


 Author Center
Author Center Editor Work
Editor Work Peer Review
Peer Review Editorial Entry
Editorial Entry
 Email Alert
Email Alert RSS
RSS2018 Vol. 37, No. 12
Display Method:
2018, 37(12): 1805-1810.
doi: 10.13433/j.cnki.1003-8728.20180079
 PDF 1059KB
PDF 1059KB
Abstract:
Because a free-floating 6-DOF nonholonomic redundant space manipulator cannot solve the smoothness and stability problem in path planning, an improved path planning strategy for cuckoo search algorithm is designed. On the basis of the general model of the space manipulator, this paper established the equation of motion according to the base attitude, angular velocity and angular acceleration constraints of a mechanical arm joint. It built the path planning model of the space manipulator to optimize the cuckoo search algorithm, thus achieving the purpose of path planning. The simulation results show that the strategy overcomes the constraints of the manipulator, makes the final state of the space joint reach the desired state and improves the smoothness of the path of the joint and that it can better overcome the interference of the manipulator's motion on the base attitude and enhance the manipulator's motion stability.
Because a free-floating 6-DOF nonholonomic redundant space manipulator cannot solve the smoothness and stability problem in path planning, an improved path planning strategy for cuckoo search algorithm is designed. On the basis of the general model of the space manipulator, this paper established the equation of motion according to the base attitude, angular velocity and angular acceleration constraints of a mechanical arm joint. It built the path planning model of the space manipulator to optimize the cuckoo search algorithm, thus achieving the purpose of path planning. The simulation results show that the strategy overcomes the constraints of the manipulator, makes the final state of the space joint reach the desired state and improves the smoothness of the path of the joint and that it can better overcome the interference of the manipulator's motion on the base attitude and enhance the manipulator's motion stability.









2018, 37(12): 1811-1816.
doi: 10.13433/j.cnki.1003-8728.20180230
Abstract:
The traditional robot manipulator flexibility optimization method ignores the acquisition of the singular value of the Jacobi matrix, which reduces the efficiency of the manipulator's flexibility and the accuracy of the explosion. The flexibility optimization method of five-DOF manipulator is put forward. First, the dynamic model of the manipulator is constructed, and the Lagrange dynamic equation and relevant parameters are obtained, and the probability coefficient and operability of the attitude are described. Based on the working ball of five degrees of freedom manipulator, the attitude probability coefficient of the manipulator is analyzed. According to the operability of the manipulator, the bizarre value of Jacobian matrix is constructed, the flexibility of the manipulator is optimized in the working space, and the target function is solved by the genetic algorithm. The experimental results show that the proposed method has better performance and can effectively improve the flexibility of the manipulator.
The traditional robot manipulator flexibility optimization method ignores the acquisition of the singular value of the Jacobi matrix, which reduces the efficiency of the manipulator's flexibility and the accuracy of the explosion. The flexibility optimization method of five-DOF manipulator is put forward. First, the dynamic model of the manipulator is constructed, and the Lagrange dynamic equation and relevant parameters are obtained, and the probability coefficient and operability of the attitude are described. Based on the working ball of five degrees of freedom manipulator, the attitude probability coefficient of the manipulator is analyzed. According to the operability of the manipulator, the bizarre value of Jacobian matrix is constructed, the flexibility of the manipulator is optimized in the working space, and the target function is solved by the genetic algorithm. The experimental results show that the proposed method has better performance and can effectively improve the flexibility of the manipulator.






2018, 37(12): 1817-1822.
doi: 10.13433/j.cnki.1003-8728.20180087
Abstract:
The effect of the velocity of moving membrane on the nonlinear forced vibration is investigated in this paper. Large deflection vibration equation of an axially moving membrane is deduced by using the Von Karman thin plate theory. Galerkin method is applied to discretize vibration differential equations of the membrane, and then the state equation of the system is obtained. The state equation of the system is numerically solved by the fourth order Runge-Kutta method, and the relationship between the nonlinear vibration characteristics and the velocity of the membrane is analyzed by using the bifurcation diagram. The chaotic region and stable working region of the moving membrane are obtained. The periodic motion and chaos motion of the system are analyzed by time histories, phase-plane portraits, Poincare maps and power spectrum.
The effect of the velocity of moving membrane on the nonlinear forced vibration is investigated in this paper. Large deflection vibration equation of an axially moving membrane is deduced by using the Von Karman thin plate theory. Galerkin method is applied to discretize vibration differential equations of the membrane, and then the state equation of the system is obtained. The state equation of the system is numerically solved by the fourth order Runge-Kutta method, and the relationship between the nonlinear vibration characteristics and the velocity of the membrane is analyzed by using the bifurcation diagram. The chaotic region and stable working region of the moving membrane are obtained. The periodic motion and chaos motion of the system are analyzed by time histories, phase-plane portraits, Poincare maps and power spectrum.







2018, 37(12): 1823-1827.
doi: 10.13433/j.cnki.1003-8728.20180137
Abstract:
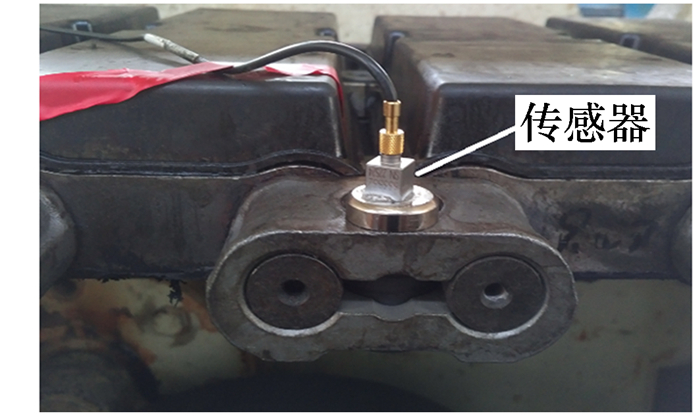
Different from the traditional metal hinge track, a new structure with rubber bushing in tubular has been used in modern track, which means the dynamic property of modern track is also different. A dynamic model of track with rubber bushing in tubular was established based on the transverse vibration theory of beam in consideration of the new structure in modern track. The natural frequency formula that contains flexural rigidity was worked out on condition that treated the track as a beam with tension. A vibration experiment of a track is carried out, and according to the experiment results, the track model based on beam transverse vibration is more accurate in describing the track vibration property than traditional models based on string with transverse vibration.
Different from the traditional metal hinge track, a new structure with rubber bushing in tubular has been used in modern track, which means the dynamic property of modern track is also different. A dynamic model of track with rubber bushing in tubular was established based on the transverse vibration theory of beam in consideration of the new structure in modern track. The natural frequency formula that contains flexural rigidity was worked out on condition that treated the track as a beam with tension. A vibration experiment of a track is carried out, and according to the experiment results, the track model based on beam transverse vibration is more accurate in describing the track vibration property than traditional models based on string with transverse vibration.







