


 Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2019 Vol. 38, No. 5
Display Method:
2019, 38(5): 657-669.
doi: 10.13433/j.cnki.1003-8728.20190068
 PDF 1229KB
PDF 1229KB
Abstract:
As a processing technology with broad application prospects, hard cutting is widely used in automobiles, molds and other industries due to its good processing flexibility, economy and environmental protection. The key to the successful implementation of the process is the rational selection of the tool and the extent to which its performance is achieved. The technology has developed rapidly in recent years, and the research of tools used in the hard cutting process has been conducted in-depth, the application of the process has been effectively promoted. This paper reviews the research results of blade structure, material selection, tool coating and other aspects of tools for hard cutting in recent years, and the typical tool types and their performances that are widely used is analyzed. The purpose in this paper is to provide guidance for selecting and designing tools for hard cutting processes.
As a processing technology with broad application prospects, hard cutting is widely used in automobiles, molds and other industries due to its good processing flexibility, economy and environmental protection. The key to the successful implementation of the process is the rational selection of the tool and the extent to which its performance is achieved. The technology has developed rapidly in recent years, and the research of tools used in the hard cutting process has been conducted in-depth, the application of the process has been effectively promoted. This paper reviews the research results of blade structure, material selection, tool coating and other aspects of tools for hard cutting in recent years, and the typical tool types and their performances that are widely used is analyzed. The purpose in this paper is to provide guidance for selecting and designing tools for hard cutting processes.




















2019, 38(5): 670-676.
doi: 10.13433/j.cnki.1003-8728.20180239
Abstract:
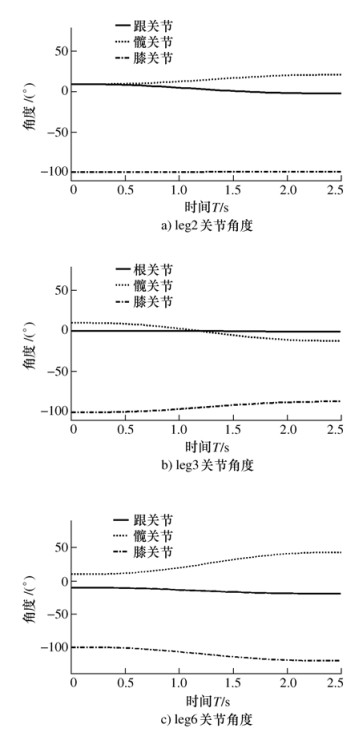
It is one of the important goals to realize the steady adjustment of robot body posture when the foot robot is used as a mobile platform to carry out material handling. In this paper, by analyzing the influencing factors of hexapod robot posture, the adjustable range of target posture is studied, the dynamic mapping relationship between the support leg joint and the robot body posture is established, and a smooth adjustment method for the robot target posture is proposed. The effectiveness of the robot posture adjustment method is verified by simulation.
It is one of the important goals to realize the steady adjustment of robot body posture when the foot robot is used as a mobile platform to carry out material handling. In this paper, by analyzing the influencing factors of hexapod robot posture, the adjustable range of target posture is studied, the dynamic mapping relationship between the support leg joint and the robot body posture is established, and a smooth adjustment method for the robot target posture is proposed. The effectiveness of the robot posture adjustment method is verified by simulation.







2019, 38(5): 677-683.
doi: 10.13433/j.cnki.1003-8728.20180238
Abstract:
The signal feature extraction of medium and low speed maglev train is one of the key technologies for the safe and reliable operation and fault diagnosis of the maglev train. The fast Fourier transform(FFT)and short time Fourier transform(STFT)are applied in the feature extraction for non-stationary characteristics of the maglev train. Using this way, not only the vibration signal can be analyzed from time domain, but also the characteristics of trains' operation can be analyzed from frequency domain. At the same time, the instantaneous characteristic of information can be obtained, with the extraction ability of nonstationary signal of maglev train improved, monitoring the real-time state and ensuring the safety and reliability of trains' operation accordingly. Based on the experiment of maglev train running on track, the real-time vibration signal of train is obtained. The vibration of car body is analyzed with FFT and STFT in 2 s (train crossing), 4 s (suspension working condition), 6 s (acceleration condition) and 8 s (braking working condition). The results show that the vibration and frequency components of the train are positively related to the train running speed; during the running of trains, the smoothness of the trains in the lateral and vertical directions has always been excellent.
The signal feature extraction of medium and low speed maglev train is one of the key technologies for the safe and reliable operation and fault diagnosis of the maglev train. The fast Fourier transform(FFT)and short time Fourier transform(STFT)are applied in the feature extraction for non-stationary characteristics of the maglev train. Using this way, not only the vibration signal can be analyzed from time domain, but also the characteristics of trains' operation can be analyzed from frequency domain. At the same time, the instantaneous characteristic of information can be obtained, with the extraction ability of nonstationary signal of maglev train improved, monitoring the real-time state and ensuring the safety and reliability of trains' operation accordingly. Based on the experiment of maglev train running on track, the real-time vibration signal of train is obtained. The vibration of car body is analyzed with FFT and STFT in 2 s (train crossing), 4 s (suspension working condition), 6 s (acceleration condition) and 8 s (braking working condition). The results show that the vibration and frequency components of the train are positively related to the train running speed; during the running of trains, the smoothness of the trains in the lateral and vertical directions has always been excellent.













