel and rail.
To study the dynamic characterization of the railway wagon under wheel flat condition, and provide theoretical support for the indirect identification of flat fault, a C80 railway wagon dynamic model with K6 bogie is established, and the formulas of vertical impact force and vibration acceleration of adapter which under the impact of flat has been derived. The responses of wheel and rail force and adapter vibration under flat fault are studied. What's more, the relationship between the length of the flat and the vertical force of the wheel and rail under the fault state is analyzed, which can provides the basic support for the fault detection and identification of the flat. The results show that: the vertical force of wheel and rail is proportional to the length of the flat, and the maximum of wheel and rail force increases first and then decreases slowly with the increase of vehicle speed. The adapter acceleration has a same change trend with the vertical force of wheel and rail.








2021, 40(8): 1285-1292.
doi: 10.13433/j.cnki.1003-8728.20200194
Abstract:
In view of the long calculation cycle of traditional lightweight methods of automobile seat, a lightweight design method of automobile seats based on the surrogate models is proposed. Firstly, the model for a passenger automobile seat collision test is built and verified by the collision test. Then combined with the optimized Latin hypercube experimental design, the thickness of six seat parts and three material types were taken as the design variables, and the sample points were approximately fitted based on the surrogate models. Finally, with the minimum mass, the maximum frequency of the first order as the target, the maximum dive volume of the dummy and the backrest Angle as the constraint, the particle swarm optimization algorithm was used for multi-objective optimization. The results show that comparing with the optimization results of Kriging model, based on the optimal surrogate models, the automobile seat weight reduced by 0.74 kg and 36%, the first-order mode frequency increased by 1.39 Hz, and the calculation cycle shortened by 80%.
In view of the long calculation cycle of traditional lightweight methods of automobile seat, a lightweight design method of automobile seats based on the surrogate models is proposed. Firstly, the model for a passenger automobile seat collision test is built and verified by the collision test. Then combined with the optimized Latin hypercube experimental design, the thickness of six seat parts and three material types were taken as the design variables, and the sample points were approximately fitted based on the surrogate models. Finally, with the minimum mass, the maximum frequency of the first order as the target, the maximum dive volume of the dummy and the backrest Angle as the constraint, the particle swarm optimization algorithm was used for multi-objective optimization. The results show that comparing with the optimization results of Kriging model, based on the optimal surrogate models, the automobile seat weight reduced by 0.74 kg and 36%, the first-order mode frequency increased by 1.39 Hz, and the calculation cycle shortened by 80%.













2021, 40(8): 1293-1298.
doi: 10.13433/j.cnki.1003-8728.20200193
Abstract:
In order to study the mean compression stress of honeycomb with holes in wall under quasi-static out of plane compression, in terms of the simplified super folding element theory, the calculation formula of the mean compression stress of honeycomb structure with holes in wall was derived by taking the "Y" type cell as the objective. By establishing the finite element model for the hole to edge ratio, the influence factor of the extended area in the calculation formula of the mean compression stress was determined. The influence factor of the extended area at a scale factor of 1 has a linear relation with the hole to edge ratio. The accuracy of the theoretical formula is verified by calculating the mean compression stress of the honeycomb with different thickness to edge ratio, and the influence of the hole shape and scale factor on the mean compression stress was discussed. The results showed that the mean compression stress of the honeycomb with holes in wall was mainly affected by the strand and the extended area, and the mean compression stress decreased with the increasing of hole-side ratio. The extension area decreased with the increasing of scale factor, and comparing with a scale factor of 1, the mean compression stress decreased about 40% while the increase in the scale factor made the compression process be more stable.
In order to study the mean compression stress of honeycomb with holes in wall under quasi-static out of plane compression, in terms of the simplified super folding element theory, the calculation formula of the mean compression stress of honeycomb structure with holes in wall was derived by taking the "Y" type cell as the objective. By establishing the finite element model for the hole to edge ratio, the influence factor of the extended area in the calculation formula of the mean compression stress was determined. The influence factor of the extended area at a scale factor of 1 has a linear relation with the hole to edge ratio. The accuracy of the theoretical formula is verified by calculating the mean compression stress of the honeycomb with different thickness to edge ratio, and the influence of the hole shape and scale factor on the mean compression stress was discussed. The results showed that the mean compression stress of the honeycomb with holes in wall was mainly affected by the strand and the extended area, and the mean compression stress decreased with the increasing of hole-side ratio. The extension area decreased with the increasing of scale factor, and comparing with a scale factor of 1, the mean compression stress decreased about 40% while the increase in the scale factor made the compression process be more stable.