2018, 37(12): 1828-1833.
doi: 10.13433/j.cnki.1003-8728.20180096
Abstract:
Considering the importance of a non-pressure-bearing structure to UUV, its multi-objective topology is optimized by using the compromise programming method so as to establish a comprehensive objective function. The grey-analytic hierarchy process is used to determine the weight factors of sub-objectives. Taking the non-pressure-bearing structure of UUV for example, firstly, the weight factors of sub-objectives (flexibility of typical operating conditions and average values of natural frequency of the first three orders) were obtained with the grey-analytic hierarchy process according to optimization results. Then, the multi-objective topology optimization was designed with the compromise programming method. The optimization results show that the method presented in this paper is feasible and effective for the initial design of the UUV non-pressure-bearing structure. At the same time, the grey-analytic hierarchy process is more efficient and more reasonable than analytic hierarchy process and grey relational analysis.
Considering the importance of a non-pressure-bearing structure to UUV, its multi-objective topology is optimized by using the compromise programming method so as to establish a comprehensive objective function. The grey-analytic hierarchy process is used to determine the weight factors of sub-objectives. Taking the non-pressure-bearing structure of UUV for example, firstly, the weight factors of sub-objectives (flexibility of typical operating conditions and average values of natural frequency of the first three orders) were obtained with the grey-analytic hierarchy process according to optimization results. Then, the multi-objective topology optimization was designed with the compromise programming method. The optimization results show that the method presented in this paper is feasible and effective for the initial design of the UUV non-pressure-bearing structure. At the same time, the grey-analytic hierarchy process is more efficient and more reasonable than analytic hierarchy process and grey relational analysis.











2018, 37(12): 1834-1840.
doi: 10.13433/j.cnki.1003-8728.20180141
Abstract:
In order to improve the control precision of the trajectory tracking of a two-wheel driving wheeled mobile robot, a global asymptotic stability control method is proposed based on its kinematics and dynamics equations model. Firstly, the kinematics controller of the wheeled mobile robot is built based on back-stepping. Secondly, the dynamic controller of the wheeled mobile robot is established with the sliding mode control method. Then, the control law parameters of fuzzy control setting is added to weaken the chattering. Finally, the adaptive control law is established for the unknown disturbance of the wheeled mobile robot, and its stability is proved. The simulation is carried out to track its straight line, circle and sine-like wave, thus verifying the effectiveness of the control method.
In order to improve the control precision of the trajectory tracking of a two-wheel driving wheeled mobile robot, a global asymptotic stability control method is proposed based on its kinematics and dynamics equations model. Firstly, the kinematics controller of the wheeled mobile robot is built based on back-stepping. Secondly, the dynamic controller of the wheeled mobile robot is established with the sliding mode control method. Then, the control law parameters of fuzzy control setting is added to weaken the chattering. Finally, the adaptive control law is established for the unknown disturbance of the wheeled mobile robot, and its stability is proved. The simulation is carried out to track its straight line, circle and sine-like wave, thus verifying the effectiveness of the control method.






2018, 37(12): 1841-1846.
doi: 10.13433/j.cnki.1003-8728.20180094
Abstract:
Based on the dynamic response characteristics of the infinite periodic structure in frequency domain and the superposition principle, the frequency response function for the vertical vibration of any point on track structure under the moving harmonic load is derived consequently. Then, the influences of different moving load speeds on the vibration response are numerically analyzed under single moving load or the moving loads of 6 B drum type train groups. The research results indicate that the response peaks of the rail occur in the vicinity of the excitation frequency. The increase of moving speed will lead to the improvement of the peak bandwidth of the dynamic response in the resonance region, but the displacement response will decrease within a narrow frequency band in the vicinity of the excitation frequency. The dynamic response will significantly increase with increasing load moving speed in the non-resonance region. Comparing with the case of a single moving harmonic load, the peak bandwidth of the dynamic response is broader under a series of moving harmonic loads. With the increase of moving speed, the peak bandwidth of the dynamic response increases slightly.
Based on the dynamic response characteristics of the infinite periodic structure in frequency domain and the superposition principle, the frequency response function for the vertical vibration of any point on track structure under the moving harmonic load is derived consequently. Then, the influences of different moving load speeds on the vibration response are numerically analyzed under single moving load or the moving loads of 6 B drum type train groups. The research results indicate that the response peaks of the rail occur in the vicinity of the excitation frequency. The increase of moving speed will lead to the improvement of the peak bandwidth of the dynamic response in the resonance region, but the displacement response will decrease within a narrow frequency band in the vicinity of the excitation frequency. The dynamic response will significantly increase with increasing load moving speed in the non-resonance region. Comparing with the case of a single moving harmonic load, the peak bandwidth of the dynamic response is broader under a series of moving harmonic loads. With the increase of moving speed, the peak bandwidth of the dynamic response increases slightly.