2019, 38(5): 684-690.
doi: 10.13433/j.cnki.1003-8728.20180233
Abstract:
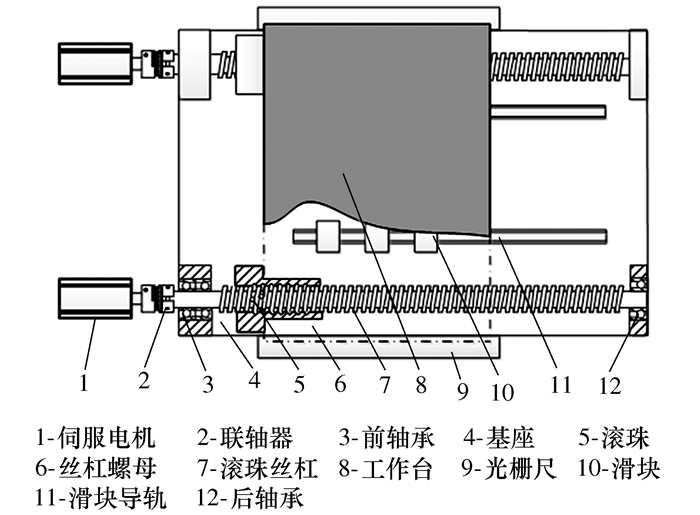
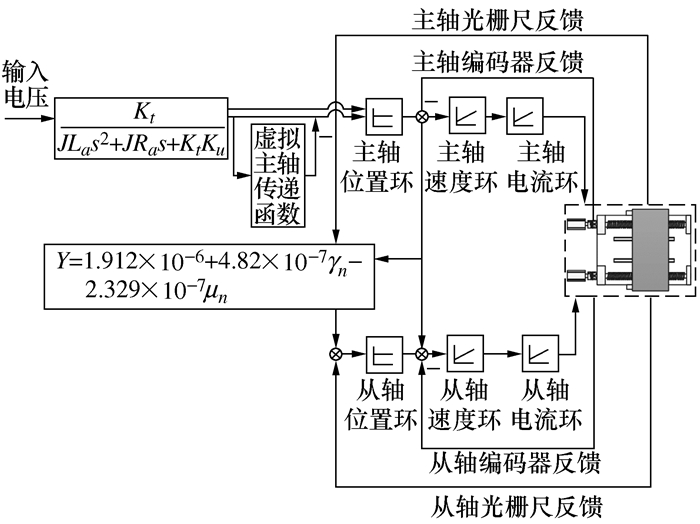
For the synchronous control problems in dual-drive feeding system, a new error compensation algorithm was designed in this paper. First, a dynamical model of double-nut ball screw system was established according to the joint stiffness of twin-screw. Then detection results of dual-drive feed synchronization error at different feed rates and displacements were used to get multiple linear regression models of dual-drive synchronization error, and further establishing dual-drive synchronous control error pre-compensation model by dynamic model and multiple linear regression models. Dual-drive feed experiments were made by self-developed dual-drive experimental platform. The impacts on dual-drive speed accuracy and synchronization accuracy of the traditional virtual spindle synchronization control method, master-slave synchronization control method and dual-drive synchronous control method with error pre-compensation were compared. Results show that the dual-drive synchronous feeding control method with error pre-compensation has the advantages of high synchronization, high running precision and good stability.
For the synchronous control problems in dual-drive feeding system, a new error compensation algorithm was designed in this paper. First, a dynamical model of double-nut ball screw system was established according to the joint stiffness of twin-screw. Then detection results of dual-drive feed synchronization error at different feed rates and displacements were used to get multiple linear regression models of dual-drive synchronization error, and further establishing dual-drive synchronous control error pre-compensation model by dynamic model and multiple linear regression models. Dual-drive feed experiments were made by self-developed dual-drive experimental platform. The impacts on dual-drive speed accuracy and synchronization accuracy of the traditional virtual spindle synchronization control method, master-slave synchronization control method and dual-drive synchronous control method with error pre-compensation were compared. Results show that the dual-drive synchronous feeding control method with error pre-compensation has the advantages of high synchronization, high running precision and good stability.











2019, 38(5): 691-697.
doi: 10.13433/j.cnki.1003-8728.20180221
Abstract:
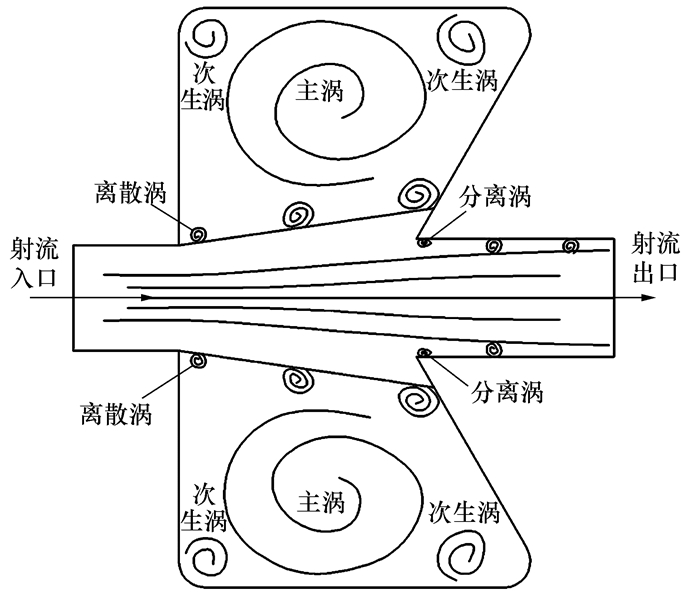
Based on the impulse effect of self-excited oscillation, the heat transfer effect of the heat exchanger tube is analyzed. The influence of changes in instantaneous vorticity on the flow field of the downstream flow channel is analyzed with the large eddy simulation numerical calculation method. The transient structure, heat transfer characteristics and resistance characteristics of the downstream flow channel with L*=d3/d2 are analyzed and evaluated with the comprehensive performance evaluation coefficient. The results show that the small vortices dispersed by the collision of the discrete vortex in the shear layer of the vibration cavity move downstream with the edge, thus inducing the new vortex generation. The change of L* can control the development of the pulsating shear layer. With the increase of L*, the strength of the stream-wise vortex first increases and then decreases, and the normal vortex gradually develops towards the pipe axis. By regulating L*, the heat transfer and resistance can be controlled. When 1.4 ≤ L* ≤ 1.8, the heat transfer efficiency is improved by 45.1% to 56.5%, and the comprehensive performance coefficient is up to 45.4%.
Based on the impulse effect of self-excited oscillation, the heat transfer effect of the heat exchanger tube is analyzed. The influence of changes in instantaneous vorticity on the flow field of the downstream flow channel is analyzed with the large eddy simulation numerical calculation method. The transient structure, heat transfer characteristics and resistance characteristics of the downstream flow channel with L*=d3/d2 are analyzed and evaluated with the comprehensive performance evaluation coefficient. The results show that the small vortices dispersed by the collision of the discrete vortex in the shear layer of the vibration cavity move downstream with the edge, thus inducing the new vortex generation. The change of L* can control the development of the pulsating shear layer. With the increase of L*, the strength of the stream-wise vortex first increases and then decreases, and the normal vortex gradually develops towards the pipe axis. By regulating L*, the heat transfer and resistance can be controlled. When 1.4 ≤ L* ≤ 1.8, the heat transfer efficiency is improved by 45.1% to 56.5%, and the comprehensive performance coefficient is up to 45.4%.