2021, 40(8): 1299-1304.
doi: 10.13433/j.cnki.1003-8728.20200460
Abstract:
The quasi-static compression of metal rubber was analyzed according to the characteristics of mesoscopic contact and stress deformation of metal rubber. Starting from the micro element of metal rubber to single turn spiral coil of the basic mechanical unit, according to the geometric relationships between the single turn spiral coil and the beam, and the parallel relationship among the unit of spiral coil series, the constitutive model for the simple-supported metal rubber with different processing parameters is put forward, at the same time, the error analysis is compared with the cantilever beam model and the porous model. Results show that the error via the simply supported beam model is smaller than that via the cantilever beam and porous models comparing with the experimental, so the beam constitutive model can better reflect the static mechanical performance of metal rubber, at the same time, the model can reflect the wire diameter, wire, spiral coil diameter, relative density and so on the influence of factors on the properties of metal rubber nonlinear mechanics, for metal rubber provide theoretical basis.
The quasi-static compression of metal rubber was analyzed according to the characteristics of mesoscopic contact and stress deformation of metal rubber. Starting from the micro element of metal rubber to single turn spiral coil of the basic mechanical unit, according to the geometric relationships between the single turn spiral coil and the beam, and the parallel relationship among the unit of spiral coil series, the constitutive model for the simple-supported metal rubber with different processing parameters is put forward, at the same time, the error analysis is compared with the cantilever beam model and the porous model. Results show that the error via the simply supported beam model is smaller than that via the cantilever beam and porous models comparing with the experimental, so the beam constitutive model can better reflect the static mechanical performance of metal rubber, at the same time, the model can reflect the wire diameter, wire, spiral coil diameter, relative density and so on the influence of factors on the properties of metal rubber nonlinear mechanics, for metal rubber provide theoretical basis.









2021, 40(8): 1305-1312.
doi: 10.13433/j.cnki.1003-8728.20200207
Abstract:
In order to accurately identify the virtual material parameters of the fixed joint interface of basalt fiber polymer concrete(BFPC), based on the two degree of freedom system spring-damping dynamic models, the dynamics characteristics parameter mathematical model for the fixed joint surfaces of the BFPC was established, and the dynamics characteristics parameter of the BFPC joint surfaces under different surfaces roughness and pressures of the 9 sets are determined by the experiments. The dynamic characteristic parameter model for the virtual material of the BFPC joint surfaces was established in terms of the transversely isotropic Hertz contact theory and the fractal theory of the fixed joint surfaces, and the parameters of the virtual materials under different surface roughness and joint pressures were identified by combining the experimental results. The correctness of the identification method of the virtual material parameters of the BFPC fixed joint surface is proved by comparing the principal and natural frequency theoretical analysis and the finite element simulation analysis result of the BFPC combination surface model.
In order to accurately identify the virtual material parameters of the fixed joint interface of basalt fiber polymer concrete(BFPC), based on the two degree of freedom system spring-damping dynamic models, the dynamics characteristics parameter mathematical model for the fixed joint surfaces of the BFPC was established, and the dynamics characteristics parameter of the BFPC joint surfaces under different surfaces roughness and pressures of the 9 sets are determined by the experiments. The dynamic characteristic parameter model for the virtual material of the BFPC joint surfaces was established in terms of the transversely isotropic Hertz contact theory and the fractal theory of the fixed joint surfaces, and the parameters of the virtual materials under different surface roughness and joint pressures were identified by combining the experimental results. The correctness of the identification method of the virtual material parameters of the BFPC fixed joint surface is proved by comparing the principal and natural frequency theoretical analysis and the finite element simulation analysis result of the BFPC combination surface model.