2018, 37(12): 1847-1853.
doi: 10.13433/j.cnki.1003-8728.20180135
Abstract:
The moment of inertia determines the objectivity and effectiveness of the dynamic test process. The electrical emulation has the advantages of the tunability and controllability than emulation by the mechanical flywheel groups, and will be the most promising method for the dynamic test in the future. In order to illustrate the research conclusions of the mechanical inertia electrical emulation and promote technological progress, the principle of the electrical emulation was illustrated, and then technology characteristics of the application in the field of vehicle transmission system test platform and the dynamic behavior emulation of wind turbine were analyzed. The researched control methods were summarized as angular acceleration control method, torque control method and speed tracking control method according to the signal take part in the control method. The characteristics of these control methods and the existing problems were analyzed. Furthermore, the key problems being considered in the future researches were proposed from the engineering application aspect. They are the nonlinear friction and elastic properties in actual system, the real-time detection for signal take part in the control method as well as the system time delay effect and compensation method.
The moment of inertia determines the objectivity and effectiveness of the dynamic test process. The electrical emulation has the advantages of the tunability and controllability than emulation by the mechanical flywheel groups, and will be the most promising method for the dynamic test in the future. In order to illustrate the research conclusions of the mechanical inertia electrical emulation and promote technological progress, the principle of the electrical emulation was illustrated, and then technology characteristics of the application in the field of vehicle transmission system test platform and the dynamic behavior emulation of wind turbine were analyzed. The researched control methods were summarized as angular acceleration control method, torque control method and speed tracking control method according to the signal take part in the control method. The characteristics of these control methods and the existing problems were analyzed. Furthermore, the key problems being considered in the future researches were proposed from the engineering application aspect. They are the nonlinear friction and elastic properties in actual system, the real-time detection for signal take part in the control method as well as the system time delay effect and compensation method.




2018, 37(12): 1854-1861.
doi: 10.13433/j.cnki.1003-8728.20180132
Abstract:
A cylinder-flat fretting wear model is established based on ABAQUS software. The critical function of the two sliding conditions was obtained by analyzing the contact stress and the relative slip distance of the contact area under different loading conditions. The UMESHMOTION subroutine is written via energy model and FORTRAN language to obtain the dynamic updating of the wear surface nodes and the dynamic wear model is established. After the simulation analysis of the wear depth and wear volume under different conditions, the results demonstrated that the wear width, wear depth and wear volume increase by the number of cycles increase, and the wear volume in the partially slipping condition is much smaller than the wear volume in the gross slip condition. It is also found that the wear width, wear depth and wear volume increase by raising the displacement amplitude, but the wear volume in the partial slip condition is small and increases slowly, the gross slip condition follows the opposite trend when the number of cycles and the normal load are constant. Moreover, when the number of cycles and the displacement amplitude are fixed, the wear depth and the wear volume firstly increase and then decrease as the normal force under gross slip condition increases. The normal load and displacement amplitude that make the wear depth and wear volume to reach the maximum value are defined as the dangerous loading condition. Therefore, the variation rule of the dangerous loading condition at different displacement amplitude is revealed, which provides the theoretical basis for avoiding the occurrence of the dangerous loading condition.
A cylinder-flat fretting wear model is established based on ABAQUS software. The critical function of the two sliding conditions was obtained by analyzing the contact stress and the relative slip distance of the contact area under different loading conditions. The UMESHMOTION subroutine is written via energy model and FORTRAN language to obtain the dynamic updating of the wear surface nodes and the dynamic wear model is established. After the simulation analysis of the wear depth and wear volume under different conditions, the results demonstrated that the wear width, wear depth and wear volume increase by the number of cycles increase, and the wear volume in the partially slipping condition is much smaller than the wear volume in the gross slip condition. It is also found that the wear width, wear depth and wear volume increase by raising the displacement amplitude, but the wear volume in the partial slip condition is small and increases slowly, the gross slip condition follows the opposite trend when the number of cycles and the normal load are constant. Moreover, when the number of cycles and the displacement amplitude are fixed, the wear depth and the wear volume firstly increase and then decrease as the normal force under gross slip condition increases. The normal load and displacement amplitude that make the wear depth and wear volume to reach the maximum value are defined as the dangerous loading condition. Therefore, the variation rule of the dangerous loading condition at different displacement amplitude is revealed, which provides the theoretical basis for avoiding the occurrence of the dangerous loading condition.















2018, 37(12): 1862-1869.
doi: 10.13433/j.cnki.1003-8728.20180095
Abstract:
A mechanism for spatial translational parallel robotic, which is composed of a fixed base connected to a moving platform by three identical CPR-type kinematic chains, is put forward. Based on the screw theory, the output motion characteristics of the moving platform are analyzed. Selection of the actuated inputs and singularity of the mechanism are discussed by means of the overall Jacobian matrix. According to the different input forms, the kinematic vector equations of the mechanism are established. Especially, when the linear displacements of three cylindrical joints are selected as the actuated inputs, there exists one-to-one linear mapping control relationship between the outputs of the moving platform and the inputs of the actuated joints. Meanwhile, it is derived that its Jacobian is a unit matrix, which indicates that the mechanism has the fully-isotropic performance throughout its whole workspace. The kinematic simulation is also carried out by using software MATLAB and ADAMS. Finally, workspace of the mechanism is discussed.
A mechanism for spatial translational parallel robotic, which is composed of a fixed base connected to a moving platform by three identical CPR-type kinematic chains, is put forward. Based on the screw theory, the output motion characteristics of the moving platform are analyzed. Selection of the actuated inputs and singularity of the mechanism are discussed by means of the overall Jacobian matrix. According to the different input forms, the kinematic vector equations of the mechanism are established. Especially, when the linear displacements of three cylindrical joints are selected as the actuated inputs, there exists one-to-one linear mapping control relationship between the outputs of the moving platform and the inputs of the actuated joints. Meanwhile, it is derived that its Jacobian is a unit matrix, which indicates that the mechanism has the fully-isotropic performance throughout its whole workspace. The kinematic simulation is also carried out by using software MATLAB and ADAMS. Finally, workspace of the mechanism is discussed.







2018, 37(12): 1870-1874.
doi: 10.13433/j.cnki.1003-8728.20180081
Abstract:
A trajectory optimization algorithm based on fitness function is proposed to overcome the lack of motion stability of the joint space of a surface modified redundant robot during the optimization of its end trajectory. We select a series of points for surface modification for fitting a straight line with a parabola in the joint space of the robot, and then we select the fitting curve of the points on the trajectory obtained by forward kinematics and then compare it with the modification of the surface of the desired trajectory. A fitness function is established with the error between actual trajectory and desired trajectory; the optimal joint inverse solution for parameters in trajectory planning is found by using genetic algorithm so as to ensure the smooth motion of the joint space. Finally, the rationality of the algorithm is verified by simulating the inlet of an aircraft.
A trajectory optimization algorithm based on fitness function is proposed to overcome the lack of motion stability of the joint space of a surface modified redundant robot during the optimization of its end trajectory. We select a series of points for surface modification for fitting a straight line with a parabola in the joint space of the robot, and then we select the fitting curve of the points on the trajectory obtained by forward kinematics and then compare it with the modification of the surface of the desired trajectory. A fitness function is established with the error between actual trajectory and desired trajectory; the optimal joint inverse solution for parameters in trajectory planning is found by using genetic algorithm so as to ensure the smooth motion of the joint space. Finally, the rationality of the algorithm is verified by simulating the inlet of an aircraft.