2019, 38(5): 698-703.
doi: 10.13433/j.cnki.1003-8728.20190066
Abstract:
Product color design plays an important role in shaping product style and corporate identity. In order to effectively assist industrial designers in product color design process and accurately reflect users' image perception of product color schemes, the interactive genetic algorithm was used and combined with users' cognition degree and fatigue degree in product color evaluation process, and a users' cognition noise model was proposed. By computing the similarity among evaluation value and color value of product color schemes respectively, the related parameters of cognition noise model were figured out and used for fitness adjustment of product color schemes which are given by users. The process of interactive product color design was put forward by integrating users' cognitive noise and interactive genetic algorithms. Taking the color design of electric iron as an example and comparing with the ordinary interactive genetic algorithms. Simulation results show that:1) knowledge background difference will significantly affect users' cognition of product color; 2) the convergence of color design process increased by 37.5%, and the average evolutionary algebra decreased by 2.4 generations. These results indicate that the proposed method could help to improve the convergence and evolution efficiency of interactive product color design.
Product color design plays an important role in shaping product style and corporate identity. In order to effectively assist industrial designers in product color design process and accurately reflect users' image perception of product color schemes, the interactive genetic algorithm was used and combined with users' cognition degree and fatigue degree in product color evaluation process, and a users' cognition noise model was proposed. By computing the similarity among evaluation value and color value of product color schemes respectively, the related parameters of cognition noise model were figured out and used for fitness adjustment of product color schemes which are given by users. The process of interactive product color design was put forward by integrating users' cognitive noise and interactive genetic algorithms. Taking the color design of electric iron as an example and comparing with the ordinary interactive genetic algorithms. Simulation results show that:1) knowledge background difference will significantly affect users' cognition of product color; 2) the convergence of color design process increased by 37.5%, and the average evolutionary algebra decreased by 2.4 generations. These results indicate that the proposed method could help to improve the convergence and evolution efficiency of interactive product color design.




2019, 38(5): 704-712.
doi: 10.13433/j.cnki.1003-8728.20180240
Abstract:
The relationship between robot joint space and working space is established by the forward kinematics equations. The forward kinematics analysis plays a key role in realizing the trajectory planning and control. The screw theory, which is simpler and more comprehensive than the D-H parameter method, is introduced. The kinematic analysis of the seven-DOF single-arm robot and the six-DOF dual-arm robot is carried out with the Product of Exponentials. The forward kinematics equation is established. The ADAMS software is applied for motion simulation. It is found that the simulation results are close to those obtained with the forward kinematics equation and that the error is less than 3 mm. The correctness of the forward kinematics equation established by combining the screw theory is verified. The MATLAB software is used to analyze the workspace. The comparison of the working space cloud map shows that the seven-DOF dual-arm robot has a larger workspace and that the seven-DOF double-arm robot with shoulder joints has a better kinematics performance.
The relationship between robot joint space and working space is established by the forward kinematics equations. The forward kinematics analysis plays a key role in realizing the trajectory planning and control. The screw theory, which is simpler and more comprehensive than the D-H parameter method, is introduced. The kinematic analysis of the seven-DOF single-arm robot and the six-DOF dual-arm robot is carried out with the Product of Exponentials. The forward kinematics equation is established. The ADAMS software is applied for motion simulation. It is found that the simulation results are close to those obtained with the forward kinematics equation and that the error is less than 3 mm. The correctness of the forward kinematics equation established by combining the screw theory is verified. The MATLAB software is used to analyze the workspace. The comparison of the working space cloud map shows that the seven-DOF dual-arm robot has a larger workspace and that the seven-DOF double-arm robot with shoulder joints has a better kinematics performance.











2019, 38(5): 713-720.
doi: 10.13433/j.cnki.1003-8728.20180243
Abstract:
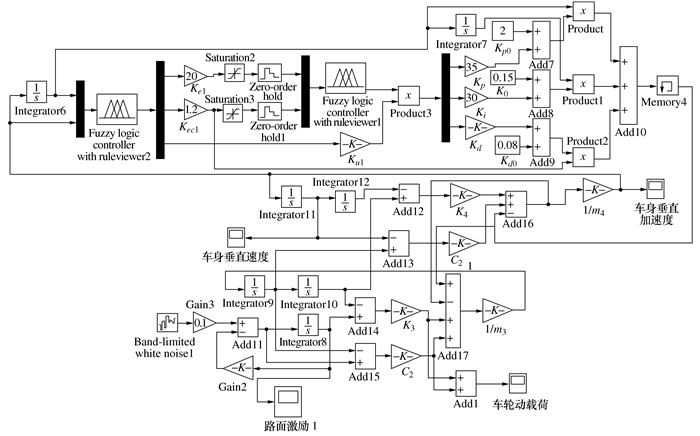
In order to improve the riding performance and comfort of a vehicle, an adaptive fuzzy PID control strategy for its active suspension based on the variable universe theory is proposed. The adaptive fuzzy PID control and on-line adjustment of variable universe are integrated. The fuzzy PID control based on the variable universe theory realizes the self-tuning of the I/O domain of the control system and improves the control accuracy. The adaptive fuzzy PID control is adopted to improve the dynamic and static characteristics of the control system and form a better suspension control method. The research results show that the variable universe adaptive fuzzy PID control of the active suspension can overcome road impact more effectively than the traditional fuzzy control and the fuzzy PID control active suspension, reducing the vertical vibration of the vehicle and further improving the riding performance and comfort of the vehicle.
In order to improve the riding performance and comfort of a vehicle, an adaptive fuzzy PID control strategy for its active suspension based on the variable universe theory is proposed. The adaptive fuzzy PID control and on-line adjustment of variable universe are integrated. The fuzzy PID control based on the variable universe theory realizes the self-tuning of the I/O domain of the control system and improves the control accuracy. The adaptive fuzzy PID control is adopted to improve the dynamic and static characteristics of the control system and form a better suspension control method. The research results show that the variable universe adaptive fuzzy PID control of the active suspension can overcome road impact more effectively than the traditional fuzzy control and the fuzzy PID control active suspension, reducing the vertical vibration of the vehicle and further improving the riding performance and comfort of the vehicle.











2019, 38(5): 721-729.
doi: 10.13433/j.cnki.1003-8728.20180208
Abstract:
Aiming at those problems of weak sensitivity for incipient fault, low stability for fault evolution process and information redundancy with short time and small sample, a novel feature extraction and incipient fault diagnosis method for rolling bearings is proposed based on big data-driven statistic trend analysis for fault evolution process and principal component and analysis (PCA) in this paper. A life-time data of rolling bearings in whole lifecycle are collected by various sensors, then statistic characteristics of original vibration data at each echo are calculated, thus those fault evolution trend curves described by all statistic characteristics would be built. Based on fault evolution trend curves, the stability and sensitivity of each feature for fault evolution trends can be calculated, thus the primary features can be selected. The relevancy and contribution of each feature in the primary features by PCA was obtained, thus redundancy feature would be further removed, and those features which can fully reflect fault evolution process will be furthermore choose. Finally, the life-time data of rolling bearings were used to verify the effectiveness of proposed methods. The results have shown that the standard deviation, mean frequency, standard deviation frequency can more sensitively detect incipient inner race of rolling bearings and comprehensive track their evolution process.
Aiming at those problems of weak sensitivity for incipient fault, low stability for fault evolution process and information redundancy with short time and small sample, a novel feature extraction and incipient fault diagnosis method for rolling bearings is proposed based on big data-driven statistic trend analysis for fault evolution process and principal component and analysis (PCA) in this paper. A life-time data of rolling bearings in whole lifecycle are collected by various sensors, then statistic characteristics of original vibration data at each echo are calculated, thus those fault evolution trend curves described by all statistic characteristics would be built. Based on fault evolution trend curves, the stability and sensitivity of each feature for fault evolution trends can be calculated, thus the primary features can be selected. The relevancy and contribution of each feature in the primary features by PCA was obtained, thus redundancy feature would be further removed, and those features which can fully reflect fault evolution process will be furthermore choose. Finally, the life-time data of rolling bearings were used to verify the effectiveness of proposed methods. The results have shown that the standard deviation, mean frequency, standard deviation frequency can more sensitively detect incipient inner race of rolling bearings and comprehensive track their evolution process.









2019, 38(5): 730-735.
doi: 10.13433/j.cnki.1003-8728.20180257
Abstract:
The grinding process is complex and has many influencing factors, which is easy to produce process fluctuations and affects the product quality. Aiming at the above-mentioned problem, a grinding modified-model based on the vector field smoothing algorithm (VFS) is proposed. Firstly, the correlation analysis method of grinding parameters based on the improved-mahalanobis distance is proposed. The multi-regression analysis method is used to construct the prediction model for grinding quality and the parameter sensitivity function is introduced to characterize the influence degree of the different parameters on the grinding quality, which can improve the accuracy of the method. Secondly, according to the correlation characteristics of parameters, the modified method of grinding process parameters is given based on the VFS algorithm, and the modified quality model and parameter planning can be carried out based on the new process parameters. Finally, the abrasive belt grinding experiments were carried out based on the robotic grinding platform. The results show that the process parameters based on the modified quality model can meet the quality requirements, which verified the effectiveness of the method.
The grinding process is complex and has many influencing factors, which is easy to produce process fluctuations and affects the product quality. Aiming at the above-mentioned problem, a grinding modified-model based on the vector field smoothing algorithm (VFS) is proposed. Firstly, the correlation analysis method of grinding parameters based on the improved-mahalanobis distance is proposed. The multi-regression analysis method is used to construct the prediction model for grinding quality and the parameter sensitivity function is introduced to characterize the influence degree of the different parameters on the grinding quality, which can improve the accuracy of the method. Secondly, according to the correlation characteristics of parameters, the modified method of grinding process parameters is given based on the VFS algorithm, and the modified quality model and parameter planning can be carried out based on the new process parameters. Finally, the abrasive belt grinding experiments were carried out based on the robotic grinding platform. The results show that the process parameters based on the modified quality model can meet the quality requirements, which verified the effectiveness of the method.