Comparative Study on Analytical Models and Experimental Results for Normal Contact of Rough Surfaces
2018, 37(12): 1875-1882.
doi: 10.13433/j.cnki.1003-8728.20180091
Abstract:
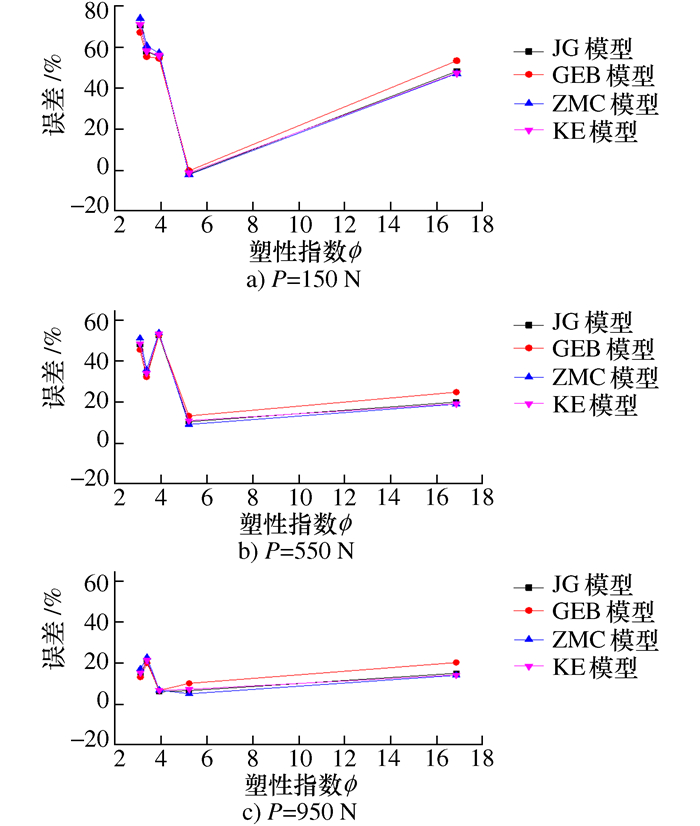
The nonlinear analysis about rough surface contact behaviors is an important problem of engineering. Current theoretical methods, which often based on statistic method and experimental researches of contact interfaces, are basically independent of each other. Hence, a comparative study between classically analytical models and typically experiments for normal contact interfaces is presented. Analytical models including GW model, CEB model, ZMC model, KE model and JG model are considered. Experimental techniques including quasi-static experiment, contact resonance based method and ultrasound measurement method are reviewed. The comparison results show that higher normal load leads to higher percentage of plastic deformation. Analytical models considering asperities' plastic deformation are more consistent with the experimental results. Under the same normal load, the deformation differences predicted by above different models increase with plasticity index. There exists a range of plasticity index in which the distinction between theoretical results and experimental results is the lowest. The ultrasound experimental results of contact stiffness are greatly affected by the ultrasonic model at interface. The modified ultrasonic model can effectively improve measurement accuracy.
The nonlinear analysis about rough surface contact behaviors is an important problem of engineering. Current theoretical methods, which often based on statistic method and experimental researches of contact interfaces, are basically independent of each other. Hence, a comparative study between classically analytical models and typically experiments for normal contact interfaces is presented. Analytical models including GW model, CEB model, ZMC model, KE model and JG model are considered. Experimental techniques including quasi-static experiment, contact resonance based method and ultrasound measurement method are reviewed. The comparison results show that higher normal load leads to higher percentage of plastic deformation. Analytical models considering asperities' plastic deformation are more consistent with the experimental results. Under the same normal load, the deformation differences predicted by above different models increase with plasticity index. There exists a range of plasticity index in which the distinction between theoretical results and experimental results is the lowest. The ultrasound experimental results of contact stiffness are greatly affected by the ultrasonic model at interface. The modified ultrasonic model can effectively improve measurement accuracy.