2019, 38(5): 736-741.
doi: 10.13433/j.cnki.1003-8728.20180236
Abstract:
The current evaluation of the fairing effect of a product is mainly based on qualitative analysis. To overcome the defects of the existing evaluation methods, such as subjectivity and low computation efficiency, a quantitative method is proposed. Firstly, the curve is translated to eliminate the influence of the coordinates. Secondly, the curve is faired by wavelet decomposition. Then the detail part is corrected by the correction coefficient α defined by the wavelets fairing scales. Finally, the corrected detail part and the scale part are used to construct the fairness quantity index λ, which is also called fairness factor. The fairing effect can be evaluated quantitatively by calculating the fairness factor λ. An engineering example is given to demonstrate that the method can be used as a reliable tool for evaluating the fairing effect of the product.
The current evaluation of the fairing effect of a product is mainly based on qualitative analysis. To overcome the defects of the existing evaluation methods, such as subjectivity and low computation efficiency, a quantitative method is proposed. Firstly, the curve is translated to eliminate the influence of the coordinates. Secondly, the curve is faired by wavelet decomposition. Then the detail part is corrected by the correction coefficient α defined by the wavelets fairing scales. Finally, the corrected detail part and the scale part are used to construct the fairness quantity index λ, which is also called fairness factor. The fairing effect can be evaluated quantitatively by calculating the fairness factor λ. An engineering example is given to demonstrate that the method can be used as a reliable tool for evaluating the fairing effect of the product.















2019, 38(5): 742-748.
doi: 10.13433/j.cnki.1003-8728.20180235
Abstract:
Aiming at the poor dimensional accuracy of the rapid prototyping workpiece, the four factors of stratification thickness, scanning speed, nozzle temperature and filling line width with the orthogonal test are studied. Combing the ratio response of signal to noise, the combinatorial optimization and the significance of the influencing factors are determined in the three directions of the dimension accuracy of the molded parts by means of the range method and variance analysis method. According to the multiple regression analysis, the model for predicting the single objective parameter optimal scheme is established. The experiments show that the optimal combination of the processing parameters can effectively improve the dimensional accuracy of the molded parts, and the establishment of the model for predicting the optimal scheme greatly improves the production efficiency. It provides a great help for selecting the processing parameters reasonably
Aiming at the poor dimensional accuracy of the rapid prototyping workpiece, the four factors of stratification thickness, scanning speed, nozzle temperature and filling line width with the orthogonal test are studied. Combing the ratio response of signal to noise, the combinatorial optimization and the significance of the influencing factors are determined in the three directions of the dimension accuracy of the molded parts by means of the range method and variance analysis method. According to the multiple regression analysis, the model for predicting the single objective parameter optimal scheme is established. The experiments show that the optimal combination of the processing parameters can effectively improve the dimensional accuracy of the molded parts, and the establishment of the model for predicting the optimal scheme greatly improves the production efficiency. It provides a great help for selecting the processing parameters reasonably



2019, 38(5): 749-753.
doi: 10.13433/j.cnki.1003-8728.20180237
Abstract:
The temperature change is an important factor to cause measurement error. For the four-axis noncontact coordinate measuring machine with vertical rotary table, it will make the location of the rotary table axial line to change with respect to the original point of measuring machine. So the coordinate system based on the rotary table will be translated, and this will bring the measurement error. In order to measure the offset of the coordinate system, the method of measuring cylinder for table rotating with multi angle and the method of measuring cylinder for table not rotating with single angle are compared. At last, the optical probe method to measure the axial line of standard cylinder without the rotary table rotating is used. Then the measuring data can be compensated to improve the accuracy of measurement.
The temperature change is an important factor to cause measurement error. For the four-axis noncontact coordinate measuring machine with vertical rotary table, it will make the location of the rotary table axial line to change with respect to the original point of measuring machine. So the coordinate system based on the rotary table will be translated, and this will bring the measurement error. In order to measure the offset of the coordinate system, the method of measuring cylinder for table rotating with multi angle and the method of measuring cylinder for table not rotating with single angle are compared. At last, the optical probe method to measure the axial line of standard cylinder without the rotary table rotating is used. Then the measuring data can be compensated to improve the accuracy of measurement.





2019, 38(5): 754-760.
doi: 10.13433/j.cnki.1003-8728.20180225
Abstract:
In order to improve the step-length accuracy of the non-uniform rational B-spline (NURBS) curve interpolation, a dual-NURBS curve interpolation algorithm based on parametric iteration is presented. The interpolation of a tool-tip curve is carried out based on the local character of NURBS; the approximate linear relationship between the step-length and the parameter increment is used to obtain the interpolation parameters corresponding to the precise step-length. The interpolation parameters of the tool-axis vector curve are calculated according to the synchronous relationship between the dual-NURBS curves, thus interpolating the tool position. The experimental results show that the step-length accuracy obtained with this method is better than the Taylor expansion interpolation method and that it can ensure the consistency between the tool-axis vector and the normal direction of work-piece surface, being beneficial for obtaining a smoother machining surface.
In order to improve the step-length accuracy of the non-uniform rational B-spline (NURBS) curve interpolation, a dual-NURBS curve interpolation algorithm based on parametric iteration is presented. The interpolation of a tool-tip curve is carried out based on the local character of NURBS; the approximate linear relationship between the step-length and the parameter increment is used to obtain the interpolation parameters corresponding to the precise step-length. The interpolation parameters of the tool-axis vector curve are calculated according to the synchronous relationship between the dual-NURBS curves, thus interpolating the tool position. The experimental results show that the step-length accuracy obtained with this method is better than the Taylor expansion interpolation method and that it can ensure the consistency between the tool-axis vector and the normal direction of work-piece surface, being beneficial for obtaining a smoother machining surface.