2018, 37(12): 1883-1889.
doi: 10.13433/j.cnki.1003-8728.20180090
Abstract:
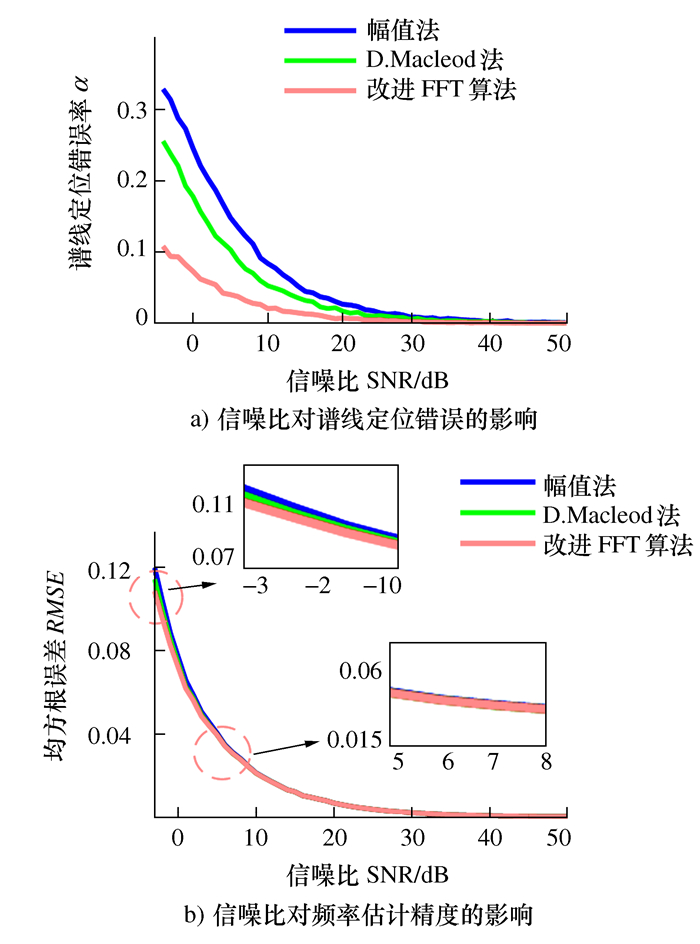
The effect of wrong location of spectral bins caused by noise on frequency estimation was studied in the energy centrobaric correction method. In order to improve accuracy of frequency estimation, an improved FFT correction algorithm was proposed to decrease the ratio of wrong choices of spectral bins, based on the theory of the energy centrobaric correction method and existing methods for selecting spectral bins. The improved method, based on the D. Macleod method, selected the spectral bins by means of phase difference between the spectral lines, and reduced the occurrence of wrong location of spectral bins. Finally, a general formula of frequency correction was presented. The simulation results showed that the improved algorithm had a lower ratio of wrong choices of spectral bins and better anti-noise performance; And the method had a smaller root-mean-square error(RMSE) than the other methods when estimating the frequency in Gauss white noise. The application of pipeline length detection in the simulation of downhole casing further indicated that the improved method had higher frequency estimation accuracy and effectively decreased length measurement errors.
The effect of wrong location of spectral bins caused by noise on frequency estimation was studied in the energy centrobaric correction method. In order to improve accuracy of frequency estimation, an improved FFT correction algorithm was proposed to decrease the ratio of wrong choices of spectral bins, based on the theory of the energy centrobaric correction method and existing methods for selecting spectral bins. The improved method, based on the D. Macleod method, selected the spectral bins by means of phase difference between the spectral lines, and reduced the occurrence of wrong location of spectral bins. Finally, a general formula of frequency correction was presented. The simulation results showed that the improved algorithm had a lower ratio of wrong choices of spectral bins and better anti-noise performance; And the method had a smaller root-mean-square error(RMSE) than the other methods when estimating the frequency in Gauss white noise. The application of pipeline length detection in the simulation of downhole casing further indicated that the improved method had higher frequency estimation accuracy and effectively decreased length measurement errors.






2018, 37(12): 1890-1894.
doi: 10.13433/j.cnki.1003-8728.20180083
Abstract:
Slotted screen is an important equipment for mechanical sand, a new method via electrical discharge machining (EDM) combined electrochemical machining (ECM) is used to manufacture the screen. Aiming at the shortcomings of traditional water based working fluids, such as low processing efficiency, low kerosene flash point and poor safety, a new water-soluble working fluid for EDM combined machining was developed. The best basic working fluid was determined by orthogonal test, and sucrose, electrolyte and so on were added in the compound processing, and the difference between the compound processing and the oil processing was compared. The results showed that at a temperature of 30℃ the ratio of pure water, polyethylene glycol 400 and triethanolamine was of 11:11:3, and the performance of the basic working fluid with a mass fraction of 10% was the best. The best processing effect can be obtained by adding 35 g sucrose on the basis of 1g NaNO3 and 0.25gNaCl. Compared with the working fluid of oil processing, the surface roughness was reduced, the processing efficiency was reduced and the width of the seam was increased, and the cleanness and safety were improved.
Slotted screen is an important equipment for mechanical sand, a new method via electrical discharge machining (EDM) combined electrochemical machining (ECM) is used to manufacture the screen. Aiming at the shortcomings of traditional water based working fluids, such as low processing efficiency, low kerosene flash point and poor safety, a new water-soluble working fluid for EDM combined machining was developed. The best basic working fluid was determined by orthogonal test, and sucrose, electrolyte and so on were added in the compound processing, and the difference between the compound processing and the oil processing was compared. The results showed that at a temperature of 30℃ the ratio of pure water, polyethylene glycol 400 and triethanolamine was of 11:11:3, and the performance of the basic working fluid with a mass fraction of 10% was the best. The best processing effect can be obtained by adding 35 g sucrose on the basis of 1g NaNO3 and 0.25gNaCl. Compared with the working fluid of oil processing, the surface roughness was reduced, the processing efficiency was reduced and the width of the seam was increased, and the cleanness and safety were improved.


2018, 37(12): 1895-1901.
doi: 10.13433/j.cnki.1003-8728.20180089
Abstract:
Aiming at non-stationary and modulation characteristics of fault vibration signals of gear, a fault diagnosis method is proposed by using the probabilistic neural network(PNN) on the basis of the variational mode decomposition(VMD)-modulo square threshold diagnosing. Firstly, the signals was decomposed into the several intrinsic mode functions(IMF) and each one was processed with the modulo squared threshold method. Then, the kurtosis and root mean square of the signals which were reconstructed with IMFs after the modulo squared threshold method were extracted as fault feature vectors for pattern recognition. Finally, the feature vector was input PNN model to realize the fault type identification. Through gear fault tests, based on EMD-modulo square threshold, LMD-modulo square threshold and EEMD-modulo square threshold, the accuracy was up to 96.875% comparing with BPNN, in which the feasibility and effectiveness of the present method was verified.
Aiming at non-stationary and modulation characteristics of fault vibration signals of gear, a fault diagnosis method is proposed by using the probabilistic neural network(PNN) on the basis of the variational mode decomposition(VMD)-modulo square threshold diagnosing. Firstly, the signals was decomposed into the several intrinsic mode functions(IMF) and each one was processed with the modulo squared threshold method. Then, the kurtosis and root mean square of the signals which were reconstructed with IMFs after the modulo squared threshold method were extracted as fault feature vectors for pattern recognition. Finally, the feature vector was input PNN model to realize the fault type identification. Through gear fault tests, based on EMD-modulo square threshold, LMD-modulo square threshold and EEMD-modulo square threshold, the accuracy was up to 96.875% comparing with BPNN, in which the feasibility and effectiveness of the present method was verified.












2018, 37(12): 1902-1907.
doi: 10.13433/j.cnki.1003-8728.20180138
Abstract:
As an important mathematical method of shape representation, Bezier curve is widely used in CAD/CAM software. In the numerical control machining operation of complex surface, the CAD/CAM (computer-aided design, computer-aided manufacturing) system eventually uses the straight line segments instead of the curve to process a workpiece. In order to improve the efficiency and accuracy of approximation Bezier curve with tiny straight line segments, a fast approximation algorithm for N-degree Bezier curve is proposed. In this method, the Bezier curve is subdivided with an invariable proportion repeatedly to make the control polygon converge gradually to the original Bezier curve until the approximation error meets the requirement. Comparing with the existing segmentation algorithm by using MATLAB software, the results show that the fast approximation algorithm via polygon reduces greatly the approximation error and improves the segmentation efficiency. Finally, the practicality of this algorithm in engineering is verified by giving an example.
As an important mathematical method of shape representation, Bezier curve is widely used in CAD/CAM software. In the numerical control machining operation of complex surface, the CAD/CAM (computer-aided design, computer-aided manufacturing) system eventually uses the straight line segments instead of the curve to process a workpiece. In order to improve the efficiency and accuracy of approximation Bezier curve with tiny straight line segments, a fast approximation algorithm for N-degree Bezier curve is proposed. In this method, the Bezier curve is subdivided with an invariable proportion repeatedly to make the control polygon converge gradually to the original Bezier curve until the approximation error meets the requirement. Comparing with the existing segmentation algorithm by using MATLAB software, the results show that the fast approximation algorithm via polygon reduces greatly the approximation error and improves the segmentation efficiency. Finally, the practicality of this algorithm in engineering is verified by giving an example.








2018, 37(12): 1908-1913.
doi: 10.13433/j.cnki.1003-8728.20180080
Abstract:
As the key structure of the ECM machine tool, the ram has great important influence on the performance of the machine tool. In this paper, the structural characteristics and loading conditions of ram are analyzed, and the design scheme of stiffener is put forward, and the stress and deformation condition is simulated via finite element method. On the above-mentioned basis, the mathematical model for the multi constraint optimization is established so as to transform the multi-objective problem into single objective problem via evaluation function by using the topology optimization method. Adopting the minimum mass as optimization objective function and the maximum deformation as constraint condition, the structural optimization design and the sensitivity analysis of the optimized parameters is carried out. The result shows that the stiffener layout is reasonable, and meanwhile the ram structure performance is improved and the lightweight design is achieved. The ram has been used in the self-made ECM machine tool.
As the key structure of the ECM machine tool, the ram has great important influence on the performance of the machine tool. In this paper, the structural characteristics and loading conditions of ram are analyzed, and the design scheme of stiffener is put forward, and the stress and deformation condition is simulated via finite element method. On the above-mentioned basis, the mathematical model for the multi constraint optimization is established so as to transform the multi-objective problem into single objective problem via evaluation function by using the topology optimization method. Adopting the minimum mass as optimization objective function and the maximum deformation as constraint condition, the structural optimization design and the sensitivity analysis of the optimized parameters is carried out. The result shows that the stiffener layout is reasonable, and meanwhile the ram structure performance is improved and the lightweight design is achieved. The ram has been used in the self-made ECM machine tool.









2018, 37(12): 1914-1919.
doi: 10.13433/j.cnki.1003-8728.20180093
Abstract:
In order to investigate the influences of the structural parameters (such as fin spacing distance, fin thickness, hole density, hole diameters, etc.) on the heat dissipation performance of perforated fin radiator formed in the planning process, multi-physics simulation coupling turbulent fluid flow and solid heat transfer were carried out. The simulated results showed that the heat dissipation efficiency could be enhanced with the increasing of the fin spacing distance, hole density, hole diameter, and with the decreasing of the fin thickness.
In order to investigate the influences of the structural parameters (such as fin spacing distance, fin thickness, hole density, hole diameters, etc.) on the heat dissipation performance of perforated fin radiator formed in the planning process, multi-physics simulation coupling turbulent fluid flow and solid heat transfer were carried out. The simulated results showed that the heat dissipation efficiency could be enhanced with the increasing of the fin spacing distance, hole density, hole diameter, and with the decreasing of the fin thickness.










2018, 37(12): 1920-1927.
doi: 10.13433/j.cnki.1003-8728.20180229
Abstract:
A shaft-groove ball bearing system is selected to study its dynamic behavior. The dynamic simulation software ADAMS is applied to reveal the relationship between the reaction force of the bearing system and the displacement of the bearing journal center. The paper focuses on discussing the influences such as the axial force applied on the deep groove ball bearing system, the centrifugal force of a rolling ball and the radial clearance of the bearing system on the dynamic behavior of the shaft-groove ball bearing system. The calculation results show that the axial force acts as a pre-tightening force on the bearing system and changes the amplitude frequency characteristics of the shaft-bearing system. The relationship between the radial displacement of the bearing journal center and the axial force has a nonlinear decrease function relation. The centrifugal force of the rolling ball increases when its speed increases so that its stiffness decreases and the central radial displacement response peak of the bearing journal center increases. The relationship between the bearing clearance and the radial displacement response peak of the bearing journal center is approximately linear.
A shaft-groove ball bearing system is selected to study its dynamic behavior. The dynamic simulation software ADAMS is applied to reveal the relationship between the reaction force of the bearing system and the displacement of the bearing journal center. The paper focuses on discussing the influences such as the axial force applied on the deep groove ball bearing system, the centrifugal force of a rolling ball and the radial clearance of the bearing system on the dynamic behavior of the shaft-groove ball bearing system. The calculation results show that the axial force acts as a pre-tightening force on the bearing system and changes the amplitude frequency characteristics of the shaft-bearing system. The relationship between the radial displacement of the bearing journal center and the axial force has a nonlinear decrease function relation. The centrifugal force of the rolling ball increases when its speed increases so that its stiffness decreases and the central radial displacement response peak of the bearing journal center increases. The relationship between the bearing clearance and the radial displacement response peak of the bearing journal center is approximately linear.



