2019, 38(5): 761-766.
doi: 10.13433/j.cnki.1003-8728.20180210
Abstract:
To improve the prediction accuracy and robustness of the grey model with first order and one variable (GM(1, 1)), an improved GM (1, 1) model is proposed. The prediction formula of the GM(1, 1) model is rededuced with the background value optimization and parameter estimation, and the prediction values are modified two times by introducing the residual modification coefficients and the weighted Markov processes to improve the prediction accuracy. The prediction results of the plunger bushing internal honing size show that the model has the highest prediction accuracy under the original data fluctuation, it can cover the shortages of the other GM (1, 1) models and predict the honing size.
To improve the prediction accuracy and robustness of the grey model with first order and one variable (GM(1, 1)), an improved GM (1, 1) model is proposed. The prediction formula of the GM(1, 1) model is rededuced with the background value optimization and parameter estimation, and the prediction values are modified two times by introducing the residual modification coefficients and the weighted Markov processes to improve the prediction accuracy. The prediction results of the plunger bushing internal honing size show that the model has the highest prediction accuracy under the original data fluctuation, it can cover the shortages of the other GM (1, 1) models and predict the honing size.

2019, 38(5): 767-772.
doi: 10.13433/j.cnki.1003-8728.20180232
Abstract:
Aiming at the measurement of the wall thickness of thin-walled slender shaft parts in aero-engine, a fast and high-precision measurement method of dual probe is proposed. A small non-contact optical probe in the present method is used to measure the inner wall of a slender shaft with a large length diameter ratio carbon fiber pole, and the contact type head is installed in the gantry structure to measure the outer wall of the slender shaft at the same time, and the high precision air floating platform is used as the worktable to measure the wall thickness of the slender shaft parts. The measurement equipment is developed by using the present method, and the mechanical, electronic control and software design are introduced in detail. Through the third party detection, the device can measure the thickness of the slender shaft with a length of 1 500 mm and an inner hole diameter of 14 mm, and the effectiveness of the method is verified.
Aiming at the measurement of the wall thickness of thin-walled slender shaft parts in aero-engine, a fast and high-precision measurement method of dual probe is proposed. A small non-contact optical probe in the present method is used to measure the inner wall of a slender shaft with a large length diameter ratio carbon fiber pole, and the contact type head is installed in the gantry structure to measure the outer wall of the slender shaft at the same time, and the high precision air floating platform is used as the worktable to measure the wall thickness of the slender shaft parts. The measurement equipment is developed by using the present method, and the mechanical, electronic control and software design are introduced in detail. Through the third party detection, the device can measure the thickness of the slender shaft with a length of 1 500 mm and an inner hole diameter of 14 mm, and the effectiveness of the method is verified.










2019, 38(5): 773-778.
doi: 10.13433/j.cnki.1003-8728.20180234
Abstract:
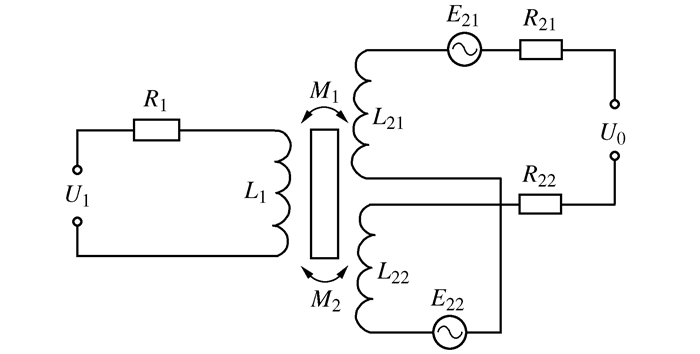
A magnetic field compensation method is proposed to improve the linearity difference and low sensitivity of the linear variable differential transformer sensor (LVDT) due to the uneven distribution of the internal induced magnetic field. Adding two magnetic flux rings about the primary coil symmetry at the distal end of the LVDT secondary coil, and designing the end of the movable iron core into a form with a certain taper, the magnetic flux ring and the iron core are soft magnetic materials. The model of improved LVDT is established in Maxwell using finite element method, modularized and imported into Simplorer. The external excitation circuit is connected in Simplorer for joint computer simulation of transient magnetic field. The transient analysis results show that the linearity and sensitivity of LVDT are significantly improved by magnetic field compensation, the linearity is improved from 1.79% to 0.5%, and the sensitivity is improved by 17.9 mV/mm. Finally, the experimental platform was built to verify the feasibility of the scheme.
A magnetic field compensation method is proposed to improve the linearity difference and low sensitivity of the linear variable differential transformer sensor (LVDT) due to the uneven distribution of the internal induced magnetic field. Adding two magnetic flux rings about the primary coil symmetry at the distal end of the LVDT secondary coil, and designing the end of the movable iron core into a form with a certain taper, the magnetic flux ring and the iron core are soft magnetic materials. The model of improved LVDT is established in Maxwell using finite element method, modularized and imported into Simplorer. The external excitation circuit is connected in Simplorer for joint computer simulation of transient magnetic field. The transient analysis results show that the linearity and sensitivity of LVDT are significantly improved by magnetic field compensation, the linearity is improved from 1.79% to 0.5%, and the sensitivity is improved by 17.9 mV/mm. Finally, the experimental platform was built to verify the feasibility of the scheme.