2018, 37(12): 1928-1935.
doi: 10.13433/j.cnki.1003-8728.20180133
Abstract:
In order to reduce the vibration and impact of motion control system during start, stop, acceleration and deceleration stages, a acceleration/deceleration control algorithm of full-types asymmetric seven-segment S-shape curve was proposed. Through accessibility analysis of the maximum acceleration, maximum deceleration and maximum speed, 17 kinds of speed curve types were planned. To guarantee system can move from the starting speed to the ending speed under constraint of given trajectory length, a reachability checking of starting speed and ending speed was presented. The ShengJin formula is used to correct starting velocity and end velocity when the given trajectory length is smaller than the minimum trajectory length required by the system moving from starting velocity to end velocity. And also, the flowchart of S-curve acceleration/deceleration control algorithm was deduced and optimized. Experiments were carried out to verify the proposed S-shape curve control algorithm on the self-designed multi-axis motion control board. The experimental results show that the algorithm can plan 17 types of velocity curves, the maximum acceleration, maximum deceleration and maximum speed can be restricted without exceeding limits, the problem of reachability check and correction of starting speed and ending speed under constraint of a given trajectory length can be solved.
In order to reduce the vibration and impact of motion control system during start, stop, acceleration and deceleration stages, a acceleration/deceleration control algorithm of full-types asymmetric seven-segment S-shape curve was proposed. Through accessibility analysis of the maximum acceleration, maximum deceleration and maximum speed, 17 kinds of speed curve types were planned. To guarantee system can move from the starting speed to the ending speed under constraint of given trajectory length, a reachability checking of starting speed and ending speed was presented. The ShengJin formula is used to correct starting velocity and end velocity when the given trajectory length is smaller than the minimum trajectory length required by the system moving from starting velocity to end velocity. And also, the flowchart of S-curve acceleration/deceleration control algorithm was deduced and optimized. Experiments were carried out to verify the proposed S-shape curve control algorithm on the self-designed multi-axis motion control board. The experimental results show that the algorithm can plan 17 types of velocity curves, the maximum acceleration, maximum deceleration and maximum speed can be restricted without exceeding limits, the problem of reachability check and correction of starting speed and ending speed under constraint of a given trajectory length can be solved.







2018, 37(12): 1936-1943.
doi: 10.13433/j.cnki.1003-8728.20180086
Abstract:
Early fault feature of rolling bearings is very weak and affected by environmental noise and the signal attenuation, the vibration signal characteristic frequency of the rolling bearing is difficult to be accurately extracted; and the background noise is very strong, which will affect the ability of the CEEMD to extract weak signal feature. Aiming at this problem, the paper put forward an integrated diagnosis method based on the complementary ensemble empirical mode decomposition (CEEMD) and maxim correlated kurtosis deconvolution (MCKD). The combination of the two methods effectively solves the problem of weak signal characteristics that cannot be submerged in background noise after CEEMD decomposition, and the completeness of the signal is maintained, and the loss of useful information is avoided. The simulation signal and experimental data prove the effectiveness and advantages of the proposed method.
Early fault feature of rolling bearings is very weak and affected by environmental noise and the signal attenuation, the vibration signal characteristic frequency of the rolling bearing is difficult to be accurately extracted; and the background noise is very strong, which will affect the ability of the CEEMD to extract weak signal feature. Aiming at this problem, the paper put forward an integrated diagnosis method based on the complementary ensemble empirical mode decomposition (CEEMD) and maxim correlated kurtosis deconvolution (MCKD). The combination of the two methods effectively solves the problem of weak signal characteristics that cannot be submerged in background noise after CEEMD decomposition, and the completeness of the signal is maintained, and the loss of useful information is avoided. The simulation signal and experimental data prove the effectiveness and advantages of the proposed method.

























2018, 37(12): 1944-1947.
doi: 10.13433/j.cnki.1003-8728.20180231
Abstract:
Precision electronic balances extremely require high mechanical properties of sensor modules. Flexible hinge is one key factor which has significant effects on mechanical properties of sensor modules. The main manufacturing difficulty of flexible hinge is to achieve a complete, very thin (minimum thickness is less than 0.1 mm) metal connection, and the thickness consistency of multiple hinges needs to be controlled below 5 μm. Limited by the manufacturing technology of sensor modules, the high-precision electronic balances at a scale of 0.01 mg in China still rely on import. Therefore, it is urgent to develop high-accuracy manufacturing method of flexible hinge, improve the manufacturing technology of sensor modules. In this paper, the different manufacturing experiments of flexible hinge were carried out, the advantages and disadvantages of milling, reaming and drilling were analyzed and compared, and the processing parameters are optimized. Finally, the flexible hinge was stably processed.
Precision electronic balances extremely require high mechanical properties of sensor modules. Flexible hinge is one key factor which has significant effects on mechanical properties of sensor modules. The main manufacturing difficulty of flexible hinge is to achieve a complete, very thin (minimum thickness is less than 0.1 mm) metal connection, and the thickness consistency of multiple hinges needs to be controlled below 5 μm. Limited by the manufacturing technology of sensor modules, the high-precision electronic balances at a scale of 0.01 mg in China still rely on import. Therefore, it is urgent to develop high-accuracy manufacturing method of flexible hinge, improve the manufacturing technology of sensor modules. In this paper, the different manufacturing experiments of flexible hinge were carried out, the advantages and disadvantages of milling, reaming and drilling were analyzed and compared, and the processing parameters are optimized. Finally, the flexible hinge was stably processed.




2018, 37(12): 1948-1955.
doi: 10.13433/j.cnki.1003-8728.20180085
Abstract:
This paper studies the permanent magnet eddy current coupling of a double disc and its mechanisms. It established the finite element model of its magnetic field; the three-dimensional transient calculation results show that the three-dimensional magnetic conductor of the double disk's density distribution, permanent magnet and magnetic flux density is similar in shape and concentration; the number of permanent magnet poles are equal. In addition, the yoke disc's three-dimensional magnetic field distribution has the shape of radiation and the level of flux density adjacent to the area of the layout. The conductor is generated and equals to the number of permanent magnet eddy current loops. The density of eddy current in the opposite direction of adjacent areas and in the middle part of the eddy current is low; the permanent magnet is located at that junction. The density of the eddy current loop in the adjacent area is the highest. When the slip increases, the average torque increases, and the slip is approximately linear with the mean torque. The simulation results show that the simulation model is accurate. The orthogonal experimental method shows that the orders of major and minor factors are the number of magnetic poles and the width, length and thickness of permanent magnet under experimental constraints. The optimal parameters of permanent magnet govern the permanent magnet eddy current. The results show that compared with the original structure, the average torque increases by 14.2%, the torque density increases by 18.0%, and the permanent magnet material decreases by 3.2%.
This paper studies the permanent magnet eddy current coupling of a double disc and its mechanisms. It established the finite element model of its magnetic field; the three-dimensional transient calculation results show that the three-dimensional magnetic conductor of the double disk's density distribution, permanent magnet and magnetic flux density is similar in shape and concentration; the number of permanent magnet poles are equal. In addition, the yoke disc's three-dimensional magnetic field distribution has the shape of radiation and the level of flux density adjacent to the area of the layout. The conductor is generated and equals to the number of permanent magnet eddy current loops. The density of eddy current in the opposite direction of adjacent areas and in the middle part of the eddy current is low; the permanent magnet is located at that junction. The density of the eddy current loop in the adjacent area is the highest. When the slip increases, the average torque increases, and the slip is approximately linear with the mean torque. The simulation results show that the simulation model is accurate. The orthogonal experimental method shows that the orders of major and minor factors are the number of magnetic poles and the width, length and thickness of permanent magnet under experimental constraints. The optimal parameters of permanent magnet govern the permanent magnet eddy current. The results show that compared with the original structure, the average torque increases by 14.2%, the torque density increases by 18.0%, and the permanent magnet material decreases by 3.2%.











2018, 37(12): 1956-1962.
doi: 10.13433/j.cnki.1003-8728.20180228
Abstract:
Based on the friction power method, the thermal load simulation and boundary condition of the CRH380BL type high speed EMU (Electric multiple unit) are studied. The ANSYS software is used to simulate the distribution of the 3D transient temperature field in the radial, axial and deep direction of the brake disc during the emergency braking process of 350 km/h, and the braking capability is analyzed from the highest temperature that the brake disc can bear. The results show that the friction surface of the shaft disk has a circular distribution at the initial stage of braking, because the radiation rib has a good heat dissipation function, and then the cluster of high temperature area is produced on the friction ring between the cooling ribs; and next, the temperature of the brake disc is layered and the temperature decrease progressively from the upper surface to down surface of the brake disc. At the same time, the temperature decreases gradually, and the temperature decreases with the position of the axle center hole. Results indicate that the temperature distribution of the shaft disc is influenced by the shaft disk structure during the shaft disc braking process.
Based on the friction power method, the thermal load simulation and boundary condition of the CRH380BL type high speed EMU (Electric multiple unit) are studied. The ANSYS software is used to simulate the distribution of the 3D transient temperature field in the radial, axial and deep direction of the brake disc during the emergency braking process of 350 km/h, and the braking capability is analyzed from the highest temperature that the brake disc can bear. The results show that the friction surface of the shaft disk has a circular distribution at the initial stage of braking, because the radiation rib has a good heat dissipation function, and then the cluster of high temperature area is produced on the friction ring between the cooling ribs; and next, the temperature of the brake disc is layered and the temperature decrease progressively from the upper surface to down surface of the brake disc. At the same time, the temperature decreases gradually, and the temperature decreases with the position of the axle center hole. Results indicate that the temperature distribution of the shaft disc is influenced by the shaft disk structure during the shaft disc braking process.






2018, 37(12): 1963-1968.
doi: 10.13433/j.cnki.1003-8728.20180088
Abstract:
Local buckling of the thin skin of the fuselage stiffened panel below limit load is not allowed under current design criterion, then it is very important to accurately predict the buckling load of the thin skin. Three different composite stiffened panel configurations are designed to investigate the buckling process of the skin under compressive load; Modified engineering approach and linear eigenvalue analysis are employed to calculate the buckling load of the skin; a liner superposition of the buckling modes was used to impose out-of-plane geometric imperfection of the skin; the buckling load of the skin with geometry imperfection is calculated by using the nonlinear finite element method and the sensitivity analysis is also conducted. The comparison between the calculated results and the experimental proved that the nonlinear finite element analysis considering geometry imperfection can be used to predict the buckling load of the thin skin.
Local buckling of the thin skin of the fuselage stiffened panel below limit load is not allowed under current design criterion, then it is very important to accurately predict the buckling load of the thin skin. Three different composite stiffened panel configurations are designed to investigate the buckling process of the skin under compressive load; Modified engineering approach and linear eigenvalue analysis are employed to calculate the buckling load of the skin; a liner superposition of the buckling modes was used to impose out-of-plane geometric imperfection of the skin; the buckling load of the skin with geometry imperfection is calculated by using the nonlinear finite element method and the sensitivity analysis is also conducted. The comparison between the calculated results and the experimental proved that the nonlinear finite element analysis considering geometry imperfection can be used to predict the buckling load of the thin skin.









2018, 37(12): 1969-1974.
doi: 10.13433/j.cnki.1003-8728.20180097
Abstract:
Silicon carbide (SiC) single crystal wafer is difficult to be machined, which must be lapped and polished. The material removal rate (MRR) is an important factor in the lapping and polishing of SiC single crystal wafer, and which has great significance for SiC single crystal wafer processing. In traditional process of grinding and polishing, the deficiency of material removal rate (MRR) model is due to considering friction and wear of abrasive particles. Considered the material removal of the lapping particles in the extrusion stage, a new model for material removal rate of SiC single crystal wafer is established. According to the contact state between SiC single crystal wafer, particles and pad, a new model for MRR is established contain embedded phases and the friction and wear of the material removal rate. Combing the hardness and modulus of elasticity for grinding experiments, the experimental results are compared with the predicted. It is concluded that the predicted via the present MRR model is closer to the physical truth.
Silicon carbide (SiC) single crystal wafer is difficult to be machined, which must be lapped and polished. The material removal rate (MRR) is an important factor in the lapping and polishing of SiC single crystal wafer, and which has great significance for SiC single crystal wafer processing. In traditional process of grinding and polishing, the deficiency of material removal rate (MRR) model is due to considering friction and wear of abrasive particles. Considered the material removal of the lapping particles in the extrusion stage, a new model for material removal rate of SiC single crystal wafer is established. According to the contact state between SiC single crystal wafer, particles and pad, a new model for MRR is established contain embedded phases and the friction and wear of the material removal rate. Combing the hardness and modulus of elasticity for grinding experiments, the experimental results are compared with the predicted. It is concluded that the predicted via the present MRR model is closer to the physical truth.