2019, 38(5): 779-782.
doi: 10.13433/j.cnki.1003-8728.20180242
Abstract:
In order to improve the flexibility and intelligence level of the logistics robot, the integrated application of omnidirectional mobile platform, material grabbing robot and binocular vision recognition technology is developed in this paper. The structure and mathematical models of the robot are analyzed, and the mechanism design of the manipulator is completed. By combining the computer vision recognition algorithm, a specific detection method is selected to complete the detection of the corner, edge and contour of the object and the image processing of the object is realized. Through the binocular camera imaging model, the transformation between coordinate systems can be realized to achieve the goal of locating objects. Finally, the design of the physical prototype is completed, and the practical operation is verified by experiments. The manufacturing and experimental verification of the physical prototype are carried out. The experimental results show that the robot system can effectively identify, grab and transport items.
In order to improve the flexibility and intelligence level of the logistics robot, the integrated application of omnidirectional mobile platform, material grabbing robot and binocular vision recognition technology is developed in this paper. The structure and mathematical models of the robot are analyzed, and the mechanism design of the manipulator is completed. By combining the computer vision recognition algorithm, a specific detection method is selected to complete the detection of the corner, edge and contour of the object and the image processing of the object is realized. Through the binocular camera imaging model, the transformation between coordinate systems can be realized to achieve the goal of locating objects. Finally, the design of the physical prototype is completed, and the practical operation is verified by experiments. The manufacturing and experimental verification of the physical prototype are carried out. The experimental results show that the robot system can effectively identify, grab and transport items.









2019, 38(5): 783-788.
doi: 10.13433/j.cnki.1003-8728.20180316
Abstract:
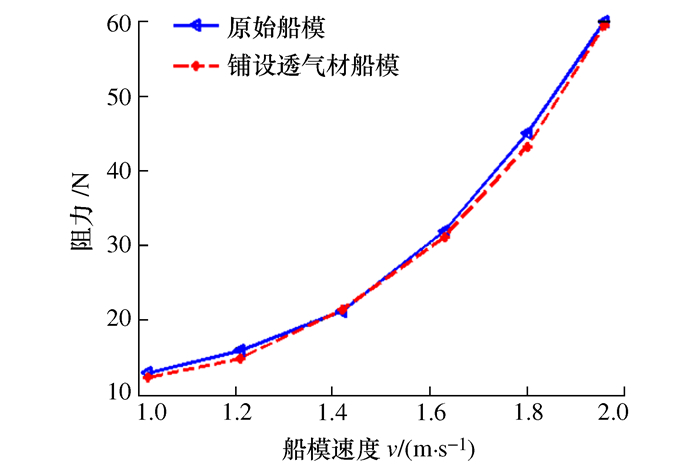
The flexible alumina porous permeable materials were installed at the bottom, side and near the bow of the ship model; the drag reduction performance of micro-bubbles and its drag reduction effect was tested and analyzed. The results show that:the maximum drag reduction effect is 11.6% when the bottom jet is located near the bulbous bow, the drag reduction effect is poor when the jet position is near the bulbous bow; only when the jet flow rate is 10 L/min, the resistance of the ship model at some test points is less than that of the ship without jet. When the jet is located at the side of the ship, the boundary layer density of the flow field changes greatly, and the fluctuation of ship speed and jet flow rate fluctuates greatly. When the ship model speed is 1.80 m/s, the bottom and side air flow rate is 20 L/min, and the bulbous bow air flow rate is 10 L/min, the micro-bubble drag reduction effect can reach 13.9% with the combination of porous permeable material bottom and ship side and bulbous bow, and the drag reduction effect is very obvious, which verifies the feasibility of applying porous permeable material to the ship model micro-bubble drag reduction.
The flexible alumina porous permeable materials were installed at the bottom, side and near the bow of the ship model; the drag reduction performance of micro-bubbles and its drag reduction effect was tested and analyzed. The results show that:the maximum drag reduction effect is 11.6% when the bottom jet is located near the bulbous bow, the drag reduction effect is poor when the jet position is near the bulbous bow; only when the jet flow rate is 10 L/min, the resistance of the ship model at some test points is less than that of the ship without jet. When the jet is located at the side of the ship, the boundary layer density of the flow field changes greatly, and the fluctuation of ship speed and jet flow rate fluctuates greatly. When the ship model speed is 1.80 m/s, the bottom and side air flow rate is 20 L/min, and the bulbous bow air flow rate is 10 L/min, the micro-bubble drag reduction effect can reach 13.9% with the combination of porous permeable material bottom and ship side and bulbous bow, and the drag reduction effect is very obvious, which verifies the feasibility of applying porous permeable material to the ship model micro-bubble drag reduction.








2019, 38(5): 789-795.
doi: 10.13433/j.cnki.1003-8728.20180205
Abstract:
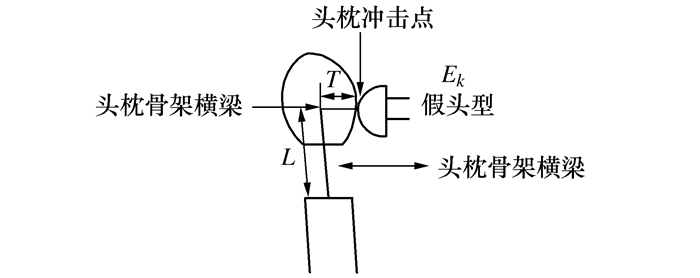
Two national mandatory regulatory test items about seat headrest are investigated in detail. For the energy dissipation test, main factors which influent test results are listed, and the influence mechanism of each factor is analyzed. For the static strength test, test curves are obtained and analyzed; the test process is divided into three typical phases, the formation process of each phase and main factors which influent test results are demonstrated in detail. Several typical test curves are listed based on a great quantity of tests, the formation causes of the typical test curves are analyzed. The analysis conclusions above can improve structural desgin of seat and seat headrest, also can provide valuable reference for engineers in design phase of product and test result analysis.
Two national mandatory regulatory test items about seat headrest are investigated in detail. For the energy dissipation test, main factors which influent test results are listed, and the influence mechanism of each factor is analyzed. For the static strength test, test curves are obtained and analyzed; the test process is divided into three typical phases, the formation process of each phase and main factors which influent test results are demonstrated in detail. Several typical test curves are listed based on a great quantity of tests, the formation causes of the typical test curves are analyzed. The analysis conclusions above can improve structural desgin of seat and seat headrest, also can provide valuable reference for engineers in design phase of product and test result analysis.













2019, 38(5): 796-802.
doi: 10.13433/j.cnki.1003-8728.20180241
Abstract:
The research on the strength of composite rivet lap structure under the temperature change is of great significance to the application of composite materials in aviation industry. In order to study the influence of the temperature change on the strength of the rivet overlapping structure, the ABAQUS/Explicit solver is selected to simulate the thermal mechanical coupling process. By writing the VUMAT subprogram, the constitutive model is modified. The effect of the temperature on the basic properties of the composite is taken into account, and the mixed failure criterion and the method of parameter degradation after the failure of the material are added. Under the temperatures of 25℃ and 105℃, the compression simulation of the composite plate with open holes and the tensile simulation of the composite lap structures are carried out. The results show that the increase in temperature will reduce the stiffness and strength of composite plate under the compression load and the stiffness and strength of composite lap structures under the tensile load.
The research on the strength of composite rivet lap structure under the temperature change is of great significance to the application of composite materials in aviation industry. In order to study the influence of the temperature change on the strength of the rivet overlapping structure, the ABAQUS/Explicit solver is selected to simulate the thermal mechanical coupling process. By writing the VUMAT subprogram, the constitutive model is modified. The effect of the temperature on the basic properties of the composite is taken into account, and the mixed failure criterion and the method of parameter degradation after the failure of the material are added. Under the temperatures of 25℃ and 105℃, the compression simulation of the composite plate with open holes and the tensile simulation of the composite lap structures are carried out. The results show that the increase in temperature will reduce the stiffness and strength of composite plate under the compression load and the stiffness and strength of composite lap structures under the tensile load.









2019, 38(5): 803-808.
doi: 10.13433/j.cnki.1003-8728.20190065
Abstract:
The bullet impact damage of Kevlar-carbon/epoxy hybrid laminates and carbon/epoxy composite materials were studied. The steel projectiles(weight 8 g) were propelled with gas gun, and shoot from different side of hybrid laminates and non-hybrid laminates at different speeds(276~366 m/s). The results showed that the damage range could reduce under bullet impact, while carbon fiber laminates was covered with Kevlar layers; but Kevlar layers were avoid to be covered bullet's exiting surface, in order to reduce the delamination damage in hybrid interface.
The bullet impact damage of Kevlar-carbon/epoxy hybrid laminates and carbon/epoxy composite materials were studied. The steel projectiles(weight 8 g) were propelled with gas gun, and shoot from different side of hybrid laminates and non-hybrid laminates at different speeds(276~366 m/s). The results showed that the damage range could reduce under bullet impact, while carbon fiber laminates was covered with Kevlar layers; but Kevlar layers were avoid to be covered bullet's exiting surface, in order to reduce the delamination damage in hybrid interface.






2019, 38(5): 809-815.
doi: 10.13433/j.cnki.1003-8728.20180223
Abstract:
The axisymmetric vector nozzle was taken as the research object, and its dynamic equation was established. Firstly, the structure of axisymmetric vector nozzle was simplified to an equivalent 3-PRS structure model, and the kinematics equation of the nozzle was established with the equivalent 3-PRS structure model. Then, the aerodynamic force was settled to be equivalent to the virtual mass of the dynamic platform, and the dynamic model of the nozzle was deduced by Lagrange method, and meanwhile its dynamic features were analyzed. The accuracy of the model was verified by comparing the two simulation results in MATLAB and ADAMS. The results showed that the attitude of nozzle took great influence on driving force. At the same time, the change rule of driving force can be obtained under different attitudes. This study provides effective help for further optimal design and control of nozzles.
The axisymmetric vector nozzle was taken as the research object, and its dynamic equation was established. Firstly, the structure of axisymmetric vector nozzle was simplified to an equivalent 3-PRS structure model, and the kinematics equation of the nozzle was established with the equivalent 3-PRS structure model. Then, the aerodynamic force was settled to be equivalent to the virtual mass of the dynamic platform, and the dynamic model of the nozzle was deduced by Lagrange method, and meanwhile its dynamic features were analyzed. The accuracy of the model was verified by comparing the two simulation results in MATLAB and ADAMS. The results showed that the attitude of nozzle took great influence on driving force. At the same time, the change rule of driving force can be obtained under different attitudes. This study provides effective help for further optimal design and control of nozzles.










2019, 38(5): 816-820.
doi: 10.13433/j.cnki.1003-8728.20180220
Abstract:
Taking hollowed pre-notched plate with multiple-site damages (MSD) as study object, the influence of crack initiation positions and angles on the stress intensity factor was investigated using numerical analysis method in the paper. And the differences of the initial propagation rate and propagation life between the collinear multi-crack and non-collinear multi-mixed crack were also performed. The results indicated that, for the non-collinear mixed-crack, the initial propagation rate of crack was larger, while its propagation life was shortened by about two point five percent; moreover the equivalent stress intensity factor initially increased, followed by decreases as the crack angles increased. The overall crack propagation rate reached the maximum as the crack angle 15°. In addition, the relative position and relative orientation of the cracks between adjacent holes influenced their propagation paths, which would effect on the crack propagation life.
Taking hollowed pre-notched plate with multiple-site damages (MSD) as study object, the influence of crack initiation positions and angles on the stress intensity factor was investigated using numerical analysis method in the paper. And the differences of the initial propagation rate and propagation life between the collinear multi-crack and non-collinear multi-mixed crack were also performed. The results indicated that, for the non-collinear mixed-crack, the initial propagation rate of crack was larger, while its propagation life was shortened by about two point five percent; moreover the equivalent stress intensity factor initially increased, followed by decreases as the crack angles increased. The overall crack propagation rate reached the maximum as the crack angle 15°. In addition, the relative position and relative orientation of the cracks between adjacent holes influenced their propagation paths, which would effect on the crack propagation life.







